Journal of South China University of Technology(Natural Science Edition) ›› 2024, Vol. 52 ›› Issue (4): 51-58.doi: 10.12141/j.issn.1000-565X.230368
• Mechanical Engineering • Previous Articles Next Articles
Trajectory Friction Compensation Algorithm for Robots Based on Velocity Control
YE Bosheng LI Siao TAN Shuai LI Xiaokun JIN Xiongcheng SHAO Baiyan
- School of Mechanical Science and Engineering,Huazhong University of Science and Technology,Wuhan 430074,Hubei,China
-
Received:2023-05-31Online:2024-04-25Published:2023-11-08 -
About author:叶伯生(1966-),男,博士,副教授,主要从事机器人控制技术、数控技术研究。E-mail:yebosh@hust.edu.cn -
Supported by:the Key R&D Program of Hubei Province(2021BAA197)
CLC Number:
Cite this article
YE Bosheng, LI Siao, TAN Shuai, et al. Trajectory Friction Compensation Algorithm for Robots Based on Velocity Control[J]. Journal of South China University of Technology(Natural Science Edition), 2024, 52(4): 51-58.
share this article

Fig.1
Flowchart of dynamic parameter identification based on LM method"

Table 1
Coefficients of the optimal excitation trajectory"
| i | qi,0/rad | ai,1/rad | ai,2/rad | ai,3/rad | ai,4/rad | ai,5/rad | bi,1/rad | bi,2/rad | bi,3/rad | bi,4/rad | bi,5/rad |
|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 0.544 5 | 0.199 8 | -0.226 6 | 0.448 1 | -0.003 7 | 0.478 5 | 0.065 8 | 0.174 9 | 0.188 4 | -0.426 1 | 0.144 7 |
| 2 | 0.772 2 | -0.364 4 | -0.717 4 | 0.338 1 | 0.209 4 | 0.534 3 | -0.167 9 | 0.658 5 | 1.063 1 | 0.060 3 | -0.915 9 |
| 3 | -3.140 0 | 0.649 4 | 0.993 2 | 0.316 1 | -0.780 3 | -1.178 4 | 0.181 1 | -0.251 7 | -0.779 0 | 0.472 9 | 0.153 5 |
| 4 | 0.410 5 | 0.284 1 | -0.076 5 | -0.068 6 | -0.169 4 | 0.030 4 | -0.198 5 | -0.101 7 | 0.014 7 | 0.048 4 | 0.032 9 |
| 5 | -2.862 6 | 0.542 9 | 0.683 8 | -0.634 3 | -0.754 0 | 0.151 6 | 0.089 3 | -1.252 3 | -0.491 7 | -0.529 9 | 1.202 0 |
| 6 | -1.429 5 | 0.253 9 | 0.394 3 | -0.598 5 | 0.004 9 | -0.054 6 | 0.333 9 | -0.295 6 | -0.758 1 | -0.423 7 | 0.845 3 |

Fig.2
Optimal excitation trajectory in robot joint space"


Fig.3
Optimal excitation trajectory in Cartesian space"


Fig.4
Comparison of robot joint currents before and after filtering"

Table 2
Minimum sets of dynamics parameters for robot based on LM method"
| i | Pr矩阵元素值 | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 12i+11) | 12i+21) | 12i+31) | 12i+41) | 12i+51) | 12i+61) | 12i+71) | 12i+81) | 12i+91) | 12i+101) | 12i+111) | 12i+121) | |
| 0 | -0.422 3 | 0.417 1 | -0.002 7 | 0.053 5 | 0.095 6 | -0.301 6 | -0.516 6 | 0.012 8 | 0.209 7 | 0.034 4 | 0.034 4 | 0.020 7 |
| 1 | -0.036 7 | -0.278 6 | 0.002 4 | 0.066 5 | -0.024 6 | 0.008 8 | -0.004 1 | 0.011 4 | -0.000 5 | 0.022 4 | 0.018 1 | -0.000 9 |
| 2 | -0.000 6 | 0.033 2 | 0.003 6 | 0.000 3 | 0.004 1 | -0.013 8 | -0.001 3 | 0.004 8 | 0.001 2 | 0.006 2 | 0.000 3 | -0.000 2 |
| 3 | 0.060 2 | 0.016 1 | 0.591 6 | -0.037 3 | 0.143 6 | -0.146 6 | 0.010 1 | 0.002 9 | 0.013 2 | -0.004 2 | 0.002 7 | 0.000 8 |

Fig.5
Comparison of parameter identification of joint current"
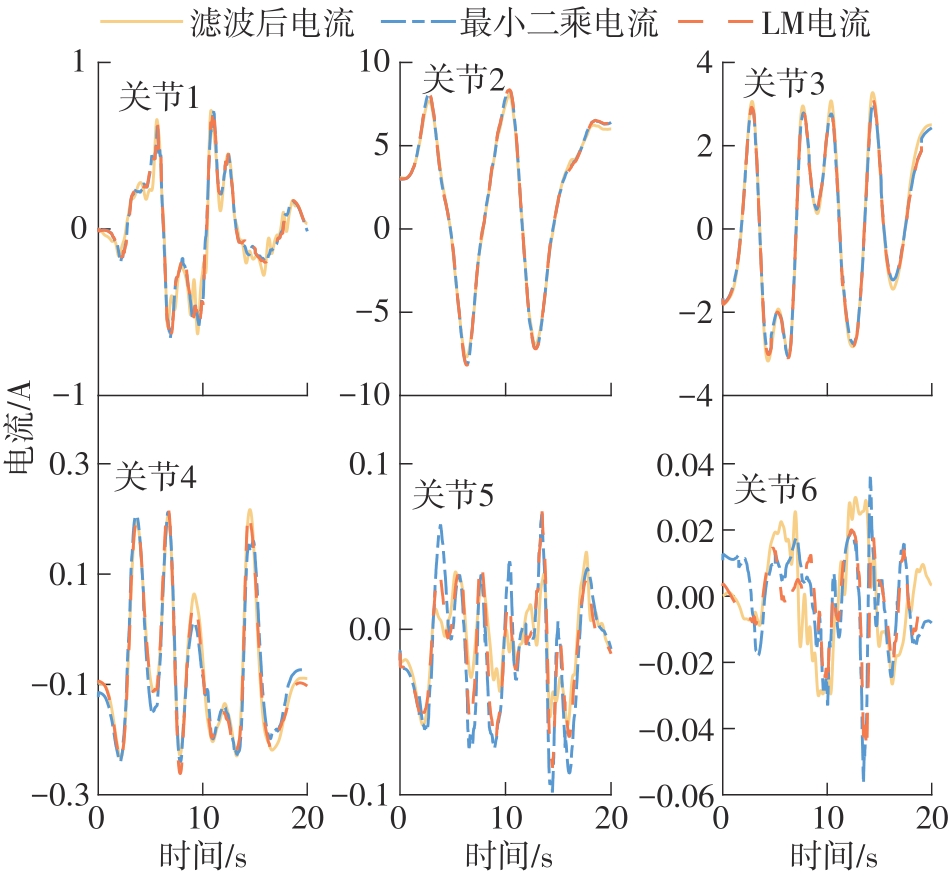
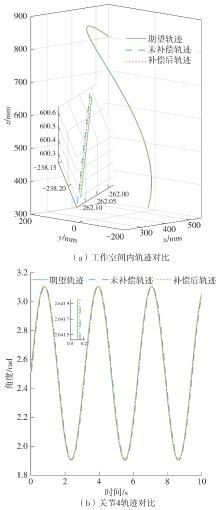
Fig.6
Effect of the trajectory tracking algorithm"

| 1 | BHATT P M, MALHAN R K, RAJENDRAN P,et al .Trajectory-dependent compensation scheme to reduce manipulator execution errors for manufacturing applications [C]∥ Proceedings of the ASME 2021 16th International Manufacturing Science and Engineering Conference.Ohio:American Society of Mechanical Engineers,2021:V001T05A009/1-10. |
| 2 | 曾培江 .机器人系统的摩擦补偿控制方法研究[D].成都:西华大学,2022. |
| 3 | MARQUES F, FLORES P, CLARO J C P,et al .Modeling and analysis of friction including rolling effects in multibody dynamics:a review[J].Multibody System Dynamics,2019,45:223-244. |
| 4 | XIAO B, YIN S, KAYNAK O,et al .Observer-based control for robotic manipulations with uncertain kinematics and dynamics[C]∥ Proceedings of 2016 IEEE the 14th International Workshop on Advanced Motion Control.New Zealand:IEEE,2016:282-288. |
| 5 | 魏琼,焦宗夏,王君,等 .基于LuGre模型的气动位置伺服系统摩擦补偿控制[J].机械工程学报,2018,54(20):131-138. |
| WEI Qiong, JIAO Zongxia, WANG Jun,et al .Control of pneumatic position servo with LuGre model-based friction compensation[J].Journal of Mechanical Engineering,2018,54(20):131-138. | |
| 6 | 李俊阳,赵琛,夏雨,等 .基于改进LuGre摩擦模型的机器人关节模糊自适应反步控制[J].湖南大学学报(自然科学版),2022,49(10):147-156. |
| LI Junyang, ZHAO Chen, XIA Yu,et al .Adaptive fuzzy backstepping control for robot joint based on modified LuGre friction model[J].Journal of Hunan University (Natural Sciences),2022,49(10):147-156. | |
| 7 | WANG S, CHEN Q, REN X,et al .Neural network-based adaptive funnel sliding mode control for servo mechanisms with friction compensation[J].Neurocomputing,2020,377:16-26. |
| 8 | ZHOU Z, WU B .Adaptive sliding mode control of manipulators based on fuzzy random vector function links for friction compensation[J].Optik,2021,27:166055/1-14. |
| 9 | 王军晓,闫小东,徐建明 .基于扰动和摩擦补偿的柔性机械臂系统非奇异快速终端滑模控制[J].控制理论与应用,2023,40(7):1199-1207. |
| WANG Jun-xiao, YAN Xiao-dong, XU Jian-ming .Nonsingular fast terminal-sliding-mode control for flexible manipulator system based on disturbance and friction compensation[J].Control Theory & Application,2023,40(7):1199-1207. | |
| 10 | 李刚,李锋,丁孺琦,等 .基于关节力矩补偿的液压机械臂末端力软测量[J].华南理工大学学报(自然科学版),2022,50(10):140-152. |
| LI Gang, LI Feng, DING Ruqi,et al .Terminal force soft sensing of hydraulic manipulator based on joint torque compensation[J].Journal of South China University of Technology (Natural Science Edition),2022,50(10):140-152. | |
| 11 | 耿令波,陈柏,吴洪涛 .基于连接组合体方法的关节机器人动力学参数辨识[J].中国机械工程,2014,25(5):581-587. |
| GENG Lingbo, CHEN Bai, WU Hongtao .Identification of articulated robots’ dynamics parameters based on linkage-assemblies method[J].Chinese Journal of Mechanical Engineering,2014,25(5):581-587. | |
| 12 | YANG C, JIANG Y, HE W,et al .Adaptive parameter estimation and control design for robot manipulators with finite-time convergence[J].IEEE Transactions on Industrial Electronics,2018,65(10):8112-8123. |
| 13 | 刘磊,赵刚,唐康峻,等 .基于改进灰狼算法的机器人激励轨迹优化[J].组合机床与自动化加工技术,2020(12):35-38. |
| LIU Lei, ZHAO Gang, TANG Kang-jun,et al .Optimization of robot excitation trajectory based on improved gray wolf optimizer[J].Modular Machine Tool & Automatic Manufacturing Technique,2020(12):35-38. | |
| 14 | 张文杰 .基于动力学参数辨识的轨迹跟踪控制策略研究[D].南昌:南昌大学,2022. |
| 15 | GAVIN H P .The Levenberg-Marquardt algorithm for nonlinear least squares curve-fitting problems[R].Durham:Duke University,2019:1-19. |
| 16 | 韩京清 .自抗扰控制技术[M].北京:国防工业出版社,2008. |
| 17 | 李珍珠 .面向HSR-605机器人的轨迹优化研究[D].武汉:华中科技大学,2019. |
| [1] | HE Yongming, XING Wanyu, WEI Kun, et al. Lane-Changing Trajectory Planning Strategy for Autonomous Vehicles on Superhighways [J]. Journal of South China University of Technology(Natural Science Edition), 2024, 52(4): 104-113. |
| [2] | XIE Hui, SHEN Gang, LIU Dong, et al. Braking Transient Impact Suppression Strategy for Single Rope Winding Mine Hoist [J]. Journal of South China University of Technology(Natural Science Edition), 2024, 52(3): 141-150. |
| [3] | WU Chunling, FU Juncheng, XU Xianfeng, et al. Lithium Battery SOC Estimation Based on Multi Innovation Least Square and Multi Innovation Extended Kalman Filter Algorithm [J]. Journal of South China University of Technology(Natural Science Edition), 2024, 52(2): 74-83. |
| [4] | CAO Ningbo, ZHAO Liying. Management Method of Autonomous Vehicles and Pedestrians at Intersections Based on Maximum Pressure Controls [J]. Journal of South China University of Technology(Natural Science Edition), 2024, 52(2): 124-135. |
| [5] | YAO Bin, ZHANG Zihao, DAI Yu, et al. Research on Dynamic Characteristics of Force Sensor Based on VFF-RLS [J]. Journal of South China University of Technology(Natural Science Edition), 2023, 51(5): 86-94. |
| [6] | CAO Xuepeng, WANG Deshuo, FENG Yanli, FAN Hao, ZHANG Gong, ZHANG Xinrong, ZHAO Ruiying. Learning and Generalization of Dual-Robot Cooperative Handling Trajectory Based on Dynamic Movement Primitives [J]. Journal of South China University of Technology(Natural Science Edition), 2023, 51(12): 9-20. |
| [7] | LI Xinkai, HU Xiaocheng, MA Ping, et al.. Driverless Obstacle Avoidance and Tracking Control Based on Improved DDPG [J]. Journal of South China University of Technology(Natural Science Edition), 2023, 51(11): 44-55. |
| [8] | LIN Yongjie, CHEN Ning, LU Kai. Vehicle Trajectory Tracking at Intersections Based on Millimeter Wave Radar Point Cloud [J]. Journal of South China University of Technology(Natural Science Edition), 2023, 51(10): 110-125. |
| [9] | QIN Yaqin, QIAN Zhengfu, XIE Jiming, et al. Cooperative Lane Change Decision-Making Model of Bottleneck Emergency Section in Weaving Area Based on Social Force [J]. Journal of South China University of Technology(Natural Science Edition), 2022, 50(7): 66-75. |
| [10] | CHEN Peng, JIANG Yongqi, YU Tianwei, et al. Quadrotor Trajectory Planning Method Based on Local Soft-Constrained Optimization [J]. Journal of South China University of Technology(Natural Science Edition), 2022, 50(6): 27-36. |
| [11] | CHENG Xiaoyun, QU Xiaping, ZHANG Xueyu, et al. Analysis of Propagation Mechanism of Recurrent Congestion Based on Dynamic Bayesian Network [J]. Journal of South China University of Technology(Natural Science Edition), 2022, 50(11): 25-34. |
| [12] | SHI Buhai, OU Huahai, GUO Qingda . A Fast Teaching Method of Robot Based on Position Tracker [J]. Journal of South China University of Technology(Natural Science Edition), 2022, 50(10): 62-69. |
| [13] | LI Gang, LI Feng, DING Ruqi, et al. Terminal Force Soft Sensing of Hydraulic Manipulator Based on Joint Torque Compensation [J]. Journal of South China University of Technology(Natural Science Edition), 2022, 50(10): 140-152. |
| [14] | YANG Jipeng XIA Ye SUN Limin. Structural Parameter Identification and Seismic Input Inversion Based on Transform Space Method [J]. Journal of South China University of Technology(Natural Science Edition), 2021, 49(8): 85-94. |
| [15] | ZENG Dequan, YU Zhuoping, XIONG Lu, et al. Intelligent Vehicle Obstacle Avoidance Trajectory Planning in Structured Road Based on Analytic Hierarchy Process [J]. Journal of South China University of Technology (Natural Science Edition), 2020, 48(7): 65-75. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||