2024年电子、通信与自动控制技术
随着机器人技术的发展,仿人机器人在多个领域展现出应用潜力和价值。针对仿人机器人,基于机器视觉进行自主抓取研究,旨在提高仿人机器人在自然环境中的抓取适应能力和动作仿人性。在机器视觉方面,硬件采用Realsense-D435深度摄像头,利用YOLO(You Only Look Once)物体检测模型实现目标物体的识别、空间定位、深度图裁切和目标点云生成,并根据目标点云与标准点云的配准算法(ICP)获取物体的姿态,通过D-H法对机器人头部进行建模,将物体的位置和姿态由相机坐标系转换为机器人坐标系。在运动规划上,参照人手臂的抓取规律,将抓取过程分为9个基础动作:初始位、移动至预抓取位、抓取物体、提起物体、搬运物体、移动至放置位、放置物体、退出位和回到初始位,针对不同物体确定对应抓取姿态,以提高抓取成功率,根据视觉获取的抓取点和放置点,自主计算余下的关键点,并以空间弧形作为抓取轨迹,通过Matlab仿真,验证抓取过程机械臂末端运动轨迹和关节轨迹的合理性。最后进行物体抓取实验,结果表明,仿人机器人在自然环境中能够快速准确地识别和定位不同物体,并能成功进行抓取和搬运,成功率均在80%以上,并且能够兼顾动作的仿人性,验证了所提出方案的有效性。本研究可促进仿人机器人在人类日常生活中的应用和普及。
GaN HEMT在栅极与源极和漏极之间存在一段通道区域,在等效电路模型中通常等效为一电阻,称为源漏通道区电阻RD,S。准确构建GaN HEMT RD,S模型,对于分析GaN HEMT直流和射频特性,构建GaN HEMT大信号模型具有十分重要的意义。本研究给出考虑自热和准饱和效应的RD,S模型。首先由源漏通道区温度TCH与耗散功率Pdiss的关系,推导出非线性自热效应模型。进一步基于准饱和效应和Trofimenkoff模型,给出源漏通道区电子漂移速度与电场强度的关系表达式,构建非线性RD,S模型。在环境温度Tamb = 300 ~ 500 K时,源漏通道区二维电子气2DEG面密度nS,acc(TCH)和迁移率μacc(TCH)随TCH的升高而下降,这导致低偏置条件下的源漏通道区电阻RD0,S0随TCH呈非线性增长。将本研究和文献报道的RD,S模型与TCAD (Technology Computer Aided Design)仿真数据进行对比,结果显示:本研究与文献报道的漏通道区电阻RD模型的平均相对误差分别为0.32%和1.78%,均方根误差(RMSE)分别为0.039和0.20 Ω;RS模型的平均相对误差分别为0.76%和1.73%,RMSE分别为0.023和0.047 Ω。与文献报道的实验数据进行对比,结果显示:本研究与文献RD模型的平均相对误差分别为0.91%和1.59%,RMSE分别为0.012和0.015 Ω;RS平均相对误差分别为1.22%和2.77%,RMSE分别为0.001 5和0.003 4 Ω。本研究提出的RD,S模型具有更低的平均相对误差和均方根误差,能够更加准确地表征GaN HEMT线性工作区RD,S随漏源电流IDS的变化。可将本模型用于器件的设计优化,也可作为Spice模型用于电路仿真。
信道估计是通信系统中一项关键的技术,涉及评估信号在传输过程中经历的信道特性,以便接收端能够有效地对接收到的信号进行处理和恢复。为提高视距信道遮挡通信下的通信系统质量,使用智能超表面来辅助现有通信系统。智能超表面辅助的无线通信系统中,除了基站和用户之间的视距信道外,同时包含基站到智能超表面和智能超表面到用户之间的级联信道。当前信道估计方法基本上利用传统算法进行估计,为了解决智能超表面辅助多用户系统中复杂统计分布的级联信道估计精度低和计算复杂度高的问题,文中提出了一种基于传统算法和深度学习算法相结合的信道估计算法。利用传统算法的可解释性和深度学习算法的高性能特性,在卷积网络基础上,提出了一种基于残差密集网络(RDN)的去噪方法。首先按照系统参数模拟生成真实环境的数据集,使用传统最小二乘法(LS)进行信道粗估计,并将信道看作二维含噪图像;其次采用密集块(RDB)充分提取噪声数据局部特征,并使用多路卷积和残差网络对数据进行特征融合;最后通过已训练模型对数据进行在线估计,并得到去噪信道。文中从信道的估计精度对所提算法进行验证,在Rician信道模型上进行理论公式推导和系统仿真分析。仿真结果表明,与传统算法相比,文中所提出的算法提高了信道估计精度。
电动垂直起降(eVTOL)飞行器的运用,作为一种未来城市交通的潜在解决方案,具有缓解城市交通拥堵和提高空中交通效率的巨大潜力。在其常用的导航系统中,通常采用组合导航和传感器余度技术来提高系统可靠性与安全性。然而,在当前导航系统的传感器余度技术中,冗余传感器只起到备份数据的作用,导致测量数据的信息利用率不高。为解决这一问题,文中以三余度的捷联惯性导航系统(SINS)和全球导航卫星系统(GNSS)的组合导航系统为研究对象,提出了一种基于二阶互差分和惯性传感器(IMU)冗余信息的陀螺仪噪声实时估计方法,推导了在二余度和三余度情况下陀螺仪噪声估计的递推式;在获得陀螺仪的噪声估计值后,采用自适应扩展卡尔曼滤波方法将SINS和GNSS的导航信息进行融合,以提高组合导航系统的准确性和鲁棒性。通过对SINS/GNSS组合导航系统进行仿真和真实跑车实验,结果表明:文中方法能够准确估计陀螺仪噪声;相较于传统融合方法,引入陀螺仪噪声实时估计后,组合导航系统的导航精度和抗干扰能力得到了提高,具有实际的工程意义。
随着航天技术的革新,对近地轨道的通信需求逐年增高。近地轨道卫星就在此背景下产生,主要应用于遥感探测天气预报和数据通信领域。由于近地轨道卫星天线辐射波束所覆盖的地球表面是球面,因此波束通常设计为等通量形式。由于卫星通信通常存在极化失配、多径效应等问题,选择多极化而不是圆极化作为近地卫星天线的工作状态能更好地适应复杂的工作环境,保证通信质量,将等通量波束天线和多极化可重构技术结合起来有很大的应用前景。基于一对正交圆极化波能合成线极化波的设计原理,文中提出了一种具有等通量波束的多极化可重构天线,该天线由可重构馈电网络和带扼流环的隔片极化器圆波导组成。馈电网络中嵌入单刀四掷开关(SP4T)与单刀双掷开关(SP2T),通过改变开关的工作状态,馈电网络将给圆波导提供不同的馈电条件,在圆波导内隔片的作用下天线实现两种圆极化与两种线极化的可重构。通过在圆波导口引入扼流环以及波导口作“T”型开槽处理,实现波束赋形,并且保证天线在不同极化状态下辐射等通量波束。实测结果显示,天线在不同的极化状态下-15 dB重叠阻抗带宽14.7%,覆盖4.80~5.56 GHz,方向图顶部在θ为-24°~+24°范围内具有平坦效果,圆极化状态下空间轴比覆盖-51°~+50°,覆盖范围大于方向图顶部平坦范围。天线实测结果与仿真结果有较好的一致性,具有多极化和方向图顶部平坦的优势,可满足移动通信和卫星通信中多极化应用场景的需要。
基于脑电图(EEG)信号的癫痫自动检测对癫痫的临床诊断和治疗有很大的帮助。由于大部分癫痫识别算法忽略了EEG信号的时序关系,为此,文中提出了一种基于多频带路径签名特征的癫痫EEG信号分类方法。此方法首先将EEG信号分解成5个不同频段的频带信号,再通过路径签名算法进行特征提取,然后采用局部主成分分析去除特征相关性并进行特征融合,最后将融合特征送入集成分类器中进行预测分类。由于路径签名可以更深入地挖掘EEG信号的相关关系,结合局部主成分分析后,文中方法可以获取更有鉴别性的癫痫分类特征。分别在时长超过2 000 s癫痫发作片段的本地医院私有数据集和开源的CHB-MIT癫痫数据集上,选用10折交叉进行实验验证,结果表明:在私有数据集上,文中方法的平均分类准确率达到97.25%,比经典的基于经验模态分解(EMD)的方法提高了3.44个百分点,比最新的基于长短期记忆网络(LSTM)+卷积神经网络(CNN)的方法提高了1.35个百分点;在CHB-MIT数据集上,文中方法的平均分类准确率达到98.11%,比经典的基于EMD的方法提高了5.20个百分点,比最新的基于LSTM+CNN的方法提高了2.64个百分点;在两个数据集上文中方法的分类准确率均优于其他对比方法。
由于低频段资源紧缺,未来移动通信网络将逐渐转移至更高频段,电磁波的自由空间传播损耗、绕射损耗以及穿透损耗较大,容易产生覆盖盲区以及弱覆盖区域。智能反射面(RIS)通过重新配置信号的传播环境以提高网络性能并扩大网络覆盖范围,成为解决密集城市群覆盖问题的新热点。基于有RIS参与的下一代移动通信网络密集城市群布网时的多跳通信模式,对多跳RIS传输方案与提出的一种解码转发(DF)中继辅助多跳RIS传输方案(DF-RIS)进行全面比对。首先,对两种传输方案的传输损耗、能效以及系统容量进行了理论推导及分析。其次,在密集城市群三维环境模型中进行仿真,为改善复杂环境搜索效率降低以及计算量增大的问题提出了一种改进Lazy Theta*算法,并对改进算法与常见路径搜索算法的搜索时间以及搜索路径长度进行仿真对比。使用改进算法选取相同仿真环境下两种传输方案分别所需节点,节点选取中考虑了DF中继位于多跳DF-RIS传输方案中的不同位置。最后在确定节点后对两种传输方案的传输损耗、能效以及系统容量进行仿真分析比较。仿真结果不但验证了改进Lazy Theta*算法的有效性,也说明了RIS反射元件数与两种传输方案性能之间的关系。表明两种传输方案各有其适用性,可根据对性能的实际需求选择合适的传输方案。
压缩感知理论可以被用于解决信源采集设备计算资源受限的问题,但信号重构过程存在不确定性。传统的重构算法计算复杂度高,难以在实际中应用。近期,基于深度学习的重构算法打破传统算法的局限性,以其速度快、质量高等特点受到了广泛关注。现有的深度学习重构算法可以划分为“黑盒子”以及基于优化启发网络两种类型。与“黑盒子”式的网络结构相比,基于优化启发的深度网络更容易获得高精度的恢复,同时也更具可解释性。然而现有基于优化启发的图像压缩感知重构网络在每个优化阶段仅学习单一梯度,存在测量值信息利用不足、难以准确地学习梯度等缺点,限制了重构性能的提升。为了更充分地利用测量值信息,降低梯度学习的难度,本文提出了高维空间梯度学习思想,实现更准确的梯度回归。在此基础上,本文提出了特征域近端高维梯度下降(FPHGD)算法,并设计了实现该算法的深度神经网络(FPHGD-Net)以获得高精度图像重构结果。此外,本文设计了3种不同复杂度的深度空间近端映射网络结构,以满足不同的应用条件,按空间复杂度从低到高,相应模型分别为FPHGD-Net-Tiny、FPHGD-Net、FPHGD-Net-Plus。实验结果表明,与OPINE-Net+相比,所提3种模型在Set11数据上的平均PSNR分别提升1.34、1.51和1.88 dB,并且在重构视觉效果上,能够恢复出更丰富的图像细节。
在矿井提升机的制动控制中,制动瞬态冲击是影响矿井提升机安全可靠运行的关键问题。由于受到技术和经济成本的制约,目前包含贴闸/压紧的制动过程全程采用力闭环控制,这不可避免地导致闸瓦与闸盘刚性接触时的制动力瞬态冲击问题。针对矿井提升机制动瞬态冲击问题,文中提出了一种基于滞回切换原理的混合贴闸/压紧制动控制策略。首先,分别利用非奇异快速终端滑模控制和反步控制设计了贴闸和压紧控制器;其次,为达到快速贴闸的目的,设计了一种基于离散积分器的在线贴闸轨迹再规划方法,有效地减小了制动器贴闸时间;然后,为实现由贴闸控制到压紧控制的安全切换,利用滞回切换原理,制定了混合贴闸/压紧控制稳态切换策略,大大减小了制动力瞬态冲击;最后,为验证提出方法的有效性,选择传统全程力闭环控制策略C1与混合贴闸/压紧直接切换策略C2作为对比方法,在单绳缠绕式提升试验台进行了对比实验,从贴闸时间、制动力最大跟踪误差和提升钢丝绳最大张力3个方面对实验结果进行了分析。实验结果表明:相较于C1控制策略,提出制动控制策略的贴闸时间缩短了64.5%,钢丝绳张力峰值减小了41 N;相较于C2控制策略,提出制动控制策略的制动力冲击减小了90.3%,钢丝绳张力峰值减小了88 N。上述结果表明本文提出的方法能有效改善制动瞬态冲击,减小制动空动时间,提高制动系统安全性,同时本研究也为一类需要混合力/位置控制的电液伺服系统提供了一种有效的解决方法。
现有视频压缩感知重建网络通常利用光流网络实现像素域运动估计与运动补偿。然而在重建过程中,光流网络的输入为质量较差的初始估计帧,导致获得的光流不准确,基于光流的像素域对齐与融合操作会造成噪声的累积,导致视频重建帧存在明显的人工效应,影响重建质量。基于特征域多通道信息对干扰噪声具有较强的鲁棒性,文中将特征域优化思想应用于视频压缩感知重构神经网络的设计中,提出了特征域优化启发及光流引导的多假设交叉注意力重构神经网络(FOFMCNet)。为避免光流中的噪声在图像变形时破坏图像结构的问题,文中在特征域设计了光流指导的多假设运动估计模块与基于交叉注意力的运动补偿模块,以实现特征域的帧间运动估计与运动补偿,从而更为充分地利用帧间相关性辅助非关键帧重构。为了在特征优化过程中加强有效信息的复用,提升网络学习能力并缓解梯度爆炸问题,文中设计了特征域优化启发U型网络(FOUNet),并作为FOFMCNet的子网络,通过多个FOUNet的级联,FOFMCNet在特征域实现非关键帧的优化与重建。实验结果表明,文中所提算法在经典低分辨率数据集(UCF-101和QCIF)和新的高分辨率数据集(REDS4)上的重构结果均优于现有的视频压缩感知算法。
传统双模超声技术相较于新兴技术更具实现可穿戴化的潜力。在进行脉冲多普勒血流速度估计时,双模超声需同时发射B模式脉冲进行成像定位,这要求B模式脉冲和多普勒脉冲共享采样时间。采用基于单频多普勒脉冲的稀疏间隔发射方式可以解决这一问题,但常见的稀疏发射排布方式(如嵌套发射、互质发射等)存在采样时间窗较长的缺点,特别是在血流速度变化明显的情况下存在时间分辨率不足的问题。此外,长时间窗包含了较多的血流速度分量,容易由于稀疏采样引起伪影,从而影响血流速度估计的准确性。因此,文中提出了一种基于多频脉冲采样的新型血流速度估计方法。首先,构建了多频脉冲采样的回波模型,并对该模型进行推导,证明了在频率衰减平稳假设下,该数学模型等价于单频多普勒脉冲稀疏发射方式,即多频脉冲采样可以通过较短的时间窗实现类似于基于单频脉冲采样模式的长时间窗的性能,从而提高血流速度谱的时间分辨率和估计精度;然后,提出了两种可用于多频脉冲采样模式的血流速度谱的构建方法,分别为复杂度较低的BMUSIC算法和伪影抑制效果较佳的VMUSIC算法。基于Field Ⅱ仿真数据和人体实测数据的实验结果表明:相较于单频多普勒脉冲稀疏发射方式,文中方法不仅可以采用较短的时间窗提升血流速度谱的时间分辨率,还可以获得连续、清晰、精度较高且伪影抑制效果较佳的血流速度估计结果;在人体实测数据实验中,由于实验条件所限,文中方法无法实现非整数倍频,未能充分展现VMUSIC算法的性能优势。
近年来,注意力机制在图像分类、目标检测和语义分割等领域取得了巨大成功,但现有的注意力机制大多只能在通道或空间维度上实现特征融合,这极大限制了其在通道和空间维度上变化的灵活性,导致无法充分利用特征信息。为此,文中提出一种基于特征相似性和特征规范化的、可同时利用特征图各维度信息的卷积神经网络注意力模块FSNAM。该模块由特征相似性模块(FSM)和特征规范化模块(FNM)两部分组成,FSM利用输入特征图的通道特征信息和局部空间特征信息生成一个二维的特征相似性权重图;FNM利用输入特征图的全局空间特征信息生成一个三维的特征规范化权重图;两个模块生成的权重图融合在一起,生成一个三维的注意力权重图,以此实现通道特征信息和空间特征信息的融合。为证明FSNAM的可行性和有效性,进行了消融实验,结果表明:在图像分类任务方面,FSNAM模块对分类网络在CIFAR数据集上的性能提升明显优于其他主流注意力模块;在目标检测任务方面,使用FSNAM模块的目标检测网络对VOC数据集中的小目标和中等大小目标的检测准确率分别提高了3.9和1.2个百分点;在语义分割任务方面,使用FSNAM模块可以提高HRNet模型的性能,在SBD数据集上模型的平均像素准确率提高了0.58个百分点。
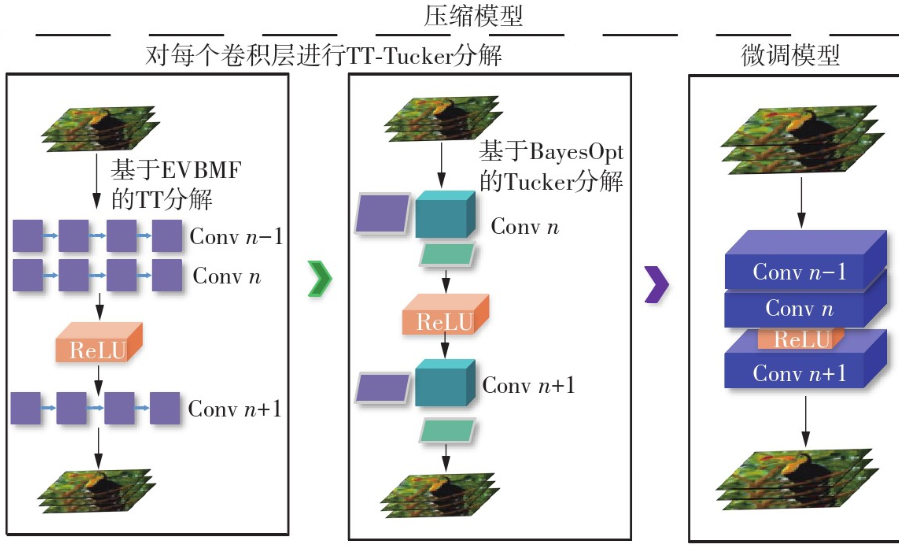
张量训练(TT)分解和Tucker分解是两种有效的卷积神经网络压缩方法。然而,TT和Tucker分解分别面临空间结构信息丢失与计算复杂度高等问题。为解决上述问题,文中考虑了网络结构的信息保留率和资源占用情况,采用学习-压缩(LC)算法的约束型压缩框架,提出了一种基于TT-Tucker分解的无预训练LC卷积神经网络压缩方法(TT-LC)。TT-LC方法包括学习步骤和压缩步骤两个部分。学习步骤不需要预训练过程,采用了指数循环学习率方法以提高训练准确率。而在压缩步骤,文中根据TT和Tucker分解的优点以及贝叶斯规则选取全局最优秩的特性,运用经验变分贝叶斯矩阵分解(EVBMF)和贝叶斯优化(BayesOpt)选出合理的秩以指导张量分解,采用TT-LC方法压缩训练后的模型。TT-LC方法既降低了空间结构信息丢失率和计算复杂度,又解决了张量的秩选取不合理导致模型准确率显著下降的问题,可实现模型的双重贝叶斯选秩和双重压缩,获得最优的压缩模型。最后,采用ResNets和VGG网络在CIFAR10与CIFAR100数据集上进行实验。结果表明:对于ResNet32网络,相比于基准方法,文中方法在准确率为92.22%的情况下,获得了69.6%的参数量压缩率和66.7%的浮点计算量压缩率。
人体网格重建(HMR)在人机交互和虚拟/增强现实等领域有广泛应用。为了进一步提高基于图像的人体网格重建中人体姿势和形状估计的精度,提出了基于混合逆运动学的全局一致性深度卷积神经网络,用于参数化人体网格重建(GloCoNet)。为了增强网络的全局一致性和全局上的长程依赖,该网络在特征提取网络基础上,设计了全局一致性增强器(GCB)模块,它能够增强模型对全局信息的感知能力和表达能力,并且使模型能够自适应地调整不同通道和空间位置的特征图权重。然后引入了多头注意力机制(MHSA)来捕获模型全局上的长程依赖,它可以帮助模型在处理长期依赖时更好地捕捉到关键的关系和模式,并建模全局上下文信息,从而更好的丰富特征子空间的多样性。同时,该网络采用混合逆运动学的方法弥合人体网格估计和3D人体关节点估计之间的差距,最终提升人体3D姿势和形状估计的准确度。实验结果表明,GloCoNet模型在公开的Human 3.6 M数据集上以平均每关节51.3 mm的位置误差(MPJPE)显著优于先前的主流方法。
针对非线性随机系统的概率密度函数(PDF)形状控制问题,文中以Fokker-Planck-Kolmogorov(FPK)方程为研究工具,提出了一种基于紧支撑多变量多项式(CSMP)函数的非线性随机系统PDF形状控制方法。当系统处于稳定状态时,系统的PDF被困在特定的紧凑子空间中,不需要对整个空间进行积分。而CSMP函数在一段连续的空间内非0,满足紧凑子空间的特征。因此,文中将CSMP的线性组合(CSMP-LC)作为FPK方程的稳态近似解逼近目标PDF。首先,采用飞蛾扑火优化(MFO)算法优化CSMP-LC函数的参数;然后,通过对多维稳态FPK方程的每一维状态变量进行积分,确保稳态FPK方程在整个空间中的积分为0;最后,求解出一维和二维非耦合的状态变量PDF形状控制器,并进行了仿真实验。结果表明,对于一维非线性随机系统,文中提出的方法能有效地实现对不同类型目标PDF形状(单峰形状、双峰形状、三峰形状)的控制,且在目标PDF形状为复杂的三峰时,文中方法的均值、方差、峰度和偏度误差均优于其他两种方法。文中方法扩展到二维状态变量非耦合的非线性随机系统时,也能较好地实现对PDF形状的控制,为多变量随机系统的PDF形状控制研究提供了新的思路。同时,CSMP函数可以减少积分计算的复杂性,降低了非线性随机系统的PDF形状控制器的求解难度。


 2024年电子、通信与自动控制技术
2024年电子、通信与自动控制技术
