Journal of South China University of Technology(Natural Science Edition) ›› 2026, Vol. 54 ›› Issue (3): 52-64.doi: 10.12141/j.issn.1000-565X.250056
• Intelligent Transportation System • Previous Articles Next Articles
Predictive Motion Planning for Intelligent Connected Vehicles Based on Transformer Architecture
LI Anran1,2, PAN Yuyan3, XU Zhenlin4, GAO Bolin2, LI Yongxing1, YU Hongsheng5, CHEN Yanyan1
- 1.College of Metropolitan Transportation,Beijing University of Technology,Beijing 100124,China
2.School of Vehicle and Mobility,Tsinghua University,Beijing 100084,China
3.Department of Civil and Environmental Engineering,Pennsylvania State University,PA 16802,USA
4.Faculty of Civil Engineering and Geosciences,Delft University of Technology,Delft 2826 CN,Netherlands
5.Institute of Electronic Computing Technology,China Railway Academy Group Co. ,Ltd. ,Beijing 100081,China
-
Received:2025-03-05Online:2026-03-25Published:2025-09-26 -
About author:李安然(1997—),男,博士生,主要从事智能交通、自动驾驶研究。E-mail: lianran@emails.bjut.edu.cn -
Supported by:the Young Scientists Fund of the National Natural Science Foundation of China(52402375);the Key Science and Technology Program of the Transportation Industry, Ministry of Transport(2021-ZD2-047)
CLC Number:
Cite this article
LI Anran, PAN Yuyan, XU Zhenlin, GAO Bolin, LI Yongxing, YU Hongsheng, CHEN Yanyan. Predictive Motion Planning for Intelligent Connected Vehicles Based on Transformer Architecture[J]. Journal of South China University of Technology(Natural Science Edition), 2026, 54(3): 52-64.
share this article
Fig.1
ST-Trans architecture"
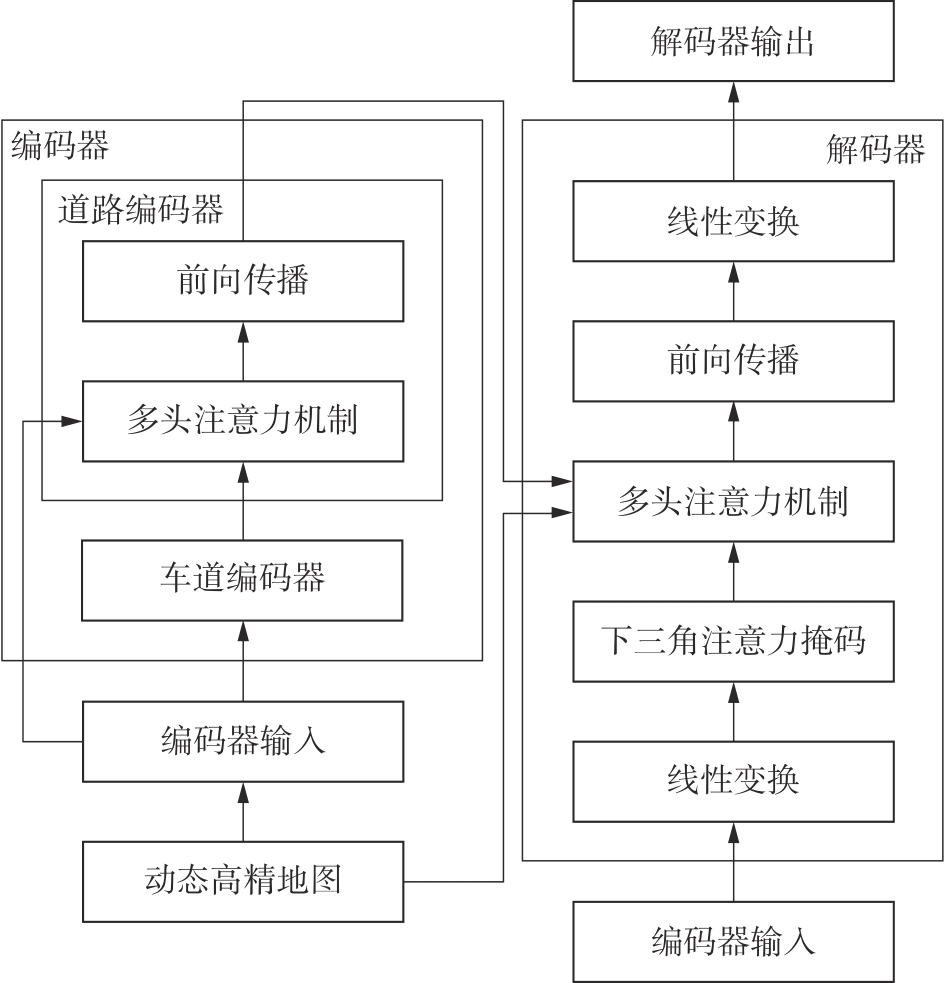
Fig.2
Path planning process"
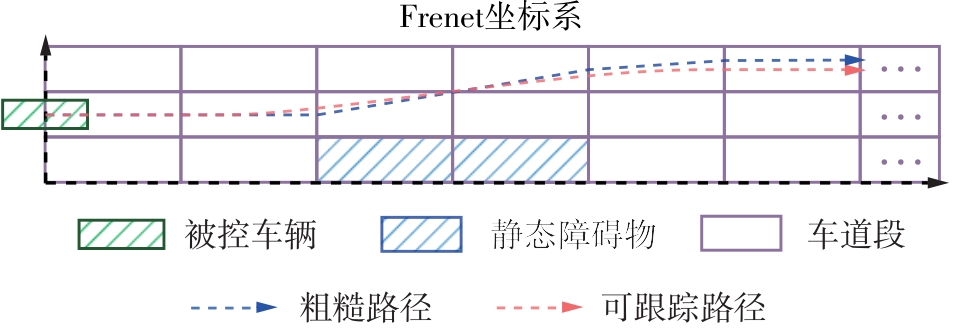
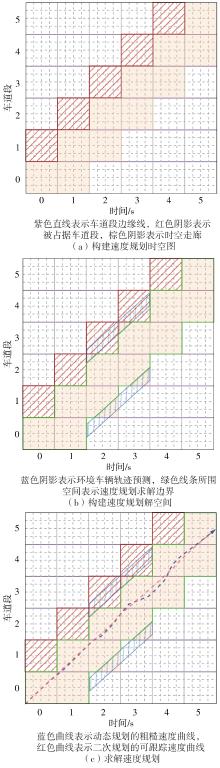
Fig.3
Speed planning process"
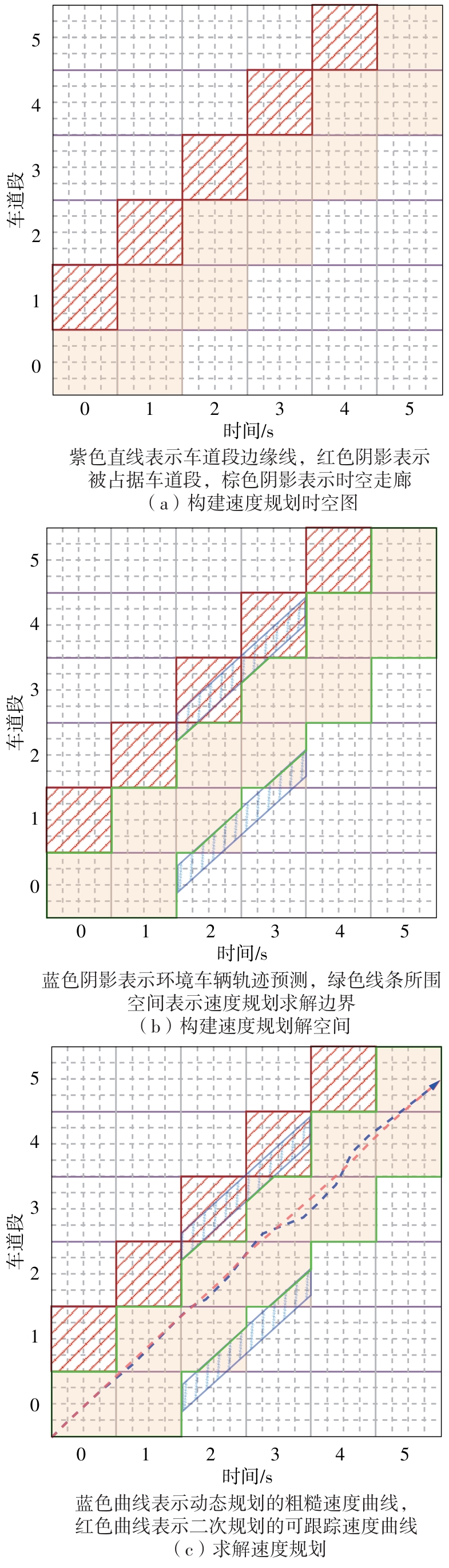
Table 1
Performance comparison between ST-Trans and baseline models"
| 模型 | MAE | RMSE | ACC/% |
|---|---|---|---|
| ARIMA | 0.509 | 1.007 | 69.91 |
| RF | 0.417 | 0.815 | 78.95 |
| SVR | 0.434 | 0.849 | 77.81 |
| FNN | 0.337 | 0.664 | 84.77 |
| AGCRN | 0.316 | 0.624 | 86.83 |
| GWN | 0.303 | 0.593 | 88.43 |
| ST-Trans | 0.266 | 0.521 | 91.98 |
Table 2
Impacts of diverse function modules to the performance of ST-Trans"
| 模型 | MAE | RMSE | ACC/% |
|---|---|---|---|
| ST-TransnoVT | 0.284 | 0.561 | 90.02 |
| ST-TransnoVA | 0.274 | 0.539 | 90.66 |
| ST-TransnoLT | 0.280 | 0.563 | 90.19 |
| ST-TransnoLD | 0.271 | 0.536 | 91.00 |
| ST-TransnoST | 0.314 | 0.627 | 88.34 |
| ST-Trans | 0.266 | 0.521 | 91.98 |
Table 3
Impacts of diverse hyperparameters on the performance of ST-Trans"
| 超参数 | MAE | RMSE | ACC/% |
|---|---|---|---|
| Th = 2 | 0.404 | 0.791 | 80.61 |
| Th = 3 | 0.353 | 0.698 | 85.79 |
| Th = 4 | 0.309 | 0.605 | 88.84 |
| Th = 5 | 0.286 | 0.566 | 90.29 |
| Th = 6 | 0.272 | 0.538 | 91.16 |
| Th = 7 | 0.266 | 0.521 | 91.98 |
| Th = 8 | 0.264 | 0.517 | 92.25 |
| Tp = 10 | 0.248 | 0.497 | 92.96 |
| Tp = 15 | 0.254 | 0.508 | 92.50 |
| Tp = 20 | 0.266 | 0.521 | 91.98 |
| Tp = 25 | 0.289 | 0.568 | 89.98 |
| dh = 16 | 0.274 | 0.537 | 90.81 |
| dh = 32 | 0.269 | 0.529 | 91.62 |
| dh = 64 | 0.266 | 0.521 | 91.98 |
| dh = 128 | 0.264 | 0.518 | 92.11 |
| Nh = 2 | 0.279 | 0.560 | 90.34 |
| Nh = 4 | 0.268 | 0.528 | 91.69 |
| Nh = 8 | 0.266 | 0.521 | 91.98 |
| Nh = 16 | 0.268 | 0.526 | 91.77 |
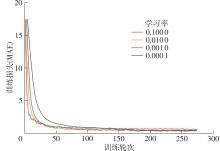
Fig.4
Convergence curves of ST-Trans at different learning rates"
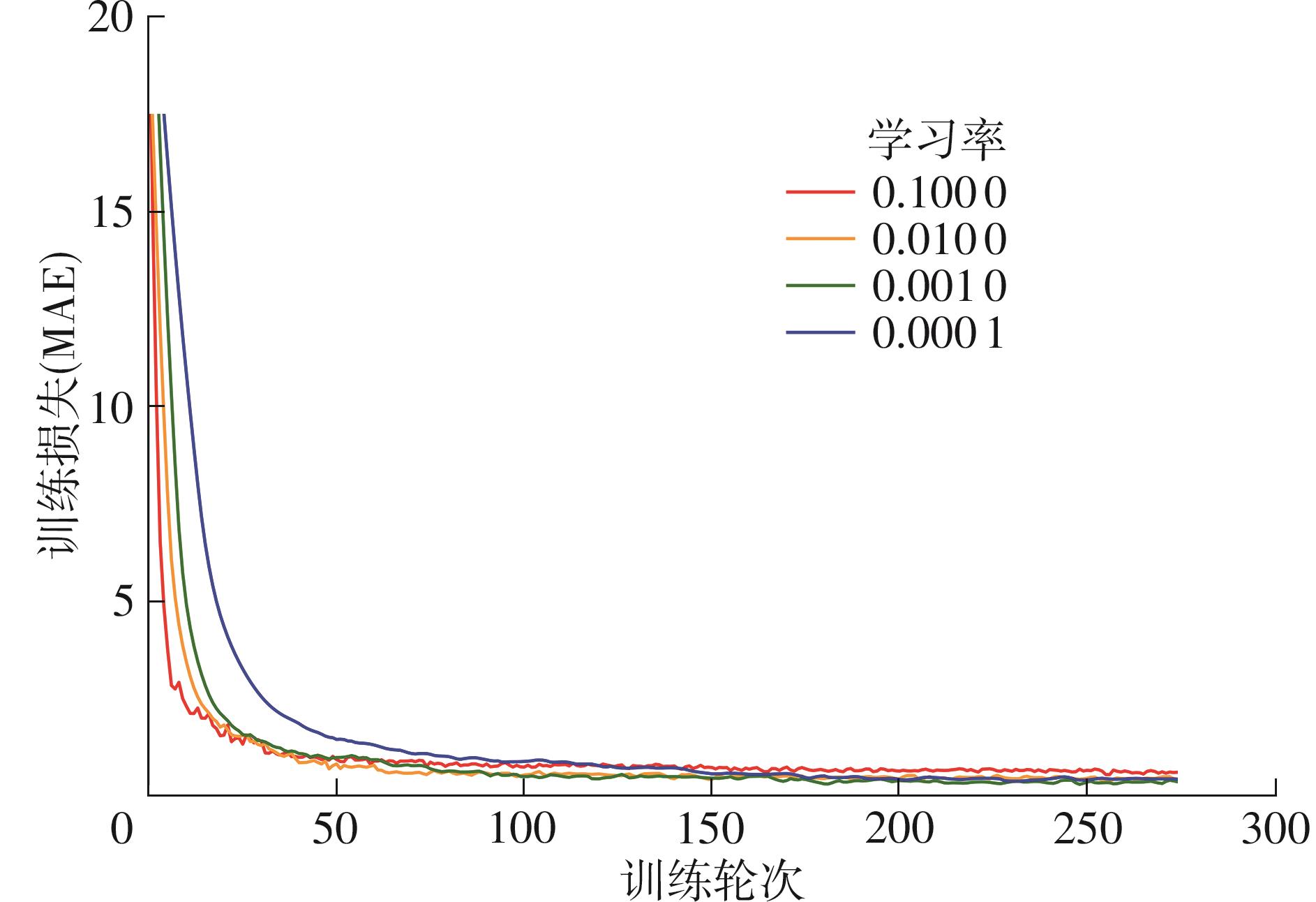

Fig.5
SUMO-CARLA joint simulation platform"
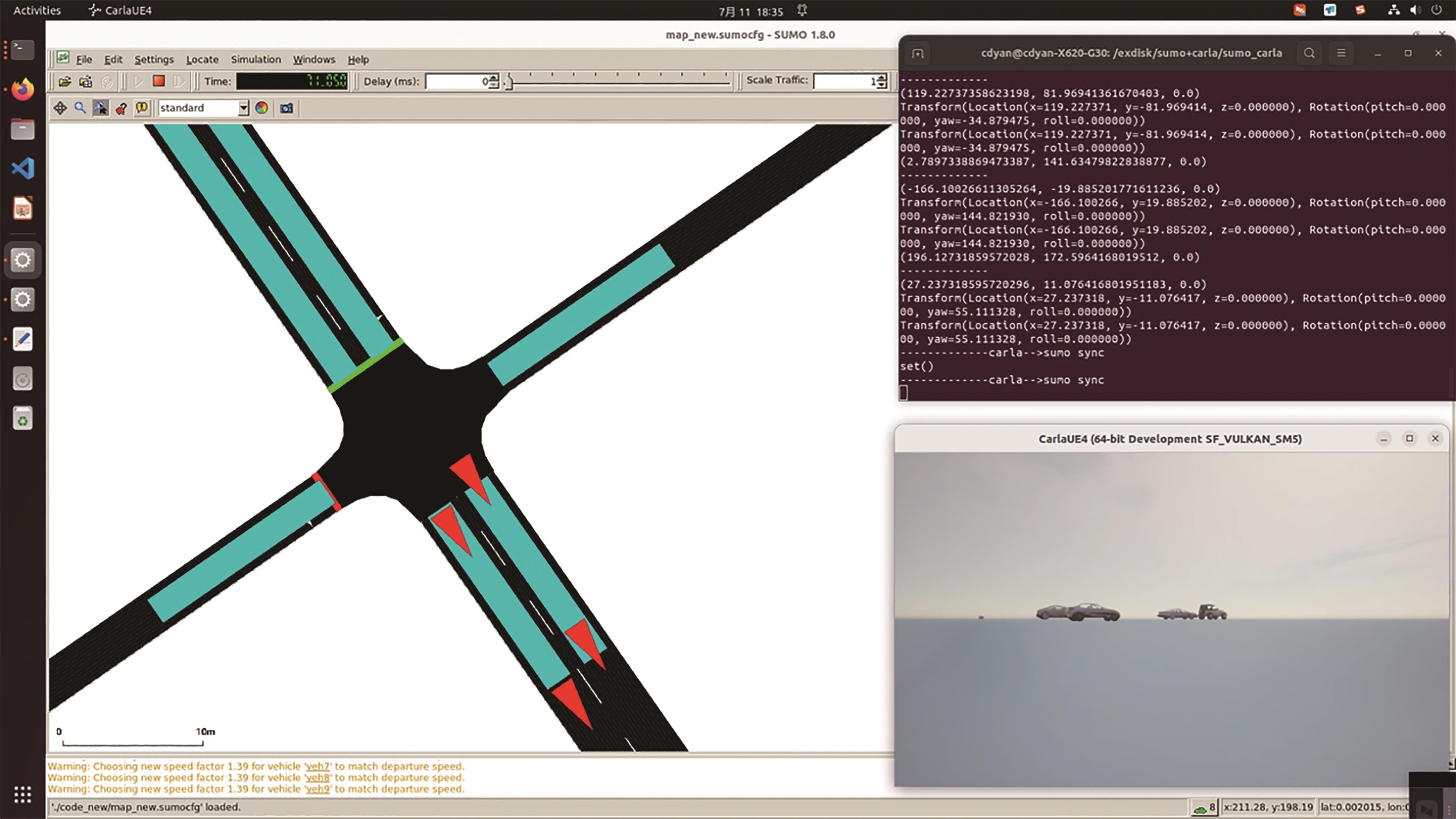

Fig.6
Curves of vehicle motion parameters"
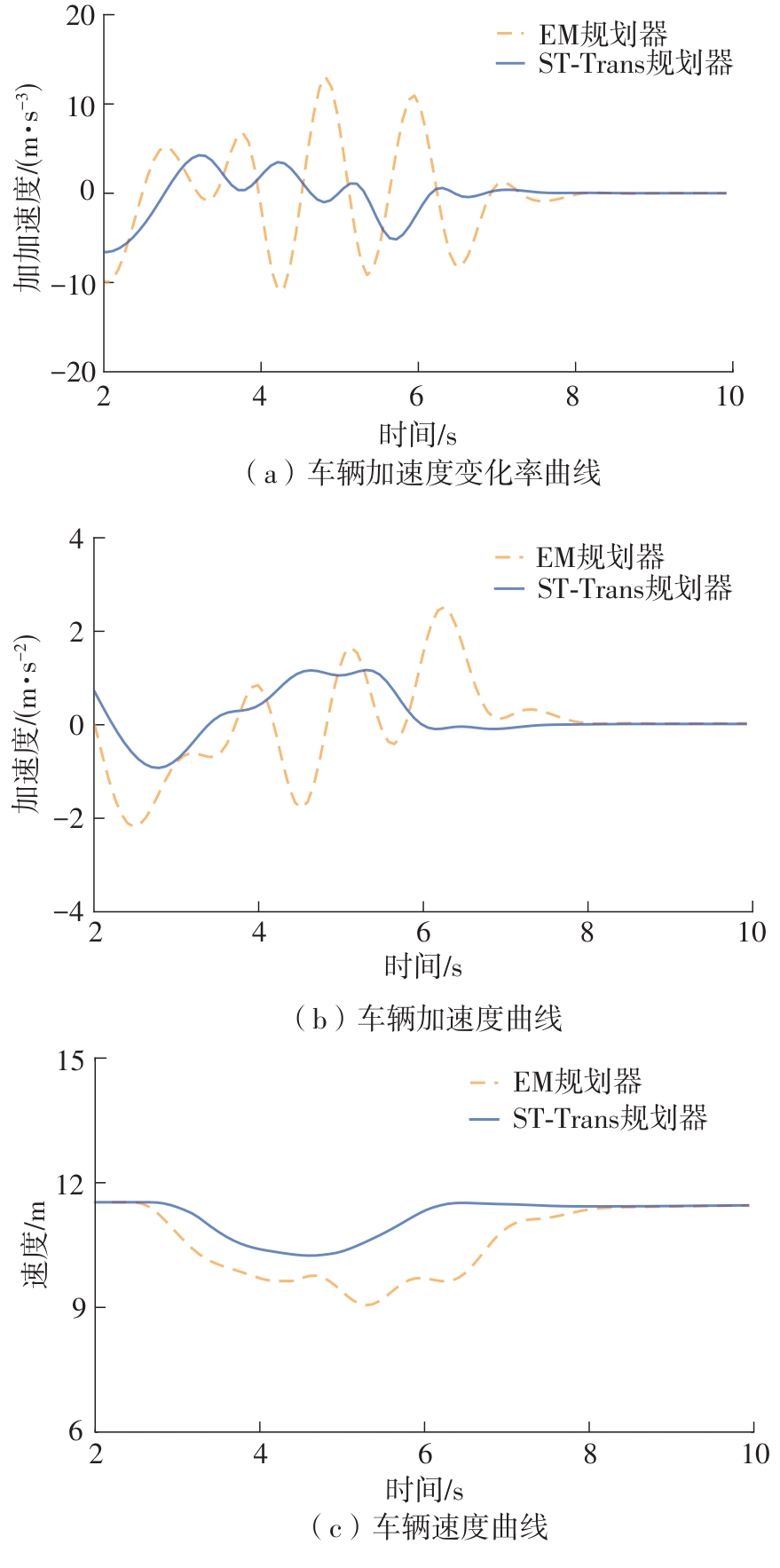
Table 4
Performance comparison between EM planner and ST-Trans planner"
| 场景 | 行为 | 模型 | 碰撞时间 | 平均通行时长 | 平均计算延误 | ||
|---|---|---|---|---|---|---|---|
| 高风险状态 | 风险预警状态 | 安全状态 | |||||
| 低密度 | 直行 | EM规划器 | 1.76 | 3.27 | 6.12 | 11.15 | 0.087 |
| ST-Trans规划器 | 0.65 | 6.31 | 3.07 | 10.03 | 0.069 | ||
| 左转 | EM规划器 | 2.55 | 3.13 | 10.95 | 16.63 | 0.102 | |
| ST-Trans规划器 | 0.98 | 9.65 | 4.53 | 15.16 | 0.075 | ||
| 右转 | EM规划器 | 2.29 | 3.57 | 7.60 | 13.46 | 0.095 | |
| ST-Trans规划器 | 1.14 | 7.34 | 3.59 | 12.07 | 0.073 | ||
| 高密度 | 直行 | EM规划器 | 2.52 | 4.33 | 8.42 | 15.27 | 0.094 |
| ST-Trans规划器 | 1.04 | 8.79 | 4.23 | 14.06 | 0.070 | ||
| 左转 | EM规划器 | 3.95 | 4.53 | 14.86 | 23.34 | 0.106 | |
| ST-Trans规划器 | 1.98 | 13.14 | 6.23 | 21.35 | 0.077 | ||
| 右转 | EM规划器 | 3.75 | 4.91 | 10.46 | 19.12 | 0.102 | |
| ST-Trans规划器 | 1.92 | 10.09 | 5.53 | 17.54 | 0.076 | ||
| [1] | GAO B, WAN K, CHEN Q, et al .A review and outlook on predictive cruise control of vehicles and typical applications under cloud control system[J].Machine Intelligence Research, 2023, 20(5): 614-639. |
| [2] | BAO Z, HOSSAIN S, LANG H, et al .High-definition map generation technologies for autonomous driving[EB/OL].(2022-06-24)[2025-11-10].arXiv preprint,2022:arXiv:. |
| [3] | DONG J, XU Q, WANG H, et al .Mixed cloud control testbed:validating vehicle-road-cloud integration via mixed digital twin[J].IEEE Transactions on Intelligent Vehicles, 2023, 8(4): 2723-2736. |
| [4] | 冯昶,杜清运,范晓宇,等 .高精动态地图基础平台众源更新技术路线研究[J].测绘地理信息,2023,48(1): 10-15. |
| FENG Chang, DU Qingyun, FAN Xiaoyu, et al .A crowdsourcing update technology route of HD dynamic map basic platform[J].Journal of Geomatics,2023,48(1): 10-15. | |
| [5] | SUNG I, CHOI B, NIELSEN P .On the training of a neural network for online path planning with offline path planning algorithms[J].International Journal of Information Management, 2021, 57: 102142/1-9. |
| [6] | NOTO M, SATO H .A method for the shortest path search by extended Dijkstra algorithm[C]∥Proceedings of the 2000 IEEE International Conference on Systems,Man and Cybernetics.Nashville:IEEE,2000: 8-11. |
| [7] | ZHANG Z, ZHAO Z .A multiple mobile robots path planning algorithm based on A-star and Dijkstra algorithm[J].International Journal of Smart Home,2014,8(3):75-86. |
| [8] | SCHMERLING E, JANSON L, PAVONE M .Optimal sampling-based motion planning under differential constraints: the drift case with linear affine dynamics[C]∥Proceedings of the 54th IEEE Conference on Decision and Control.Osaka: IEEE, 2015: 5-18. |
| [9] | KUFFNER J, LAVALLE S .RRT-connect: an efficient approach to single-query path planning[C]∥Proceedings of the 2 000 IEEE International Conference on Robotics and Automation.San Francisco:IEEE,2 000:995-1001. |
| [10] | REDDY T, SUPREETHI K .Optimization of K-means algorithm: ant colony optimization[C]∥Proceedings of the 2017 International Conference on Computing Methodologies and Communication.Erode:IEEE,2017:530-535. |
| [11] | XIN J, ZHONG J, YANG F, et al .An improved genetic algorithm for path-planning of unmanned surface vehicle[J].Sensors, 2019, 19(11): 2640/1-23. |
| [12] | PADEN B, ČÁP M, YONG S Z, et al .A survey of motion planning and control techniques for self-driving urban vehicles[J].IEEE Transactions on Intelligent Vehicles, 2016, 1(1): 33-55. |
| [13] | DUBINS L .On curves of minimal length with a constraint on average curvature, and with prescribed initial and terminal positions and tangents[J].American Journal of Mathematics, 1957, 79(3): 497-516. |
| [14] | REEDS J, SHEPP L .Optimal paths for a car that goes both forward and backward[J].Pacific Journal of Mathematics, 1991, 145(2): 367-393. |
| [15] | WANG S, WANG Y, TAN M, et al .Path planning of underwater biomimetic robot[M]∥Underwater Biomimetic Vehicle-Manipulator System.Singapore:Springer,2023: 89-125. |
| [16] | LIANG Z, ZHENG G, LI J .Automatic parking path optimization based on Bezier curve fitting[C]∥Proceedings of the 2012 IEEE International Conference on Automation and Logistics.Zhengzhou:IEEE,2012:583-587. |
| [17] | ZIEGLER J, BENDER P, DANG T, et al .Trajectory planning for Bertha—a local, continuous method[C]∥Proceedings of the 2014 IEEE Intelligent Vehicles Symposium.Dearborn:IEEE,2014:450-457. |
| [18] | WERLING M, KAMMEL S, ZIEGLER J, et al .Optimal trajectories for time-critical street scenarios using discretized terminal manifolds[J].The International Journal of Robotics Research, 2012, 31(3):346-359. |
| [19] | YU L, SHAO X, WEI Y, et al .Intelligent land-vehicle model transfer trajectory planning method based on deep reinforcement learning[J].Sensors,2018,18(9): 2905/1-22. |
| [20] | CHAI R, LIU D, LIU T, et al .Deep learning-based trajectory planning and control for autonomous ground vehicle parking maneuver[J].IEEE Transactions on Automation Science and Engineering, 2023,20(3): 1633-1647. |
| [21] | VASWANI A, SHAZEER N, PARMAR N, et al .Attention is all you need[C]∥Proceedings of 31st Conference on Neural Information Processing Systems.Long Beach: NIPS, 2017: 6000-6010. |
| [22] | BARMPOUNAKIS E, GEROLIMINIS N .On the new era of urban traffic monitoring with massive drone data: the pNEUMA large-scale field experiment[J].Transportation Research Part C: Emerging Technologies, 2020, 111: 50-71. |
| [23] | WERLING M, ZIEGLER J, KAMMEL S, et al .Optimal trajectory generation for dynamic street scenarios in a frenét frame[C]∥Proceedings of the 2010 IEEE International Conference on Robotics and Automation.Anchorage: IEEE, 2010: 987-993. |
| [24] | MCNAUGHTON M, URMSON C, DOLAN J, et al .Motion planning for autonomous driving with a conformal spatiotemporal lattice[C]∥Proceedings of the 2011 IEEE International Conference on Robotics and Automation.Shanghai: IEEE, 2011: 4889-4895. |
| [25] | PIVTORAIKO M, KELLY A .Differentially constrained motion replanning using state lattices with graduated fidelity[C]∥Proceedings of the 2008 IEEE/RSJ International Conference on Intelligent Robots and Systems.Nice: IEEE, 2008: 2611-2616. |
| [26] | ZIEGLER J, BENDER P, SCHREIBER M, et al .Making bertha drive—an autonomous journey on a historic route[J].IEEE Intelligent Transportation Systems Magazine, 2014, 6(2): 8-20. |
| [27] | ZHOU Z, YE L, WANG J, et al .HiVT: Hierarchical vector transformer for multi-agent motion prediction[C]∥Proceedings of the 2022 IEEE/CVF Confe-rence on Computer Vision and Pattern Recognition.New Orleans: IEEE, 2022: 8813-8823. |
| [28] | MERCY T, van PARYS R, PIPELEERS G .Spline-based motion planning for autonomous guided vehicles in a dynamic environment[J].IEEE Transactions on Control Systems Technology,2017, 26(3):1-8. |
| [29] | LI A, XU Z, LI W, et al .Urban signalized intersection traffic state prediction:a spatial-temporal graph model integrating the cell transmission model and transformer[J].Applied Sciences,2025,15(5):2377/1-23. |
| [30] | HAMED M, AL-MASAEID H, SAID Z .Short-term prediction of traffic volume in urban arterials[J].Journal of Transportation Engineering,1995,121(3):249-254. |
| [31] | DRUCKER H, BURGES C, KAUFMAN L, et al .Support vector regression machines[J].Advances in Neural Information Processing Systems, 1997, 9:779-784. |
| [32] | ATHEY S, TIBSHIRANI J, WAGER S .Genera-lized random forests[J].The Annals of Statistics,2019, 47(2): 1148-1178. |
| [33] | YE Q, WONG S, SZETO W .Short-term traffic speed forecasting based on data recorded at irregular intervals[C]∥Proceedings of 2010 13th International IEEE Annual Conference on Intelligent Transportation Systems. Madeira Island: IEEE,2010: 1541-1546. |
| [34] | XU Y, LU Y, JI C, et al .Adaptive graph fusion convolutional recurrent network for traffic forecasting[J].IEEE Internet of Things Journal,2023,10(13):11465-11475. |
| [35] | WU Z, PAN S, LONG G, et al .Graph wavenet for deep spatial-temporal graph modeling[EB/OL].(2019-03-31)[2025-11-10].arXiv preprint, 2019: arXiv:. |
| [36] | LOPEZ P, BEHRISCH M, BIEKER-WALZ L,et al .Microscopic traffic simulation using SUMO[C]∥Proceedings of the 2018 21st International Conference on Intelligent Transportation Systems.Maui:IEEE,2018:2575-2582. |
| [37] | DOSOVITSKIY A, ROS G, CODEVILLA F, et al .CARLA: an open urban driving simulator[C]∥Proceedings of the 1st Conference on Robot Learning.Mountain View: PMLR, 2017: 1-16. |
| [38] | FAN H, ZHU F, LIU C, et al .Baidu Apollo EM motion planner[EB/OL].(2018-07-20)[2025-11-10].arXiv preprint,2018:arXiv:. |
| [39] | WESTHOFEN L, NEUROHR C, KOOPMANN T,et al .Criticality metrics for automated driving: a review and suitability analysis of the state of the art[J].Archives of Computational Methods in Engineering,2023,30(1):1-35. |
| [1] | WANG Dehong, ZHANG Zixuan. Transmission Tower Bolt Looseness Detection Based on Improved YOLOv5s [J]. Journal of South China University of Technology(Natural Science Edition), 2026, 54(2): 25-37. |
| [2] | LING Fei, GU Xuerong. Prediction of Target Inhibitor Activity by Integrating Machine Learning and Metaheuristic Algorithms [J]. Journal of South China University of Technology(Natural Science Edition), 2026, 54(2): 91-101. |
| [3] | YANG Junmei, ZHANG Bangcheng, YANG Lu, ZENG Delu. A Single-Channel Speech Separation Model Based on Time-Domain Comprehensive Attention Mechanism [J]. Journal of South China University of Technology(Natural Science Edition), 2026, 54(1): 70-82. |
| [4] | CHEN Cheng, WANG Miao, WANG Xinyao, GAO Zhiming, ZHOU Xuan, YAN Junwei. Multi-Working Condition Energy Consumption Anomaly Detection Method for Office Building Lighting Sockets Based on LSTM-AE [J]. Journal of South China University of Technology(Natural Science Edition), 2025, 53(9): 117-126. |
| [5] | YUE Yongheng, ZHAO Zhihao. Lane Line Detection Algorithm Based on Deep Learning [J]. Journal of South China University of Technology(Natural Science Edition), 2025, 53(9): 22-30. |
| [6] | ZUO Bin, DONG Tianhang, ZHANG Zehui, WANG Huajun, HUO Weiwei, GONG Wenfeng, CHENG Junsheng. Proton Exchange Membrane Fuel Cell Fault Prediction Method Based on Deep Learning [J]. Journal of South China University of Technology(Natural Science Edition), 2025, 53(7): 21-30. |
| [7] | HU Guanghua, DAI Zhigang, WANG Qinghui. Machining Feature Recognition Method of B-Rep Model Based on Graph Neural Network [J]. Journal of South China University of Technology(Natural Science Edition), 2025, 53(5): 20-31. |
| [8] | HU Xizhi, CUI Bofei, WANG Qin, LIU Hong. Visual SLAM Algorithm Based on Memory Parking Scene [J]. Journal of South China University of Technology(Natural Science Edition), 2024, 52(6): 1-11. |
| [9] | LIU Hao, YUAN Hui, CHEN Chen, GAO Wei. Point Cloud Geometry Coding Framework Based on Sampling [J]. Journal of South China University of Technology(Natural Science Edition), 2024, 52(6): 148-156. |
| [10] | YANG Chunling, LIANG Ziwen. Feature-Domain Proximal High-Dimensional Gradient Descent Network for Image Compressed Sensing [J]. Journal of South China University of Technology(Natural Science Edition), 2024, 52(3): 119-130. |
| [11] | ZHENG Juanyi, DONG Jiahao, ZHANG Qingjue, et al. Reconfigurable Intelligence Surface Channel Estimation Algorithm Based on RDN [J]. Journal of South China University of Technology(Natural Science Edition), 2024, 52(3): 102-111. |
| [12] | ZHOU Lang, FAN Kun, QU Hua, et al. Forest Fire Recognition by Improved EfficientNet-E Model Based on ECA Attention Mechanism [J]. Journal of South China University of Technology(Natural Science Edition), 2024, 52(2): 42-49. |
| [13] | CHEN Qiong, FENG Yuan, LI Zhiqun, YANG Yong. Semantic-Visual Consistency Constraint Network for Zero-Shot Image Semantic Segmentation [J]. Journal of South China University of Technology(Natural Science Edition), 2024, 52(10): 41-50. |
| [14] | LIU Weipeng, LI Xu, REN Ziwen, QI Yedong. Algorithm for Multiscale Residual Deformable Lung CT Image Registration [J]. Journal of South China University of Technology(Natural Science Edition), 2024, 52(10): 135-145. |
| [15] | HU Guanghua, TU Qianxi. Surface Defect Detection Method for Industrial Products Based on Photometric Stereo and Dual Stream Feature Fusion Network [J]. Journal of South China University of Technology(Natural Science Edition), 2024, 52(10): 112-123. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||