Journal of South China University of Technology(Natural Science Edition) ›› 2023, Vol. 51 ›› Issue (11): 44-55.doi: 10.12141/j.issn.1000-565X.220747
Special Issue: 2023年电子、通信与自动控制
• Electronics, Communication & Automation Technology • Previous Articles Next Articles
Driverless Obstacle Avoidance and Tracking Control Based on Improved DDPG
LI Xinkai HU Xiaocheng MA Ping ZHANG Hongli
- School of Electrical Engineering,Xinjiang University,Urumqi 830017,Xinjiang,China
-
Received:2022-11-14Online:2023-11-25Published:2023-03-28 -
About author:李新凯(1991-),男,博士,讲师,主要从事智能控制、复杂非线性控制研究。E-mail:lxk@xju. edu. cn -
Supported by:the National Natural Science Foundation of China(62263030)
CLC Number:
Cite this article
LI Xinkai, HU Xiaocheng, MA Ping, et al.. Driverless Obstacle Avoidance and Tracking Control Based on Improved DDPG[J]. Journal of South China University of Technology(Natural Science Edition), 2023, 51(11): 44-55.
share this article
Table 1
Status information for unmanned vehicles"
| 名称 | 取值范围 | 定义 |
|---|---|---|
| SpeedX | (-∞,+∞) | 车辆纵向(车行驶方向)车速 |
| Angle | -π~π rad | 汽车行驶方向和道路轴方向的夹角 |
| Track | 0~200 m | 200 m范围内车辆与道路边缘的距离 |
| TrackPos | (-∞,+∞) | 车辆与道路中心线之间的距离,利用道路宽度将其归一化处理,0表示在道路中心线上,1和-1都表示车辆越过道路边缘线 |
| Opponents | 0~100 m | 100 m范围内障碍物的距离 |

Fig.1
Measurement inputs for driverless vehicle"
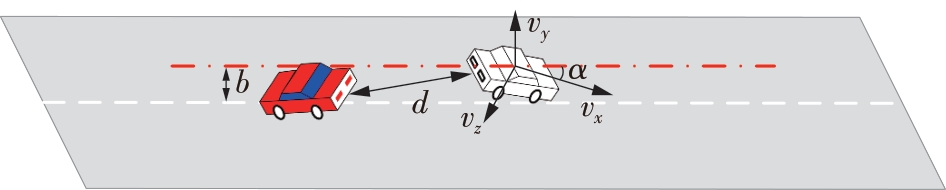
Fig.2
Basic deep reinforcement learning model for driverless vehicle"
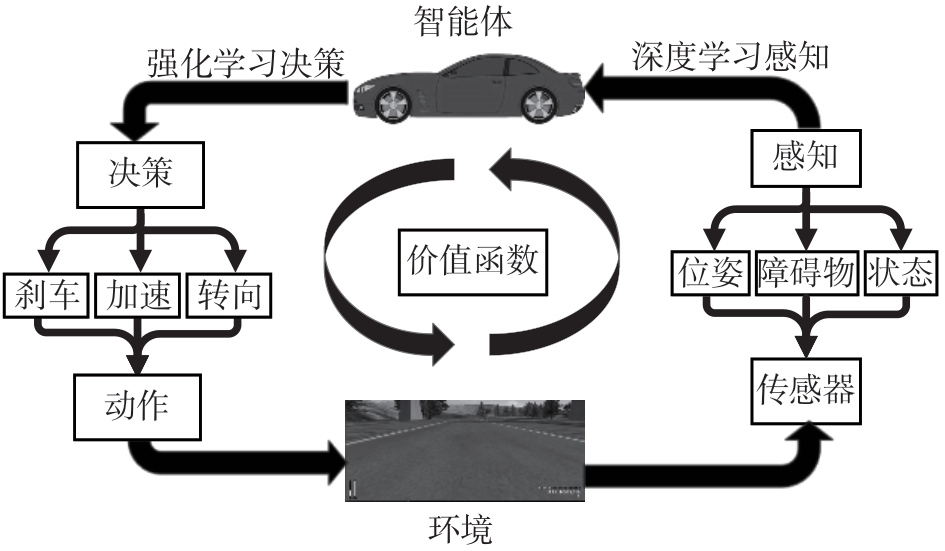
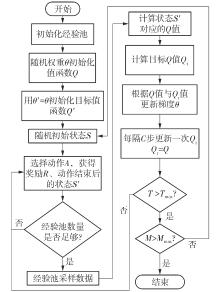
Fig.3
Flow chart of driverless obstacle avoidance tracking control algorithm based on DDPG algorithm"
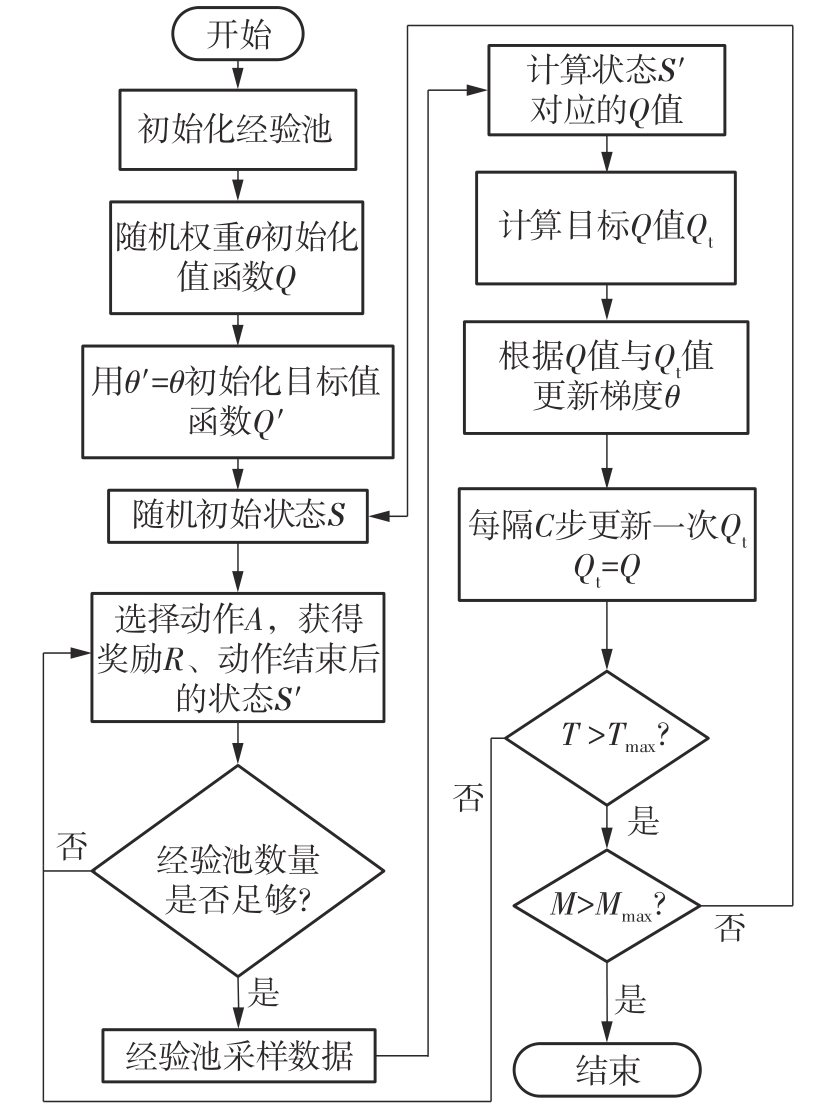
Table 2
Definition of output control volumes"
| 名称 | 取值范围 | 定义 |
|---|---|---|
| 加速 | [0,1] | 0表示不加速,1表示全加速 |
| 转向 | [-1,1] | 0表示不转向,-1和1分别表示向左、向右最大转向 |
| 刹车 | [0,1] | 0表示不刹车,1表示最大刹车 |
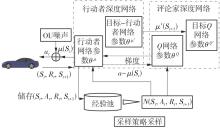
Fig.4
Basic framework of DDPG algorithm"
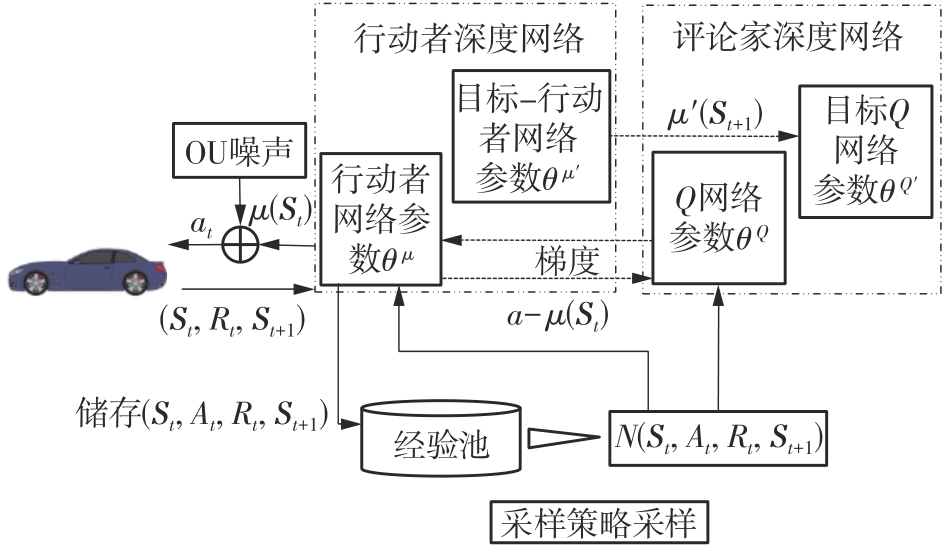
Fig.5
Actor network structure"

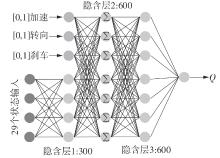
Fig.6
Critic network structure"
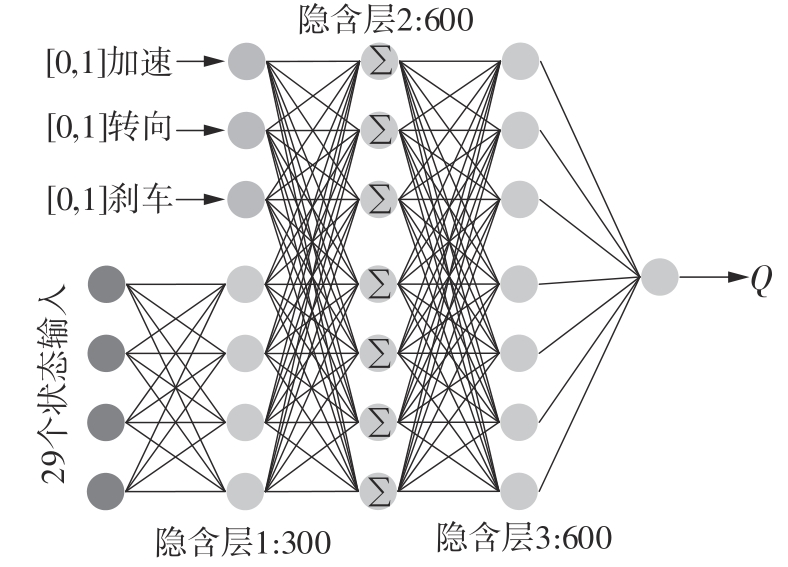
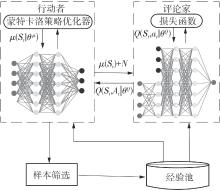
Fig.7
Schematic diagram of the network structure of MC-DDPG algorithm"
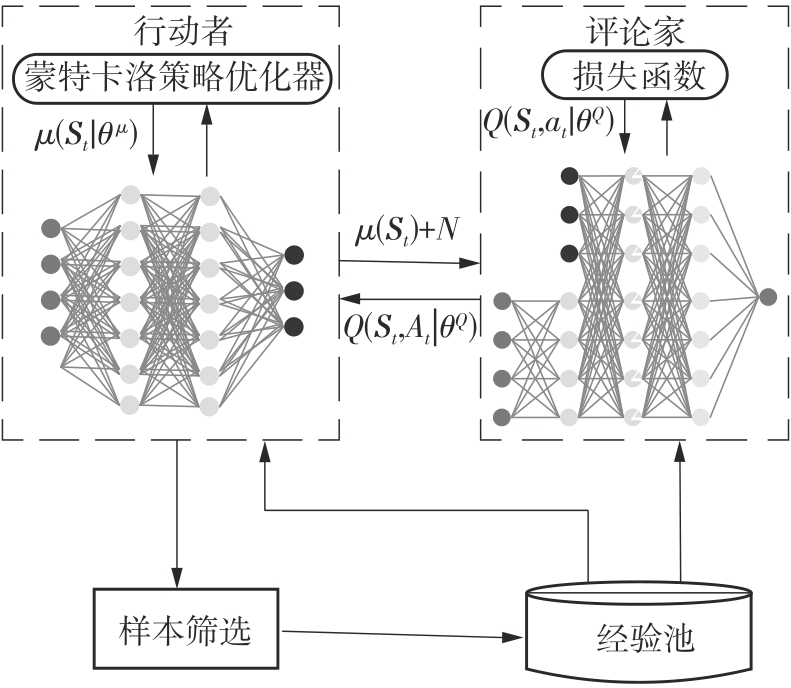
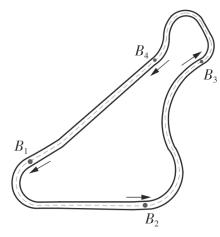
Fig.8
Driverless obstacle avoidance training roadmap"
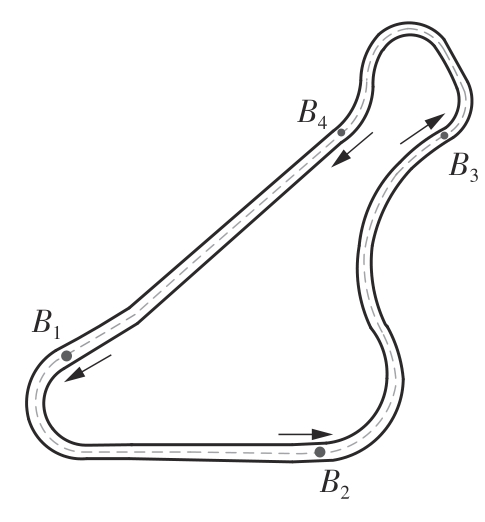
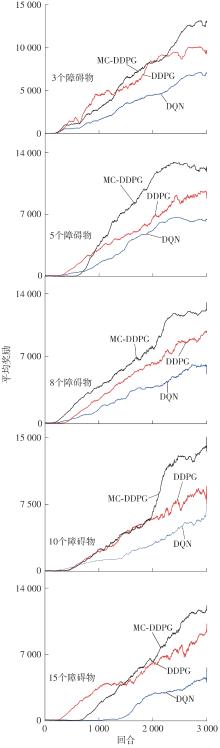
Fig.9
Cumulative reward curves of three algorithms in the training scenario"
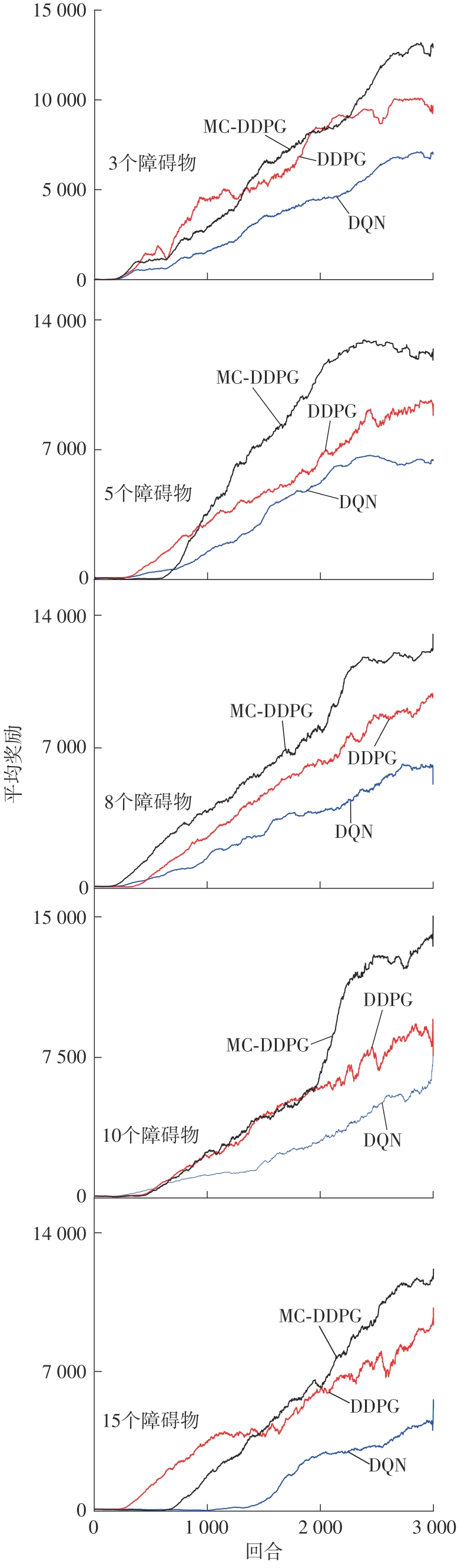
Table 3
Comparison of cumulative return performance among three algorithms"
| 障碍物数量 | Q值 | ||
|---|---|---|---|
| MC-DDPG | DDPG | DQN | |
| 3 | 12 787 | 9 895 | 6 778 |
| 5 | 12 506 | 9 307 | 6 289 |
| 8 | 12 035 | 9 535 | 6 141 |
| 10 | 12 751 | 8 944 | 5 572 |
| 15 | 11 385 | 8 107 | 4 226 |
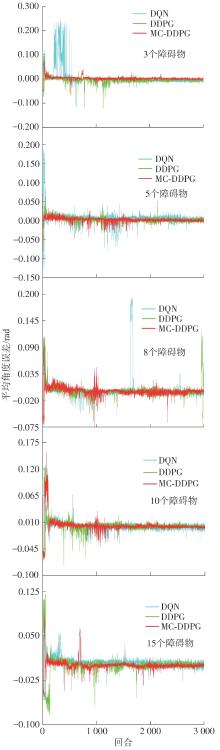
Fig.10
Angular error curves of three algorithms for different numbers of obstacles"
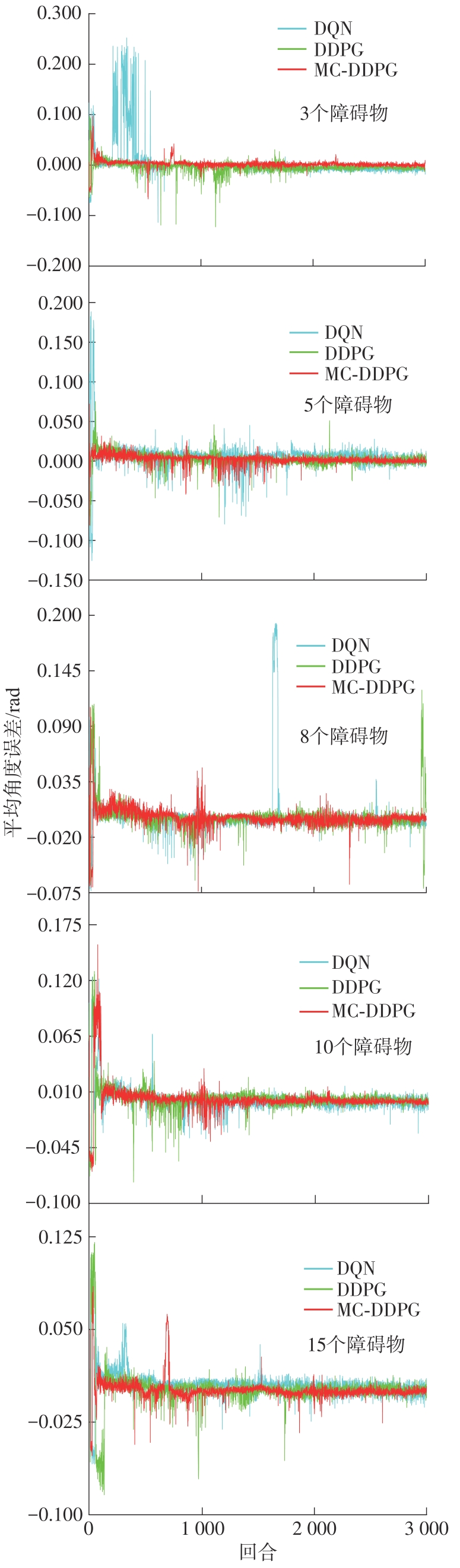
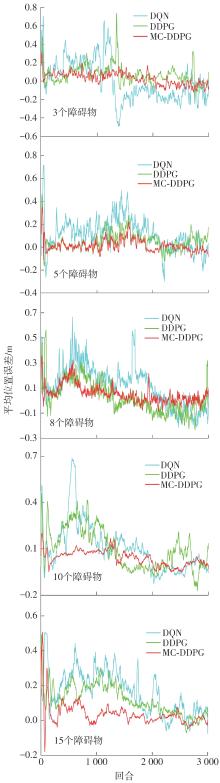
Fig.11
Position error curves of the three algorithms for different numbers of obstacles"
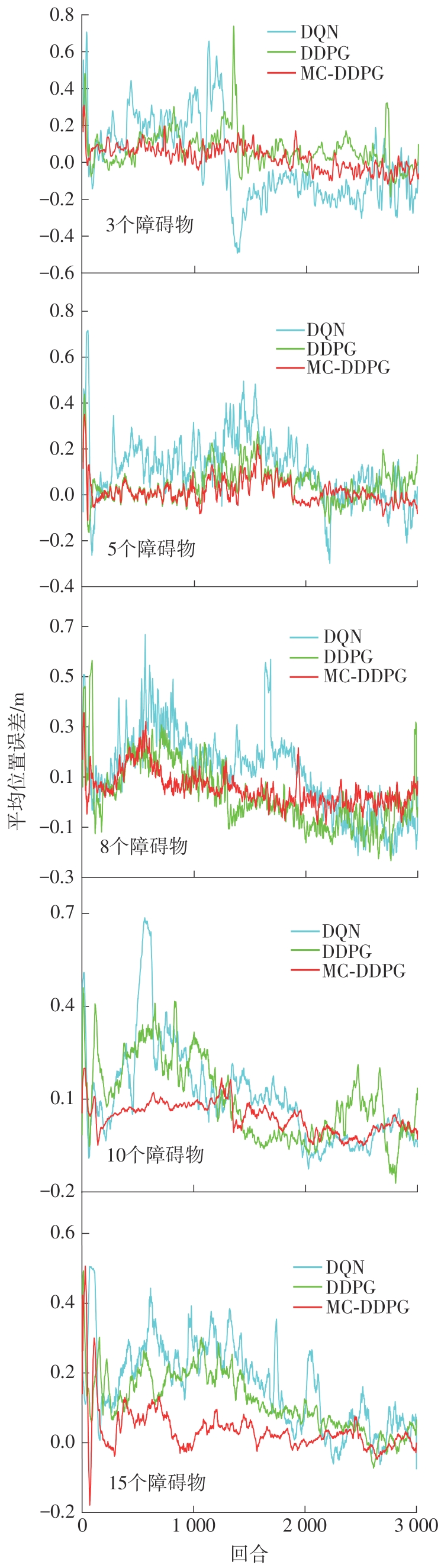
Table 4
Comparison of angular error among three algorithms"
| 障碍物数量 | 角度误差/rad | ||
|---|---|---|---|
| MC-DDPG | DDPG | DQN | |
| 3 | 0.001 95 | 0.002 17 | 0.002 62 |
| 5 | 0.001 41 | 0.002 37 | 0.003 16 |
| 8 | 0.001 43 | 0.002 16 | 0.002 21 |
| 10 | 0.001 54 | 0.002 16 | 0.003 61 |
| 15 | 0.001 64 | 0.002 23 | 0.004 15 |
Table 5
Comparison of position error among three algorithms"
| 障碍物数量 | 位置误差/m | ||
|---|---|---|---|
| MC-DDPG | DDPG | DQN | |
| 3 | 0.145 7 | 0.201 1 | 0.316 4 |
| 5 | 0.143 5 | 0.181 5 | 0.245 7 |
| 8 | 0.165 0 | 0.241 8 | 0.308 5 |
| 10 | 0.187 2 | 0.175 4 | 0.351 8 |
| 15 | 0.143 7 | 0.213 0 | 0.291 6 |
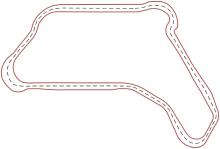
Fig.12
Driverless obstacle avoidance validation roadmap"
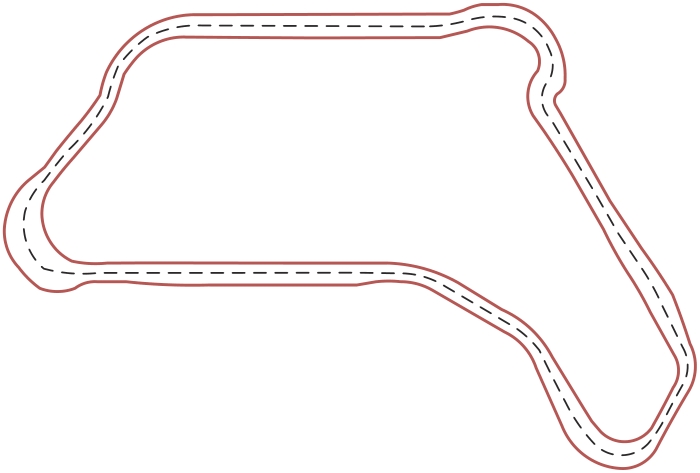
Fig.13
Driverless tracking speed curves of three algorithms"
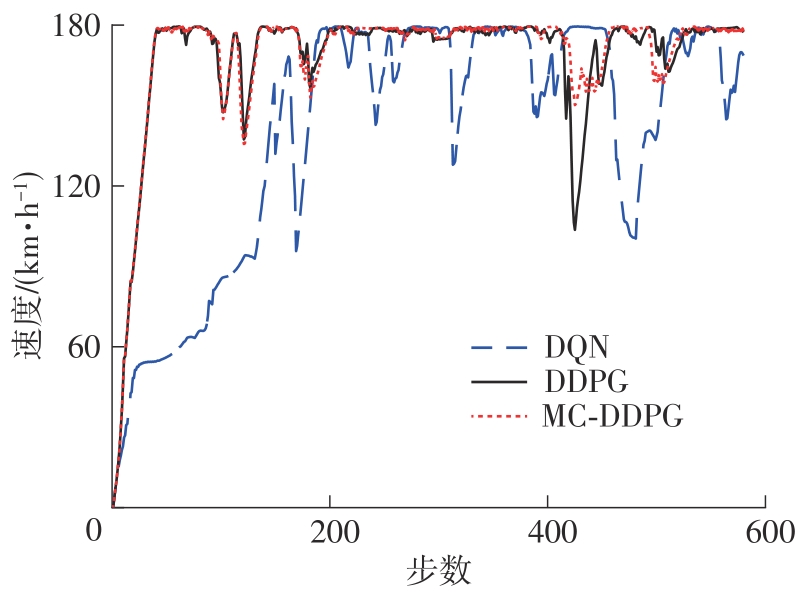
Fig.14
Reward return curves of three algorithms"
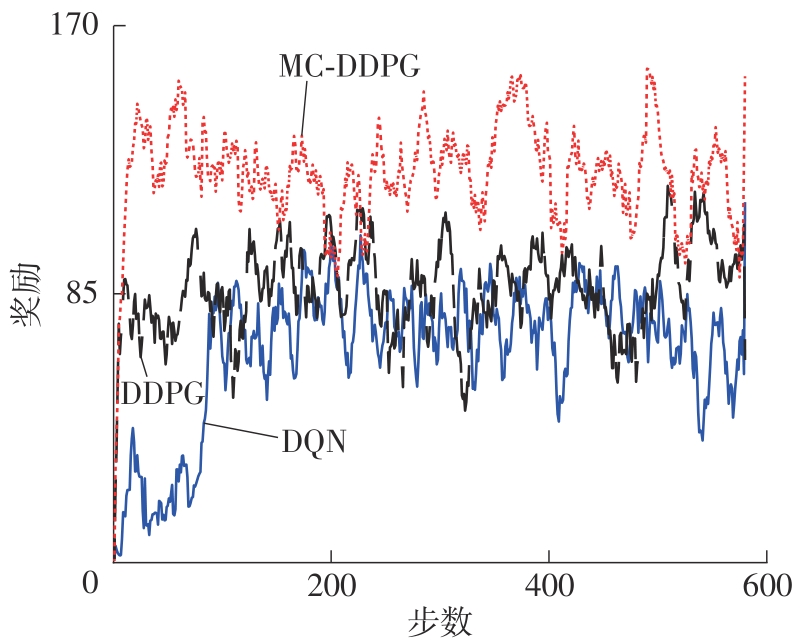

Fig.15
Angular and positional error curves of three algorithms at different obstacle avoidance steps"
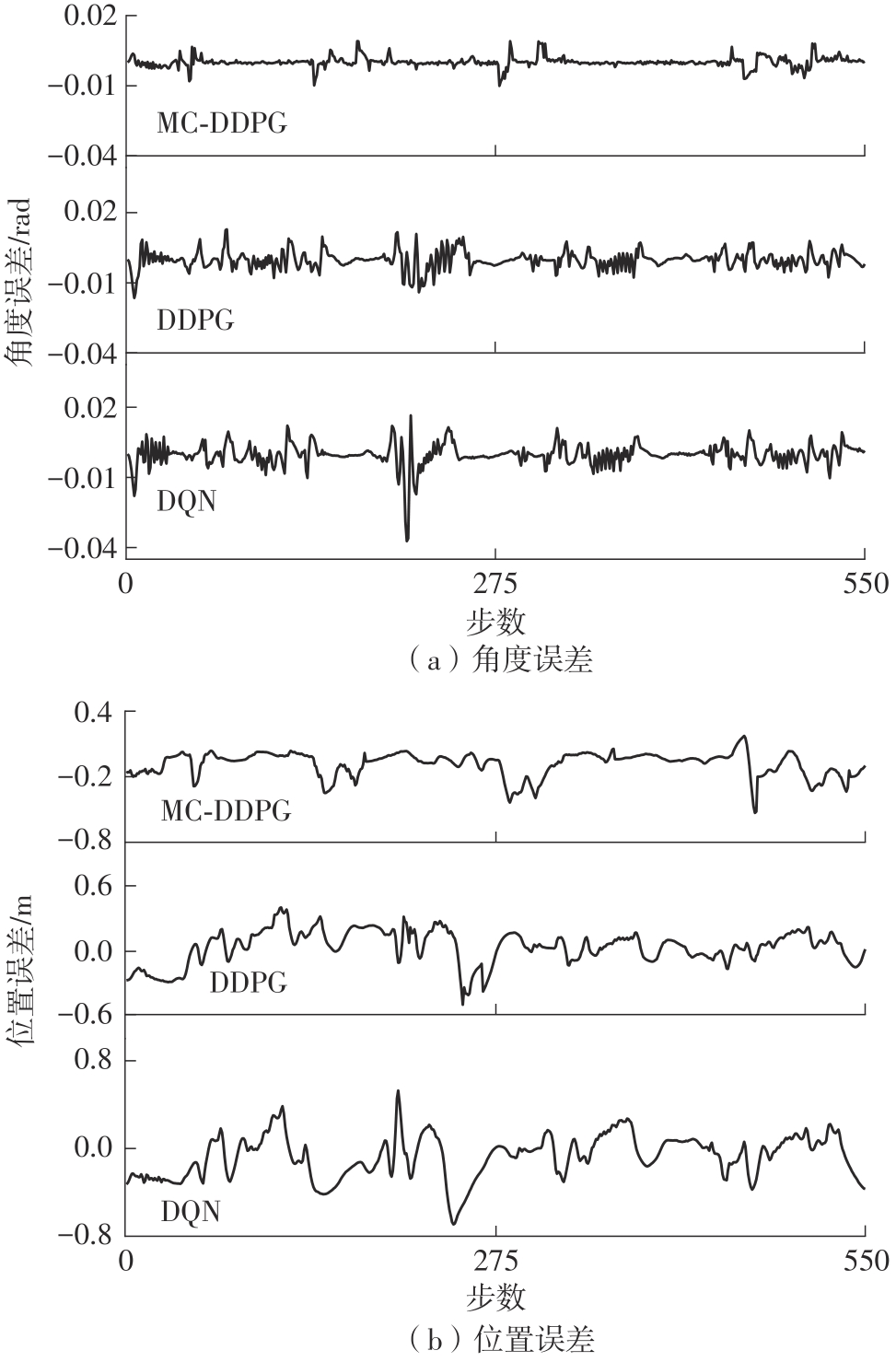
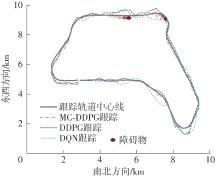
Fig.16
Obstacle avoidance track tracking roadmap"
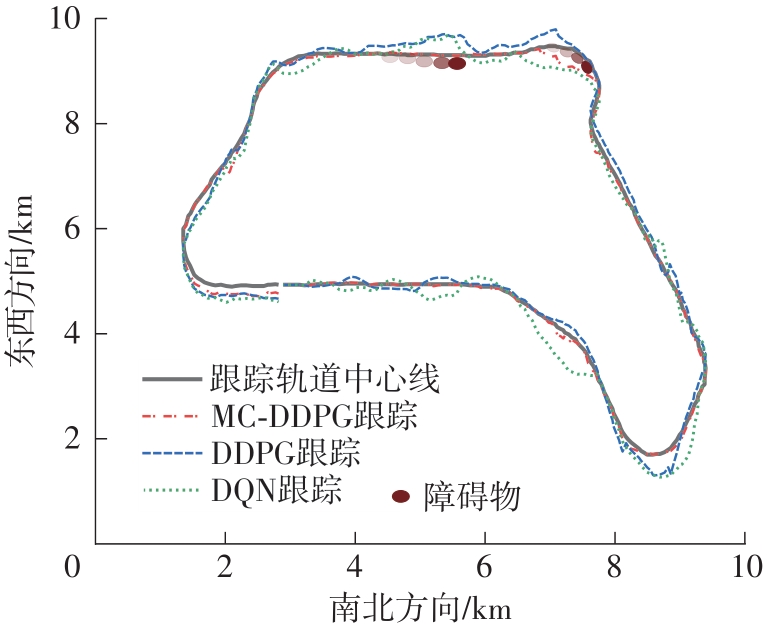
Table 6
Performance comparison of three algorithms for obstacle avoidance tracking process"
| 算法 | 平均位置误差/m | 最远避障距离(归一化值) | 平均避障步数 |
|---|---|---|---|
| MC-DDPG | 0.090 | 0.35 | 23 |
| DDPG | 0.154 | 0.40 | 31 |
| DQN | 0.184 | 0.39 | 32 |
| 1 | JAN B, FARMAN H, KHAN M .Designing a smart transportation system:an internet of things and big data approach[J].IEEE Wireless Communications,2019,26(4):73-79. |
| 2 | 徐向阳,胡文浩,董红磊 .自动驾驶汽车测试场景构建关键技术综述[J].汽车工程,2021,43(4):610-619. |
| XU Xiangyang, HU Wenhao, DONG Honglei .Overview of key technologies for autonomous vehicle test scenario construction[J].Automotive Engineering,2021,43(4):610-619. | |
| 3 | 熊璐,杨兴,卓桂荣,等 .无人驾驶车辆的运动控制发展现状综述[J].机械工程学报,2020,56(10):127-143. |
| XIONG Lu, YANG Xing, ZHUO Guirong,et al .Overview on motion control of autonomous vehicles[J].Journal of Mechanical Engineering,2020,56(10):127-143. | |
| 4 | ZHANG X L, ZHANG W X, ZHAO Y Q .Personalized motion planning and tracking control for autonomous vehicles obstacle avoidance[J].IEEE Transactions on Vehicular Technology,2022,71(5):4733-4747. |
| 5 | 于向军,槐元辉,姚宗伟 .工程车辆无人驾驶关键技术[J].吉林大学学报(工学版),2021,51(4):1153-1168. |
| YU Xiang-jun, KUI Yuan-hui, YAO Zong-wei .Key technologies in autonomous vehicle for engineering[J].Journal of Jilin University(Engineering and Technology Edition),2021,51(4):1153-1168. | |
| 6 | GRUYER D, MAGNIER V, HAMDI K,et al .Perception information processing and modeling:critical stages for autonomous driving applications[J].Annual Reviews in Control,2017,41(10):323-341. |
| 7 | 张家旭,杨雄,施正堂,等 .汽车紧急换道避障的路径规划与跟踪控制[J].华南理工大学学报(自然科学版),2020,48(9):86-93,106. |
| ZHANG Jiaxu, YANG Xiong, SHI Zhengtang,et al .Path planning and tracking control for emergency lane change and obstacle avoidance of vehicles[J].Journal of South China University of Technology (Natural Science Edition),2020,48(9):86-93,106. | |
| 8 | WANG T, JIANG J F, LIN Y T,et al .Driver model for obstacle avoidance based on CarSim[J].Transactions of the Chinese Society of Agricultural Engineering,2010,26(5):159-163. |
| 9 | 樊晓平,李双艳,陈特放 .基于新人工势场函数的机器人动态避障规划[J].控制理论与应用,2005,22(5):703-707. |
| FAN Xiao-ping, LI Shuang-yan, CHEN Te-fang .Dynamic obstacle-avoiding path plan for robots based on a new artificial potential field function[J].Control Theory & Applications,2005,22(5):703-707. | |
| 10 | KATSUKI R, TASAKI T, WATANABE T .Graph search based local path planning with adaptive node sampling[C]∥ Proceedings of 2018 IEEE Intelligent Vehicles Symposium.Changshu:IEEE,2018:2084-2089. |
| 11 | WANG Hong-chao, ZHANG Wei-wei, WU Xun-cheng,et al .A double-layer nonlinear model predictive control based control algorithm for local trajectory planning for automated trucks under uncertain road adhesion coefficient conditions[J].Frontiers of Information Technology & Electronic Engineering,2020,21(7):1059-1074. |
| 12 | ZONG C G, JI Z J, YU Y,et al .Research on obstacle avoidance method for mobile robot based on multisensor information fusion[J].Sensors and Materials,2020,32(4):1159-1170. |
| 13 | YANG Z C, FENG Y T, ZHANG L X,et al .Obstacle avoidance control of underactuated robot based on neural network feedforward compensation[J].Measurement & Control Technology,2017,36(11):89-97. |
| 14 | 姚强强,田颖,王圣渊,等 .基于力驱动的智能汽车路径跟踪控制策略[J].华南理工大学学报(自然科学版),2022,50(2):33-41,57. |
| YAO Qiangqiang, TIAN Ying, WANG Shengyuan,et al .Research on path tracking control strategy of intelligent vehicles based on force drive[J].Journal of South China University of Technology (Natural Science Edition),2022,50(2):33-41,57. | |
| 15 | SALLAB A E, ABDOU M, PEROT E,et al .Deep reinforcement learning framework for autonomous driving[J].Electronic Imaging,2017,29(19):70-76. |
| 16 | 卢笑,竺一薇,阳牡花,等 .联合图像与单目深度特征的强化学习端到端自动驾驶决策方法[J].武汉大学学报(信息科学版),2021,46(12):1862-1871. |
| LU Xiao, ZHU Yiwei, YANG Muhua,et al .Reinforcement learning based end-to-end autonomous driving decision-making method by combining image and monocular depth features[J].Geomatics and Information Science of Wuhan University,2021,46(12):1862-1871. | |
| 17 | 张守武,王恒,陈鹏,等 .神经网络在无人驾驶车辆运动控制中的应用综述[J].工程科学学报,2022,44(2):235-243. |
| ZHANG Shou-wu, WANG Heng, CHEN Peng,et al .Overview of the application of neural networks in the motion control of unmanned vehicles[J].Chinese Journal of Engineering,2022,44(2):235-243. | |
| 18 | 董豪,杨静,李少波,等 .基于深度强化学习的机器人运动控制研究进展[J].控制与决策,2022,37(2):278-292. |
| DONG Hao, YANG Jing, LI Shao-bo,et al .Research progress of robot motion control based on deep reinforcement learning[J].Control and Decision,2022,37(2):278-292. | |
| 19 | WANG Y P, ZHENG K X, TIAN D X,et al .Asynchronous supervised learning pre-training methods for reinforcement learning autonomous driving models[J].Frontiers of Information Technology & Electronic Engineering,2021,22(5):673-687. |
| 20 | 吕帅,龚晓宇,张正昊,等 .结合进化算法的深度强化学习方法研究综述[J].计算机学报,2022,45(7):1478-1499. |
| Shuai LÜ, GONG Xiao-yu, ZHANG Zheng-hao,et al .Survey of deep reinforcement learning methods with evolutionary algorithms[J].Chinese Journal of Computers,2022,45(7):1478-1499. | |
| 21 | 张新钰,高洪波,赵建辉,等 .基于深度学习的自动驾驶技术综述[J].清华大学学报(自然科学版),2018,58(4):438-444. |
| ZHANG Xinyu, GAO Hongbo, ZHAO Jianhui,et al .Overview of deep learning intelligent driving methods [J].Journal of Tsinghua University (Science and Technology),2018,58(4):438-444. | |
| 22 | 陈红名,刘全,闫岩,等 .基于经验指导的深度确定性多行动者-评论家算法[J].计算机研究与发展,2019,56(8):1708-1720. |
| CHEN Hongming, LIU Quan, YAN Yan,et al .An experience-guided deep deterministic actor-critic algorithm with multi-actor[J].Journal of Computer Research and Development,2019,56(8):1708-1720. | |
| 23 | 陈亮,梁宸,张景异,等 .Actor-Critic框架下一种基于改进DDPG的多智能体强化学习算法[J].控制与决策,2021,36(1):75-82. |
| CHEN Liang, LIANG Chen, ZHANG Jing-yi,et al .A multi-intelligence reinforcement learning algorithm based on improved DDPG in the Actor-Critic framework[J].Control and Decision,2021,36(1):75-82. |
| [1] | LIN Yongjie, CHEN Ning, LU Kai. Vehicle Trajectory Tracking at Intersections Based on Millimeter Wave Radar Point Cloud [J]. Journal of South China University of Technology(Natural Science Edition), 2023, 51(10): 110-125. |
| [2] | ZHANG Jiaxu, WANG Chen, WANG Xinzhi, et al. Self-Driving Vehicle Speed Estimation Based on Adaptive Filter [J]. Journal of South China University of Technology (Natural Science Edition), 2021, 49(1): 74-81. |
| [3] | YANG Shun WU Jian JIANG Yuande WANG Guojun LIU Haizhen. Deep-Learning-Based Lane-Keeping Control Framework: From Virtuality to Reality [J]. Journal of South China University of Technology(Natural Science Edition), 2019, 47(9): 90-97. |
| [4] | Li Lin Ren Jun- lin Zou Yan- biao Lu Zhou. Trajectory Tracking of Mobile Robot Based on Immune Genetic Algorithm [J]. Journal of South China University of Technology (Natural Science Edition), 2013, 41(7): 13-18,25. |
| [5] | He Yue-bang Pei Hai-long Ye Xiang Zhang Qian. Trajectory Tracking Control of Unmanned Helicopters by Using Adaptive Dynamic Surface Approach [J]. Journal of South China University of Technology (Natural Science Edition), 2013, 41(5): 1-8. |
| [6] | He Yue-bang Pei Hai-long Zhao Yun-ji Li Jian-qiang. Flight Control Design of Unmanned Helicopter Based on Robust Integral Filtering Backstepping [J]. Journal of South China University of Technology (Natural Science Edition), 2013, 41(2): 30-36. |
| [7] | Zhai Jing-mei Kang Bo Tang Hui-hua. Adaptive Fuzzy Variable Structure Control Algorithm for Trajectory Tracking of Industrial Robots [J]. Journal of South China University of Technology(Natural Science Edition), 2012, 40(12): 12-16,23. |
| [8] | Xue Zhen-yu Fang Da-zhong Yuan Shi-qiang. Parameter Optimization Design of PSS Based on Functional Sensitivity [J]. Journal of South China University of Technology (Natural Science Edition), 2011, 39(8): 140-145. |
| [9] | Ye Jin-hua Li Di Ye Feng Lai Yi-zong. Adaptive Backstepping Sliding Mode Control of Uncertain Nonholonomic AGV [J]. Journal of South China University of Technology(Natural Science Edition), 2011, 39(12): 32-37,43. |
| [10] | Lin Pei-qun Xu Jian-min. Detection and Trajectory Tracking of Moving Vehicles in Complicated Traffic Scene [J]. Journal of South China University of Technology (Natural Science Edition), 2008, 36(6): 84-89. |
| [11] | Bian Jian-yong Xu Jian-min Hu Yue-ming. Trajectory Tracking Control of Intelligent Vehicle Based on Vision and Backstepping Method [J]. Journal of South China University of Technology (Natural Science Edition), 2008, 36(6): 90-94. |
| [12] | Zhao Yi-hong Zhu Jian-ying. Trajectory Tracking Control of Car-Like Mobile Robot Based on Integrated Steering [J]. Journal of South China University of Technology (Natural Science Edition), 2006, 34(11): 60-63. |
| [13] | Wu Xin-sheng Ren Hua-ying. An Optimized Fuzzy Control Approach to the Trajectory Tracking of Nonholonomic Mobile Robots [J]. Journal of South China University of Technology(Natural Science Edition), 2004, 32(3): 44-49. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||