2024 Electronics, Communication & Automation Technology
The traditional dual-mode ultrasound technology has greater potential for wearable implementation compared to the other emerging technologies. During pulse Doppler blood flow velocity estimation, dual-mode ultrasound needs to emit B-mode pulses simultaneously for imaging localization, which requires that B-mode pulses and Doppler pulses share sampling time. This issue can be addressed by using a sparse interval emission method based on single-frequency Doppler pulses. However, common sparse emission arrangements (such as nested emission, coprime emission, etc.) have the disadvantage of a long sampling time window. Especially, there is the problem of insufficient temporal resolution with significant changes in blood flow velocity. In addition, a longer time window contains more blood flow velocity components, which is prone to artifacts caused by sparse sampling, thereby affecting the accuracy of blood flow velocity estimation. Therefore, this paper proposed a novel blood flow velocity estimation method based on multi-frequency pulse sampling. Firstly, a multi-frequency pulse sampling echo model was constructed and derived. It is proved that under the assumption of stationary frequency band attenuation, this mathematical model is equivalent to the spare interval emission method of single-frequency Doppler pulses. That is, the multi-frequency pulse sampling can achieve performance similar to that of the long time window of the single-frequency pulse sampling mode through a shorter time window, thereby improving the temporal resolution and estimation accuracy of the blood flow velocity spectrum. Subsequently, this paper proposed two methods for constructing the blood flow velocity spectrum for multi-frequency pulse sampling mode, namely the BMUSIC algorithm with lower complexity and the VMUSIC algorithm with better artifact suppression effect. The experimental results based on Field Ⅱ simulation data and in vivo data show that, compared with the sparse emission method of single-frequency Doppler pulses, the proposed method in this paper can not only use a shorter time window to improve the temporal resolution of the blood flow velocity spectrum, but also obtain continuous, clear, high-precision, and better artifact suppression effect of blood flow velocity estimation results. In the experiments with in vivo data, due to the limitation of experimental constraints, the proposed method cannot achieve non-integer multiples of frequency, and the performance advantage of the VMUSIC algorithm is not fully demonstrated.
The existing video compressive sensing reconstruction network usually uses the optical flow network to achieve pixel domain motion estimation and motion compensation. However, during the reconstruction process, the input of the optical flow network is the estimated frame with poor quality, resulting in inaccurate optical flow. The optical flow-based pixel domain alignment and fusion operation will cause noise accumulation, lead to obvious artificial effects in video reconstruction frames and affect the reconstruction quality. Based on the fact that multi-channel information in the feature space has strong robustness to interference noise, this paper applied the idea of feature space optimization to the design of the video compressive sensing reconstruction neural network, and proposed a feature-space optimization-inspired and flow-guided multi-hypothesis cross-attention network (FOFMCNet). To avoid the image structure destruction caused by the noise in the optical flow when warping the image, the study designed multi-hypothesis motion estimation module guided by optical flow and the motion compensation module based on cross-attention to realize the motion estimation and motion compensation of inter-frame in feature space, so as to make full use of inter-frame correlation to assist non-key frame reconstruction. In order to strengthen the reuse of effective information in the process of feature optimization, improve the learning ability of the network and alleviate the problem of gradient explosion, this paper designed a feature-space optimization-inspired u-shape network (FOUNet) as a sub-network of FOFMCNet. Through the cascade of multiple FOUNets, the FOFMCNet realizes the optimization and reconstruction of non-key frames in the feature space. Experimental results show that the reconstruction results of the proposed algorithm are obviously better than those of the existing video compression sensing algorithms on the classical low-resolution dataset (UCF-101 and QCIF) and new high-resolution dataset (REDS4).
As a potential solution for future urban transportation, the using of electric vertical takeoff and landing (eVTOL) aircraft, has great potential to alleviate urban traffic congestion and improve air traffic efficiency. In its commonly used navigation systems, integrated navigation and sensor redundancy technology are usually used to improve system reliability and safety. However, in the current sensor redundancy technology of navigation systems, redundant sensors only serve as data backup, resulting in insufficient information utilization of measurement data. To address this issue, this paper took the integrated navigation system of a triple redundant strapdown inertial navigation system (SINS) and a global navigation satellite system (GNSS) as the research object and proposed a real-time estimation method for gyroscope noise based on second-order differencing and redundant information of the inertial measurement unit (IMU). It derived recursive expressions for gyroscope noise estimation in the case of two and three redundancies. After obtaining the estimated noise value of the gyroscope, the navigation information of SINS and GNSS was fused to improve the accuracy and robustness of the integrated navigation system. Through simulation and real sports car tests on the SINS/GNSS integrated navigation system, the results show that the method proposed in this paper can accurately estimate gyroscope noise. Compared with traditional fusion methods, the navigation accuracy and anti-interference ability of the combined navigation system are improved after introducing the real-time estimation of gyroscope noise, which has practical engineering significance.
In recent years, attention mechanisms have achieved great success in the fields of image classification, object detection and semantic segmentation. However, most existing attention mechanisms can only achieve feature fusion in channel or spatial dimensions, which greatly limits the flexibility of attention mechanisms to change in channel and spatial dimensions and cannot fully utilize feature information. To address this issue, this paper proposes a convolutional neural network attention module based on feature similarity and feature normalization (FSNAM), which can utilize the characteristic information of both channel domain and spatial domain. FSNAM consists of a feature similarity module (FSM) and a feature normalization module (FNM). FSM generates a two-dimension feature similarity weight map using the channel feature information and local spatial feature information of the input feature map, while FNM generates a three-dimension feature normalization weight map using the global spatial feature information of the input feature map. The weight maps generated by FSM and FNM are fused to generate a three-dimension attention weight map to achieve the fusion of channel feature information and spatial feature information. Moreover, to demonstrate the feasibility and effectiveness of FSNAM, ablation experiments are conducted. The results show that, for image classification tasks, FSNAM significantly outperforms other mainstream attention modules in improving the performance of the classification network on CIFAR dataset; for object detection tasks, the object detection network using FSNAM improves the detection accuracy of small and medium-sized objects in VOC dataset by 3.9 and 1.2 points of percentage, respectively; and, for semantic segmentation tasks, FSNAM can significantly improve the performance of HRNet model, and helps to achieve an average pixel accuracy increase of the model on SBD dataset of 0.58 points of percentage.
With the development of robotics technology, humanoid robots have shown application potential and value in multiple fields. Research on autonomous grasping of humanoid robots based on machine vision aims to improve their grasping adaptability and humanoid actions in natural environments. In terms of machine vision, the Realsense-D435 depth camera was adopted, and the YOLO (You Only Look Once) object detection model was used to achieve target object recognition, spatial positioning, depth map cropping, and target point cloud generation. The object’s posture was obtained based on the registration algorithm (ICP) between the target point cloud and the standard point cloud. The robot head was modeled using the D-H method, and the position and posture of the object were converted from the camera coordinate system to the robot coordinate system. In terms of motion planning, according to the grasping law of the human arm, the grasping process was divided into 9 basic actions: initial position, moving to the pre-grasping position, grasping the object, lifting the object, moving the object, moving to placement position placing the object, retreating position, and returning to the initial position. Corresponding grasping postures were determined for different objects to improve the success rate of grasping. Based on the grasping and placing points obtained visually, the remaining key points were calculated independently, and the spatial arc was used as the grasping trajectory. Through Matlab simulation, the rationality of the end movement trajectory and joint trajectory of the robotic arm during the grasping process was verified. Finally, an object grasping experiment was conducted, and the results showed that the humanoid robot can quickly and accurately recognize and locate different objects in the natural environment, and can successfully grasp and transport them with a success rate of over 80%. And it takes into account the imitation of human nature of the action, verifying the effectiveness of the proposed solution. This study can promote the application and popularization of humanoid robots in human daily life.
For the probability density function (PDF) shape control problem of nonlinear stochastic systems, this paper used the Fokker-Planck-Kolmogorov (FPK) equation as a tool and proposed a PDF shape control method based on the compactly supported multivariable polynomials (CSMP) function. When the system is in a steady state, the PDF of the system was trapped in a specific compact subspace and didn’t need to be integrated over the whole space. The CSMP function is non-zero in a continuous space, satisfying the compact subspace characteristic. Therefore, the linear combination of CSMP (CSMP-LC) was utilized as the steady-state approximate solution of FPK equation for approaching the target PDF. Firstly, the moth-flame optimization (MFO) algorithm was used for optimizing parameters of the CSMP-LC function. Then, by integrating each dimensional state variable of the multidimensional steady-state FPK equation, the integration of the steady-state FPK equation over the whole space was ensured to be zero. Finally, the solution of the one-dimensional and two-dimensional uncoupled state variable PDF shape controller was completed, and simulation experiments were conducted. The results demonstrate that the proposed method can achieve PDF shape control for different types of target PDFs (single-peaked shapes, double-peaked shapes and triple-peaked shapes) for one-dimensional nonlinear stochastic systems. In particular, for complex triple-peaked shapes, it has a significant advantage over the multi-Gaussian closure method and the exponential polynomial method. The method in the paper was extended to the nonlinear stochastic system with uncoupled two-dimensional state variables, which can better realize the control of PDF shape and provide a new research idea for the study of PDF shape control of multivariate stochastic systems. Moreover, the CSMP function can reduce the complexity of the integral computation and reduce the difficulty of solving PDF shape controllers for nonlinear stochastic systems.
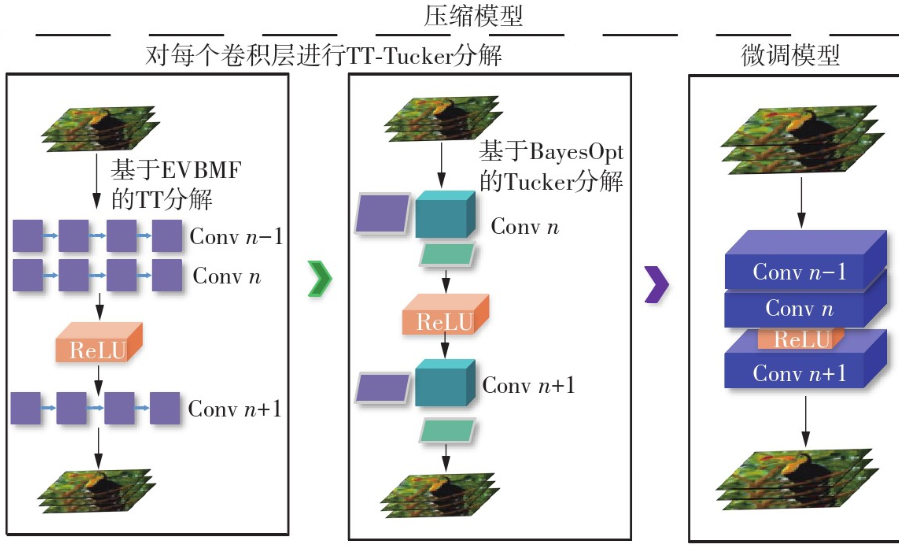
Tensor training (TT) decomposition and Tucker decomposition are two effective compression methods for convolutional neural networks. However, TT and Tucker decomposition face the problems of spatial structure information loss and high computational complexity respectively. To solve the above problems, this paper considered the information retention rate and resource occupancy of the network structure and proposed a LC convolutional neural network compressed method (TT-LC) without pre-training based on TT-Tucker decomposition, adopting the learning-compression (LC) algorithm constraint compression framework. The TT-LC method includes two parts: learning step and compression step. The learning step didn’t not need the pre-training process, and adopted the exponential cyclic learning rate method to improve the training accuracy. In the compression step, this paper selected the global optimal rank according to the advantages of TT and Tucker decomposition and the characteristics of Bayes rule, and used empirically variable Bayesian matrix factorization (EVBMF) and Bayesian optimization (BayesOpt) to select reasonable ranks to guide tensor decomposition. The TT-LC method was used to compress the trained model. TT-LC method not only reduces the loss rate of spatial structure information and computational complexity, but also solves the problem that the unreasonable rank selection of the tensor leads to the significant decrease in model accuracy. It can realize the double Bayesian rank selection and double compression of the model, and obtains the optimal compression model. Finally, experiments were carried out on CIFAR10 and CIFAR100 datasets using ResNets and VGG networks. The results show that for ResNet32 network, compared with the benchmark method, the proposed method achieved a compression rate of parameter quantity of 69.6% and a floating point computation compression rate of 66.7% with the accuracy of 92.22%.
Human body mesh reconstruction (HMR) has wide applications in human-computer interaction, virtual/augmented reality, and other fields. In order to further improve the accuracy of human body pose and shape estimation in image-based human body mesh reconstruction, this study proposed a parametric human body mesh reconstruction network based on hybrid inverse kinematics and global consistency deep convolutional neural network, called GloCoNet. To enhance the network’s global consistency and long-range dependencies, a Global Consistency Booster (GCB) module was designed on top of the feature extraction network. It can enhance the model’s perception and expression capabilities of global information, and allow the model to adaptively adjust the feature map weights of different channels and spatial positions. Furthermore, a multi-head attention mechanism was introduced to capture the model’s long-range dependencies globally, helping the model better capture key relationships and patterns when dealing with long-term dependencies, and modeling global contextual information to enrich the diversity of feature subspaces. Meanwhile, the network adopts a hybrid inverse kinematics approach to bridge the gap between human body mesh estimation and 3D human joint estimation, ultimately improving the accuracy of human 3D pose and shape estimation. Experimental results show that the GloCoNet model significantly outperforms previous mainstream methods with an average per joint position error of 51.3 mm on the publicly available Human3.6M dataset.
Automatic detection of epilepsy based on electroencephalogram (EEG) signals is greatly helpful for clinical diagnosis and treatment of epilepsy. Most epilepsy detection algorithms ignore the temporal relation of EEG signals, therefore, this paper proposed an epilepsy EEG signal classification method based on multi-band path signature features. Firstly, EEG signals were decomposed into five frequency bands. Secondly, features were extracted using the path signature (PS) algorithm. Thirdly, features were fused after local principal component analysis (LPCA) removed the feature’s correlation. Finally, an ensemble classifier was used to predict epilepsy. Since the path signature can dig into the correlation of EEG signals, combined with local principal component analysis, the method proposed in the paper can obtain more discriminative epilepsy classification features.The comparative experiments of 10-fold cross-validation were conducted to validate this method on two datasets, i.e., the private dataset from a local hospital with more than 2 000 seconds of segments and the CHB-MIT epilepsy dataset. The results show that the average classification accuracy of the method reached 97.25% on the private dataset, which is higher than those of the classical EMD (Empirical Mode Decomposition) method and the up-to-date LSTM (Long Short-term Memory Network) + CNN (Convolutional Neural Network) method by 3.44 and 1.35 percentage points respectively. Moreover, the proposed method can achieve an average classification accuracy of 98.11% on the CHB-MIT dataset, which is higher than those of the classical EMD method and the up-to-date LSTM+CNN method by 5.20 and 2.64 percentage points respectively, and this method achieves the best classification accuracy than other methods on both datasets.
The region between gate and source/drain is called source/drain access region resistances (RD,S) in GaN HEMT equivalent circuit model. Accurately constructing the source/drain access region resistance (RD,S) model is of great significance for analyzing the DC and RF characteristics and building a comprehensive large-signal model for GaN HEMTs. This paper presented an RD,S model considering self-heating and quasi-saturation effects. Firstly, the nonlinear self-heating effect model was derived based on the relationship between the temperature of the source/drain access region (TCH) and the dissipated power (Pdiss). Furthermore, based on the quasi-saturation effect and Trofimenkoff model, a nonlinear RD,S model was constructed. Under low bias conditions, the decrease of 2DEG and mobility with increasing TCH results in the increase of RD,S with TCH at ambient temperatures (Tamb) ranging from 300 to 500 K. At constant Tamb, RD,S presented a nonlinear increasing trend with the increase of bias. The results show that the average relative errors of the RD models in this paper and in the literature are 0.32% and 1.78% respectively, and the root mean square errors (RMSE) are 0.039 and 0.20 Ω respectively. The mean relative errors of RS model are 0.76% and 1.73% respectively, and RMSE are 0.023 and 0.047 Ω respectively. Compared with the experimental data reported in the literature, the results show that the average relative errors of the RD model in this paper and that in the literature are 0.91% and 1.59% respectively, and the RMSE are 0.012 and 0.015 Ω respectively. The mean relative errors of RS are 1.22% and 2.77% respectively, and RMSE were 0.001 5 and 0.003 4 Ω respectively. The proposed model with lower mean relative error and root mean square error, is able to more accurately characterize the variation of RD,S with the drain-source current (IDS) in the linear operating region of GaN HEMTs. This model can be used for the design optimization of the device or as a Spice model for circuit simulation.
In the braking control for mine hoists, braking transient impact is a key issue affecting the operational safety and reliability of mine hoists. Currently, due to the constraints of technology and economic costs, the braking process, including shoe-approaching and braking control, adopts force closed-loop control mode, which inevitably leads to the transient impact of braking pressure when the brake shoe is in rigid contact with the brake disc. Aiming at the problem of transient braking impact for mine hoists, this paper designed a hybrid shoe-approaching and braking control strategy by using the hysteretic-relay-based switching principle. Firstly, the non-singular fast terminal sliding mode control and backstepping control were adopted to design the controller for the shoe-approaching and braking system, respectively. Secondly, in order to achieve the purpose of fast shoe-approaching, it developed an online shoe-approaching trajectory re-planning method based on discrete integrator, which effectively reduces the shoe-approaching time of the system. Then, by using of the hysteretic switching principle, it developed an autonomous switching strategy from shoe-approaching control to braking control, which greatly reduces the transient impact of braking pressure. Finally, to verify the effectiveness of the proposed method, the traditional full-stroke pressure closed-loop control strategy C1 and hybrid shoe-approaching/pressure control strategy with direct switching C2 were selected as comparison methods, and comparative experiments were conducted on a single-rope winding hoisting test bench. The experimental results were analyzed from three aspects: braking time, maximum tracking error of braking force, and maximum tension of hoisting wire rope. The experimental results indicate that, compared with the C1 control strategy, the proposed braking control strategy reduces the braking time by 64.5% and the peak tension of the wire rope by 41 N. Compared with the C2 control strategy, the proposed braking control strategy reduces the braking force impact by 90.3% and the peak tension of the wire rope by 88 N. These results demonstrate that the proposed approach effectively improves the transient impact of braking, reduces shoe-approaching time, and improves the safety of the braking system. This study also provides an effective solution for a class of electro-hydraulic servo systems that require mixed force/position control.
With the innovation of space technology, the demand for low earth orbit communication is increasing year by year. Low earth orbit satellites produced in this context are mainly used in remote sensing detection, weather forecasting and data communication fields. Because the earth surface covered by the antenna beam of low earth orbit satellite is spherical, the beam is usually designed as the equal flux form. Because of the problems of polarization mismatch and multipath effect in satellite communication, choosing multipolarization rather than circular polarization as the working state of low earth orbit satellite antenna can better adapt to the complex working environment and ensure the quality of communication. The combination of equal flux beam antenna and multipolarization reconfigurable technology has great application prospects. Based on the design principle of synthesizing linearly polarized waves from a pair of orthogonal circularly polarized waves, a multi-polarization reconfigurable antenna with isoflux beam was proposed in this paper. The antenna consists of a reconfigurable feeding network and a septum polarizer circular waveguide with choke rings. By changing the working states of SP4T switch and SP2T switches embedded in the feeding network, the feeding network will provide different feeding conditions to the circular waveguide, and the antenna can be reconfigured with two kinds of circular polarizations and two kinds of linear polarizations under the action of the septum in the circular waveguide. In addition, the beamforming was realized by introducing choke rings and T-shaped slots structures into the circular waveguide,which ensures that the antenna radiates isoflux pattern under different polarization states. The measured results show that the overlapping impedance bandwidth of -15 dB is 14.7%, covering 4.80~5.56 GHz, and the top of the radiation pattern has a flat effect in the range of θ from -24° to +24°. In the circular polarization states, the spatial axis ratio covers from -51° to +50°, and the coverage range is larger than the flat range at the top of the pattern. The measured results are in good agreement with the simulation results, and the antenna has the advantages of multi-polarization and flat top of the pattern, which can meet the needs of multi-polarization application scenarios in mobile communication and satellite communication.
Compressed sensing theory can be used to solve the problem of limited computing resources of information source acquisition equipment, but there is uncertainty in the signal reconstruction process. Traditional reconstruction algorithm is difficult to be applied in practice because of its high computational complexity. Recently, the reconstruction algorithm based on deep learning has broken the limitation of traditional algorithms, and has attracted wide attention with its fast reconstruction speed and high quality. Existing deep learning reconstruction algorithms can be divided into two types: “black box” and optimization-based inspired network. Compared with the “black box” network structure, the optimization-inspired deep network is easier to obtain high-precision recovery and more interpretable. However, the existing image compressed sensing reconstruction optimization-inspired networks only learn a single gradient in each optimization phase and has shortcomings such as insufficient use of measured information and difficulty in learning gradients, limiting the improvement of reconstruction performance. In order to make full use of the measurement and reduce the difficulty of gradient learning, the idea of high-dimensional space gradient learning was proposed to achieve more accurate gradient regression. On this basis, this paper proposed Feature-domain Proximal High-Dimensional Gradient Descent (FPHGD) algorithm, and designed a Feature-domain Proximal High-dimensional Gradient Descent Network (FPHGD-Net) to realize this algorithm, so as to obtain high-precision image reconstruction. In addition, three kinds of deep space proximal mapping network structures with different complexity were designed to meet different application. According to the spatial complexity from low to high, the corresponding models are respectively called FPHGD-Net-Tiny, FPHGD-Net and FPHGD-Net-Plus. Extensive experiment shows that, compared with OPINE-Net+, the average PSNR of the three proposed models on Set11 increase 1.34, 1.51 and 1.88 dB, and recover richer image details in the reconstruction of visual effects.
Due to the shortage of low-frequency resources, the future mobile communication network will gradually shift to higher frequency bands. The free space propagation loss, diffraction loss and penetration loss of electromagnetic waves are large, so it is easy to produce coverage blind spots and weak coverage areas. Reconfigurable Intelligent Surface (RIS) has become a new hot spot to solve the coverage problem of dense urban agglomerations by reconfiguring the propagation environment of signals to improve network performance and expand network coverage. Based on the multi-hop communication mode of the next generation mobile communication network with RIS participation in dense urban agglomerations, the multi-hop RIS transmission scheme was compared with a proposed decode-and-forward (DF) relay-assisted multi-hop RIS transmission scheme (DF-RIS). Firstly, the transmission loss, energy efficiency and system capacity of the two transmission schemes were theoretically derived and analyzed. Secondly, the simulation was carried out in the three-dimensional environment model of dense urban agglomeration. In order to improve the problem of reducing the efficiency of complex environment search and increasing the amount of calculation, an improved Lazy Theta * algorithm was proposed, and the search time and search path length of the improved algorithm and the common path search algorithm were simulated and compared. The improved algorithm was used to select the nodes required by the two transmission schemes in the same simulation environment. The different locations of the DF relay in the multi-hop DF-RIS transmission scheme were considered in the node selection. After determining the nodes, the transmission loss, energy efficiency and system capacity of the two transmission schemes were simulated and compared. The simulation results not only verify the effectiveness of the improved Lazy Theta * algorithm, but also illustrate the relationship between the number of RIS reflection elements and the performance of the two transmission schemes. It shows that the two transmission schemes have their own applicability, and the appropriate transmission scheme can be selected according to the actual requirements for performance.
Channel estimation is a key technology in communication systems, which involves evaluating the channel characteristics experienced by signals during transmission, so that the receiver can effectively process and recover the received signals. In order to improve the quality of the communication system under the LOS channel occlusion communication, this study used an intelligent hypersurface to assist the existing communication system. In the smart hypersurface assisted wireless communication system, in addition to the line of sight channel between the base station and the user, there are also cascaded channels from the base station to the smart hypersurface and from the smart hypersurface to the user. The current channel estimation methods basically use traditional algorithms to estimate. In order to solve the problems of low accuracy and high computational complexity of the cascaded channel estimation with complex statistical distribution in the intelligent hypersurface assisted multi-user system, this paper proposed a channel estimation algorithm based on the combination of traditional algorithm and deep learning algorithm. The interpretability of traditional algorithms and the high performance of deep learning algorithms were utilized. On the basis of convolutional network, a denoising method based on residual dense network (RDN) was proposed. Firstly, the data set of the real environment was generated according to the simulation of the system parameters. And the traditional least squares (LS) method was used to rough estimate the channel, and the channel was regarded as a two-dimensional noisy image. Secondly, dense blocks (RDB) were used to fully extract the local features of noise data, and multi-channel convolution and residual network were used to fuse the data features. Finally, the trained model was used to estimate the data online and obtain the denoising channel. The proposed algorithm was verified from the channel estimation accuracy, and theoretical formula derivation and system simulation analysis were carried out on the Rician channel model. Simulation results show that the proposed algorithm improves the accuracy of channel estimation compared with the traditional algorithm.
 2024 Electronics, Communication & Automation Technology
2024 Electronics, Communication & Automation Technology
