华南理工大学学报(自然科学版) ›› 2024, Vol. 52 ›› Issue (10): 1-8.doi: 10.12141/j.issn.1000-565X.230696
所属专题: 2024年电子、通信与自动控制技术
• 电子、通信与自动控制 • 下一篇
eVTOL飞行器冗余捷联惯性导航信息融合研究
胡青春1 黄思1 陈兴彬1,2 张宁3 苏庆鹏3
- 1.华南理工大学 机械与汽车工程学院, 广东 广州 510640
2.广东省生产力促进中心, 广东 广州 510700
3.广州汽车集团股份有限公司 汽车工程研究院, 广东 广州 511434
Research on Redundant Strapdown Inertial Navigation Information Fusion for eVTOL Aircraft
HU Qingchun1 HUANG Si1 CHEN Xingbin1,2 ZHANG Ning3 SU Qingpeng3
- 1.School of Mechanical and Automotive Engineering,South China University of Technology,Guangzhou 510640,Guangdong,China
2.Guangdong Productivity Promotion Center,Guangzhou 510700,Guangdong,China
3.Automotive Engineering Institute,Guangzhou Automobile Group Co. ,Ltd. ,Guangzhou 511434,Guangdong,China
摘要:
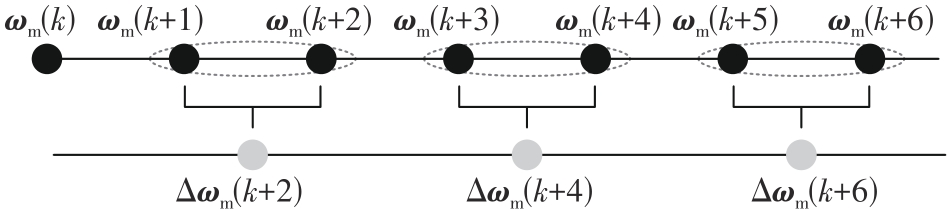
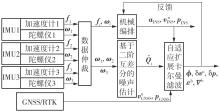
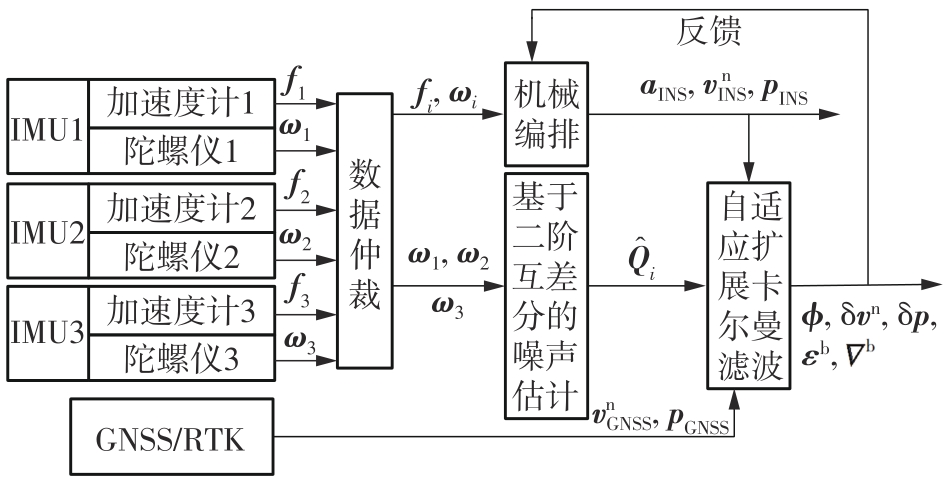
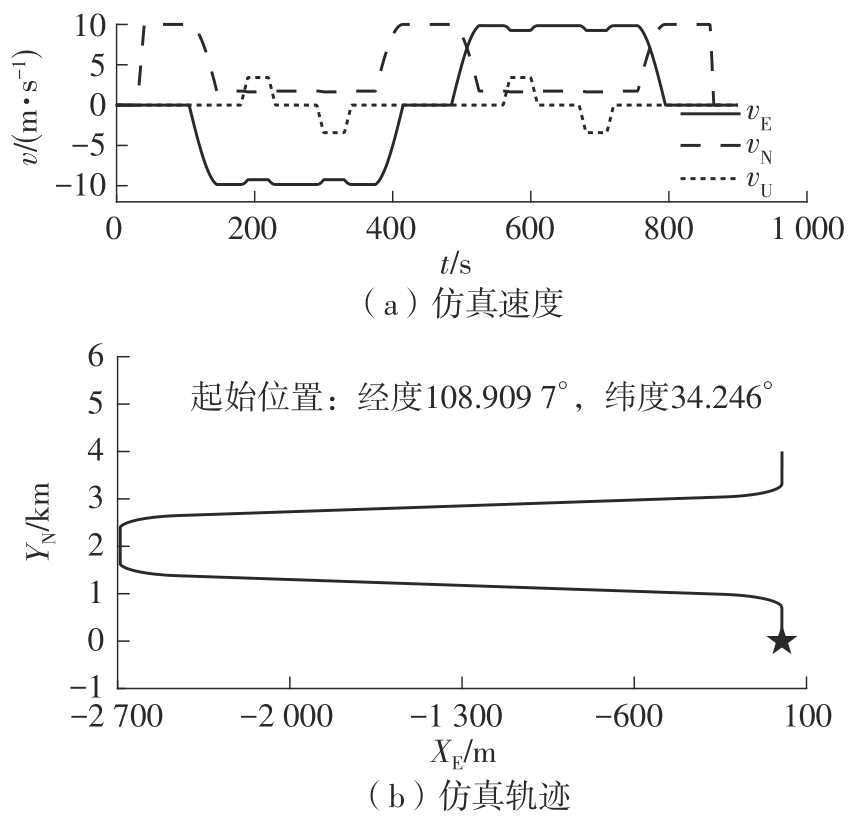
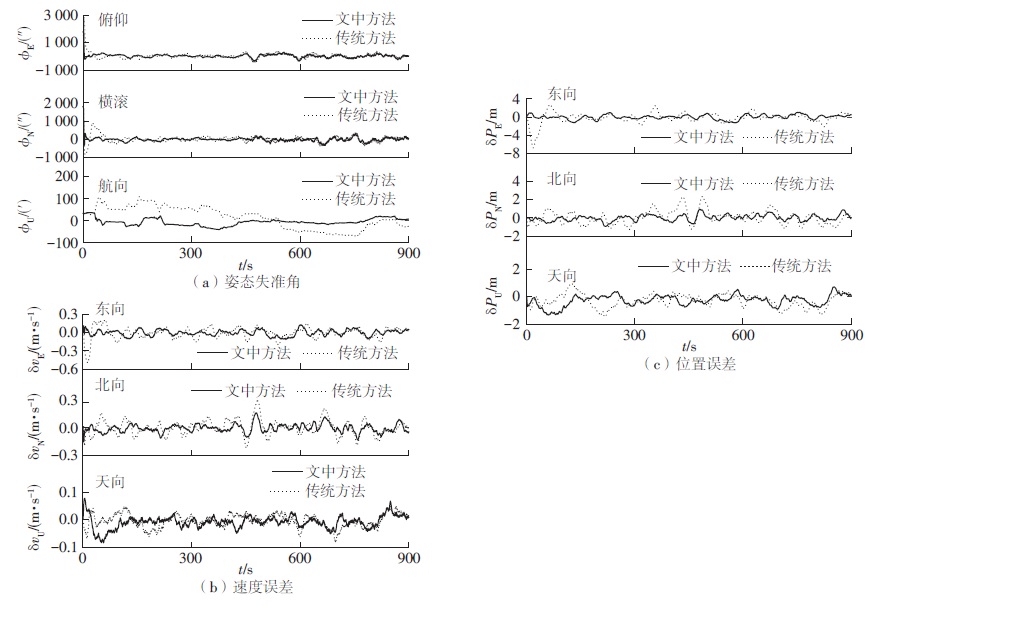
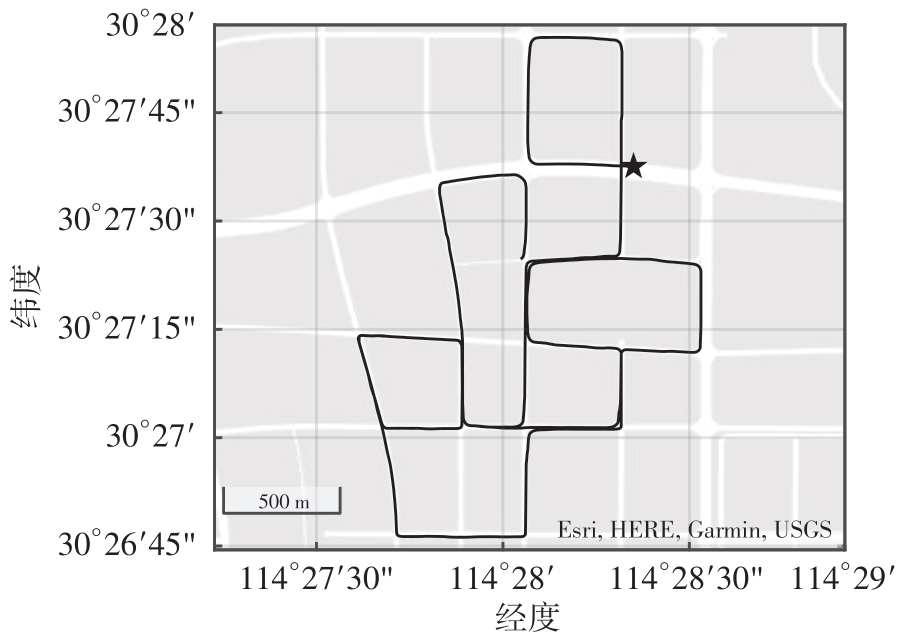
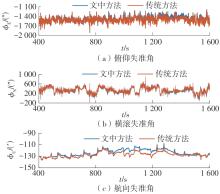
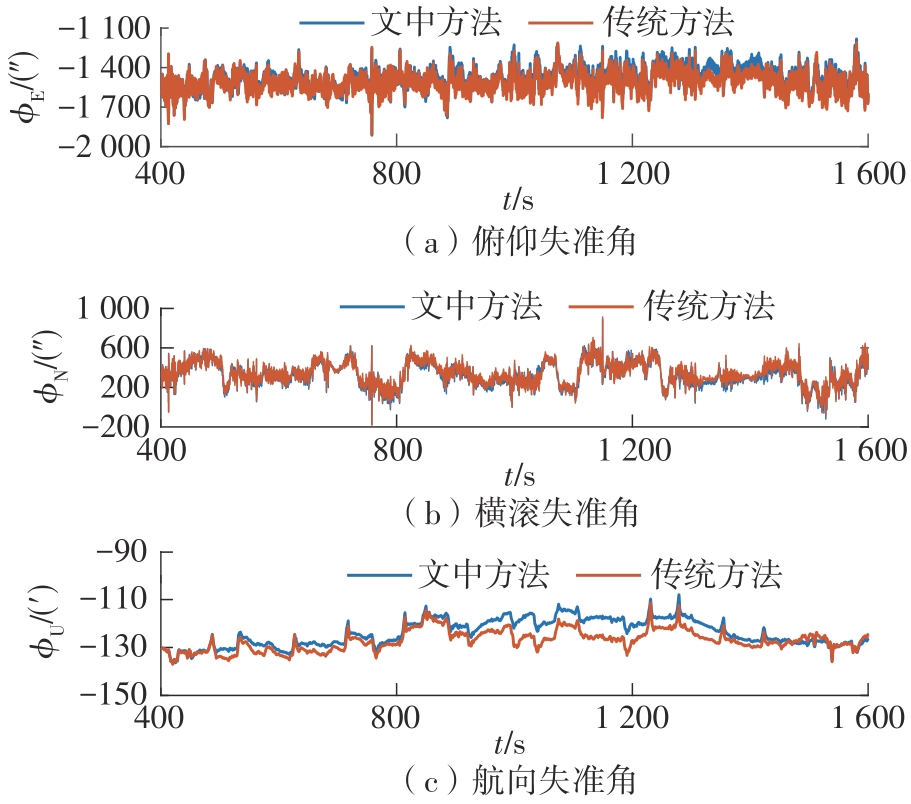
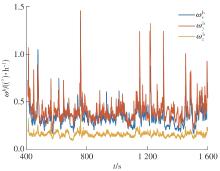
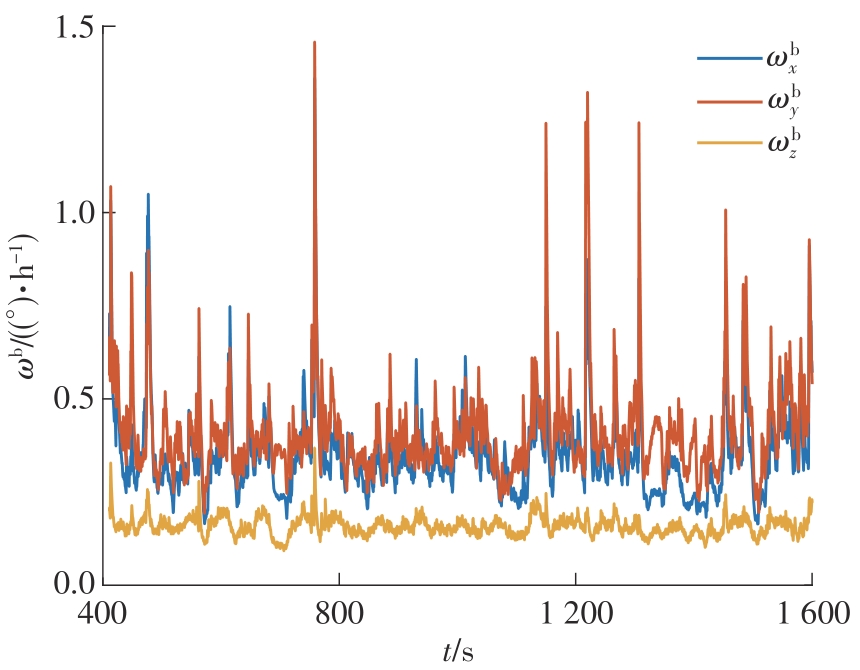
电动垂直起降(eVTOL)飞行器的运用,作为一种未来城市交通的潜在解决方案,具有缓解城市交通拥堵和提高空中交通效率的巨大潜力。在其常用的导航系统中,通常采用组合导航和传感器余度技术来提高系统可靠性与安全性。然而,在当前导航系统的传感器余度技术中,冗余传感器只起到备份数据的作用,导致测量数据的信息利用率不高。为解决这一问题,文中以三余度的捷联惯性导航系统(SINS)和全球导航卫星系统(GNSS)的组合导航系统为研究对象,提出了一种基于二阶互差分和惯性传感器(IMU)冗余信息的陀螺仪噪声实时估计方法,推导了在二余度和三余度情况下陀螺仪噪声估计的递推式;在获得陀螺仪的噪声估计值后,采用自适应扩展卡尔曼滤波方法将SINS和GNSS的导航信息进行融合,以提高组合导航系统的准确性和鲁棒性。通过对SINS/GNSS组合导航系统进行仿真和真实跑车实验,结果表明:文中方法能够准确估计陀螺仪噪声;相较于传统融合方法,引入陀螺仪噪声实时估计后,组合导航系统的导航精度和抗干扰能力得到了提高,具有实际的工程意义。
中图分类号: