Journal of South China University of Technology(Natural Science Edition) ›› 2026, Vol. 54 ›› Issue (3): 31-51.doi: 10.12141/j.issn.1000-565X.250188
• Intelligent Transportation System • Previous Articles Next Articles
Research Advances in Learning-Based Generative Methods for Interactive Scenarios of Autonomous Vehicles
XIONG Lu, FENG Haojie, ZHANG Peizhi, TIAN Mengjie, ZHANG Xinrui
- College of Automotive and Energy/Clean Energy Automotive Engineering Centre,Tongji University,Shanghai 201804,China
-
Received:2025-06-30Online:2026-03-25Published:2025-09-12 -
Contact:张培志(1988—),男,博士,工程师,主要从事智能网联汽车测试、智能车辆控制研究。 E-mail:zhangpeizhi@tongji.edu.cn -
About author:熊璐(1978—),男,教授,博士生导师,主要从事新能源汽车底盘动力学控制、智能网联汽车测试研究。E-mail: xiong_lu@tongji.edu.cn -
Supported by:the National Key R & D Program of China(2024YFB2505704)
CLC Number:
Cite this article
XIONG Lu, FENG Haojie, ZHANG Peizhi, TIAN Mengjie, ZHANG Xinrui. Research Advances in Learning-Based Generative Methods for Interactive Scenarios of Autonomous Vehicles[J]. Journal of South China University of Technology(Natural Science Edition), 2026, 54(3): 31-51.
share this article
Fig.1
Interactive dataset processing workflow"
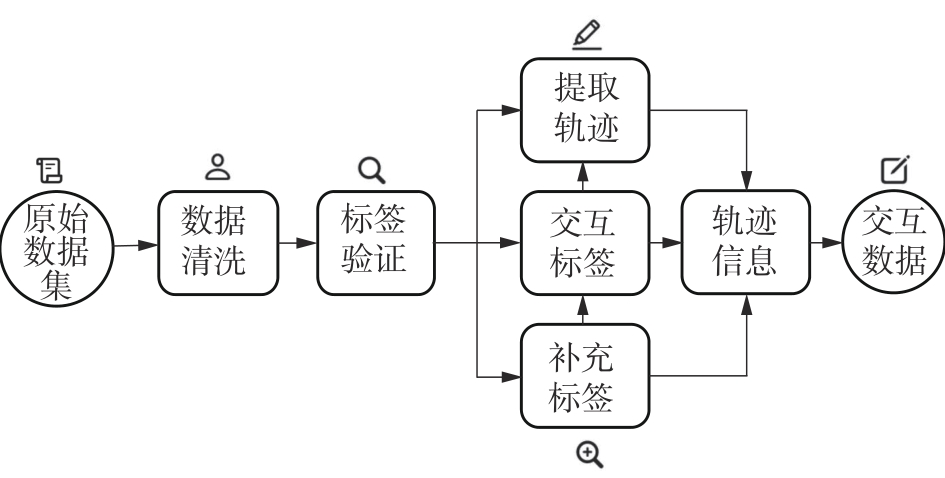
Table 1
Comparative analysis of interactive datasets"
| 数据集名称 | 交互轨迹 | 交互标注 | 交互路段 | 交互的交通参与者类型 | 应用情况 |
|---|---|---|---|---|---|
| NGSIM[ | 有 | 无 | G,C | j,f | U |
| KITTI[ | 无 | 有 | G,C,X | j,x,f | T |
| DDD17[ | 无 | 无 | G,C | j,x,f | P |
| HighD[ | 有 | 有 | G | j | U |
| HDD[ | 有 | 有 | G,C,J | j,x,f | T |
| BDD100K[ | 有 | 有 | G,C,X,J | j,x,f | U |
| ApolloScape[ | 有 | 有 | G,C,X | j,x,f | U |
| LyftLevel5(L5)[ | 有 | 有 | G,C | j,x,f | U |
| Argoverse[ | 有 | 有 | G,C,X | j,x,f | U |
| INTERACTION[ | 有 | 无 | G,C | j,x | U |
| PIE[ | 无 | 有 | C | x | T |
| H3D[ | 无 | 有 | G,C | j,x,f | T |
| PREVENTION[ | 有 | 有 | G | j,x,f | U |
| A*3D[ | 无 | 有 | G,C | j,x,f | T |
| DrivingStereo[ | 无 | 无 | G,C,X,J | j,x | P |
| TITAN[ | 有 | 有 | C | j,x,f | U |
| InD[ | 有 | 有 | C | j,x,f | U |
| RounD[ | 有 | 有 | C | j,x,f | U |
| FordMulti-AVSeasonal[ | 无 | 有 | G,C | j,x,f | T |
| Car Crash Dataset(CCD)[ | 无 | 有 | C | j,x,f | T |
| nuScenes[ | 无 | 有 | C | j,x,f | T |
| JAAD[ | 无 | 有 | C,X | j,x,f | T |
| DoTA[ | 无 | 有 | G,C,X | j,x,f | T |
| Mirror-Traffic[ | 有 | 有 | G,C | j,x,f | U |
| ExiD[ | 有 | 有 | G | j | U |
| UniD[ | 有 | 有 | U | j,x,f | U |
| WoodScape[ | 无 | 有 | G,C | j,x,f | T |
| Argoverse2[ | 有 | 有 | G,C | j,x,f | U |
| Waymo Open Motion[ | 有 | 有 | G,C | j,x,f | U |
| nuPlan[ | 有 | 有 | C | j,x,f | U |
| ROAD[ | 无 | 有 | C | j,x,f | T |
| ONCE[ | 无 | 有 | G,C,J | j,x,f | T |
| CitySim[ | 有 | 有 | G,C | j,x,f | U |
| YouTube Driving[ | 无 | 有 | C,X | j,x,f | T |
| DRAMA[ | 无 | 有 | C | j,x,f | T |
| DAIR-V2X[ | 无 | 有 | G,C | j,x,f | T |
| A9-Dataset[ | 无 | 有 | G | j,x,f | T |
| MONA[ | 有 | 有 | G,C | j | U |
| SIND[ | 有 | 有 | C | j,x,f | U |
| Ubiquitous Traffic Eyes[ | 有 | 有 | C | j | U |
| OATS[ | 无 | 无 | C,J | j,x,f | P |
| TUMTrafIntersection[ | 无 | 有 | C | j,x,f | T |
| TJRDTS全域轨迹[ | 有 | 有 | G | j | U |
| TUMTrafEvent[ | 有 | 有 | C | j,x,f | U |
| TUMTrafV2X[ | 有 | 有 | C | j,x,f | U |
| InterHub[ | 有 | 有 | G,C | j,x,f | U |
| DrivingDojo[ | 无 | 无 | G,C,X | j,x,f | P |
Fig.2
Comprehensive comparison of traditional learning-based methods for interactive scenario generation"
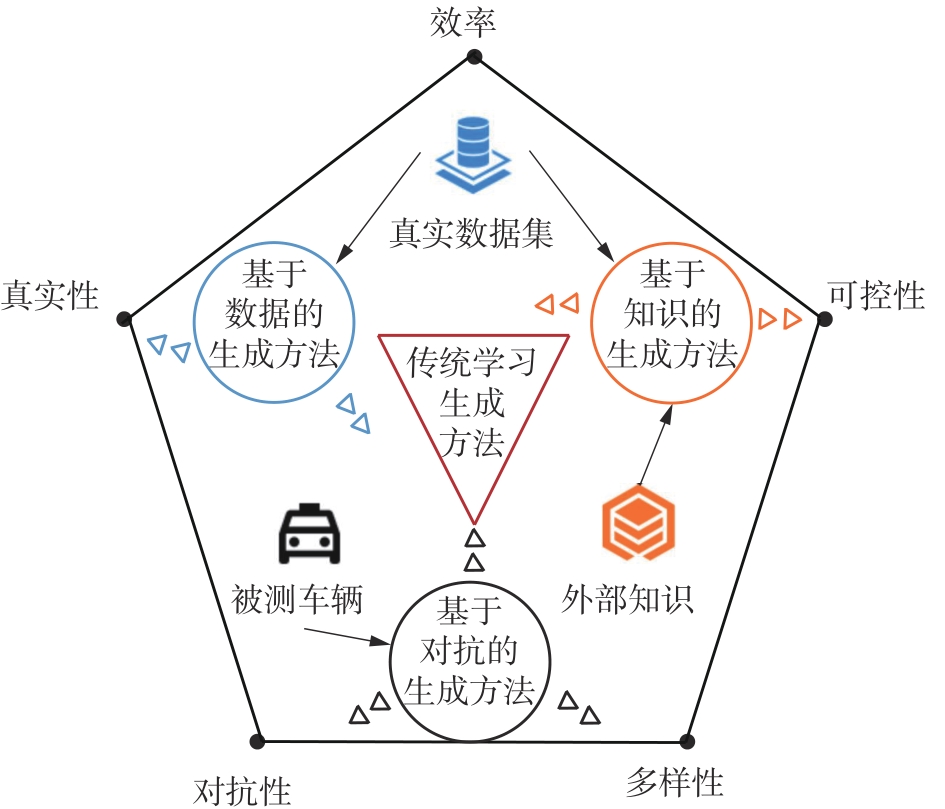
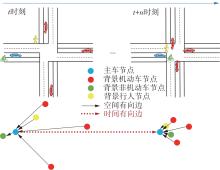
Fig.3
Schematic diagram of GNN structure in interactive scenarios"
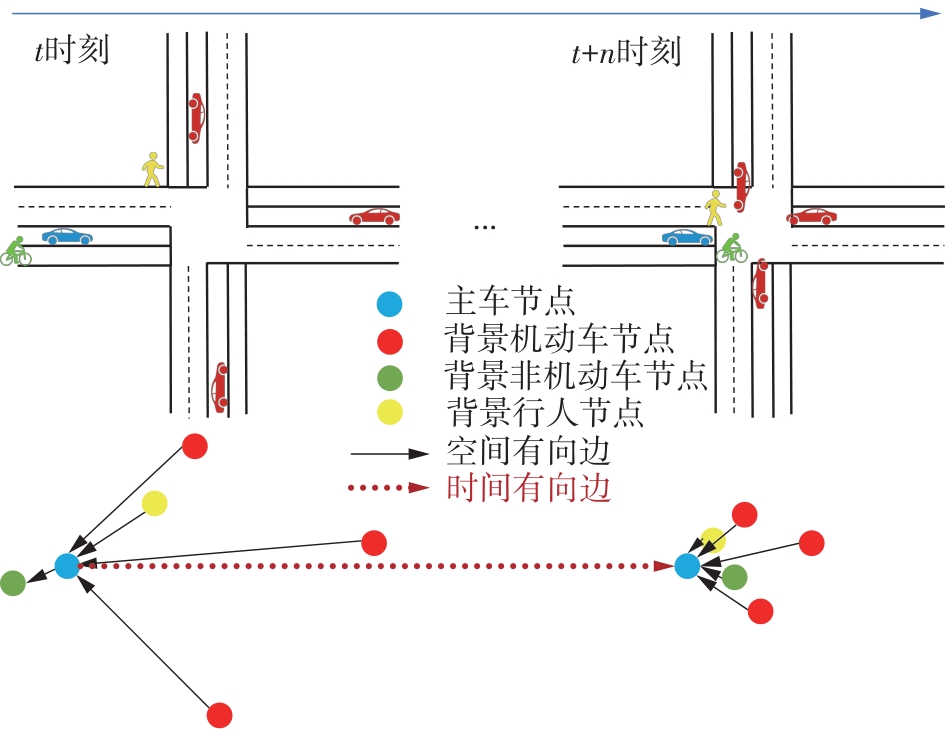

Fig.4
Schematic diagram of a scene generated by imitation learning"
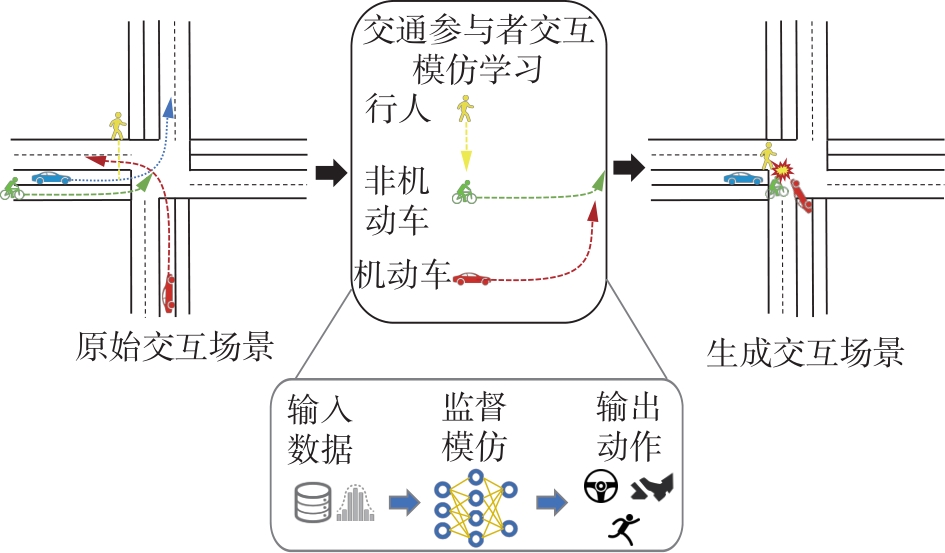

Fig.5
Simulation-generated rendering of an interactive scenario"

Table 2
Quantitative comparison of representative data-based generation methods"
| 典型方法 | 真实性 | 多样性 |
|---|---|---|
| 结合GNN和分布匹配损失[ | KID达0.072 FID达111.6 | 无 |
| 语法驱动无监督学习真实场景[ | KID达0.054 FID达99.7 | 无 |
| 结合扩散模型和轨迹预测模型[ | FID最优达35.75 | 与真实数据多样性差异百分比为1.25% |
| 利用GNN学习交通参与者行为[ | TRV达2.77%minSFDE达1.13 mminSADE达0.57 m | 地图感知的多样性指标达2.5 m |
| 基于扩散Transformer多智能体架构[ | 交互TTC达0.846ADE达2.045 mMinADE达1.472 m | 无 |
Fig.6
Schematic diagram of single-agent reinforcement learning"
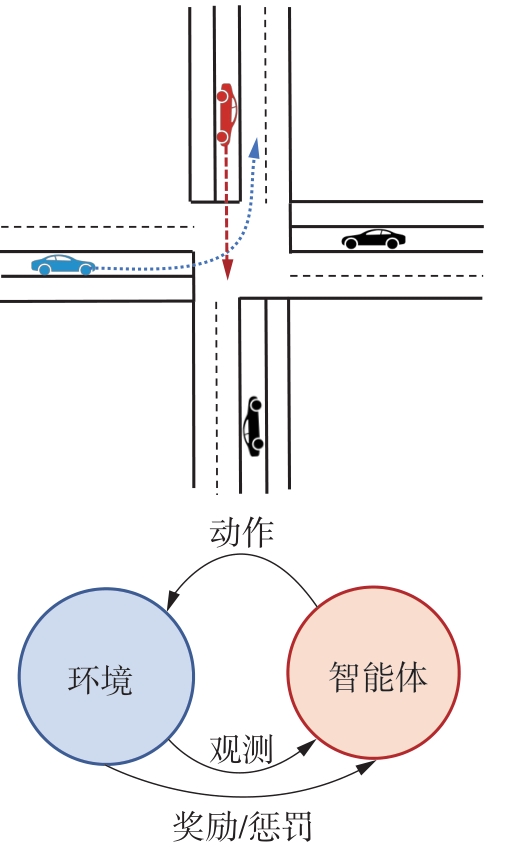
Fig.7
Schematic diagram of multi-agents reinforcement learning"
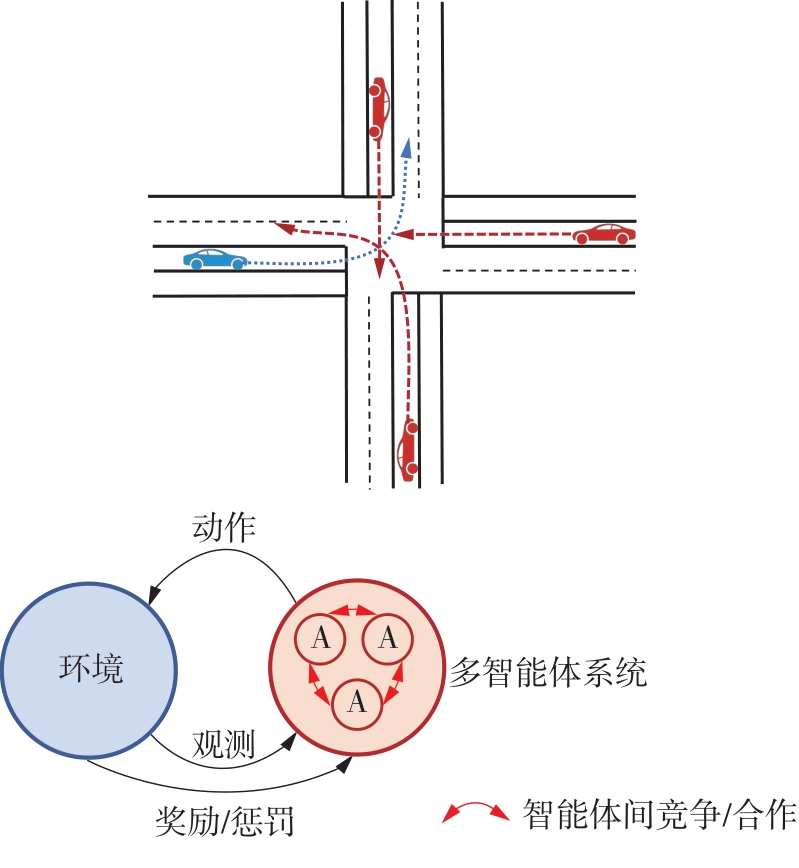
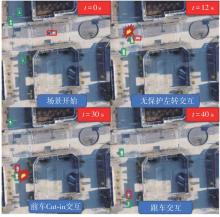
Fig.8
Rendering of a generated interactive scenario in a real-world setting"
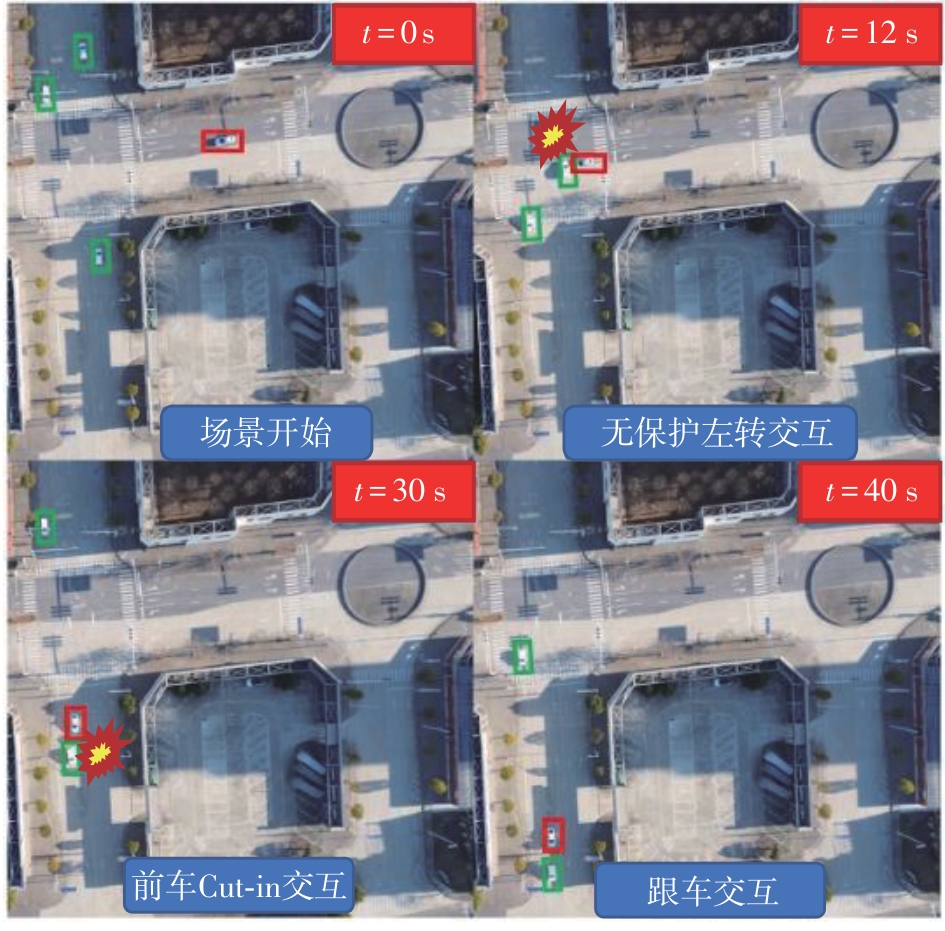
Table 3
Quantitative comparison of representative adversarial-based generation approaches"
| 典型方法 | 对抗性 | 效率 | 多样性 |
|---|---|---|---|
| 利用强化学习保持交通参与者行为自然且具有对抗性[ | CR达每400 m0.046次 | 测试约加速6 000倍;节约里程约5 632.7万km | 全面无偏地生成美国FARS标准的5种高速公路事故场景 |
| 通过深度强化学习驱动交通参与者最大化碰撞概率[ | CR达0.286TTC < 1 sBBD < 5 m | 无 | 覆盖美国FARS标准的5种高速公路事故场景中的4个 |
| 设计多智能体强化学习合作与竞争机制[ | CR达90.6% | 100次训练即可生成有效的对抗策略 | 无 |
| 采用自回归生成交通场景模块[ | CR达89% | 200次迭代即可稳定生成场景 | 场景类型覆盖多种风险场景(如左转、右转、闯红灯等) |
| 在扩散模型去噪过程中引入多步对抗优化[ | CR达0.58IR达0.61 | 无 | 无 |
| 基于扩散模型优化对抗的目标函数[ | CR达0.64IR达0.69 | 无 | 无 |

Fig.9
Rendering of a scene generated by a diffusion model"
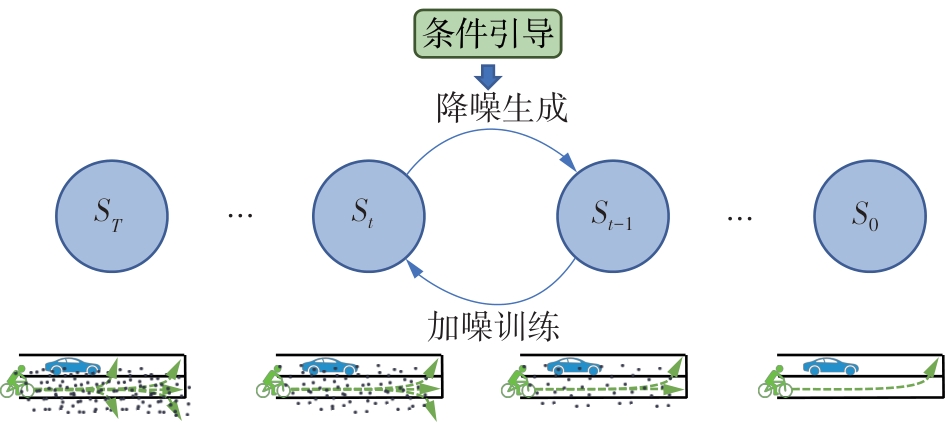
Table 4
Quantitative comparison of representative knowledge-based generation approaches"
| 典型方法 | 真实性 | 可控性 |
|---|---|---|
| 通过知识驱动本体建模并利用强化学习提取特征[ | dmin:0.69~2.9 m vd:20.38~22.1 m/s | 按需生成4类指定逻辑场景 |
| 扩散模型的去噪过程中结合行为先验知识[ | 虚拟现实得分达0.720 minADE达1.474 | 引导后CR从2.47%降低到1.11% |
| 将显式知识整合到树结构变分自编码器模型生成场景[ | 规则违反率 < 5% | 重建误差达0.21 |
Table 5
Quantitative comparison of representative LLM application approaches"
| 典型方法 | 真实性 | 对抗性 | 多样性 | 可控性 | 效率 |
|---|---|---|---|---|---|
| 利用LLM结合Transformer解码器架构[ | mADE达1.329;MMD最优达0.061 6;mFDE达2.838 | CR最优达52.35% | 场景多样性达0.76 | 人类评估中偏好率超90%;评分最高达4.3 | 无 |
| 通过对比学习训练自编码器提取行为嵌入[ | mADE达1.54;mFDE达1.21 | CR最优达59% | 无 | 人类评估中偏好率100%;评分最高达4.27 | 无 |
| 联合LLM与扩散模型生成语义地图及动态轨迹[ | mADE达2.59;mFDE达3.64 | CR最优达39% | 场景多样性达0.93 | 无 | 生成1 000个边缘案例需0.75图形计算单元运行小时数 |
| 利用用户指令设计条件扩散模型损失函数[ | mADE达1.73;mFDE达4.02 | 无 | 无 | 规则违反率<0.052 | 每个场景1 min |
| 通过链式推理机制将复杂场景分解为层次化事件结构[ | mADE达1.17;mFDE达1.93 | 无 | 无 | 生成成功率85%~95% | 无 |
| 利用上下文将自然语言映射为Carla环境的配置文件[ | ADE最优达0.033;FDE最优达0.058 | 无 | 无 | 无 | 每个场景28.8 s |
| 通过RAG技术优化道路结构生成[ | 无 | 自动驾驶汽车路线完成率为0.42;自动驾驶汽车驾驶得分为40.22;自动驾驶汽车成功率为0.50 | 无 | 生成成功率70%~80% | 每个场景67.90 s |
| 设计多模态生成系统整合文本、图像与视频输入[ | 与真实场景整体相似度高达93%左右 | 自动驾驶汽车路线完成率为0.86;自动驾驶汽车驾驶得分为65.24;自动驾驶汽车成功率为0.76 | 车辆航向角标准差达69.77 | 最优生成成功率达87% | 无 |
| 利用VLM解析事故草图与文本,提取车辆轨迹与碰撞语义[ | 初始位置准确率从小于0.2提升至大于0.6 | CR最优达92% | 无 | 150个真实美国国家交通安全管理局(NHTSA)样本成功率92% | 无 |
| 设计LLM多智能体攻击框架[ | 与真实车辆加速度相对熵达0.011 2;异常急动率达1.836% | 攻击成功率达50.83% | 无 | 无 | 每个场景0.263 s |

Fig.10
Schematic diagram of the RAG workflow"
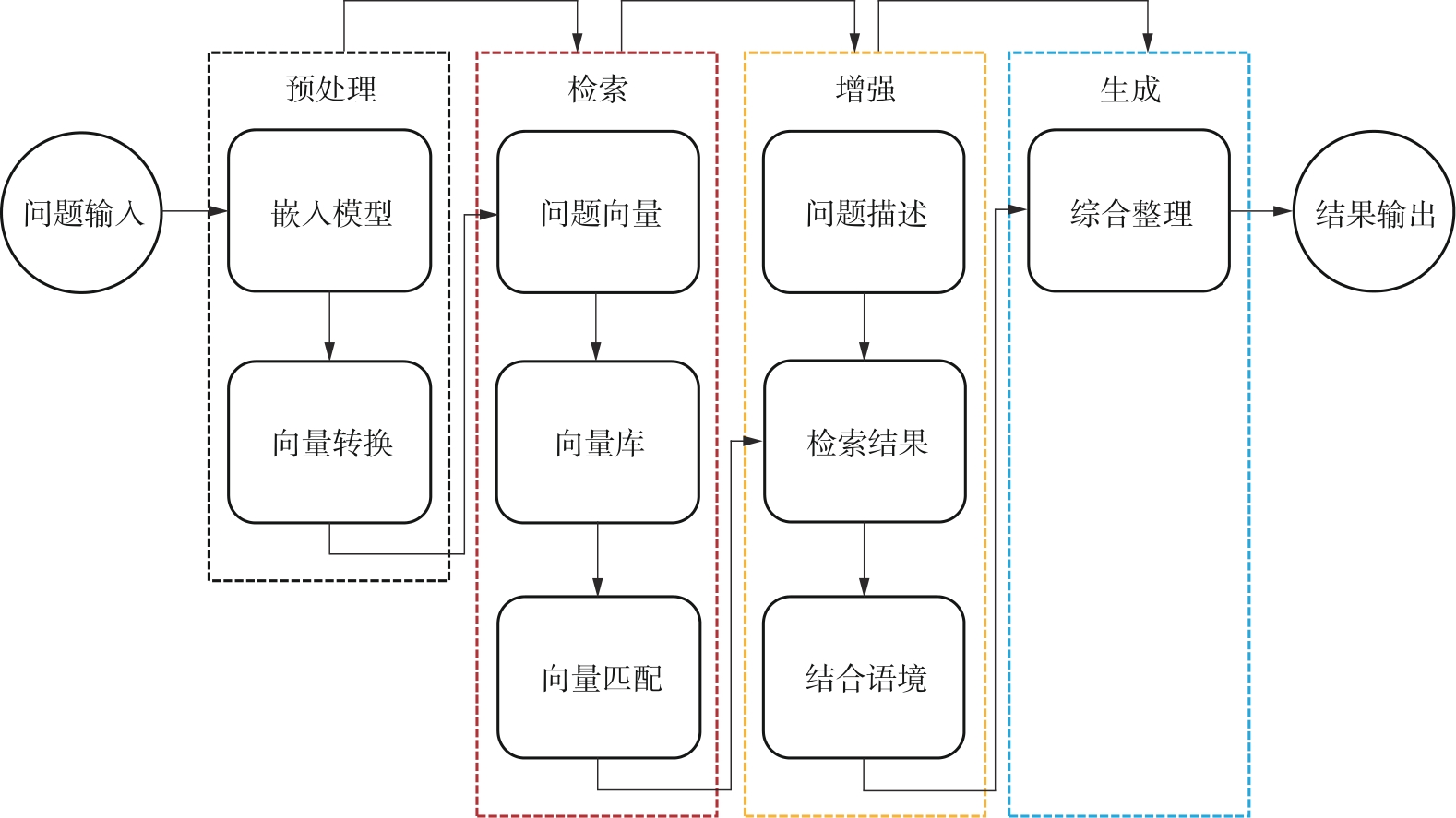

Fig.11
Schematic diagram of the fine-tuning process"
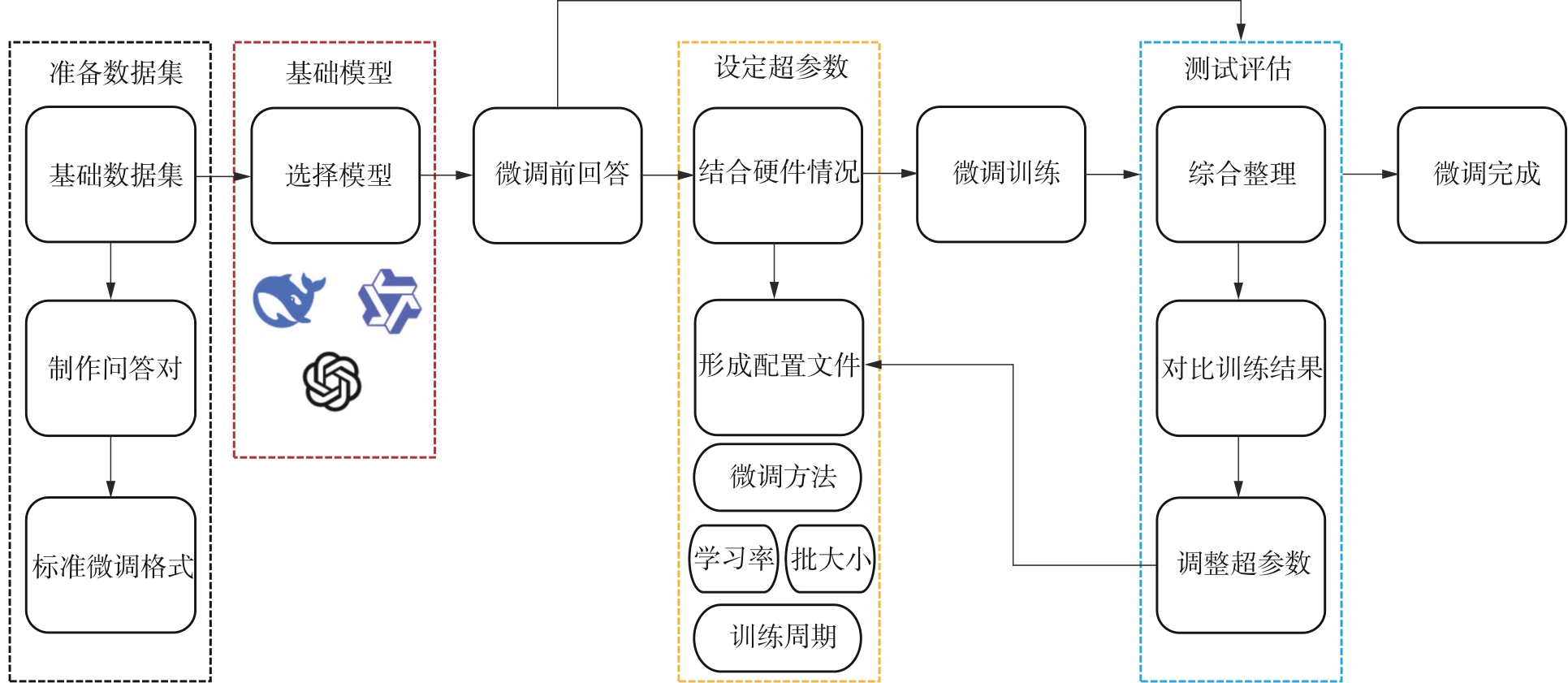
Table 6
Quantitative comparison of representative LLM alignment approaches"
| 典型方法 | 对齐前 | 对齐后 |
|---|---|---|
| 利用Prompt多轮对话提高场景生成成功率[ | 累计成功率为37.5% | 累计成功率为50% |
| 利用RAG提升生成轨迹真实性[ | mADE达13.1;mFDE达14.1 | mADE达1.54;mFDE达1.21 |
| 利用微调提升模型对场景的理解[ | 场景描述得分为0.49 | 场景描述得分为0.71 |
Table 7
Analysis of problem-cause-solution"
| 维度 | 典型问题 | 主要原因 | 可行对策 |
|---|---|---|---|
| 交互数据集 | 关键词与轨迹数据缺失;长尾交互场景稀缺;地域适应性不足 | 以功能验证为导向的数据采集策略;跨模态数据对齐困难;行人与非机动车分布失衡;制度与环境差异 | 构建多模态强语义数据集;发展自动化标注与轨迹提取技术;建立统一标签标准与数据共享机制;利用高保真合成技术补充长尾场景;实现已知与未知场景的自动识别 |
| 交互场景描述 | 交互度量缺乏可比性;标准与规范描述分散;评估指标单一 | 不同研究口径不一致;测试工具与标准脱节;多范式测试需求未形成闭环 | 建立统一的严重性基准与分级体系;面向规范语言实现快速场景生成与场景库构建;设计融合安全、效率与博弈的多维综合评价指标;通过仿真、场地与实车测试约束可测性 |
| 传统学习生成方法 | 真实性与多样性难以兼顾;关键场景生成效率低;虚实差距难以量化;生成过程可控性不足 | 数据偏差与模式坍塌问题;高维稀有事件搜索困难;多源差异叠加效应;缺乏可控与可微分接口 | 采用因子化分层组合生成方法;引入风险敏感搜索与课程学习机制;通过域随机化、系统辨识与因果对齐缩小虚实差距;发展可控生成与仿真技术;推动多范式方法融合 |
| 大语言模型方法 | 推理速度慢;计算成本高;知识更新滞后与生成幻觉问题;黑盒机制解释性差 | 上下文推理负担重;缺乏可靠外部知识接入机制;缺少程序化验证环节 | 应用量化、剪枝、稀疏化与参数高效微调技术;引入检索增强生成与知识图谱结合机制;推进程序化与可验证生成及工具调用能力;建设行业知识图谱与向量数据库;采用硬件加速与流水线并行策略 |
| [1] | 陈吉清,舒孝雄,兰凤崇,等 .典型危险事故特征的自动驾驶测试场景构建[J].华南理工大学学报(自然科学版),2021,49(5):1-8. |
| CHEN Jiqing, SHU Xiaoxiong, LAN Fengchong,et al .Construction of autonomous vehicles test scenarios with typical dangerous accident characteristics[J].Journal of South China University of Technology (Natural Science Edition),2021,49(5):1-8. | |
| [2] | 武彪,任洪泽,郑联庆,等 .基于自然驾驶行为的智能驾驶复杂场景构建方法[J].华南理工大学学报(自然科学版),2025,53(2):38-47. |
| WU Biao, REN Hongze, ZHENG Lianqing,et al .Com-plex scenario construction method for navigation pil ot based on natural driving behaviour[J].Journal of South China University of Technology (Natural Science Edition),2025,53(2):38-47. | |
| [3] | BROWN T, MANN B, RYDER N,et al .Language models are few-shot learners[J].Advances in Neural Information Processing Systems,2020,33:1877-1901. |
| [4] | WEI J, WANG X, SCHUURMANS D,et al .Chain-of-thought prompting elicits reasoning in large language models[J].Advances in Neural Information Processing Systems,2022,35:24824-24837. |
| [5] | LEWIS P, PEREZ E, PIKTUS A,et al .Retrieval-augmented generation for knowledge-intensive NLP tasks[J].Advances in Neural Information Processing Systems,2020,33:9459-9474. |
| [6] | HU E J, SHEN Y, WALLIS P,et al .Lora: low-rank adaptation of large language models[J].arXiv preprint arXiv: 2106.09685v2,2021. |
| [7] | PUNZO V, BORZACCHIELLO M T, CIUFFO B .On the assessment of vehicle trajectory data accuracy and application to the next generation simulation (NGSIM) program data[J].Transportation Research Part C:Emer-ging Technologies,2011,19(6):1243-1262. |
| [8] | GEIGER A, LENZ P, URTASUN R .Are we ready for autonomous driving?the kitti vision benchmark suite[C]∥Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition.Providence:IEEE,2012,3354-3361 |
| [9] | BINAS J, NEIL D, LIU S C,et al .DDD17:End-to-end DAVIS driving dataset[J].arXiv preprint arXiv:,2017. |
| [10] | KRAJEWSKI R, BOCK J, KLOEKER L,et al .The highd dataset:a drone dataset of naturalistic vehicle trajectories on german highways for validation of highly automated driving systems[C]∥Proceedings of the 21st International Conference on Intelligent Transportation Systems (ITSC).Maui:IEEE,2018:2118-2125. |
| [11] | RAMANISHKA V, CHEN Y T, MISU T,et al .Toward driving scene understanding: a dataset for learning driver behavior and causal reasoning[C]∥Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition.Salt Lake City:IEEE,2018:7699-7707. |
| [12] | YU F, CHEN H, WANG X,et al .Bdd100k:a diverse driving dataset for heterogeneous multitask learning[C]∥Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition.Seattle: IEEE, 2020: 2636-2645. |
| [13] | HUANG X, WANG P, CHENG X .The apolloscape open dataset for autonomous driving and its application[C]∥Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops (CVPRW).Salt Lake City:IEEE,2018:1067-1073. |
| [14] | HOUSTON J, ZUIDHOF G, BERGAMINI L, et al .One thousand and one hours: self-driving motion prediction dataset[C]∥Proceedings of the Conference on Robot Learning.Cambridge:PMLR,2021: 409-418. |
| [15] | CHANG M F, LAMBERT J, SANGKLOY P, et al .Argoverse: 3D tracking and forecasting with rich maps[C]∥Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition.Long Beach: IEEE,2019: 8748-8757. |
| [16] | ZHAN W, SUN L, WANG D,et al .Interaction dataset:an international, adversarial and cooperative motion dataset in interactive driving scenarios with semantic maps[J].arXiv preprint arXiv:,2019. |
| [17] | RASOULI A, KOTSERUBA I, KUNIC T, et al .Pie: a large-scale dataset and models for pedestrian intention estimation and trajectory prediction[C]∥Proceedings of the IEEE/CVF International Conference on Computer Vision (ICCV).Seoul:IEEE,2019 6262-6271. |
| [18] | PATIL A, MALLA S, GANG H, et al .The H3D dataset for full-surround 3D multi-object detection and tracking in crowded urban scenes[C]∥Proceedings of the IEEE/CVF International Conference on Robotics and Automation (ICRA).Montreal:IEEE,2019 9552-9557. |
| [19] | IZQUIERDO R, QUINTANAR A, PARRA I, et al .The prevention dataset: a novel benchmark for prediction of vehicles intentions[C]∥Proceedings of the IEEE Intelligent Transportation Systems Conference (ITSC).Auckland: IEEE, 2019: 3114-3121. |
| [20] | PHAM Q H, SEVESTRE P, PAHWA R S, et al .A* 3D dataset: towards autonomous driving in challenging environments[C]∥Proceedings of the IEEE International Conference on Robotics and Automation (ICRA).Paris: IEEE, 2020: 2267-2273. |
| [21] | YANG G, SONG X, HUANG C,et al .Drivingstereo:a large-scale dataset for stereo matching in autonomous driving scenarios[C]∥Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition.Long Beach:IEEE,2019:899-908. |
| [22] | MALLA S, DARIUSH B, CHOI C .Titan: future forecast using action priors[C]∥Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition.Seattle: IEEE, 2020: 11186-11196. |
| [23] | BOCK J, KRAJEWSKI R, MOERS T, et al .The ind dataset: a drone dataset of naturalistic road user trajectories at german intersections[C]∥Proceedings of the IEEE Intelligent Vehicles Symposium (Ⅳ).Las Vegas: IEEE, 2020: 1929-1934. |
| [24] | KRAJEWSKI R, MOERS T, BOCK J, et al .The round dataset: a drone dataset of road user trajectories at roundabouts in germany[C]∥Proceedings of the IEEE 23rd International Conference on Intelligent Transportation Systems (ITSC).Rhodes:IEEE,2020:1-6. |
| [25] | AGARWAL S, VORA A, PANDEY G, et al .Ford multi-AV seasonal dataset[J].The International Journal of Robotics Research,2020,39(12):1367-1376. |
| [26] | BAO W, YU Q, KONG Y .Uncertainty-based traffic accident anticipation with spatio-temporal relational learning[C]∥Proceedings of the 28th ACM International Conference on Multimedia.Seattle:ACM,2020:2682-2690. |
| [27] | CAESAR H, BANKITI V, LANG A H, et al .Nuscenes: a multimodal dataset for autonomous driving[C]∥Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition.Seattle:IEEE, 2020: 11621-11631. |
| [28] | KOTSERUBA I, RASOULI A, TSOTSOS J K .Joint attention in autonomous driving (JAAD)[J].arXiv preprint arXiv:, 2016. |
| [29] | YAO Y, WANG X, XU M, et al .When,where,and what? a new dataset for anomaly detection in driving videos[J].arXiv preprint arXiv:,2020. |
| [30] | LI S, QIAN Y, ZENG J, et al .Analysis of the impact of large vehicles in merging areas based on driver characteristics under vehicle-road coordination[J].Physica A: Statistical Mechanics and its Applications, 2025, 665: 130497/1-18. |
| [31] | MOERS T, VATER L, KRAJEWSKI R, et al .The exiD dataset: a real-world trajectory dataset of highly interactive highway scenarios in Germany[C]∥Proceedings of the 2022 IEEE Intelligent Vehicles Symposium (Ⅳ).Aachen: IEEE, 2022: 958-964. |
| [32] | LEVELXDATA .The unid dataset [EB/OL].(2021-05-06) [2025-06-01].. |
| [33] | YOGAMANI S, HUGHES C, HORGAN J, et al .Woodscape: a multi-task, multi-camera fisheye dataset for autonomous driving[C]∥Proceedings of the IEEE/CVF International Conference on Computer Vision.Seoul:IEEE,2019:9308-9318. |
| [34] | WILSON B, QI W, AGARWAL T,et al .Argoverse 2:next generation datasets for self-driving perception and forecasting[J].arXiv preprint arXiv:,2023. |
| [35] | SUN P, KRETZSCHMAR H, DOTIWALLA X,et al .Scalability in perception for autonomous driving:Waymo open dataset[C]∥Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition.Seattle:IEEE,2020:2446-2454. |
| [36] | CAESAR H, KABZAN J, TAN K S,et al .nuPlan:a closed-loop ML-based planning benchmark for autonomous vehicles[J].arXiv preprint arXiv:,2021. |
| [37] | SINGH G, AKRIGG S, DI MAIO M,et al .Road:the road event awareness dataset for autonomous driving[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,2022,45(1):1036-1054. |
| [38] | MAO J, NIU M, JIANG C,et al .One million scenes for autonomous driving:ONCE dataset[J].arXiv preprint arXiv:,2021. |
| [39] | ZHENG O, ABDEL-ATY M, YUE L,et al .CitySim:a drone-based vehicle trajectory dataset for safety-oriented research and digital twins[J].Transportation Research Record,2024,2678(4):606-621. |
| [40] | ZHANG Q, PENG Z, ZHOU B .Learning to drive by watching youtube videos:action-conditioned contrastive policy pretraining[C]∥Proceedings of the European Conference on Computer Vision.Tel Aviv:Springer Nature Switzerland,2022:111-128. |
| [41] | MALLA S, CHOI C, DWIVEDI I,et al .Drama:joint risk localization and captioning in driving[C]∥Proceedings of the IEEE/CVF Winter Conference on Applications of Computer Vision.Waikoloa:IEEE,2023:1043-1052. |
| [42] | YU H, LUO Y, SHU M, et al .Dair-v2x: a large-scale dataset for vehicle-infrastructure cooperative 3D object detection[C]∥Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition.New Orleans: IEEE, 2022: 21361-21370. |
| [43] | CREβ C, ZIMMER W, STRAND L, et al .A9-dataset: multi-sensor infrastructure-based dataset for mobility research[C]∥Proceedings of the IEEE Intelligent Vehicles Symposium (Ⅳ).Aachen: IEEE,2022: 965-970. |
| [44] | GRESSENBUCH L, ESTERLE K, KESSLER T, et al .Mona: the munich motion dataset of natural driving[C]∥Proceedings of the IEEE 25th International Conference on Intelligent Transportation Systems (ITSC).Macau: IEEE, 2022: 2093-2100. |
| [45] | XU Y, SHAO W, LI J, et al .SIND: a drone dataset at signalized intersection in china[C]∥Procee-dings of the IEEE 25th International Conference on Intelligent Transportation Systems (ITSC).Macau:IEEE,2022: 2471-2478. |
| [46] | GENG M, LI J, XIA Y, et al .A physics-informed transformer model for vehicle trajectory prediction on highways[J].Transportation Research Part C:Emer-ging Technologies, 2023, 154: 104272/1-28. |
| [47] | AGARWAL N, CHEN Y T .Ordered atomic activity for fine-grained interactive traffic scenario understanding[C]∥Proceedings of the IEEE/CVF International Conference on Computer Vision.Paris: IEEE, 2023:8590-8602. |
| [48] | ZIMMER W, CREβ C, NGUYEN H T, et al .TUMTraf intersection dataset: all you need for urban 3D camera-lidar roadside perception[C]∥Proceedings of the IEEE 26th International Conference on Intelligent Transportation Systems (ITSC).Bilbao:IEEE,2023:1030-1037. |
| [49] | WANG J, FU T, SHANGGUAN Q .Wide-area vehicle trajectory data based on advanced tracking and trajectory splicing technologies: potentials in transportation research[J].Accident Analysis & Prevention,2023, 186: 107044/1-7. |
| [50] | CREβ C, ZIMMER W, PURSCHKE N, et al .TUMTraf event: calibration and fusion resulting in a dataset for roadside event-based and RGB cameras[J].IEEE Transactions on Intelligent Vehicles,2024,9(7): 5186-5203. |
| [51] | ZIMMER W, WARDANA G A, SRITHARAN S,et al .TUMTraf v2x cooperative perception dataset[C]∥Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition.Seattle:IEEE,2024: 22668-22677. |
| [52] | JIANG X, ZHAO X, LIU Y, et al .InterHub: a naturalistic trajectory dataset with dense interaction for autonomous driving[J].arXiv preprint arXiv: 2411.18302, 2024. |
| [53] | WANG Y, CHENG K, HE J, et al .DrivingDojo dataset:advancing interactive and knowledge-enriched driving world model[J].Advances in Neural Information Processing Systems, 2024, 37: 13020-13034. |
| [54] | ZHU J, WANG W, ZHAO D .A tempt to unify he-terogeneous driving databases using traffic primitives[C]∥Proceedings of the IEEE 21st International Conference on Intelligent Transportation Systems (ITSC).Maui: IEEE, 2018: 2052-2057. |
| [55] | ZHOU H, MA K, LIANG S, et al .ULTra-AV: a unified longitudinal trajectory dataset for automated vehicle[J].arXiv preprint arXiv:, 2024. |
| [56] | ZHOU X, LIN Z, SHAN X, et al .DrivingGaussian:composite gaussian splatting for surrounding dynamic autonomous driving scenes[C]∥Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition.Seattle:IEEE,2024:21634-21643. |
| [57] | 2022 Road vehicles—test scenarios for automated dri-ving systems—scenario-based safety evaluation framework: [S]. |
| [58] | 2024 Road vehicles—test scenarios for automated dri-ving systems—scenario categorization: [S]. |
| [59] | United Nations Economic Commission For Europe .New assessment/test method for automated driving (NATM) guidelines for validating automated driving system (ADS)-amendments to ECE/TRANS/WP.29/2022/58 [R].Geneva: UNECE, 2022. |
| [60] | Standard for functional requirements of data for autonomous driving system testing:IEEE P3344 [S]. |
| [61] | Japan Automobile Manufacturers Association,Inc .Automated driving safety evaluation framework Ver 3.0 [R].Tokyo: Japan Automobile Manufacturers Association, Inc., 2022. |
| [62] | 交通参与者行为理解与轨迹预测的评测方法及数据集构建标准:T/CAABZ2022002 [S]. |
| [63] | 智能网联汽车 自动驾驶功能场地试验方法及要求: [S]. |
| [64] | BERGER C, RUMPE B .Engineering autonomous driving software[M]∥Proceedings of the Experience from the DARPA Urban Challenge.London:Springer,2012: 243-271. |
| [65] | ALTHOFF M, KOSCHI M, MANZINGER S .CommonRoad: composable benchmarks for motion planning on roads[C]∥Proceedings of the 2017 IEEE Intelligent Vehicles Symposium (Ⅳ).Los Angeles:IEEE,2017:719-726. |
| [66] | BOCK F, SIPPL C, HEINZ A, et al .Advantageous usage of textual domain-specific languages for scenario-driven development of automated driving functions[C]∥Proceedings of the IEEE International Systems Conference (SysCon).Orlando:IEEE,2019:1-8. |
| [67] | QUEIROZ R, BERGER T, CZARNECKI K .GeoScenario:an open DSL for autonomous driving scenario representation[C]∥Proceedings of the IEEE Intelligent Vehicles Symposium (Ⅳ).Paris:IEEE,2019:287-294. |
| [68] | Foretellix,Inc .Measurable scenario description language[EB/OL].(2021-05-06) [2025-06-01].. |
| [69] | FREMONT D J, KIM E, DREOSSI T,et al .Scenic:a language for scenario specification and data generation[J].Machine Learning,2023,112(10):3805-3849. |
| [70] | ZHANG X, KHASTGIR S, JENNINGS P .Scenario description language for automated driving systems: a two level abstraction approach[C]∥Proceedings of the 2020 IEEE International Conference on Systems,Man,and Cybernetics (SMC).Toronto:IEEE,2020:973-980. |
| [71] | SCHÜTT B, BRAUN T, OTTEN S, et al .SceML: a graphical modeling framework for scenario-based testing of autonomous vehicles[C]∥Proceedings of the 23rd ACM/IEEE International Conference on Model Driven Engineering Languages and Systems.Montreal: ACM, 2020: 114-120. |
| [72] | ASAM.Openscenario[EB/OL].(2021-05-09)[2025-06-01].. |
| [73] | ZHOU Y, SUN Y, TANG Y,et al .Avunit[EB/OL].(2021-05-13)[2025-06-01].. |
| [74] | CHEN B, LI T F .Formal modeling and verification of autonomous driving scenario[C]∥Proceedings of the 2021 IEEE International Conference on Information Communication and Software Engineering (ICICSE).Chongqing: IEEE, 2021: 313-321. |
| [75] | HARDER A, RANJIT J, BEHL M .Scenario2Vector: scenario description language based embeddings for traffic situations[C]∥Proceedings of the ACM/IEEE 12th International Conference on Cyber-Physical Systems.Nashville: ACM, 2021: 167-176. |
| [76] | LI B, DU D, CHEN S, et al .SML4ADS: an open DSML for autonomous driving scenario representation and generation[C]∥Proceedings of the 37th IEEE/ACM International Conference on Automated Software Engineering.Rochester: IEEE, 2022: 1-3. |
| [77] | KANG S, GUO H, SU P, et al .Ecsas: exploring critical scenarios from action sequence in autonomous driving[C]∥Proceedings of the IEEE 32nd Asian Test Symposium (ATS).Beijing: IEEE, 2023: 1-6. |
| [78] | LI Q, PENG Z M, FENG L, et al .Scenarionet: open-source platform for large-scale traffic scenario simulation and modeling[J].Advances in Neural Information Processing Systems,2023,36:3894-3920. |
| [79] | AOKI T, TOMITA T, KAWAI T, et al .Modeling language for scenario development of autonomous driving systems[J].arXiv preprint arXiv:,2025. |
| [80] | 凡海金,王润民,张心睿,等 .无信号交叉口网联车辆协同碰撞预警研究进展[J].汽车技术,2024(3):1-16. |
| FAN Haijin, WANG Runmin, ZHANG Xinrui,et al .Research progress of cooperative collision warning of connected vehicles at unsignalized intersections[J].Au tomobile Technology,2024(3),1-16. | |
| [81] | DING W, XU C, ARIEF M, et al .A survey on safety-critical driving scenario generation—a metho-dological perspective[J].IEEE Transactions on Intelligent Transportation Systems, 2023, 24(7): 6971-6988. |
| [82] | KAR A, PRAKASH A, LIU M Y,et al .Meta-Sim:learning to generate synthetic datasets[C]∥Procee-dings of the IEEE/CVF International Conference on Computer Vision.Seoul:IEEE,2019:4551-4560. |
| [83] | TAN S, WONG K, WANG S, et al .SceneGen:learning to generate realistic traffic scenes[C]∥Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition.Nashville:IEEE,2021: 892-901. |
| [84] | SUO S, REGALADO S, CASAS S,et al .TrafficSim:learning to simulate realistic multi-agent behaviors[C]∥Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition.Nashville:IEEE,2021:10395-10404. |
| [85] | CHEN J, YUAN B, TOMIZUKA M .Deep imitation learning for autonomous driving in generic urban scenarios with enhanced safety[C]∥Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS).Macau:IEEE,2019:2884-2890. |
| [86] | DEVARANJAN J, KAR A, FIDLER S .Meta-Sim2:unsupervised learning of scene structure for synthetic data generation[C]∥Proceedings of the European Conference on Computer Vision.Glasgow:Springer International Publishing, 2020: 715-733. |
| [87] | ZHONG Z, REMPE D, XU D, et al .Guided conditional diffusion for controllable traffic simulation[C]∥Proceedings of the IEEE International Conference on Robotics and Automation (ICRA).London:IEEE,2023: 3560-3566. |
| [88] | SUN S, GU Z, SUN T, et al .DriveSceneGen:generating diverse and realistic driving scenarios from scratch[J].IEEE Robotics and Automation Letters,2024, 9(5): 4552-4559. |
| [89] | YANG C, HE Y, TIAN A X, et al .WcDT:world-centric diffusion transformer for traffic scene generation[J].arXiv preprint arXiv:, 2024. |
| [90] | DING W, XU M, ZHAO D .Cmts: a conditional multiple trajectory synthesizer for generating safety-critical driving scenarios[C]∥Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA).Paris:IEEE, 2020: 4314-4321. |
| [91] | KUUTTI S, FALLAH S, BOWDEN R .Training adversarial agents to exploit weaknesses in deep control policies[C]∥Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA).Paris: IEEE, 2020: 108-114. |
| [92] | FENG S, YAN X, SUN H, et al .Intelligent dri-ving intelligence test for autonomous vehicles with naturalistic and adversarial environment[J].Nature Communications, 2021, 12(1): 748/1-14. |
| [93] | SUN H, FENG S, YAN X, et al .Corner case generation and analysis for safety assessment of autonomous vehicles[J].Transportation Research Record,2021,2675(11): 587-600. |
| [94] | MA Y, JIANG W, ZHANG L, et al .Evolving testing scenario generation method and intelligence evaluation framework for automated vehicles[J].arXiv preprint arXiv:,2023. |
| [95] | WACHI A .Failure-scenario maker for rule-based agent using multi-agent adversarial reinforcement learning and its application to autonomous driving[J].arXiv preprint arXiv:,2019. |
| [96] | CHEN B, CHEN X, WU Q, et al .Adversarial evaluation of autonomous vehicles in lane-change scenarios[J].IEEE Transactions on Intelligent Transportation Systems, 2021, 23(8): 10333-10342. |
| [97] | HAO K, CUI W, LUO Y, et al .Adversarial safety-critical scenario generation using naturalistic human driving priors[J].IEEE Transactions on Intelligent Vehicles, 2023, 9(1): 2788-2800. |
| [98] | DING W, CHEN B, XU M, et al .Learning to collide: an adaptive safety-critical scenarios generating method[C]∥Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS).Las Vegas: IEEE, 2020: 2243-2250. |
| [99] | XU C, PETIUSHKO A, ZHAO D, et al .Diffscene: diffusion-based safety-critical scenario generation for autonomous vehicles[C]∥Proceedings of the Thirty-Ninth AAAI Conference on Artificial Intelligence.Philadelphia:AAAI Press,2025:8797-8805. |
| [100] | LU J, AZAM S, ALCAN G, et al .Data-driven diffusion models for enhancing safety in autonomous vehicle traffic simulations[J].arXiv preprint arXiv:, 2024. |
| [101] | SHIROSHITA S, MARUYAMA S, NISHIYAMA D,et al .Behaviorally diverse traffic simulation via reinforcement learning[C]∥Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS).Las Vegas:IEEE,2020:2103-2110. |
| [102] | RANA A, MALHI A .Building safer autonomous agents by leveraging risky driving behavior knowledge[C]∥Proceedings of the International Conference on Communications, Computing, Cybersecurity, and Informatics (CCCI).Beijing: IEEE, 2021: 1-6. |
| [103] | HAO K, LIU L, CUI W, et al .Bridge Gen:Bridging data-driven and knowledge-driven approaches for safety-critical scenario generation in automated vehicle validation[J].arXiv preprint arXiv:,2023. |
| [104] | HUANG Z, ZHANG Z, VAIDYA A, et al .Versatile behavior diffusion for generalized traffic agent simulation[J].arXiv preprint arXiv:,2024. |
| [105] | DING W, LIN H, LI B, et al .Generalizing goal-conditioned reinforcement learning with variational causal reasoning[J].Advances in Neural Information Processing Systems, 2022, 35: 26532-26548. |
| [106] | DING W, LIN H, LI B, et al .CausalAF:causal autoregressive flow for safety-critical driving scenario generation[C]∥Proceedings of the Conference on Robot Learning.Atlanta: PMLR, 2023: 812-823. |
| [107] | DING W, LIN H, LI B, et al .Semantically adversarial scene generation with explicit knowledge guidance[J].IEEE Transactions on Intelligent Transportation Systems, 2025, 26(2): 1510-1521. |
| [108] | TAN S, IVANOVIC B, WENG X, et al .Language conditioned traffic generation[J].arXiv preprint arXiv:, 2023. |
| [109] | LI S, AZFAR T, KE R .ChatSUMO:Large language model for automating traffic scenario generation in simulation of urban mobility[J].IEEE Transactions on Intelligent Vehicles,2024,9(1):2801-2810. |
| [110] | AIERSILAN A .Generating traffics scenarios via in-context learning to learn better motion planner[C]∥Proceedings of the Thirty-Ninth AAAI Conference on Artificial Intelligence.Philadelphia:AAAI Press,2025:14539-14547. |
| [111] | MICELI-BARONE A V, LASCARIDES A, INNES C. Dialogue-based generation of self-driving simulation scenarios using large language models[J].arXiv preprint arXiv:, 2023. |
| [112] | CHANG C, WANG S, ZHANG J, et al .LLMScenario: large language model driven scenario generation[J].IEEE Transactions on Systems,Man,and Cybernetics:Systems,2024,54(11):6581-6594. |
| [113] | XU W, PEI H, YANG J, et al .Exploring critical testing scenarios for decision-making policies:an LLM approach[J].arXiv preprint arXiv:,2024. |
| [114] | DING W, CAO Y, ZHAO D,et al .RealGen:retrieval augmented generation for controllable traffic scenarios[C]∥Proceedings of the European Confe-rence on Computer Vision. Milan:Springer Nature Switzerland, 2024: 93-110. |
| [115] | NGUYEN P, WANG T H, HONG Z W, et al .Text-to-drive: diverse driving behavior synthesis via large language models[C]∥Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS).Abu Dhabi: IEEE,2024:10495-10502. |
| [116] | LU Q, WANG X, JIANG Y,et al .Multimodal large language model driven scenario testing for autonomous vehicles[J].arXiv preprint arXiv:,2024. |
| [117] | ZHONG Z, REMPE D, CHEN Y, et al .Language-guided traffic simulation via scene-level diffusion[C]∥Proceedings of the Conference on Robot Learning.Atlanta: PMLR, 2023: 144-177. |
| [118] | LIU Z, LI L, WANG Y, et al .Controllable traffic simulation through LLM-guided hierarchical reasoning and refinement[C]∥Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems(IROS).Hangzhou:IEEE,2025:6288-6295. |
| [119] | ZHANG S, TIAN J, ZHU Z, et al .DriveGen:towards infinite diverse traffic scenarios with large models[J].arXiv preprint arXiv:, 2025. |
| [120] | HUANG H, CHEN Y, WANG Z, et al .Chat-Scene: bridging 3D scene and large language models with object identifiers[C]∥Proceedings of the Thirty-eighth Annual Conference on Neural Information Processing Systems. Vancouver: NeurIPS Foundation, 2024:113991-114017. |
| [121] | LU Q, MA M, DAI X, et al .Realistic corner case generation for autonomous vehicles with multimodal large language model[J].arXiv preprint arXiv:, 2024. |
| [122] | TIAN X, GU J, LI B,et al .DrivevLM:the convergence of autonomous driving and large vision-language models[J].arXiv preprint arXiv:,2024. |
| [123] | LI M, DING W, LIN H, et al .CrashAgent:crash scenario generation via multi-modal reasoning[J].arXiv preprint arXiv:, 2025. |
| [124] | MEI Y, NIE T, SUN J, et al .LLM-attacker: enhancing closed-loop adversarial scenario generation for autonomous driving with large language models[J].arXiv preprint arXiv:, 2025. |
| [125] | TANG S, ZHANG Z, ZHOU J, et al .Legend: a top-down approach to scenario generation of autonomous driving systems assisted by large language models[C]∥Proceedings of the 39th IEEE/ACM International Conference on Automated Software Engineering.Sacramento: ACM, 2024: 1497-1508. |
| [126] | TIAN H, REDDY K, FENG Y, et al .Enhancing autonomous vehicle training with language model integration and critical scenario generation[J].arXiv preprint arXiv:, 2024. |
| [127] | CUI Y, LIN H, YANG S, et al .Chain-of-thought for autonomous driving: a comprehensive survey and future prospects[J].arXiv preprint arXiv:, 2025. |
| [128] | ZHAO Y, ZHOU J, BI D, et al .A survey on the application of large language models in scenario-based testing of automated driving systems[J].arXiv preprint arXiv:, 2025. |
| [129] | CAI X, BAI X, CUI Z, et al .Text2Scenario:text-driven scenario generation for autonomous driving test[J].arXiv preprint arXiv:, 2025. |
| [1] | DONG Min, LAI Youcheng, BI Sheng. Target Navigation Method Based on Multimodal Scene Memory and Instruction Prompting [J]. Journal of South China University of Technology(Natural Science Edition), 2026, 54(2): 1-15. |
| [2] | TU Xinhui, GUO Cong, ZONG Yuhang. Information Retrieval Re-Ranking Method Based on Bidirectional Text Expansion [J]. Journal of South China University of Technology(Natural Science Edition), 2025, 53(9): 59-67. |
| [3] | . A Study on the Impact Mechanism of Human-Machine Mixed DrivingTraffic Flow Under Occasional Accident [J]. Journal of South China University of Technology(Natural Science Edition), 2025, 53(8): 61-72. |
| [4] | MA Xiaoliang, GAO Jie, LIU Ying, PEI Qingqi, ZHAO Ruqiang, YANG Bangxing, DENG Congjian. Customer Service Knowledge Recommendation Large Model Construction Driven by Intent Understanding [J]. Journal of South China University of Technology(Natural Science Edition), 2025, 53(3): 40-49. |
| [5] | ZHANG Zhiqing, YU Xiaozheng, ZHU Leipeng, SUN Yufeng, LI Yixin. Identifying Key Causes of Accidents for Autonomous Vehicles Based on CTGAN [J]. Journal of South China University of Technology(Natural Science Edition), 2025, 53(10): 14-28. |
| [6] | CHEN Jiqing, SHU Xiaoxiong, LAN Fengchong, et al. Construction of Autonomous Vehicles Test Scenarios with Typical Dangerous Accident Characteristics [J]. Journal of South China University of Technology (Natural Science Edition), 2021, 49(5): 1-8. |
| [7] |
SUN Chuanyang ZHANG Xin XI Lihe CHEN Hongwei .
Design for the Steering Controller of Autonomous
Vehicles at the Limits of Handling
|
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||