Journal of South China University of Technology(Natural Science Edition) ›› 2022, Vol. 50 ›› Issue (10): 62-69.doi: 10.12141/j.issn.1000-565X.220003
Special Issue: 2022年电子、通信与自动控制
• Electronics, Communication & Automation Technology • Previous Articles Next Articles
A Fast Teaching Method of Robot Based on Position Tracker
SHI Buhai1 OU Huahai1 GUO Qingda2
- 1.School of Automation Science and Engineering,South China University of Technology,Guangzhou 510640,Guangdong,China
2.Guangzhou Industrial Intelligence Research Institute,Guangzhou 511458,Guangdong,China
-
Received:2022-01-05Online:2022-10-25Published:2022-05-06 -
Contact:史步海(1963-),男,博士,教授,主要从事数控及机器人运动控制系统、计算机远程监控系统以及大时滞系统等研究。 E-mail:bhshi@scut.edu.cn -
About author:史步海(1963-),男,博士,教授,主要从事数控及机器人运动控制系统、计算机远程监控系统以及大时滞系统等研究。 -
Supported by:Guangdong Province Science and Technology Basic Project(2018A030321001)
CLC Number:
Cite this article
SHI Buhai, OU Huahai, GUO Qingda . A Fast Teaching Method of Robot Based on Position Tracker[J]. Journal of South China University of Technology(Natural Science Edition), 2022, 50(10): 62-69.
share this article
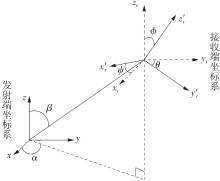
Fig.1
Position tracker model"
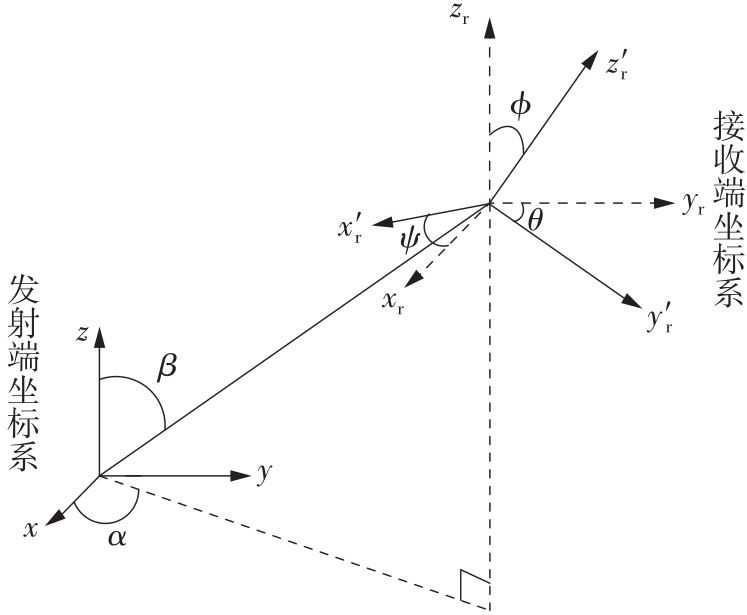
Table 1
Performance comparison of different electromagnetic position trackers"
| 产品 | 公司 | 最大测量距离/mm | 方位精度/(°) | 位置 精度/mm | 数据刷新频率/Hz |
|---|---|---|---|---|---|
Aurara MiniBird Fastrak Viper | NDI Ascension Polhemus Polhemuse | 500 3 050 762 1 820 | 1.1 0.1 0.15 0.1 | 1.60 0.50 0.76 0.38 | 45 144 120 240 |
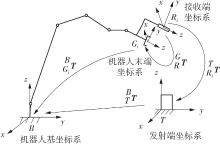
Fig.2
Robot-tracker mathematical model"
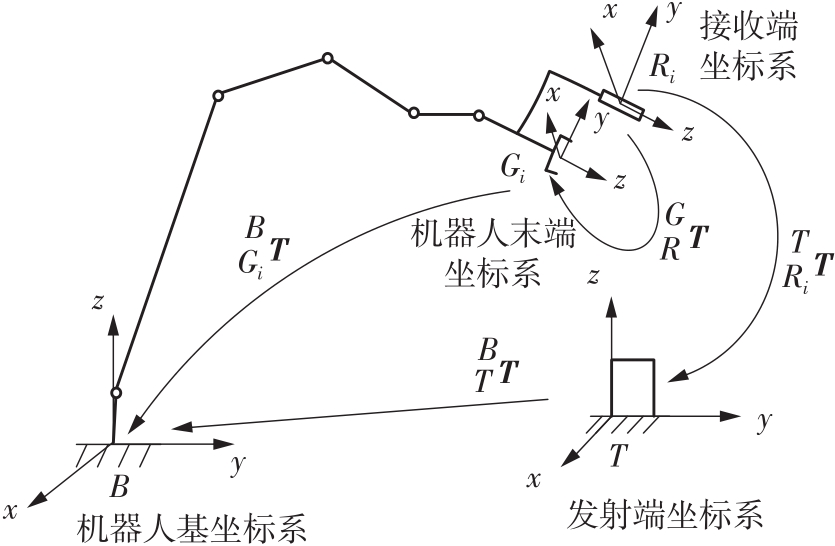
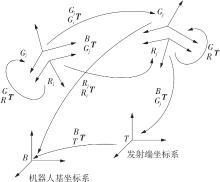
Fig.3
Coordinate system model of two relative motions of robot"


Fig.4
Experiment apparatus"
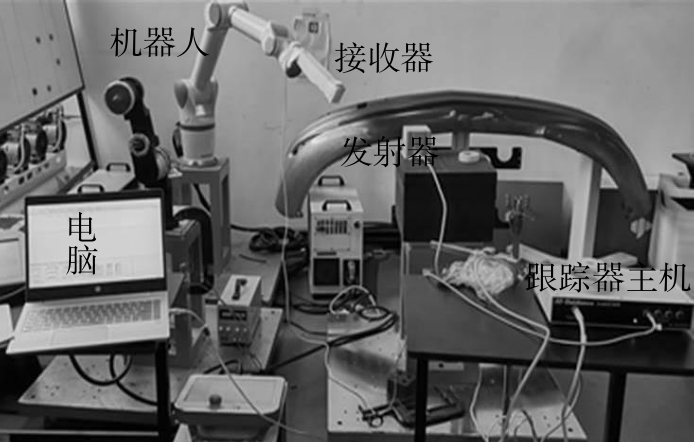
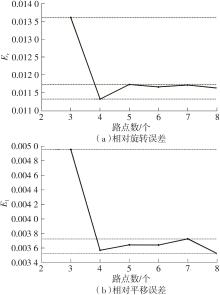
Fig.5
Relative rotation error and relative translation error of verification points for different road points"
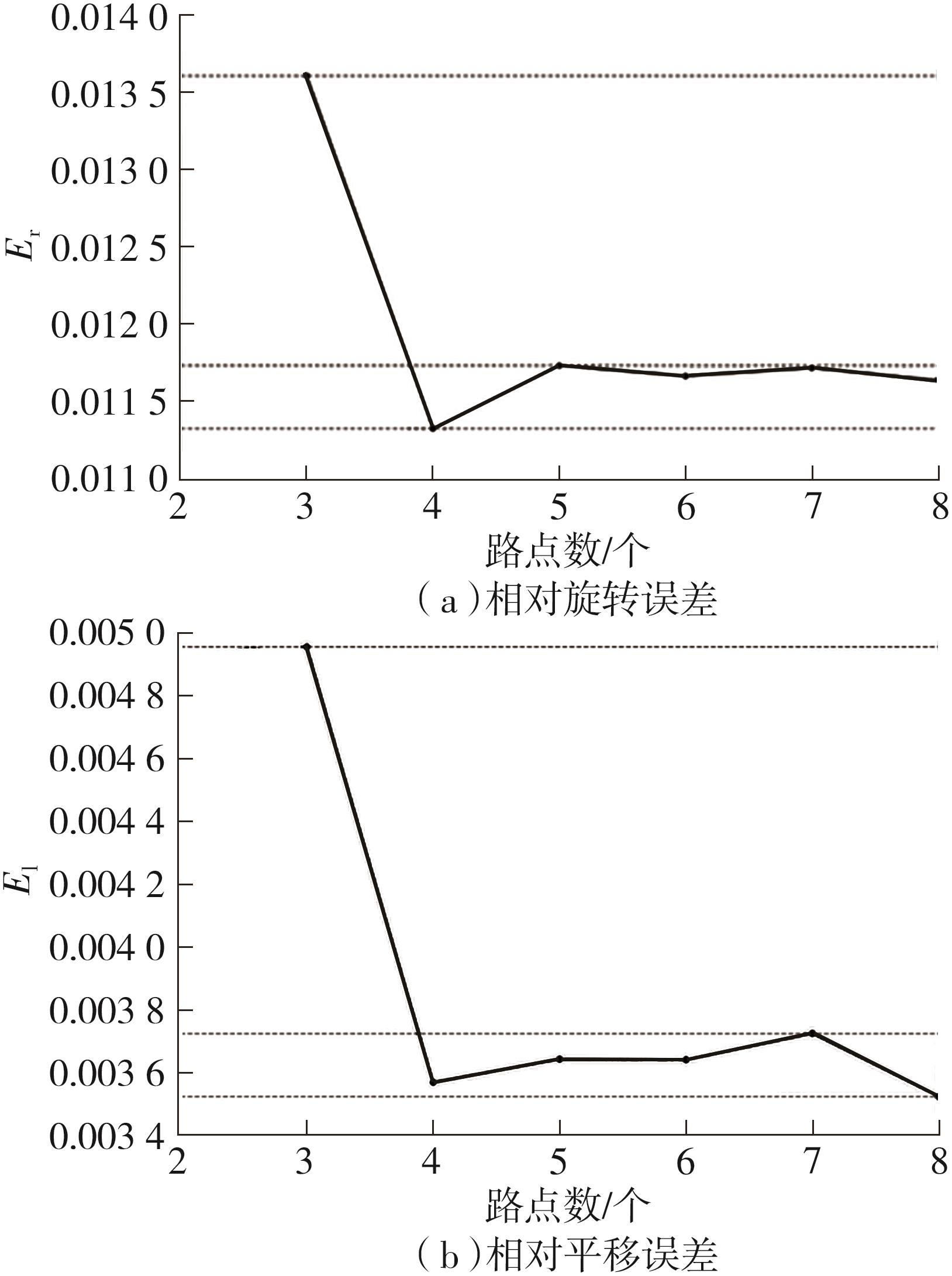
Table 2
Robot pose matrix error"
| 校验路点序号 | 旋转角误差/(°) | 平移分量误差/mm | ||||
|---|---|---|---|---|---|---|
1 2 3 | -0.40 0.40 -0.80 | 0.22 -0.25 0.50 | -0.26 0.17 0.11 | -0.03 0.64 -2.11 | 2.17 2.45 0.11 | 1.31 1.05 -2.11 |
Table 3
Cartesian space coordinates of seven teaching points"
| 示教点序号 | x/mm | z/mm | |
|---|---|---|---|
1 2 3 4 5 6 7 | 978.51 931.27 893.38 849.94 826.21 807.53 781.25 | -873.73 -876.64 -876.15 -882.92 -894.81 -908.86 -905.29 | 241.82 210.59 164.31 102.99 19.59 -94.35 -325.34 |
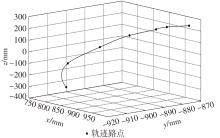
Fig.6
Trajectory planning curve"
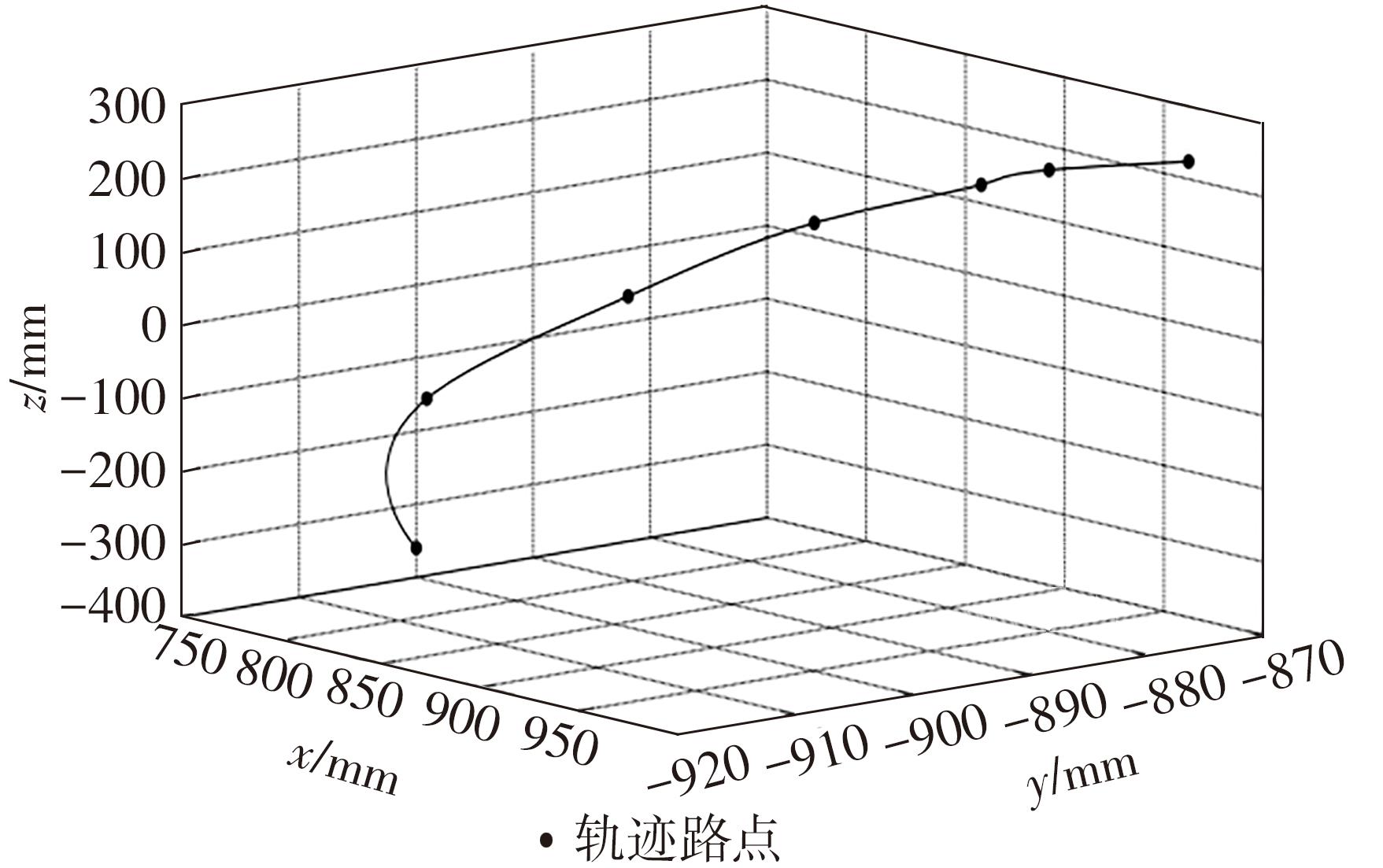

Fig.7
Spray experiment"

| 1 | 孔民秀,赵宁 .机器人示教臂系统的示教实现 [J].机械与电子,2015(10):76-80. |
| KONG Minxiu, ZAHO Ning .Realization of teaching met-hod byrobot teaching arm [J].Machinery and Electronics,2015(10):76-80. | |
| 2 | 韦祖杰 .机器人快速示教方法及示教点位姿变换的研究[J].装备制造技术,2021(4):267-270. |
| WEI Zujie .Research on robot fast teaching method and teaching point attitude transformation [J].Equipment Manufacturing Technology,2021(4):267-270. | |
| 3 | TSAI R Y, LENZ R K .A new technique for fully autonomous and efficient 3D robotics hand/eye calibration [J].IEEE Transactions on Robotics and Automation,1989,5(3):345-358. |
| 4 | SHIU Y C, AHMAD S .Calibration of wrist-mounted robotic sensors by solving homogeneous transform equations of the form AX=XB [J].IEEE Transactions on Roboticsand Automation,1989,5(1):16-29. |
| 5 | 钟宇,张静,张华,等.基于目标检测的机器人手眼标定方法 [J].计算机工程,2022,48(3):100-106. |
| ZHONG Yu, ZHANG Jing, ZHANG Hua,et al .Hand-eye calibration method of robot based on object detection for robots [J].Computer Engineering,2022,48(3):100-106. | |
| 6 | ZHANG Z .A flexible new technique for camera calibration [J].IEEE Transactions on Pattern Analysis and Machine Intelligence,2000,22(11):1330-1334. |
| 7 | 李巍,吕乃光,董明利,等 .凸松弛全局优化机器人手眼标定[J].计算机应用,2017,37(5):1451-1455. |
| LI Wei, Naiguang LÜ, DONG Mingli,et al .Robot hand-eye calibration by convex relaxation global optimization [J].Journal of Computer Applications,2017,37(5):1451-1455. | |
| 8 | WU L, REN H .Finding the kinematic base frame of a robot by hand-eye calibration using 3D position data [J].IEEE Transactions on Automation Science and Engineering,2016,14(1):314-324. |
| 9 | 陈昱 .基于元学习的机器人智能抓取方法研究[D].南京:南京邮电大学,2020. |
| 10 | 程麒,潘丰,袁瑜键 .基于3D视觉传感器的龙门架机器人手眼标定方法[J].光电工程,2021,48(4):30-38. |
| CHENG Qi, PAN Feng, YUAN Yujian .Hand-eye calibration method of gantry robot based on 3D vision sensor[J].Opto-Electronic Engineering,2021,48(4):30-38. | |
| 11 | ANDREFF N, HORAUD R, ESPIAU B. Robot hand-eye calibration using structure-from-motion [J].The Internatio-nal Journal of Robotics Research,2001,20(3):228-248. |
| 12 | ZHAO Z .Hand-eye calibration using convex optimization [C]∥Proceedings of 2011 IEEE International Conference on Robotics and Automation.Washington D C:IEEE,2011:2947-2952. |
| 13 | QIU S, WANG M, KERMANI M R .A new formulation for hand-eye calibrations as point-set matching [J].IEEE Transactions on Instrumentation and Measurement,2020,69(9):6490-6498. |
| 14 | 朱大虎,彭真,华林 .一种机器人测量-加工系统扫描仪坐标系自动标定方法:CN108692688B [P].2020-02-18. |
| 15 | 毕德学,王欣亮,刘志芳,等 .机器人工具和相机位姿标定的新方法 [J].仪器仪表学报,2019,40(1):101-108. |
| BI Dexue, WANG Xinliang, LIU Zhifang,et al .New menthod for robot tool and camera pose calibration [J].Chinese Journal of Scientific Instrument,2019,40(1):101-108. | |
| 16 | 殷勤,陈彬,汪莹,等 .基于各向异性参数模型的六自由度电磁跟踪系统 [J].系统工程理论与实践,2011,31(2):351-356. |
| YIN Qing, CHEN Bin, WANG Ying,et al .Six degree of freedom electromagnetic tracking system based on anisotropic parameters model [J].Systems Engineering-Theory & Practice,2011,31(2):351-356. | |
| 17 | CONDURACHE D, BURLACU A .Orthogonal dual tensor method for solving the AX=XB sensor calibration problem [J].Mechanism and Machine Theory,2016,104:382-404. |
| 18 | DICKSON J D, CLARK J E .Design of a multimodal climbing and gliding robotic platform [J].IEEE/ASME Transactions on Mechatronics,2012,18(2):494-505. |
| 19 | CHOU J C K, KAMEL M .Quaternions approach to solve the kinematic equation of rotation,a/sub a/a/sub x/= a/sub x/a/sub b/,of a sensor-mounted robotic manipulator [C]∥Proceedings of 1988 IEEE International Conference on Robotics and Automation.Philadelphia:IEEE,1988:656-662. |
| 20 | CHOU J C K, KAMEL M. Finding the position and orientation of a sensor on a robot manipulator using quaternions [J].The International Journal of Robotics Research,1991,10(3):240-254. |
| 21 | PARK F C, MARTIN B J .Robot sensor calibration:solving AX= XB on the Euclidean group [J].IEEE Transactions on Robotics and Automation,1994,10(5):717-721. |
| 22 | HORAUD R, DORNAIKA F .Hand-eye calibration [J].The International Journal of Robotics Research,1995,14(3): 195-210. |
| 23 | STROBL K H, HIRZINGER G .Optimal hand-eye calibration [C]∥Proceedings of IEEE/RSJ International Conference on Intelligent Robots and Systems. Beijing:IEEE,2006:4647-4653. |
| 24 | ANDREFF N, HORAUD R, ESPIAU B .On-line hand-eye calibration [C]∥Proceedings of the Second International Conference on 3-D Digital Imaging and Modeling (Cat.No.PR 00062).Ottawa: IEEE,1999:430-436. |
| 25 | DANIILIDIS K .Hand-eye calibration using dual qua-ternions [J].The International Journal of Robotics Research,1999,18(3):286-298. |
| 26 | 姜柱,刘庆元,周曼 .单位四元素在坐标转换中的应用 [J].矿山测量,2012(5):28-29. |
| JIANG Zhu, LIU Qingyuan, ZHOU Man .The application of unit quaterninon in coordinate conversion [J].Mine Surveying,2012(5):28-29. | |
| 27 | 克莱格J J .机器人学导论 [M].贠超,译.北京:机械工业出版社,2006:32. |
| 28 | 王一凡,段锁林,高仁洲,等.基于对偶四元数的机器人手眼标定算法研究 [J].机电工程,2019,36(7):755-760,765. |
| WANG Yifang, DUAN Suolin, GAO Renzhou,et al .Study on robot hand-eye calibration using dual quaternion [J].Journal of Mechanical and Electrical Engineering,2019,36(7):755-760,765. |
| [1] | ZHANG Tie, CHEN Yijie, ZOU Yanbiao. Robot Collision Detection Based on Disturbance Kalman Filter External Torque Observer [J]. Journal of South China University of Technology(Natural Science Edition), 2024, 52(3): 84-92. |
| [2] | JI Xiang, WANG Haihong, ZHAI Tiansong, et al.. Global Output Feedback Finite-Time Synchronization Regulation of Robot Manipulators Using Only Position Measurements [J]. Journal of South China University of Technology(Natural Science Edition), 2023, 51(9): 56-68. |
| [3] | ZHAI Jingmei, LU Dongwei. Research on Optimized Teaching Strategy and BPNN-DMPs Trajectory Learning Model of Massage Robot [J]. Journal of South China University of Technology(Natural Science Edition), 2023, 51(12): 1-8. |
| [4] | CAO Xuepeng, WANG Deshuo, FENG Yanli, FAN Hao, ZHANG Gong, ZHANG Xinrong, ZHAO Ruiying. Learning and Generalization of Dual-Robot Cooperative Handling Trajectory Based on Dynamic Movement Primitives [J]. Journal of South China University of Technology(Natural Science Edition), 2023, 51(12): 9-20. |
| [5] | HUANG Haixin, WANG Zheng, CHENG Shoushan, LI Chunming. Optimized Design of the Main Structure of a Wall-Climbing Robot for Bridge Detection Based on Negative Pressure Adsorption [J]. Journal of South China University of Technology(Natural Science Edition), 2023, 51(12): 21-33. |
| [6] | YAO Daojin, YIN Xiong, LUO Zhen, et al.. AGVS Path Planning Agorithm in Complex Environments [J]. Journal of South China University of Technology(Natural Science Edition), 2023, 51(11): 56-62. |
| [7] | WAN Zhenping, LUO Zhao, LU Longsheng, et al. Inverse Kinematics Solution of 5-DOF Manipulator via Joint Angle Parameterization and Feasible Direction of Approach Vector [J]. Journal of South China University of Technology(Natural Science Edition), 2023, 51(1): 16-21. |
| [8] | WANG Gao, CHEN Xiaohong, LIU Ning, et al. A Robot Grasping Policy Based on Viewpoint Selection Experience Enhancement Algorithm [J]. Journal of South China University of Technology(Natural Science Edition), 2022, 50(9): 126-137. |
| [9] | ZHANG Tie, XU Jinsheng, ZOU Yanbiao . A Force-Sensorless Dragging Teaching Method Based on Disturbance Kalman Filter for Robot [J]. Journal of South China University of Technology(Natural Science Edition), 2022, 50(9): 116-125. |
| [10] | ZHANG Qin, HU Jiahui, REN Hailin. Intelligent Pushing Method and Experiment of Feeding Assistant Robot [J]. Journal of South China University of Technology(Natural Science Edition), 2022, 50(6): 111-120. |
| [11] | WEI Wu, HAN Jin, LI Yanjie, et al. Path Planning of Mobile Robots Based on Dual-Tree Quick-RRT* Algorithm [J]. Journal of South China University of Technology (Natural Science Edition), 2021, 49(7): 51-58. |
| [12] | ZHAI Yuyi, MA Xinyuan, CHEN Dongdong, et al. Research on Joint Motion Control of Soft Wearable Upper Limb Rehabilitation Robots [J]. Journal of South China University of Technology(Natural Science Edition), 2021, 49(6): 19-27. |
| [13] | QUAN Yanming HE Yiming. Research on Clonal Selection Algorithm for Multi-Robot Task Allocation and Scheduling [J]. Journal of South China University of Technology (Natural Science Edition), 2021, 49(5): 102-110. |
| [14] | HUA Dezheng, LIU Xinhua, ZHAO Xin, et al. Design and Experiments of Spherical Magnetic Actuated Robot Based on Magnetorheological Fluid [J]. Journal of South China University of Technology (Natural Science Edition), 2021, 49(2): 151-160. |
| [15] | ZHANG Kaisheng, ZOU Qingbiao, ZHAO Bo, et al. Study on Flexible Biomimetic Robotic Fish Modeling and Its Cruising Speed Based on CEL [J]. Journal of South China University of Technology (Natural Science Edition), 2020, 48(6): 34-41,57. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||