Journal of South China University of Technology(Natural Science Edition) ›› 2023, Vol. 51 ›› Issue (10): 110-125.doi: 10.12141/j.issn.1000-565X.230100
Special Issue: 2023绿色智慧交通系统专辑
• Green, Intelligent Traffic System • Previous Articles Next Articles
Vehicle Trajectory Tracking at Intersections Based on Millimeter Wave Radar Point Cloud
LIN Yongjie1,2 CHEN Ning1 LU Kai1,2
- 1.School of Civil Engineering and Transportation,South China University of Technology,Guangzhou 510640,Guangdong,China
2.Guangdong Artificial Intelligence and Digital Economy Laboratory,Guangzhou 510330,Guangdong,China
-
Received:2022-03-08Online:2023-10-25Published:2023-06-06 -
Contact:卢凯(1979-),男,教授,博士生导师,主要从事交通信号控制、交通大数据挖掘和车路协同研究。 E-mail:kailu@scut.edu.cn -
About author:林永杰(1987-),男,副教授,博士生导师,主要从事交通检测与数据建模、交通信号控制、车路协同研究。E-mail:linyjscut@scut.edu.cn -
Supported by:the Natural Science Foundation of Guangdong Province Youth Enhancement Project(2023A1515030120);the National Natural Science Foundation of China(61903145)
CLC Number:
Cite this article
LIN Yongjie, CHEN Ning, LU Kai. Vehicle Trajectory Tracking at Intersections Based on Millimeter Wave Radar Point Cloud[J]. Journal of South China University of Technology(Natural Science Edition), 2023, 51(10): 110-125.
share this article
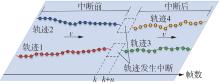
Fig.1
Discontinuous trajectory of the same target"


Fig.2
Type of discontinuity trajectory"
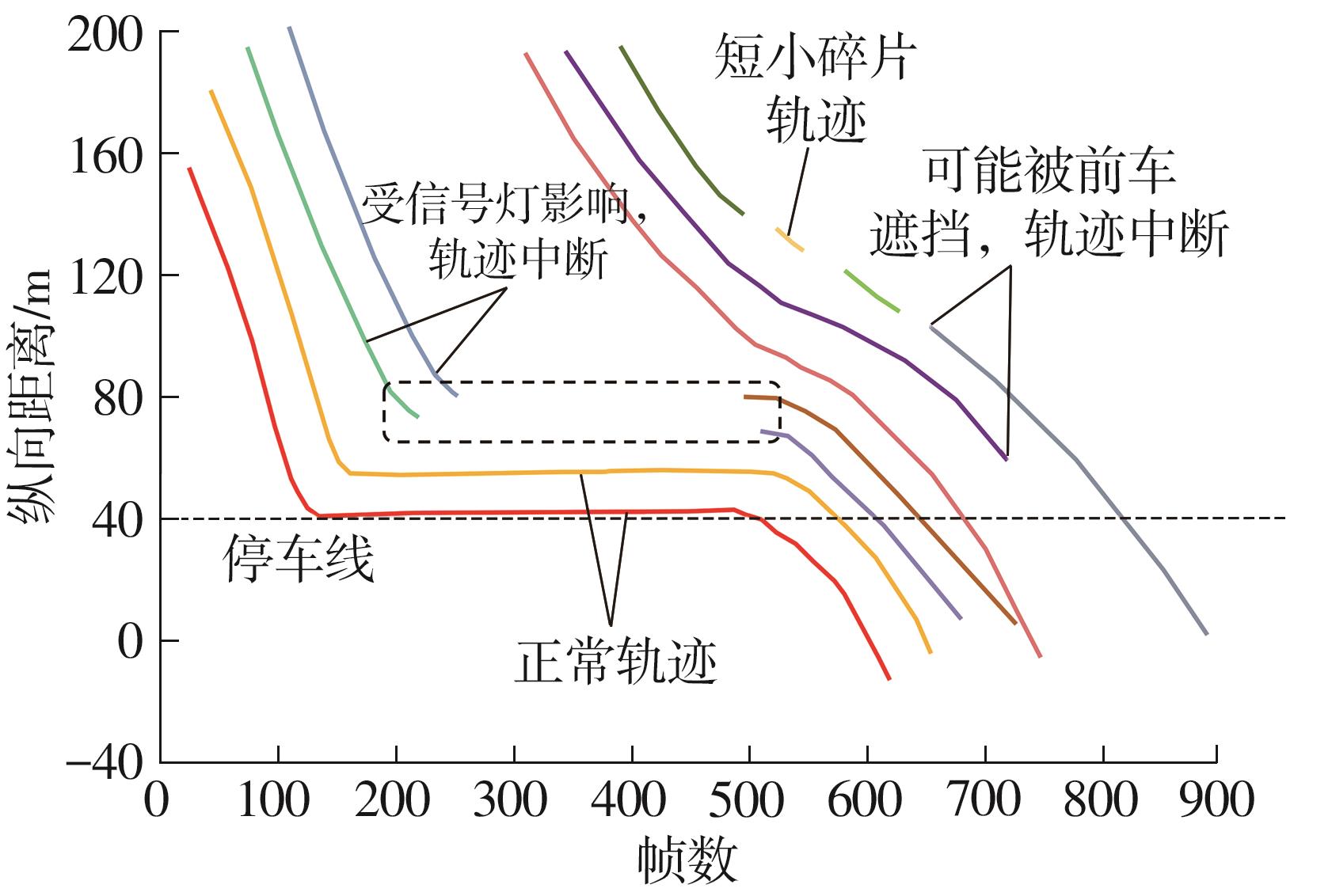

Fig.3
Single target multiple trajectories"
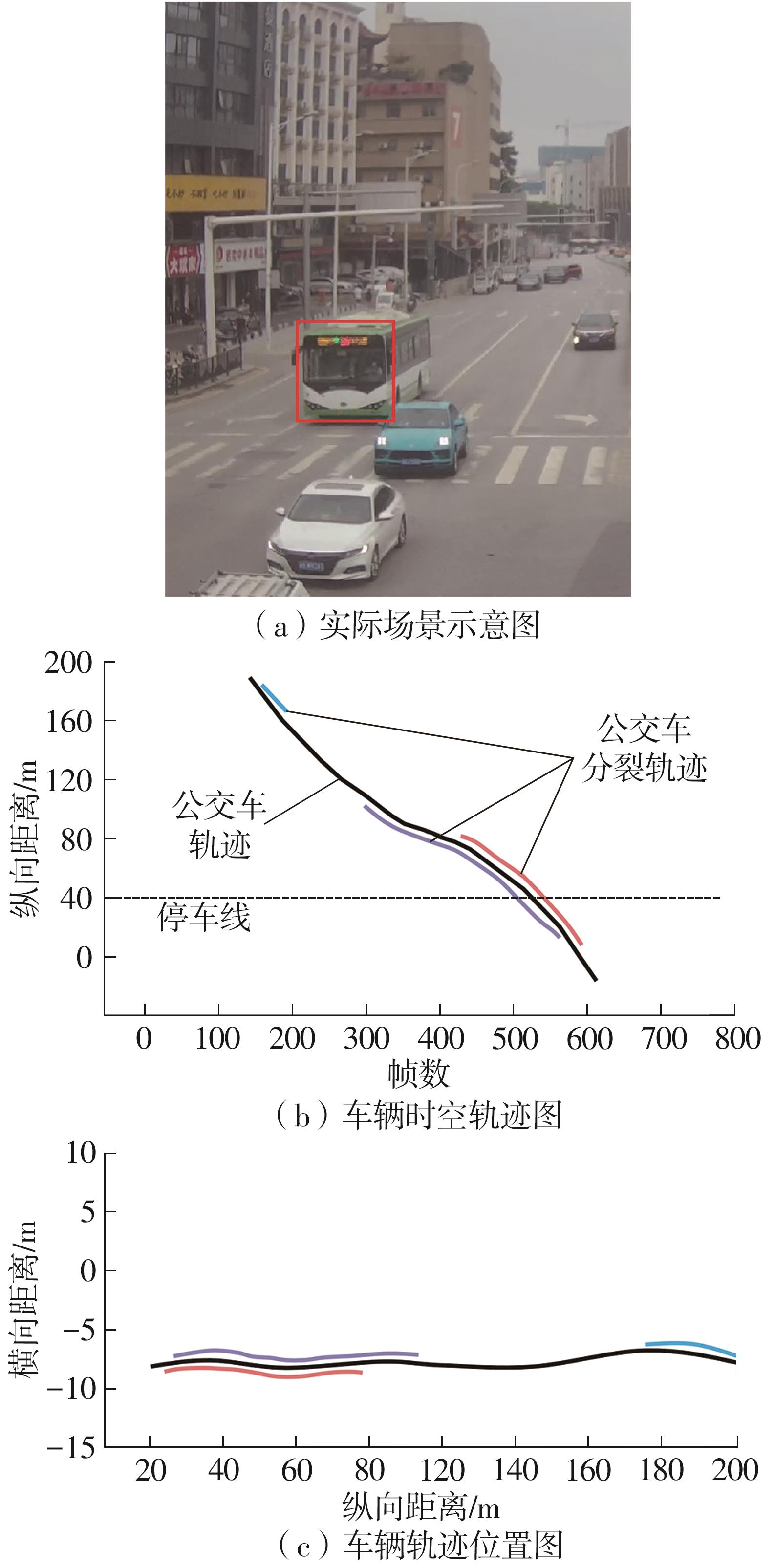
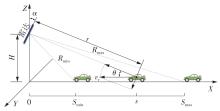
Fig.4
Diagram of radar installation location"


Fig.5
Framework of vehicle trajectory extraction model"
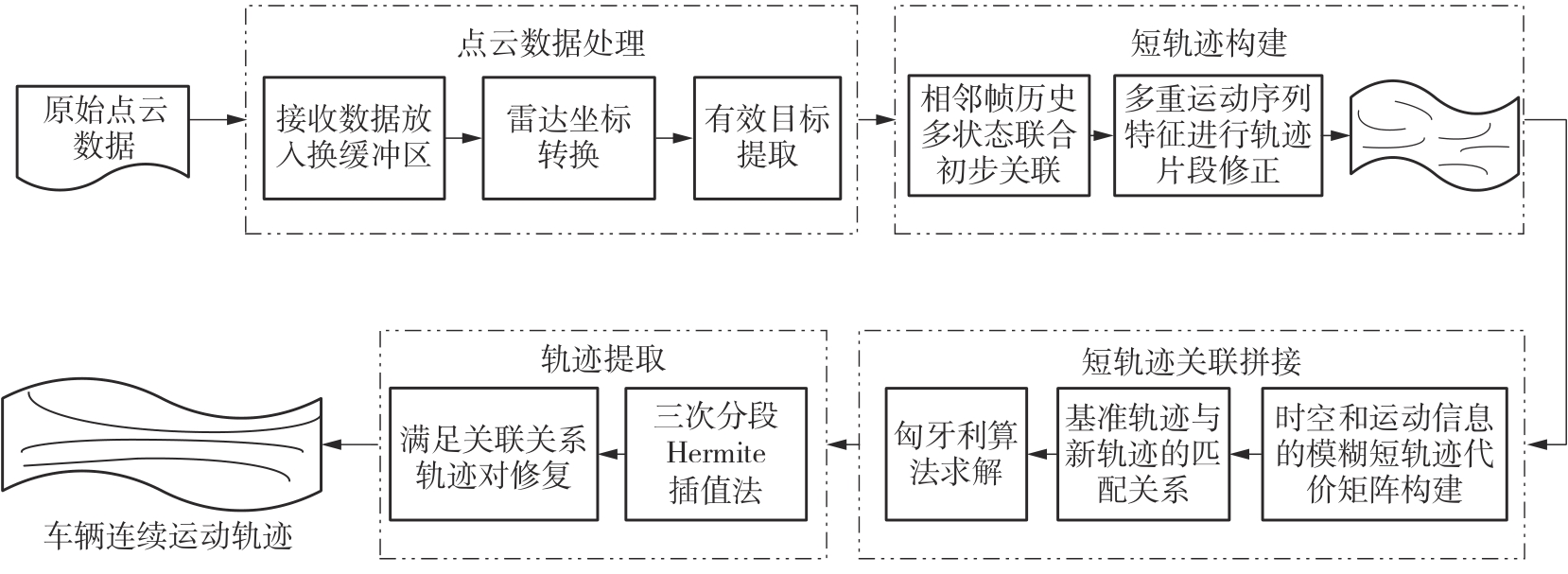

Fig.6
Association pattern of two adjacent frames under the different number of targets"

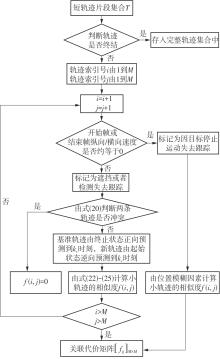
Fig.7
Association cost matrix calculation flow chart"
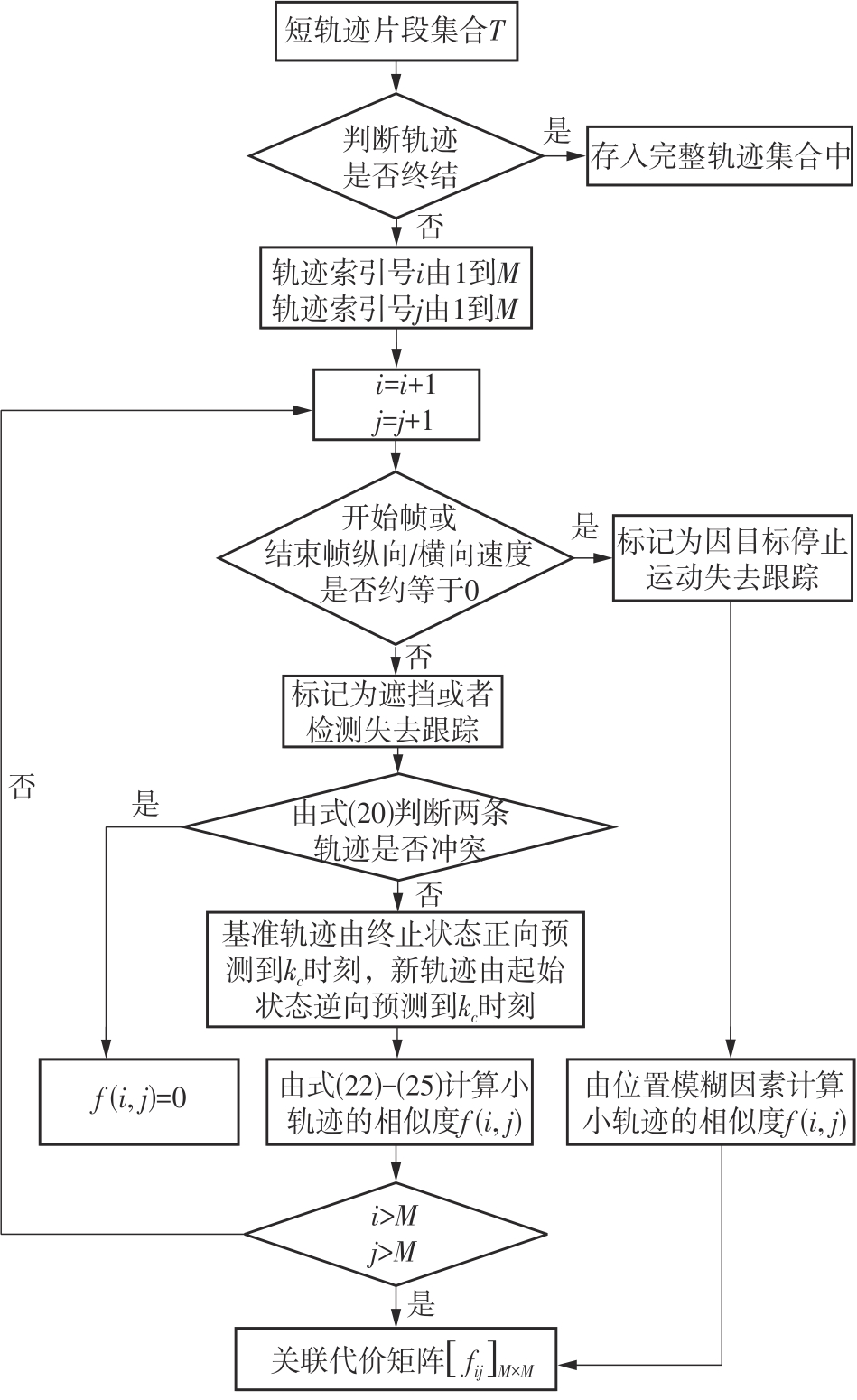
Table 1
Detailed parameters of millimeter wave radar"
| 参数 | 数值 |
|---|---|
| 最大目标个数 | 256 |
| 最大纵向探测距离/m | 250 |
| 最大横向探测距离/m | 50 |
| 速度范围/ | -300~300 |
| 速度分辨率/ | 0.47(探测距离:100~250) 0.37(探测距离:10~100) |
| 探测距离精度/m | ±0.4(探测距离:100~250) 0.1(探测距离:10~100) |
| 探测距离分辨率/m | 1.79(探测距离:100~250) 0.39(探测距离:10~100) |

Fig.8
Diagram of millimeter wave radar monitoring scenario"

Table 2
Description of four test scenarios"
测试 场景 | 测试集 总帧数 | 检测方向 | 车道数 | 轨迹真值数目 | 大车比例/% | 非机动车比例/% | 场景特点 |
|---|---|---|---|---|---|---|---|
| A | 1 230 | 全向 | 8 | 95 | 9.4 | 13.7 | 前500帧车辆密集,遮挡较多 |
| B | 1 135 | 全向 | 8 | 87 | 5.7 | 6.9 | 去向车辆较为分散,目标车头间距较大,几乎无遮挡情况发生;来向车辆数目适中,有部分遮挡 |
| C | 1 399 | 来向 | 4 | 31 | 0.0 | 35.5 | 目标逐渐接近雷达传感器,车辆数目适中,有较多等待红绿灯车辆 |
| D | 2 863 | 去向 | 4 | 94 | 5.3 | 14.9 | 目标逐渐远离雷达传感器,后1 400帧车辆密集,遮挡较多,有公交停靠站 |
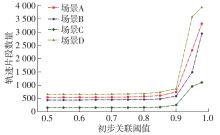
Fig.9
Impact of initial association threshold on the number of tracklets"

Table 3
Initial association results with ξθ=0.9"
| 场景 | 初步关联生成短轨迹段数量 | 初步关联阈值 |
|---|---|---|
| A | 738 | 0.9 |
| B | 587 | 0.9 |
| C | 253 | 0.9 |
| D | 867 | 0.9 |
Table 4
Comparisons of vehicle tracking results by two methods under four scenarios"
| 试验场景 | 方法 | 真实轨迹数 | 跟踪结果 | AOT/% | Frags | IDS |
|---|---|---|---|---|---|---|
| 场景A | NNDA方法 | 95 | 164 | 64.2 | 18 | 1.70 |
| 本文方法 | 101 | 94.7 | 7 | 1.20 | ||
| 场景B | NNDA方法 | 87 | 152 | 62.1 | 16 | 1.80 |
| 本文方法 | 92 | 91.5 | 4 | 1.10 | ||
| 场景C | NNDA方法 | 31 | 67 | 45.1 | 11 | 2.16 |
| 本文方法 | 34 | 90.3 | 3 | 1.00 | ||
| 场景D | NNDA方法 | 94 | 145 | 67.0 | 19 | 1.50 |
| 本文方法 | 100 | 92.6 | 5 | 1.00 |

Fig.10
Vehicle tracking results by the proposed method under scenario A"
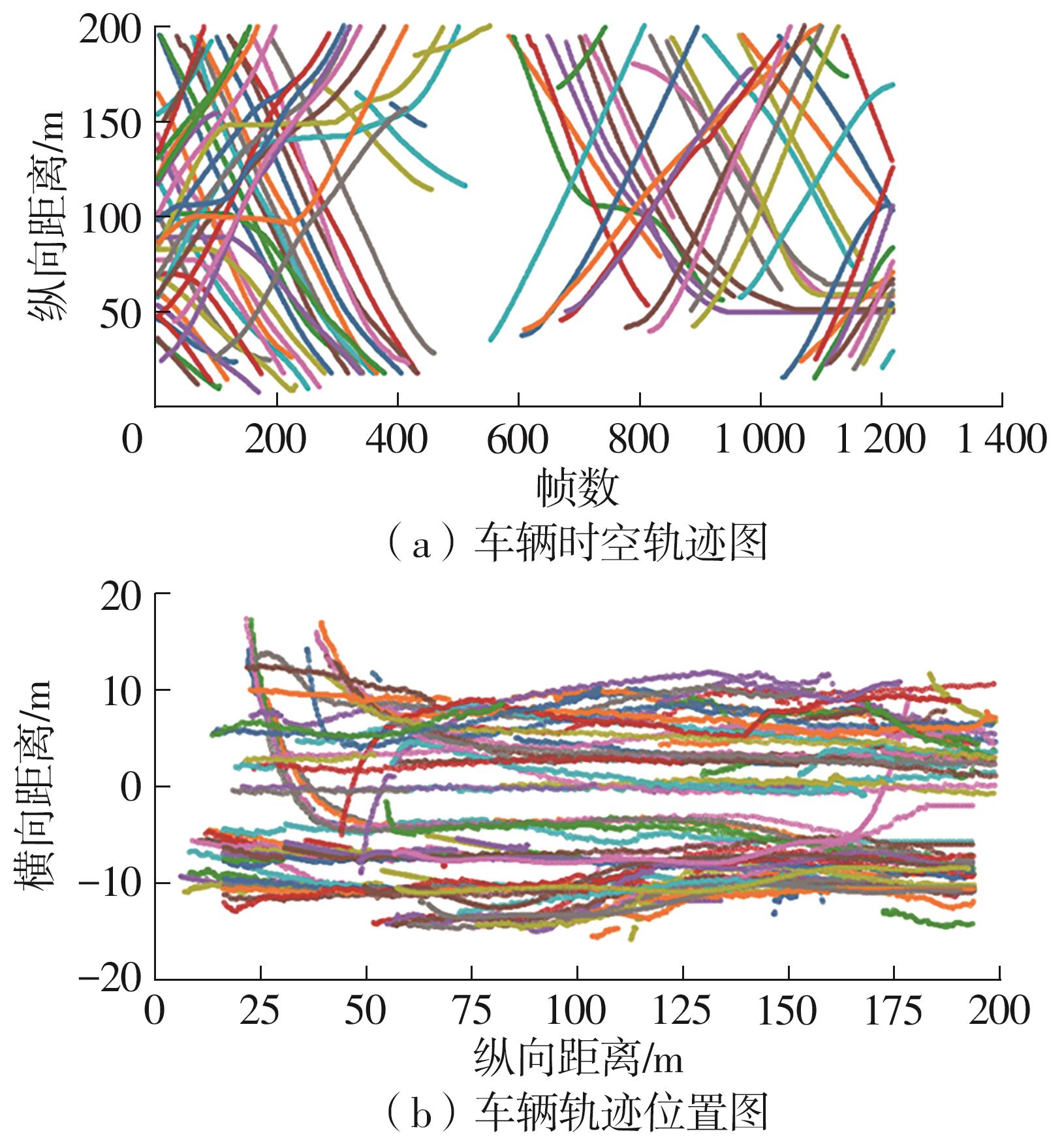

Fig.11
Vehicle tracking results by the proposed method under scenario B"


Fig.12
Vehicle tracking results by the proposed method under scenario C"

Fig.13
Vehicle tracking results by the proposed method under scenario D"


Fig.14
Track interruption under vehicle lane changing"


Fig.15
Vehicle tracking by NNDA methods under vehicle lane changing"

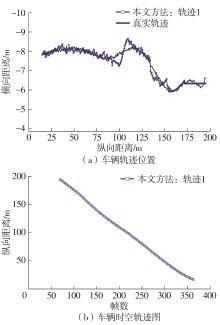
Fig.16
Vehicle tracking by the proposed method under vehicle lane changing"


Fig.17
Single-frame tracking results by the proposed method under vehicle barrier"


Fig.18
Track interruption under vehicle go-stand-go"

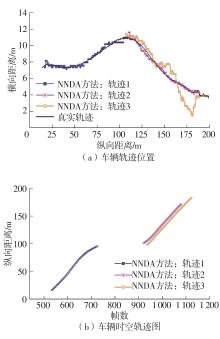
Fig.19
Tracking comparison by NNDA methods under vehicle go-stand-go"

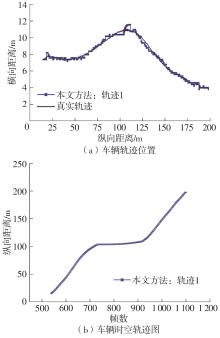
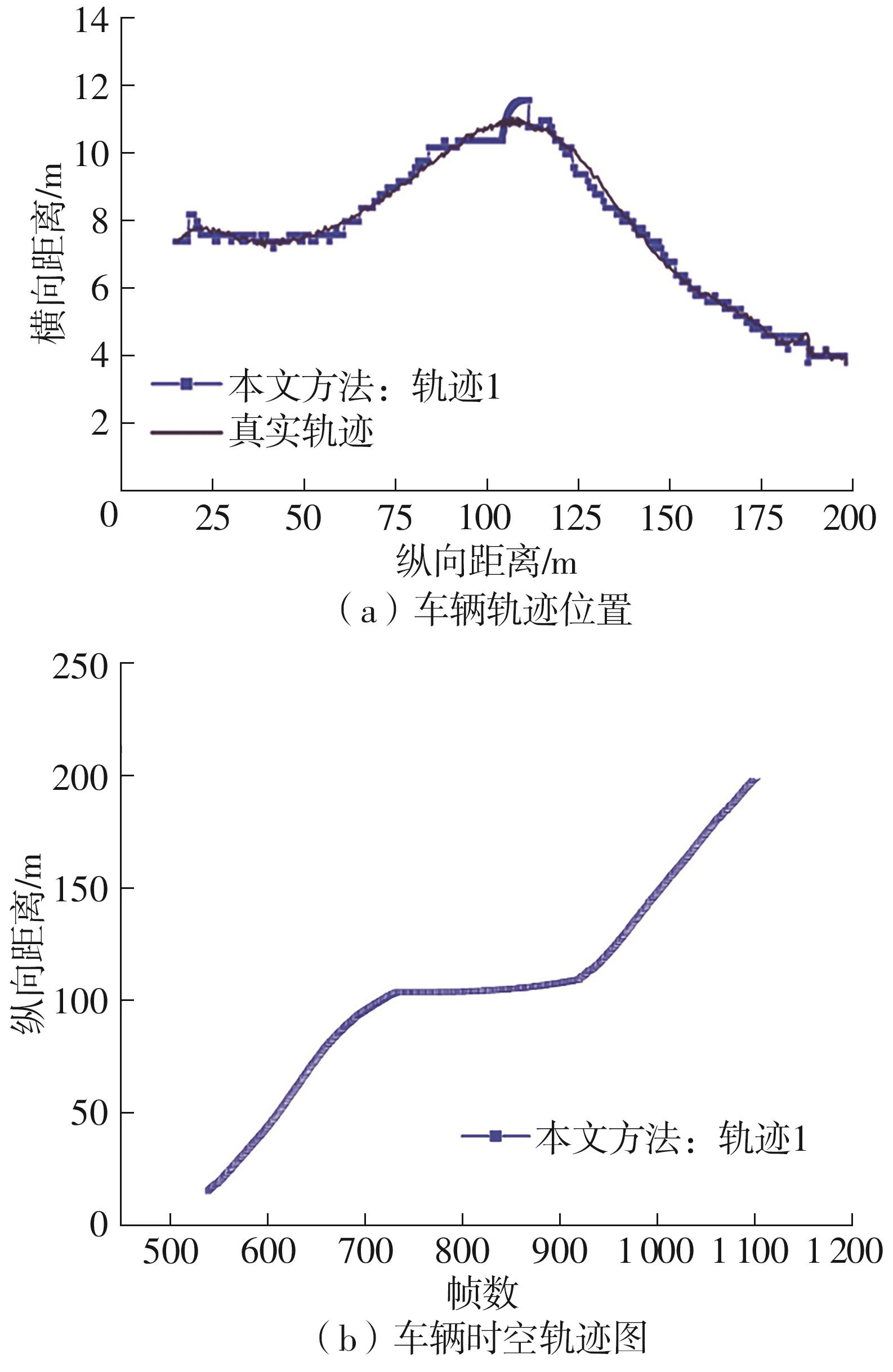
Fig.20
Tracking comparison of the proposed method under vehicle go-stand-go"
| 1 | NASERNEJAD P, SAYED T, AlSALEH R .Modeling pedestrian behavior in pedestrian vehicle near misses:a continuous gaussian process inverse reinforcement learning (GP-IRL) approach[J].Accident Analysis and Prevention,2021,161:106355/1-15. |
| 2 | 马小龙,余强,刘建蓓 .基于路侧毫米波雷达的车辆碰撞概率计算方法[J].交通运输系统工程与信息,2022,22(1):57-66. |
| MA Xiao-long, YU Qiang, LIU Jian-bei .A calculation method of vehicle collision probability based on roadside millimeter wave radar[J].Journal of Transportation Systems Engineering and Information Technology,2022,22(1):57-66. | |
| 3 | CHEN Q, GU R, HUANG H,et al .Using vehicular trajectory data to explore risky factors and unobserved heterogeneity during lane-changing[J].Accident Analysis and Prevention,2021,151:106355/1-9. |
| 4 | 游峰,梁健中,曹水金,等 .面向多目标跟踪的密集行人群轨迹提取和运动语义感知[J].交通运输系统工程与信息,2021,21(6):42-54. |
| YOU Feng, LIANG Jian-zhong, CAO Shui-jin,et al .Dense pedestrian crowd trajectory extraction and motion semantic information perception based on multi-object tracking[J].Journal of Transportation Systems Engineering and Information Technology,2021,21(6):42-54. | |
| 5 | FU T, HU W, MIRANDA-MORENO L,et al .Investigating secondary pedestrian-vehicle interactions at non-signalized intersections using vision-based trajectory data[J].Transportation Research Part C:Emerging Technologies,2019,105:222-240. |
| 6 | CHEN J, TIAN S, XU H,et al .Architecture of vehicle trajectories extraction with roadside Lidar serving connected vehicles[J].IEEE Access,2019,7:100406-100415. |
| 7 | 辜志强,吉鑫钰,褚端峰,等 .基于全局位置精度损失最小化的路侧多传感器目标关联匹配方法[J].中国公路学报,2022,35(3):286-294. |
| GU Zhi-qiang, JI Xin-yu, CHU Duan-feng,et al .A roadside multi-sensor target association matching method based on minimization of global position precision loss[J].China Journal of Highway and Transport,2022,35(3):286-294. | |
| 8 | PANTRIGO J, HERNÁNDEZ J, SÁNCHEZ A .Multiple and variable target visual tracking for video-surveillance applications[J].Pattern Recognition Letters,2010,31(12):1577-1590. |
| 9 | CHEN X, LI Z, YANG Y,et al .High-resolution vehicle trajectory extraction and denoising from aerial videos[J].IEEE Transactions on Intelligent Transportation Systems,2021,22(5):3190-3202. |
| 10 | ZHANG J, XIAO W, COIFMAN B,et al .Vehicle tracking and speed estimation from roadside Lidar[J].IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing,2020,13:5597-5608. |
| 11 | ZANG S, DING M, SMITH D,et al .The impact of adverse weather conditions on autonomous vehicles:how Rain,snow,fog,and hail affect the performance of a self-driving car[J].IEEE Vehicular Technology Magazine,2019,14(2):103-111. |
| 12 | SALOUS S, GAILLOT D, MOLINA J M,et al .Inclusive radio communications for 5G and beyond:IRACON channel measurements and models[M].Pittsburgh:Academic Press,2021:49-105. |
| 13 | JIANG W, HUANG Y, YANG J .Automatic censoring CFAR detector based on ordered data difference for low-flying helicopter safety[J].Sensors,2016,16(7):1055. |
| 14 | LUDENO G, CATAPANO I, RENGA A,et al .Assessment of a Micro-UAV system for microwave tomography radar imaging[J].Remote Sensing of Environment,2018,212:90-102. |
| 15 | LIU H, TENG K,RAI L,et al .A two‐step abnormal data analysis and processing method for millimetre‐wave radar in traffic flow detection applications[J].IET Intelligent Transport Systems,2021,15(5):671-682. |
| 16 | 刘东波,沈莉潇,代磊磊,等 .基于多目标雷达数据的单点交通信号控制方法[J].吉林大学学报(工学版),2022,52(10):2456-2465. |
| LIU Dong-bo, SHEN Li-xiao, DAI Lei-lei,et al .Traffic signal control method at isolated intersections based on multi-target radar data[J].Journal of Jilin University (Engineering and Technology Edition),2022,52(10):2456-2465. | |
| 17 | LIU G, ZHOU M, WANG L,et al .A blind spot detection and warning system based on millimeter wave radar for driver assistance[J].Optik,2017,135:353-365. |
| 18 | SHI M, LING Q, YU Z,et al .Association using modified global nearest neighbor in the presence of bias[C]∥Proceedings of the 32nd Chinese Control Conference,Xi’an:IEEE,2013:4688-4691. |
| 19 | SVENSSON L, SVENSSON D, GUERRIERO M,et al .Set JPDA filter for multi target tracking[J].IEEE Transactions on Signal Processing,2011,59(10):4677-4691. |
| 20 | BLACKMAN S .Multiple hypothesis tracking for multiple target tracking[J].IEEE Aerospace and Electronic Systems Magazine,2004,19(1):5-18. |
| 21 | HUANG C, WU B, NEVATIA R .Robust object tracking by hierarchical association of detection responses[C]∥Proceedings of the 10th European Conference on Computer Vision(ECCV).Marseille:Springer Berlin Heidelberg,2008:788-801. |
| 22 | YANG B, NEVATIA R .Multi-target tracking by online learning a CRF model of appearance and motion patterns[J].International Journal of Computer Vision,2014,107:203-217. |
| 23 | LEUNG V, HERBIN S .Flexible tracklet association for complex scenarios using a Markov Logic Network[C]∥Proceedings of the 2011 IEEE International Conference on Computer Vision Workshops (ICCV Workshops).Barcelona:IEEE,2011:1870-1875. |
| 24 | SHITRIT H B, BERCLAZ J, FLEURET F,et al .Multi-commodity network flow for tracking multiple people[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,2013,36(8):1614-1627. |
| 25 | SUN J, WANG N, ZHANG Z .Track segment association of maneuvering target based on expectation maximization[C]∥Proceeding of the 11th International Congress on Image and Signal Processing,Bio Medical Engineering and Informatics (CISP-BMEI).Beijing:IEEE,2018:1-5. |
| 26 | SONG S, WU J, ZHANG S,et al .Research on target tracking algorithm using millimeter-wave radar on curved road[J].Mathematical Problems in Engineering,2020,2020:3749759/1-21. |
| 27 | SÁNCHEZ-ORO J, FERNÁNDEZ-LÓPEZ D, CABIDO R,et al .Radar-based road-traffic monitoring in urban environments[J].Digital Signal Processing,2013,23(1):364-374. |
| 28 | 李立,吴晓强,杨文臣,等 .基于路侧毫米波雷达的群体车辆目标识别与跟踪[J].吉林大学学报(工学版).. |
| LI Li, WU Xiao-qiang, YANG Wen-chen,et al .Target recognition and tracking of group vehicles based on roadside millimeter-wave radar[J].Journal of Jilin University (Engineering and Technology Edition).. | |
| 29 | WANG J, FU T, XUE J,et al .Realtime wide-area vehicle trajectory tracking using millimeter-wave radar sensors and the open TJRD TS dataset[J].International Journal of Transportation Science and Technology,2023,12(1):273-290. |
| 30 | 徐平亮,崔亚奇,熊伟,等 .生成式中断航迹接续关联方法[J].系统工程与电子技术,2022,44(5):1543-1552. |
| XU Ping-liang, CUI Ya-qi, XIONG Wei,et al .Generative track segment association method[J].Systems Engineering and Electronics.2022,44(5):1543-1552. | |
| 31 | LIU H, NA L, GUAN D,et al .Data feature analysis of non-scanning multi target millimeter-wave radar in traffic flow detection applications[J].Sensors,2018,18(9):671-682. |
| 32 | GRANSTROM K, SVENSSON L, REUTER S,et al .Likelihood-based data association for extended object tracking using sampling methods[J].IEEE Transactions on Intelligent Vehicles,2017,3(1):30-45. |
| 33 | HABTEMARIAM B, THARMARASA R, THAYAPARAN T,et al .A multiple-detection joint probabilistic data association filter[J].IEEE Journal of Selected Topics in Signal Processing,2013,7(3):461-471. |
| 34 | CHAND A, VISWANATHAN P .A constructive approach to cubic hermite fractal interpolation function and its constrained aspects[J].BIT Numerical Mathematics,2013,53:841-865. |
| 35 | YUAN L, CHANG H, NEVATIA R .Learning to associate:hybridboosted multi-target tracker for crowded scene[C]∥IEEE Conference on Computer Vision & Pattern Recognition.Miami:IEEE,2009:2953-2960 |
| 36 | 王彦平,王端阳,李洋,等 .基于δ-GLMB自适应门限判定的多量测目标跟踪算法[J].信号处理,2021,37(4):518-527. |
| WANG Yan-ping, WANG Duan-yang, LI Yang,et al .An multi-detection target tracking algorithm based on δ-GLMB adaptive threshold determination[J].Journal of Signal Processing,2021,37(4):518-527. |
| No related articles found! |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||