Journal of South China University of Technology(Natural Science Edition) ›› 2024, Vol. 52 ›› Issue (6): 34-44.doi: 10.12141/j.issn.1000-565X.230258
• Green & Intelligent Transportation • Previous Articles Next Articles
Trajectory Data-Driven Model for Vehicle Lane Change Intention Recognition
YUAN Renteng1,2 ( ) , WANG Chenzhu1 , XIANG Qiaojun1 () , ZHENG Ou2 , DING Shengxuan2
) , WANG Chenzhu1 , XIANG Qiaojun1 () , ZHENG Ou2 , DING Shengxuan2
- 1.School of Transportation,Southeast University,Nanjing 211189,Jiangsu,China
2.College of Engineering and Computer Science,University of Central Florida,Orlando 32816-2450,America
-
Received:2023-04-21Online:2024-06-25Published:2023-10-19 -
Contact:项乔君(1964—),男,博士,教授,主要从事交通设计和道路交通安全研究。 E-mail:xqj@seu.edu.cn -
About author:苑仁腾(1994—),男,博士生,主要从事驾驶行为及交通安全研究。E-mail:rtengyuan123@126.com -
Supported by:the National Natural Science Foundation of China(52372323);the Postgraduate Research & Practice Innovation Program of Jiangsu Province(KYCX22_0270)
CLC Number:
Cite this article
YUAN Renteng, WANG Chenzhu, XIANG Qiaojun, et al. Trajectory Data-Driven Model for Vehicle Lane Change Intention Recognition[J]. Journal of South China University of Technology(Natural Science Edition), 2024, 52(6): 34-44.
share this article
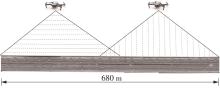
Fig.1
A snapshot of freeway-B segment"


Fig.2
Positions of vehicle points[25]"

Table 1
Indicators of original vehicle trajectory data in CitySim dataset[27]"
| 字段 | 单位 | 说明 |
|---|---|---|
| CarId | 车辆编号,每辆车分别对应唯一的车辆编号 | |
| FrameNum | 数据帧号,每1 s采集30帧数据 | |
| CarCenterX | 像素 | 车辆边界框中心像素点的x坐标值 |
| CarCenterY | 像素 | 车辆边界框中心像素点的y坐标值 |
| BoundingBox1X | 英尺 | 车辆边界框顶点1的x坐标值 |
| BoundingBox1Y | 英尺 | 车辆边界框顶点1的y坐标值 |
| ︙ | ︙ | ︙ |
| BoundingBox4X | 英尺 | 车辆边界框顶点4的x坐标值 |
| BoundingBox4Y | 英尺 | 车辆边界框顶点4的y坐标值 |
| CarCenterLat | (°) | 车辆边界框中心像素点的纬度 |
| CarCenterLon | (°) | 车辆边界框中心像素点的经度 |
| ︙ | ︙ | ︙ |
| LaneId | 车道编号,即车辆当前所处车道编号 |

Fig.3
Structure of causal convolutions with deepness of 3"


Fig.4
Left padding of zeroes for time series"


Fig.5
A dilated causal convolution"
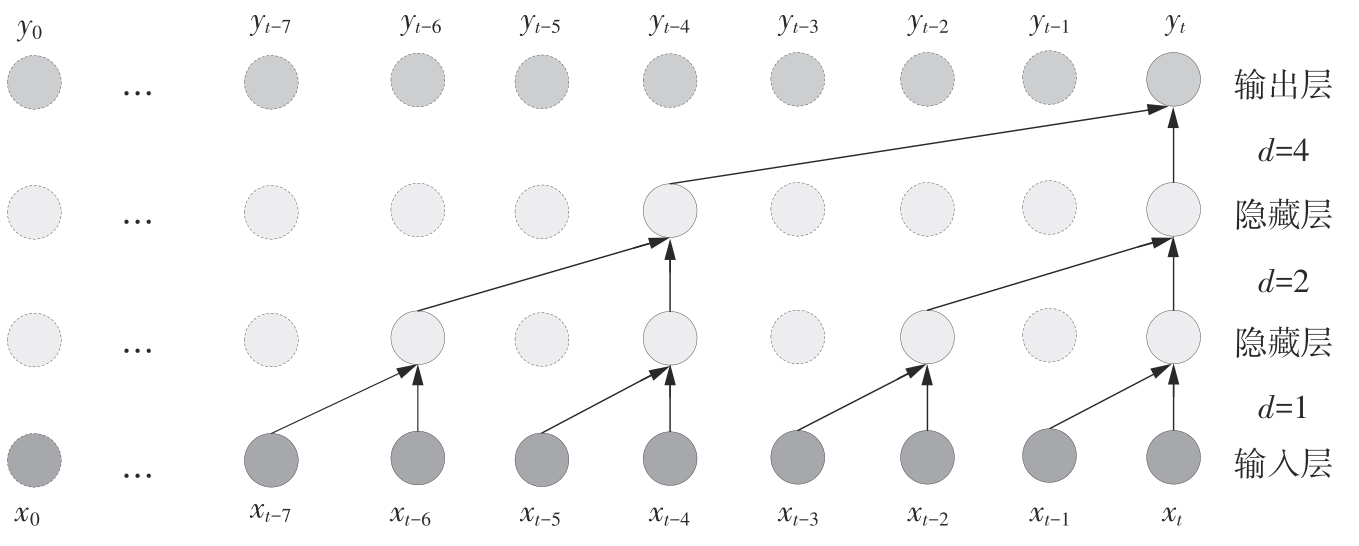

Fig.6
TCN residual block"


Fig.7
Framework of the proposed lane-changing intention recognition model based on TCN-LSTM network"


Fig.8
Comparison of original trajectory and processed trajectory"
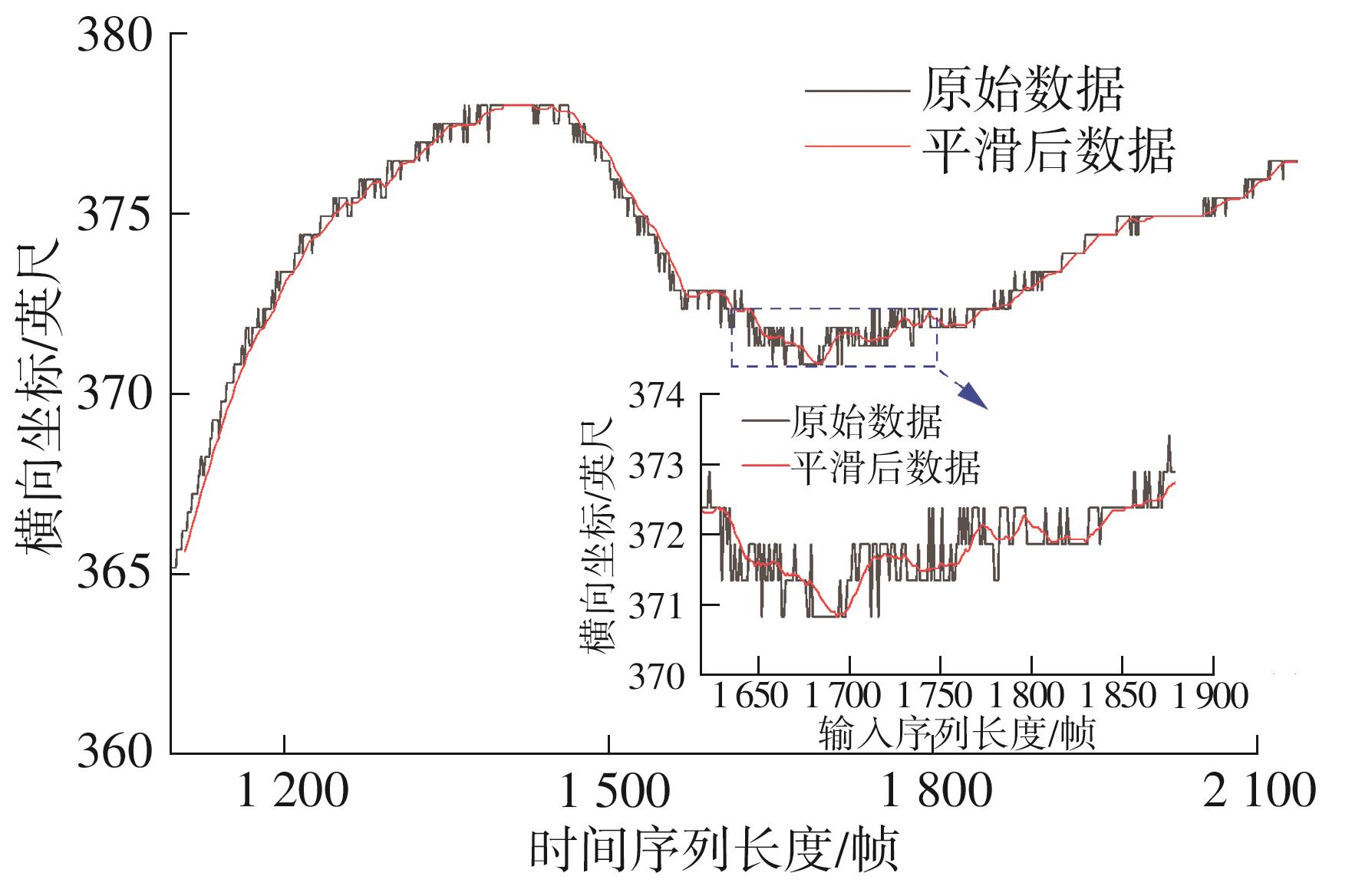
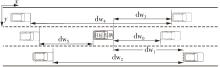
Fig.9
Definition of headway distance between the target vehicle and surrounding vehicles"

Table 2
Input indicators of the model"
| 输入指标 | 变量描述 |
|---|---|
| E-,P-,F-,LP-,LF-,RP-,RF-vx | 目标车辆和周边车辆的纵向速度,km/h |
| E-,P-,F-,LP-,LF-,RP-,RF-vy | 目标车辆和周边车辆的侧向速度,km/h |
| E-,P-,F-,LP-,LF-,RP-,RF-ax | 目标车辆和周边车辆的纵向加速度,m/s2 |
| E-,P-,F-,LP-,LF-,RP-,RF-ay | 目标车辆和周边车辆的侧向加速度,m/s2 |
| E-,P-,F-,LP-,LF -,RP-,RF-θ | 目标车辆和周边车辆的航向角,(°) |
| E-,P-,F-,LP-,LF -,RP-,RF-Δθ | 目标车辆和周边车辆的航向角变化率,(°)/s |
| dw0,dw1,dw2,dw3,dw4,dw5 | 目标车辆和周边车辆的车头间距,m |
| P-,F-,LP-,LF -,RP-,RF-val | 1表示对应车辆轨迹未被记录或不存在,0表示对应车辆轨迹被记录 |

Fig.10
Sample of labeling lane change intention"
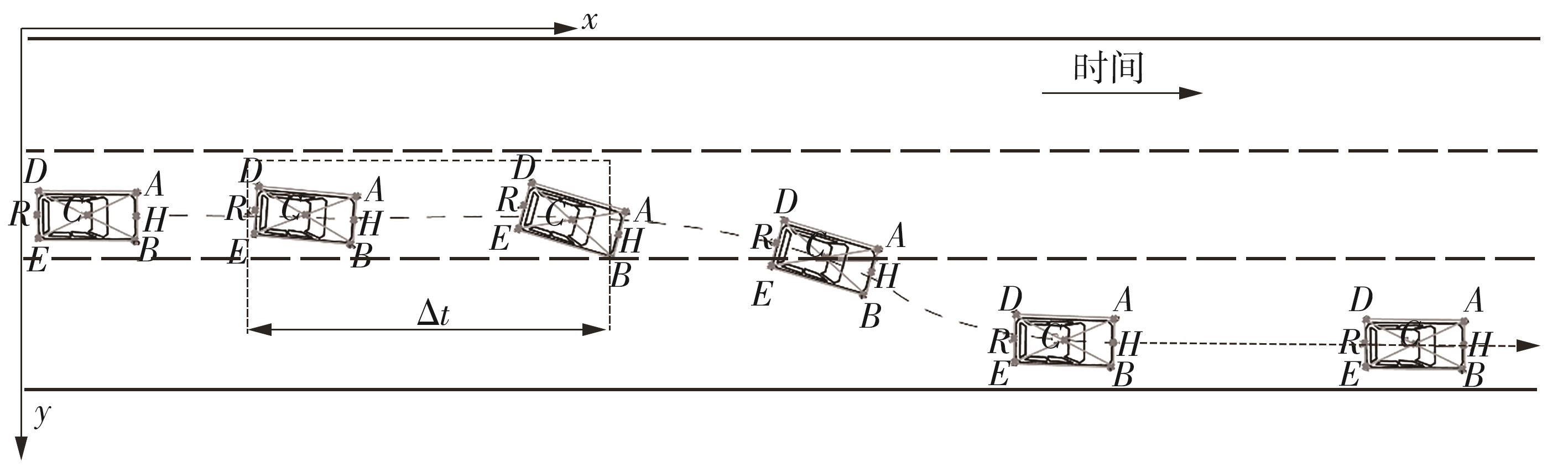

Fig.11
Recognition accuracies of LSTM, TCN, SVM and TCN-LSTM models under different time series lengths"


Fig.12
Confusion matrixes of four classification models"

Table 3
Comparisons of recognition accuracies for lane change intention among SVM, TCN, LSTM and TCN-LSTM models"
| 模型 | 类别 | 精确率/% | 召回率/% | 准确率/% |
|---|---|---|---|---|
| TCN | LK | 90.47 | 97.36 | 95.83 |
| RLC | 98.17 | 95.77 | ||
| LLC | 98.81 | 94.28 | ||
| LSTM | LK | 90.10 | 96.40 | 95.33 |
| RLC | 97.83 | 95.56 | ||
| LLC | 97.93 | 93.73 | ||
| SVM | LK | 88.31 | 97.29 | 94.21 |
| RLC | 97.23 | 93.46 | ||
| LLC | 96.88 | 92.10 | ||
| TCN-LSTM | LK | 94.19 | 95.70 | 96.67 |
| RLC | 98.99 | 97.13 | ||
| LLC | 96.37 | 97.16 |
| 1 | CHEN T, SHI X, WONG Y D,et al .Predicting lane-changing risk level based on vehicles’ space-series features:a pre-emptive learning approach[J].Transportation Research Part C:Emerging Technologies,2020,116:102646/1-21. |
| 2 | HOU Y, EDARA P, SUN C .Situation assessment and decision making for lane change assistance using ensemble learning methods[J].Expert Systems with Applications,2015,42:3875-3882. |
| 3 | 王亚伦 .基于驾驶意图识别的人机共驾车道保持控制系统研究[D].青岛:青岛大学,2022. |
| 4 | 李亚秋,吴超仲,马晓凤,等 .基于EKF学习方法的BP神经网络汽车换道意图识别模型研究[J].武汉理工大学学报(交通科学与工程版),2013,37(4):843-847. |
| LI Yaqiu, WU Chaozhong, MA Xiaofeng,et al .A recognition model for lane change intention based on neural network with EKF algorithm[J].Journal of Wuhan University of Technology (Transportation Science & Engineering),2013,37(4):843-847. | |
| 5 | XU G, LIU L,OU Y .Dynamic modeling of driver control strategy of lane-change behavior and trajectory planning for collision prediction[J].IEEE Transactions on Intelligent Transportation Systems,2012,13(3):1138-1155. |
| 6 | MCCALL J C, WIPF D P, TRIVEDI M M,et al .Lane change intent analysis using robust operators and sparse Bayesian learning[J].IEEE Transactions on Intelligent Transportation Systems,2007,8(3):431-440. |
| 7 | LI K, WANG X, XU Y,et al .Lane changing intention recognition based on speech recognition models[J].Transportation Research Part C:Emerging Technologies,2016,69:497-514. |
| 8 | 彭金栓,付锐,郭应时,等 .基于驾驶人视觉特性的换道意图识别方法[J].武汉理工大学学报,2013,35(3):73-79. |
| PENG Jin-shuan, FU Rui, GUO Ying-shi,et al .Lane change intent identification based on drivers’ visual characteristics[J].Journal of Wuhan University of Technology,2013,35(3):73-79. | |
| 9 | 袁伟,付锐,郭应时,等 .基于视觉特性的驾驶人换道意图识别[J].中国公路学报,2013,26(4):132-138. |
| YUAN Wei, FU Rui, GUO Ying-shi,et al .Drivers’ lane changing intention identification based on visual characteristics[J].China Journal of Highway and Transport,2013,26(4):132-138. | |
| 10 | 商艳,朱守林,戚春华 .基于瞳孔变动视觉特征的驾驶人换道意图识别[J].计算机仿真,2020,37(8):77-81. |
| SHANG Yan, ZHU Shou-lin, QI Chun-hua .Driver lane change intention recognition based on pupil characteristics[J].Computer Simulation,2020,37(8):77-81. | |
| 11 | 彭金栓,付锐,邵毅明,等 .基于Logistic模型的驾驶人换道意图识别方法[J].科技导报,2014,32(14):69-73. |
| PENG Jinshuan, FU Rui, SHAO Yiming,et al .Lane changing intent identification based on Logistic regression model[J].Science & Technology Review,2014,32(14):69-73. | |
| 12 | 宋晓琳,曾艳兵,曹昊天,等 .基于长短期记忆网络的换道意图识别方法[J].中国公路学报,2021,34(11):236-245. |
| SONG Xiao-lin, ZENG Yan-bing, CAO Hao-tian .Lane change intention recognition method based on LSTM network[J].China Journal of Highway and Transport,2021,34(11):236-245. | |
| 13 | 方艺洁,廖祝华,黄浩楷,等 .多模型融合的换道意图识别研究[J].计算机工程与应用,2024,60(2):344-352. |
| FANG Yijie, LIAO Zhuhua, HUANG Haokai,et al .Lane change intention recognition based on multi-model fusion[J].Computer Engineering and Applications,2024,60(2):344-352. | |
| 14 | 张海伦,付锐 .高速场景相邻前车驾驶行为识别及意图预测[J].交通运输系统工程与信息,2020,20(1):40-46. |
| ZHANG Hai-lun, FU Rui .Driving behavior recognition and intention prediction of adjacent preceding vehicle in highway scene[J].Journal of Transportation Systems Engineering and Information Technology,2020,20(1):40-46. | |
| 15 | 张新锋,王万宝,柳欢,等 .高速动态交通场景下自动驾驶车辆换道意图识别模型研究[J].汽车技术,2023(4):8-15. |
| ZHANG Xinfeng, WANG Wanbao, LIU Huan,et al .Research on lane change intention recognition model of automated vehicle in high-speed dynamic traffic scenario[J].Automobile Technology,2023(4):8-15. | |
| 16 | 卢辉遒,赵枫,谢波,等 .冰雪环境下基于神经网络的驾驶人换道意图识别[J].吉林大学学报(工学版),2023,53(1):273-284. |
| LU Huiqiu, ZHAO Feng, XIE Bo,et al .Driver’s lane change intention recognition in snow and ice environment based on neural network[J].Journal of Jilin University (Engineering and Technology Edition),2023,53(1):273-284. | |
| 17 | DANG R, ZHANG F, WANG J,et al .Analysis of Chinese driver’s lane change characteristic based on real vehicle tests in highway[C]∥Proceedings of the 16th International IEEE Conference on Intelligent Transportation Systems (ITSC 2013).The Hague:IEEE,2013:1917-1922. |
| 18 | KUMAR P, PERROLLAZ M, LEFEVRE S,et al .Learning-based approach for online lane change intention prediction[C]∥Proceedings of the 2013 IEEE Intelligent Vehicles Symposium (Ⅳ).Queensland:IEEE,2013:797-802. |
| 19 | GAO J, YI J, MURPHEY Y .Joint learning of video images and physiological signals for lane-changing behavior prediction[J].Transportmetrica A:Transport Science,2022,18(3):1234-1253. |
| 20 | 王亚伦,陈焕明,赵岩 .基于条件随机场的驾驶意图识别研究[J].青岛大学学报(工程技术版),2021,36(4):88-94,114. |
| WANG Yalun, CHEN Huanming, ZHAO YAN .Research on driving intention recognition based on conditional random field[J].Journal of Qingdao University (Engineering & Technology Edition),2021,36(4):88-94,114. | |
| 21 | 杨志强,朱家伟,穆蕾,等 .基于高斯混合隐马尔科夫模型的自由换道识别[J].计算机系统应用,2022,31(8):388-394. |
| YANG Zhi-Qiang, ZHU Jia-Wei, MU Lei,et al .Recognition of free lane change based on Gaussian mixture hidden Markov model[J].Computer Systems & Applications,2022,31(8):388-394. | |
| 22 | 季学武,费聪,何祥坤,等 .基于LSTM网络的驾驶意图识别及车辆轨迹预测[J].中国公路学报,2019,32(6):34-42. |
| JI Xue-wu, FEI Cong, HE Xiang-kun,et al .Intention recognition and trajectory prediction for vehicles using LSTM network[J].China Journal of Highway and Transport,2019,32(6):34-42. | |
| 23 | PARK M, JANG K, LEE J,et al .Logistic regression model for discretionary lane changing under congested traffic[J].Transportmetrica A:Transport Science,2015,11(4):333-344. |
| 24 | KOENIG A, REHDER T, HOHMANN S .Exact inference and learning in hybrid Bayesian Networks for lane change intention classification[C]∥Proceedings of the 2017 IEEE Intelligent Vehicles Symposium (Ⅳ).Los Angeles:IEEE,2017:1535-1540. |
| 25 | 陈亮,冯延超,李巧茹 .基于Multi-class SVM的车辆换道行为识别模型研究[J].安全与环境学报,2020,20(1):193-199. |
| CHEN Liang, FENG Yan-chao, LI Qiao-ru .Probe into the multi-class SVM-based recognition model for the vehicle lane-altering behaviors[J].Journal of Safety and Environment,2020,20(1):193-199. | |
| 26 | BAI S, KOLTER J Z, KOLTUN V .An empirical evaluation of generic convolutional and recurrent networks for sequence modeling[C]∥Proceedings of the International Conference on Learning Representations (ICLR) Workshop.Vancouver:[s. n.],2018. |
| 27 | ZHENG O, ABDEL A M, YUE L,et al .CitySim:a drone-based vehicle trajectory dataset for safety oriented research and digital twins[J].National Academy of Sciences:Transportation Research Board,2024,2678(4):606-621. |
| 28 | HE K, ZHANG X, REN S,et al .Deep residual learning for image recognition[C]∥Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition.Las Vegas:IEEE,2016:770-778. |
| 29 | COIFMAN B, LI L .A critical evaluation of the next generation simulation (NGSIM) vehicle trajectory dataset[J].Transportation Research Part B:Methodological,2017,105:362-377. |
| 30 | GU X, ABDEL A M, XIANG Q,et al .Utilizing UAV video data for in-depth analysis of drivers’ crash risk at interchange merging areas[J].Accident Analysis & Prevention,2019,123:159-169. |
| [1] | LONG Xueqin, WANG Han, WANG Ruixuan. Taxi Trajectory Characteristics Analysis Based on Frequent Sequence Mining [J]. Journal of South China University of Technology(Natural Science Edition), 2024, 52(6): 24-33. |
| [2] | LEI Cailin, ZHAO Cong, LOU Ren, JI Yuxiong, DU Yuchuan. Quality Assessment Method of Vehicle Trajectory Data from Roadside Perception [J]. Journal of South China University of Technology(Natural Science Edition), 2024, 52(6): 56-72. |
| [3] | ZHANG Wenhui, LIU Tuo, SONG Yajing, et al. Identification of Hazardous Driving Hotspots of Conventional Urban Bus Based on Spatial Autocorrelation [J]. Journal of South China University of Technology(Natural Science Edition), 2024, 52(4): 138-150. |
| [4] | ZHAO Xiaomei, ZHU Xiangyuan, WANG Qin, et al. Operational Reliability Optimization Strategies of Multi-type Bus Lines [J]. Journal of South China University of Technology(Natural Science Edition), 2023, 51(8): 32-39. |
| [5] | LIN Yongjie, CHEN Ning, LU Kai. Vehicle Trajectory Tracking at Intersections Based on Millimeter Wave Radar Point Cloud [J]. Journal of South China University of Technology(Natural Science Edition), 2023, 51(10): 110-125. |
| [6] | WENG Jiancheng, WANG Maolin, LIN Pengfei, et al. Cross-line Combined Bus Scheduling Optimization Method Based on Passenger Flow Characteristic Identification [J]. Journal of South China University of Technology(Natural Science Edition), 2022, 50(9): 39-48. |
| [7] | QIN Yaqin, QIAN Zhengfu, XIE Jiming, et al. Cooperative Lane Change Decision-Making Model of Bottleneck Emergency Section in Weaving Area Based on Social Force [J]. Journal of South China University of Technology(Natural Science Edition), 2022, 50(7): 66-75. |
| [8] | YUAN Hua CHEN Zehao. Short-term Traffic Flow Prediction Based on Temporal Convolutional Networks [J]. Journal of South China University of Technology (Natural Science Edition), 2020, 48(11): 107-113,122. |
| [9] | ZHANG Nian LUO Xia ZHANG Ke. Bus Travel Choice Reversals Based on the Equate-to-Differentiate Theory [J]. Journal of South China University of Technology(Natural Science Edition), 2019, 47(9): 61-67. |
| [10] | CHAI Linguo CAI Baigen SHANGGUAN Wei WANG Jian WANG Huashen. A Construction Approach Based on Kinematic Simulation Environment for Networked Intelligent Vehicles [J]. Journal of South China University of Technology (Natural Science Edition), 2018, 46(1): 66-77. |
| [11] | Xu Hong-feng He Long Zhang Kun. Coordinated Signal Timing Optimization at Closely-Spaced Split Midblock Crosswalks [J]. Journal of South China University of Technology (Natural Science Edition), 2015, 43(12): 106-113. |
| [12] | Yang Zhao-sheng Qu Xin Lin Ci-yun Bing Qi-chun Gong Bo-wen. Traffic Signal Optimization Method Considering Low Emissions and Short Delay [J]. Journal of South China University of Technology (Natural Science Edition), 2015, 43(10): 29-34,41. |
| [13] | Yang Qing- fang Mei Duo Zheng Li- li Ma Ming- hui Wang Wei. Cloud Computing- Based Genetic Algorithm to Solve the Shortest Path in Urban Rood Networks [J]. Journal of South China University of Technology (Natural Science Edition), 2014, 42(3): 47-51,58. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||