Journal of South China University of Technology(Natural Science Edition) ›› 2025, Vol. 53 ›› Issue (1): 49-61.doi: 10.12141/j.issn.1000-565X.240207
• Electronics, Communication & Automation Technology • Previous Articles Next Articles
Design of a Cascade Controller of Trajectory Tracking for Omnidirectional AGV Driven by Mecanum Wheels
WEN Shengping1 SU Yilong1 QU Hongyi2
- 1.Guangdong Advanced Polymer Manufacturing Technology and Equipment Key Laboratory/Key Laboratory of Polymer Processing Engineering of the Ministry of Education,South China University of Technology,Guangzhou 510640,Guangdong,China
2.Guangdong Institute of Intelligent Manufacturing/Guangdong Key Laboratory of Modern Control Technology,Guangdong Academy of Sciences,Guangzhou 510070,Guangdong,China
-
Received:2024-04-28Online:2025-01-25Published:2025-01-02 -
About author:文生平(1966—),男,博士,教授,主要从事智能控制与机器视觉等研究。E-mail: shpwen@scut.edu.cn -
Supported by:the National Key Research and Development Plan of China(2019YFC1908201)
CLC Number:
Cite this article
WEN Shengping, SU Yilong, QU Hongyi. Design of a Cascade Controller of Trajectory Tracking for Omnidirectional AGV Driven by Mecanum Wheels[J]. Journal of South China University of Technology(Natural Science Edition), 2025, 53(1): 49-61.
share this article

Fig.1
Physical image of Mecanum wheel"

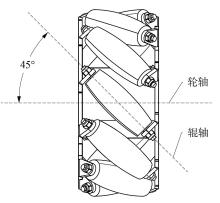
Fig.2
Axle and roller shaft of Mecanum wheel"
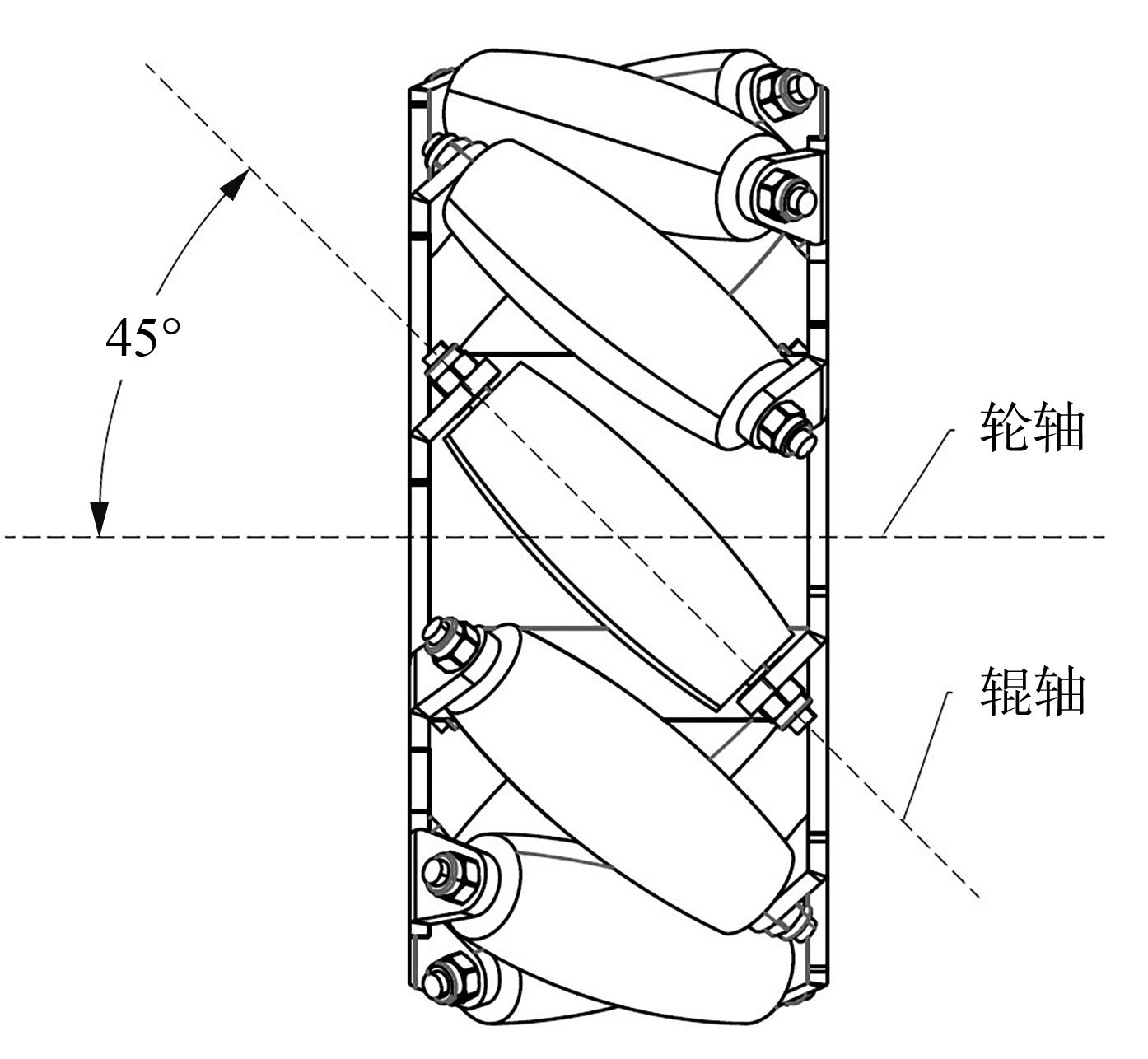

Fig.3
Diagrams of the omnidirectional motion of four-Mecanum-wheel AGV"
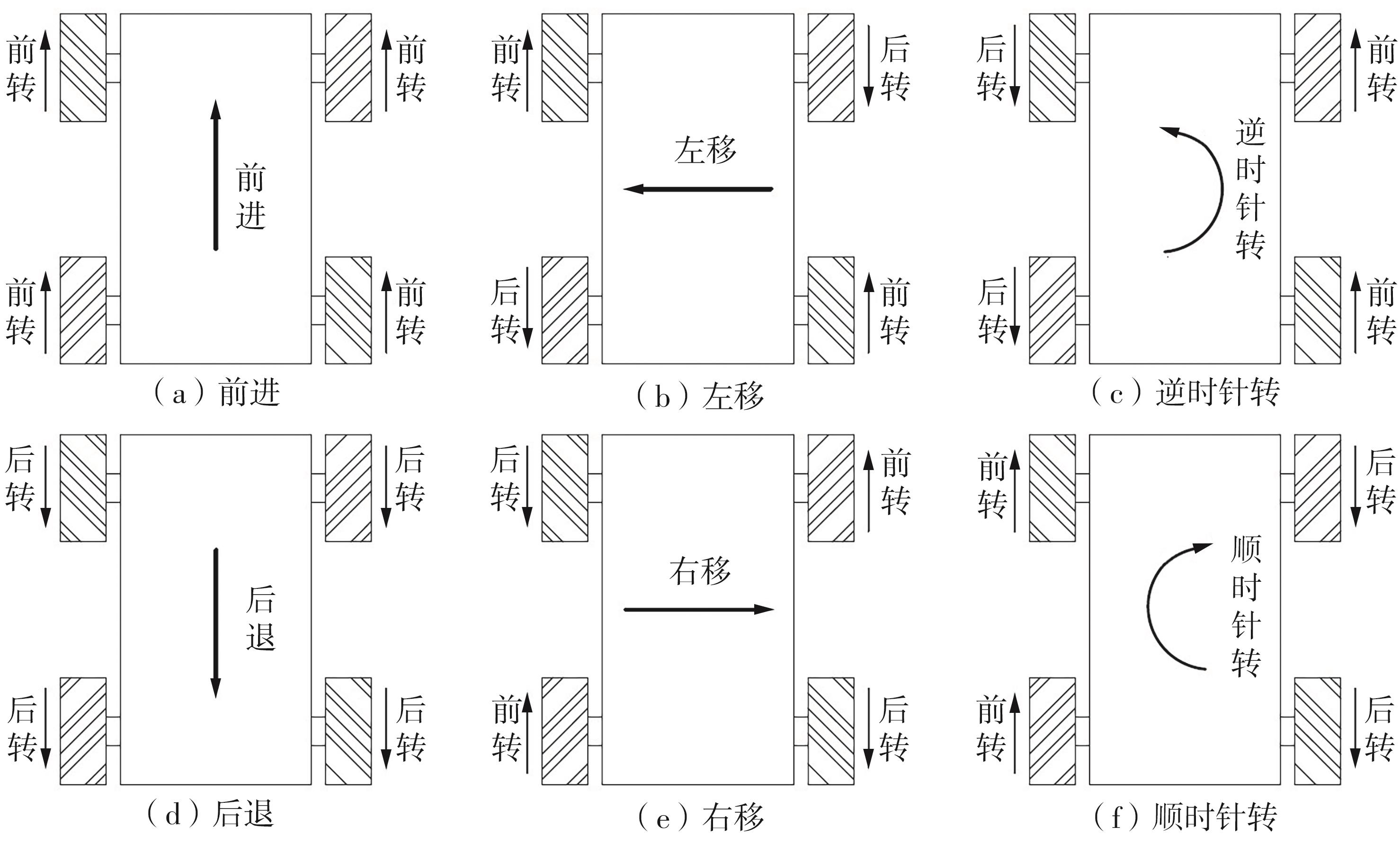
Fig.4
Kinematic analysis of four-Mecanum-wheel AGV"
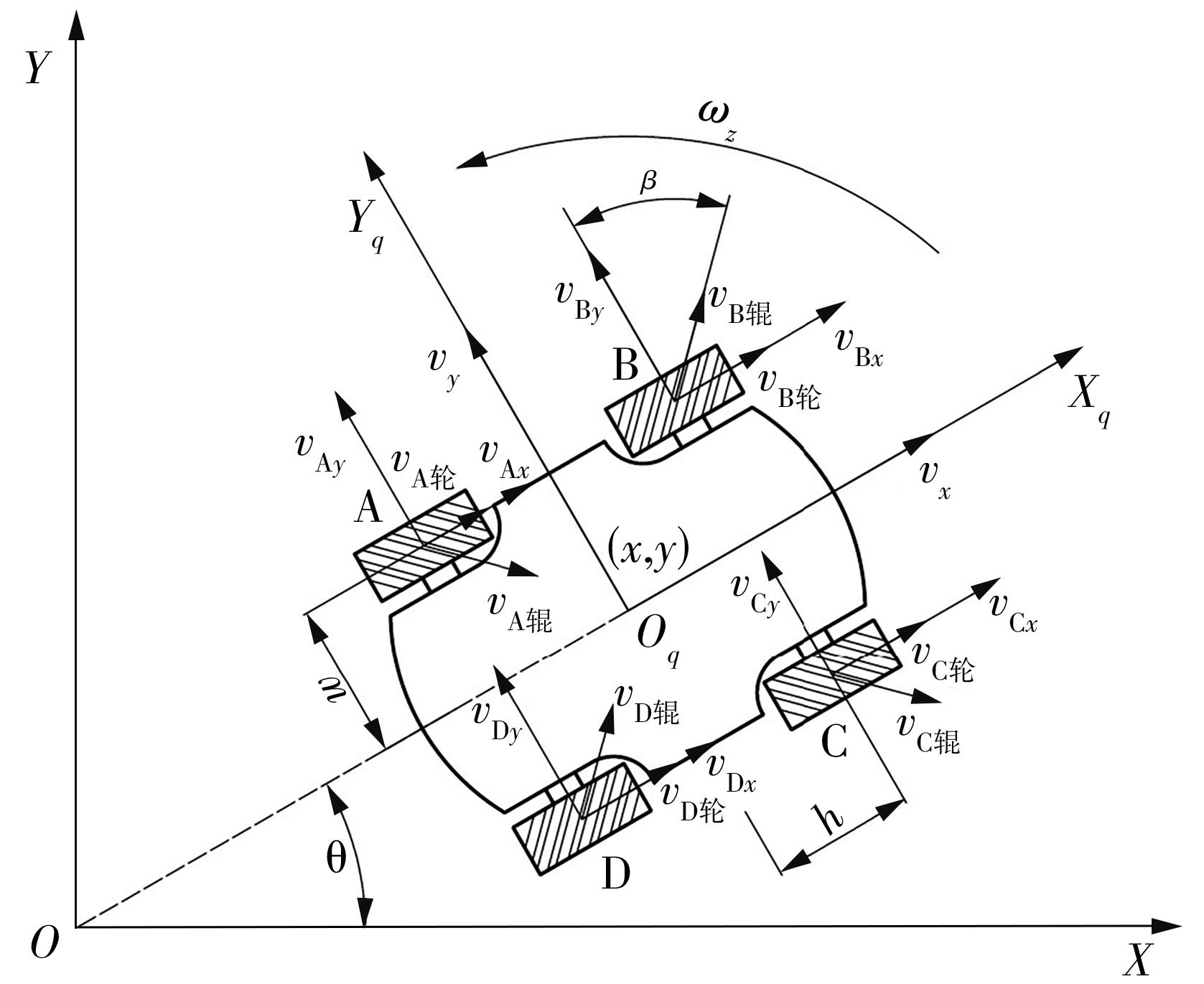

Fig.5
Overall control process of MPC+ELM-SMC"
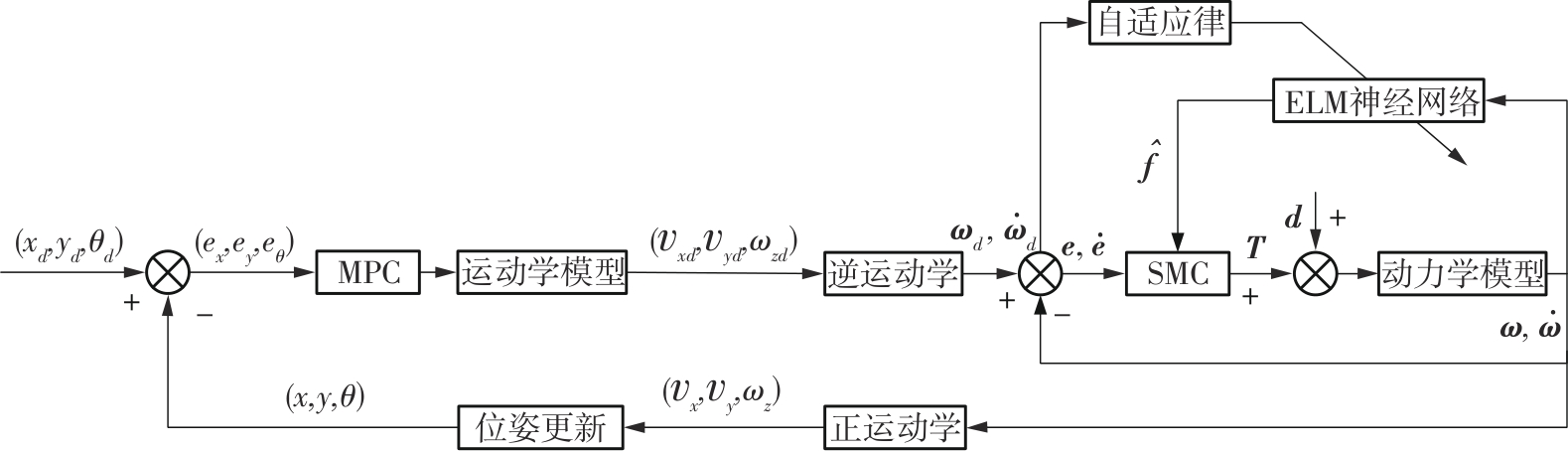
Fig.6
Structure of ELM neural network"
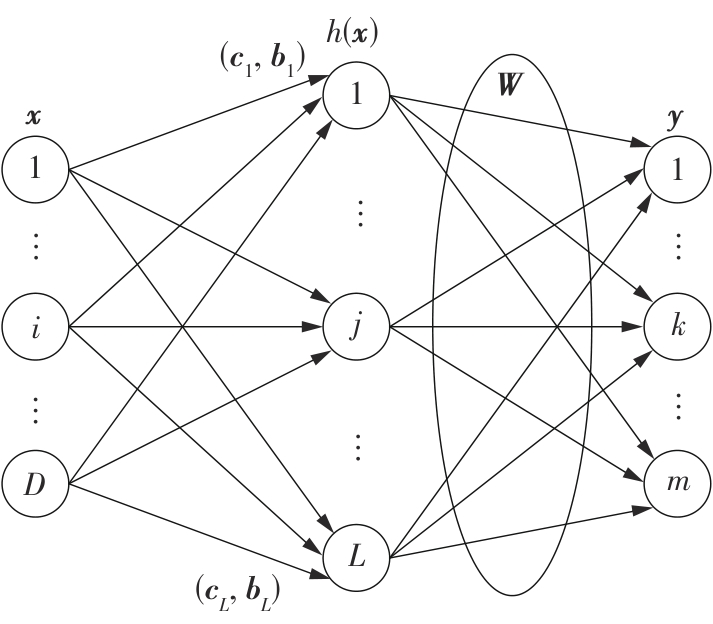

Fig.7
Comparison of trajectory tracking curves"
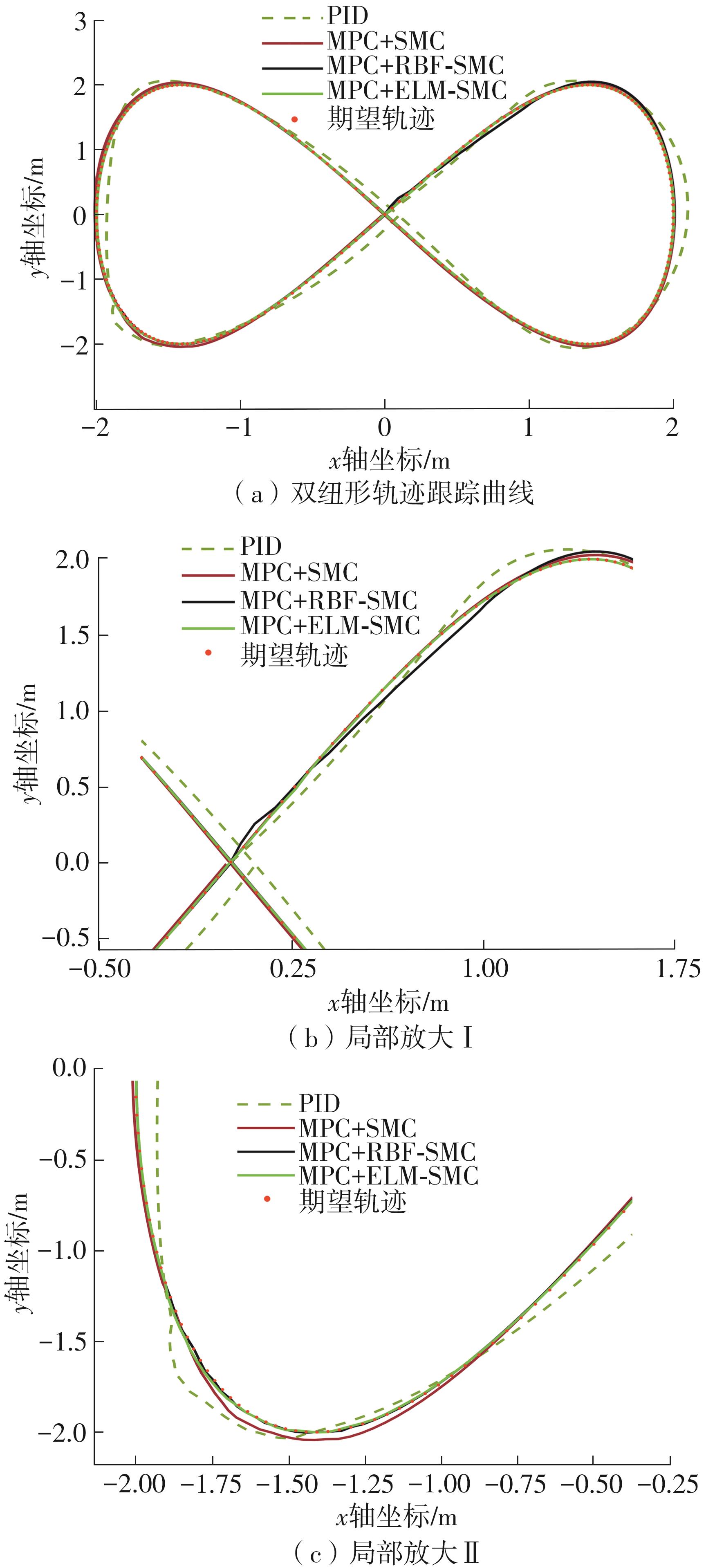

Fig.8
Comparison of tracking errors"
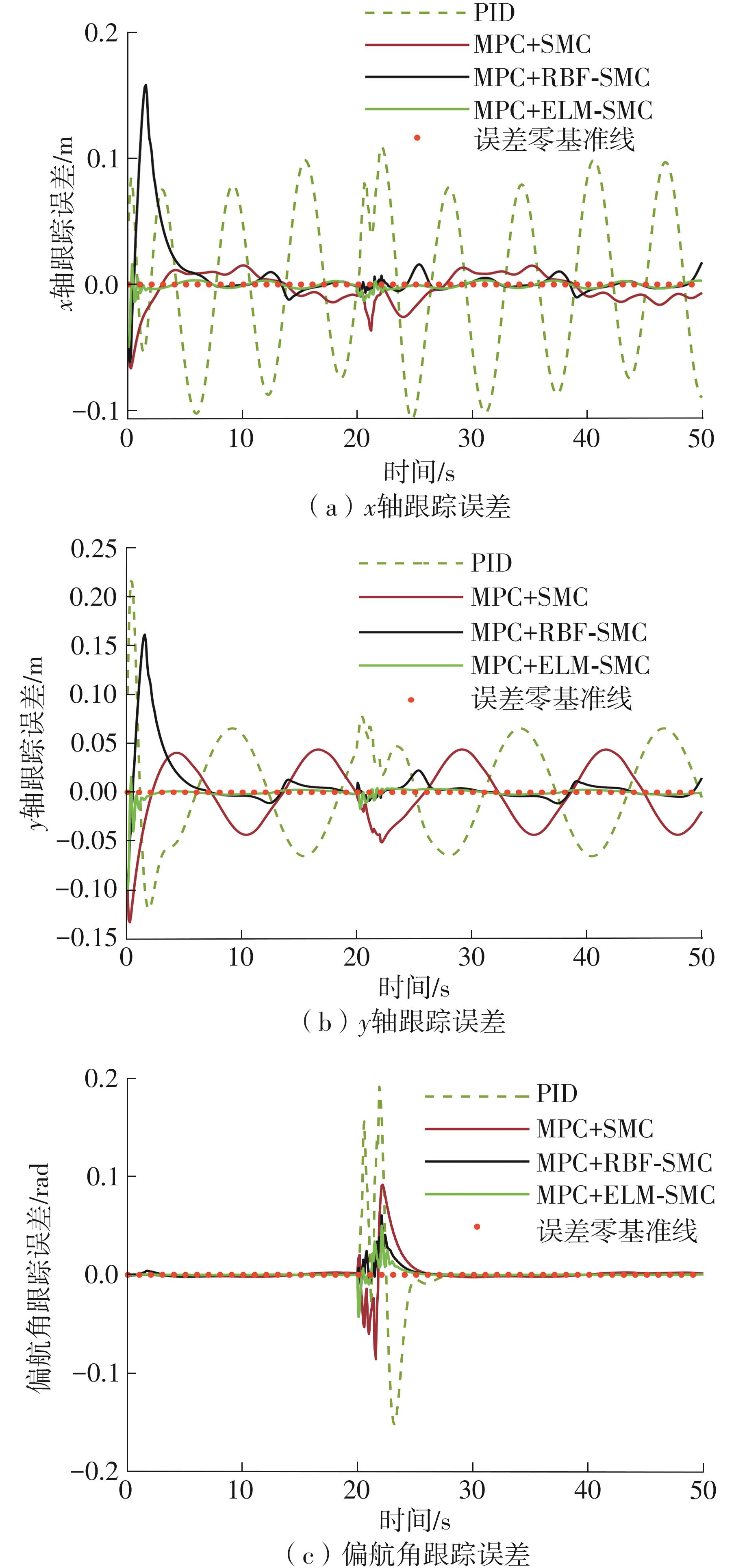
Table 1
Maximum value of trajectory tracking error"
| 跟踪误差 | 最大值 | |||
|---|---|---|---|---|
| PID | MPC+SMC | MPC+RBF-SMC | MPC+ELM-SMC | |
| 0.101 9 | 0.016 2 | 0.017 6 | 0.003 3 | |
| 0.065 4 | 0.043 7 | 0.014 6 | 0.002 6 | |
| 0.000 3 | 0.002 4 | 0.000 6 | 0.000 4 | |
Table 2
Standard deviation of trajectory tracking error"
| 跟踪误差 | 标准差 | |||
|---|---|---|---|---|
| PID | MPC+SMC | MPC+RBF-SMC | MPC+ELM-SMC | |
| 0.063 5 | 0.013 0 | 0.023 4 | 0.004 0 | |
| 0.053 1 | 0.033 2 | 0.024 7 | 0.006 9 | |
| 0.030 9 | 0.014 6 | 0.006 2 | 0.005 2 | |
Fig.9
Comparison of wheel speed tracking results"
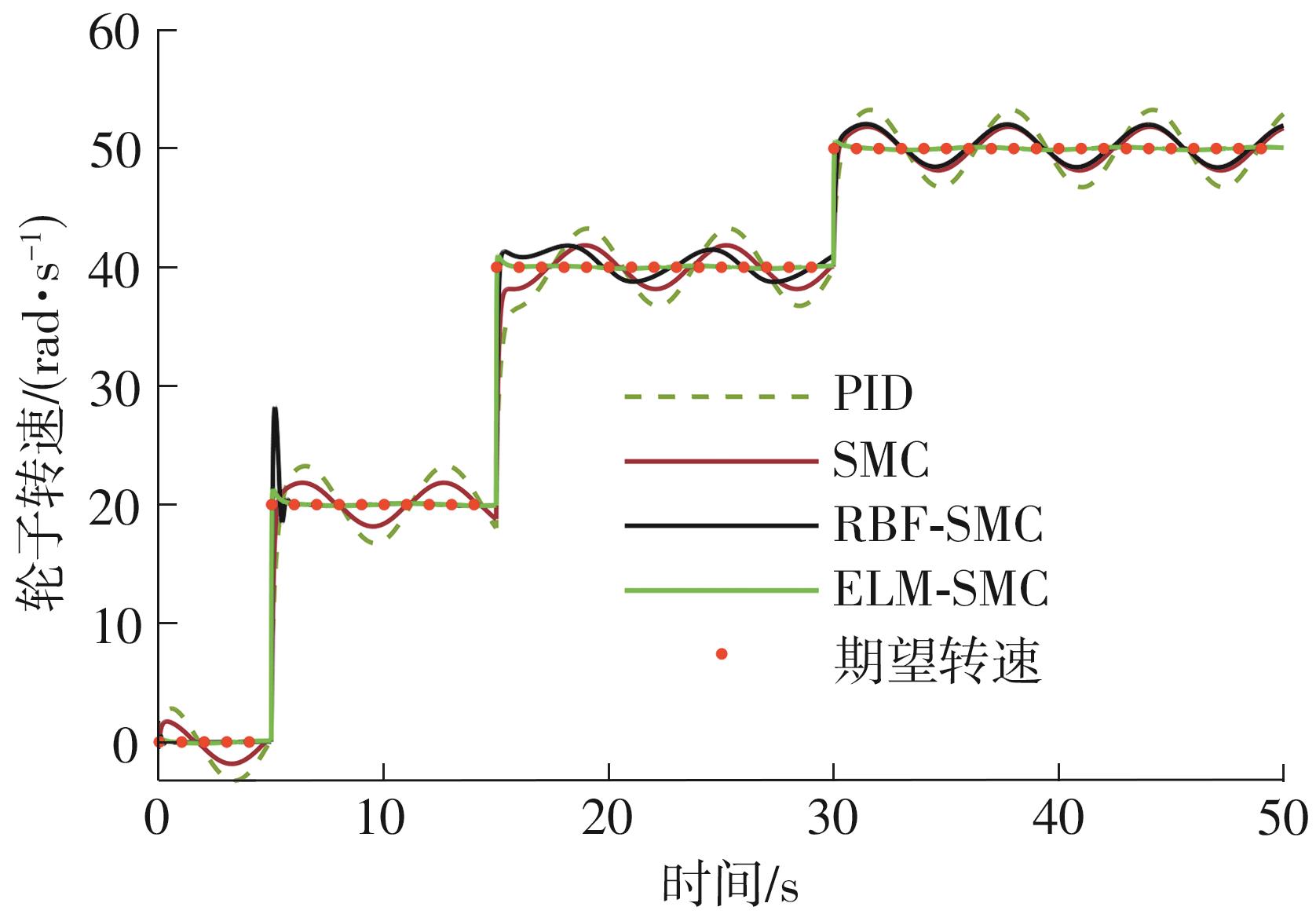
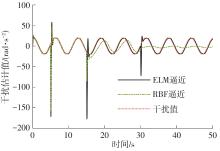
Fig.10
Comparison of interference estimation curves"
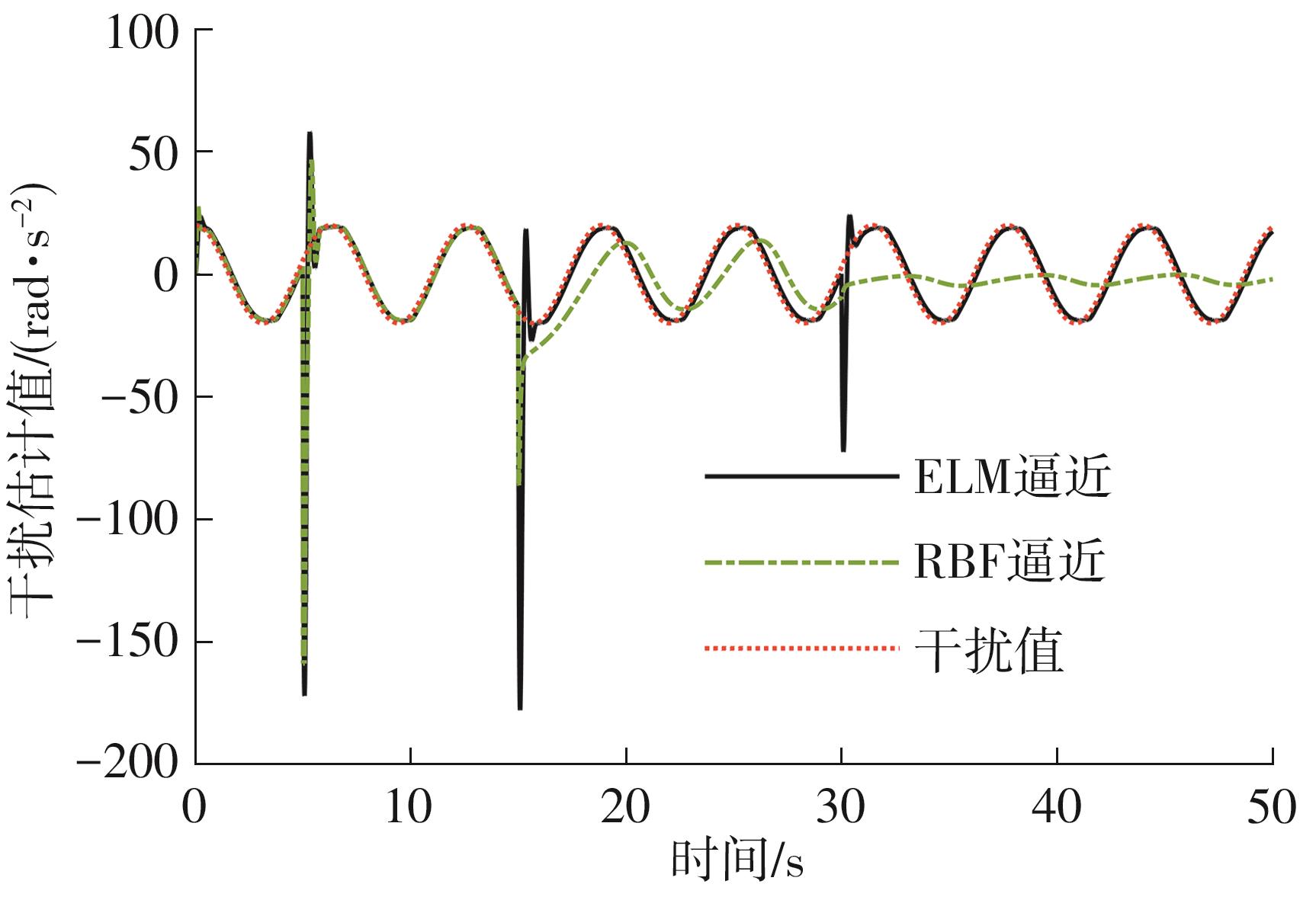

Fig.11
AGV prototype for experiment"
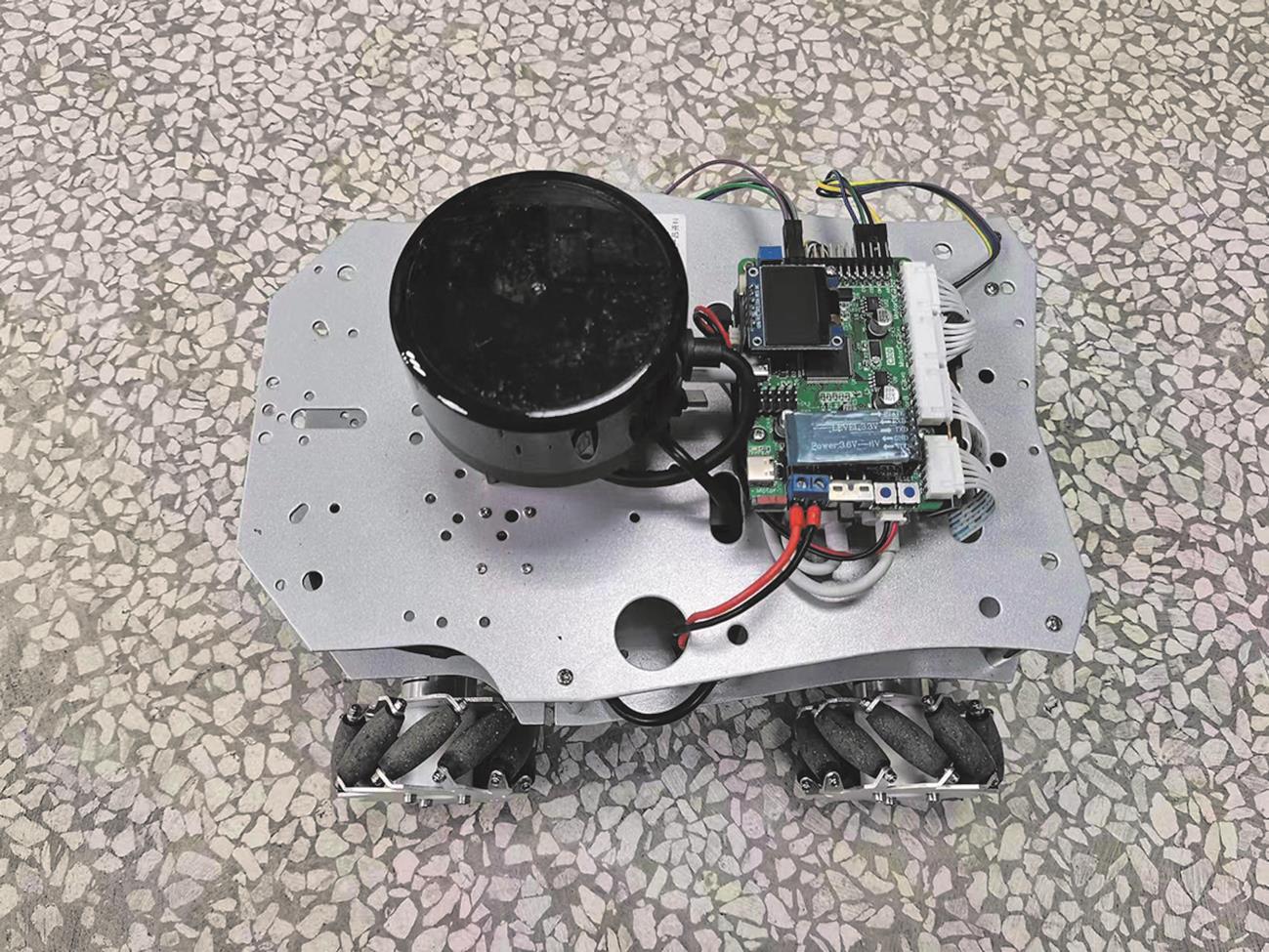
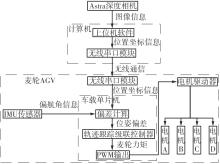
Fig.12
Experimental flowchart"
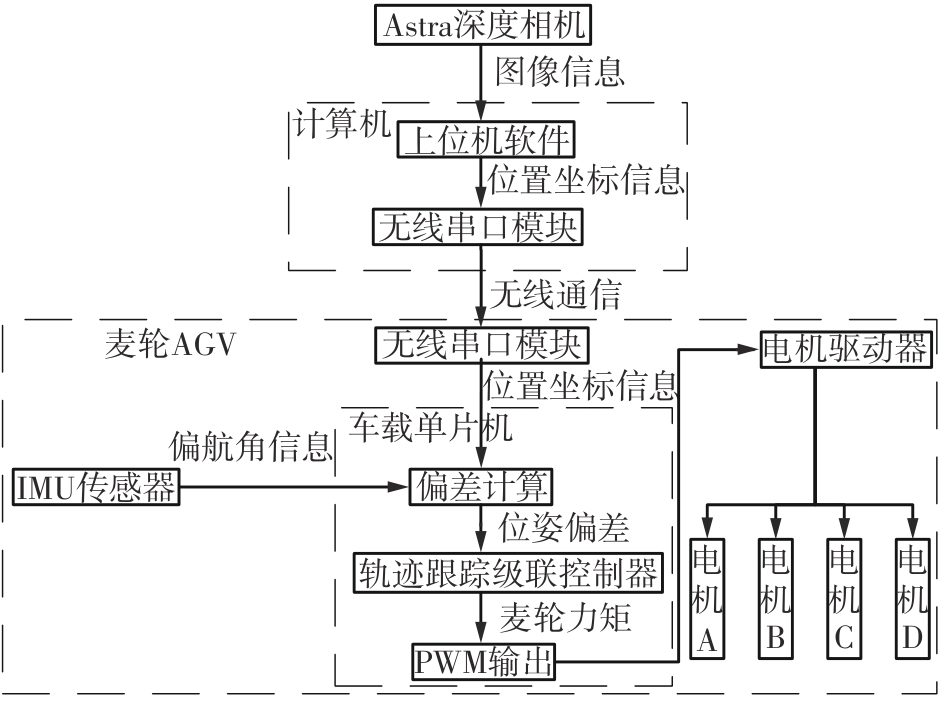
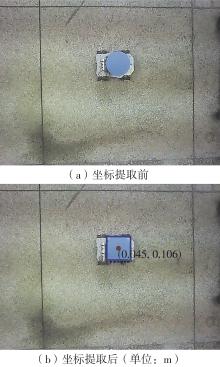
Fig.13
Comparison before and after coordinate extraction"
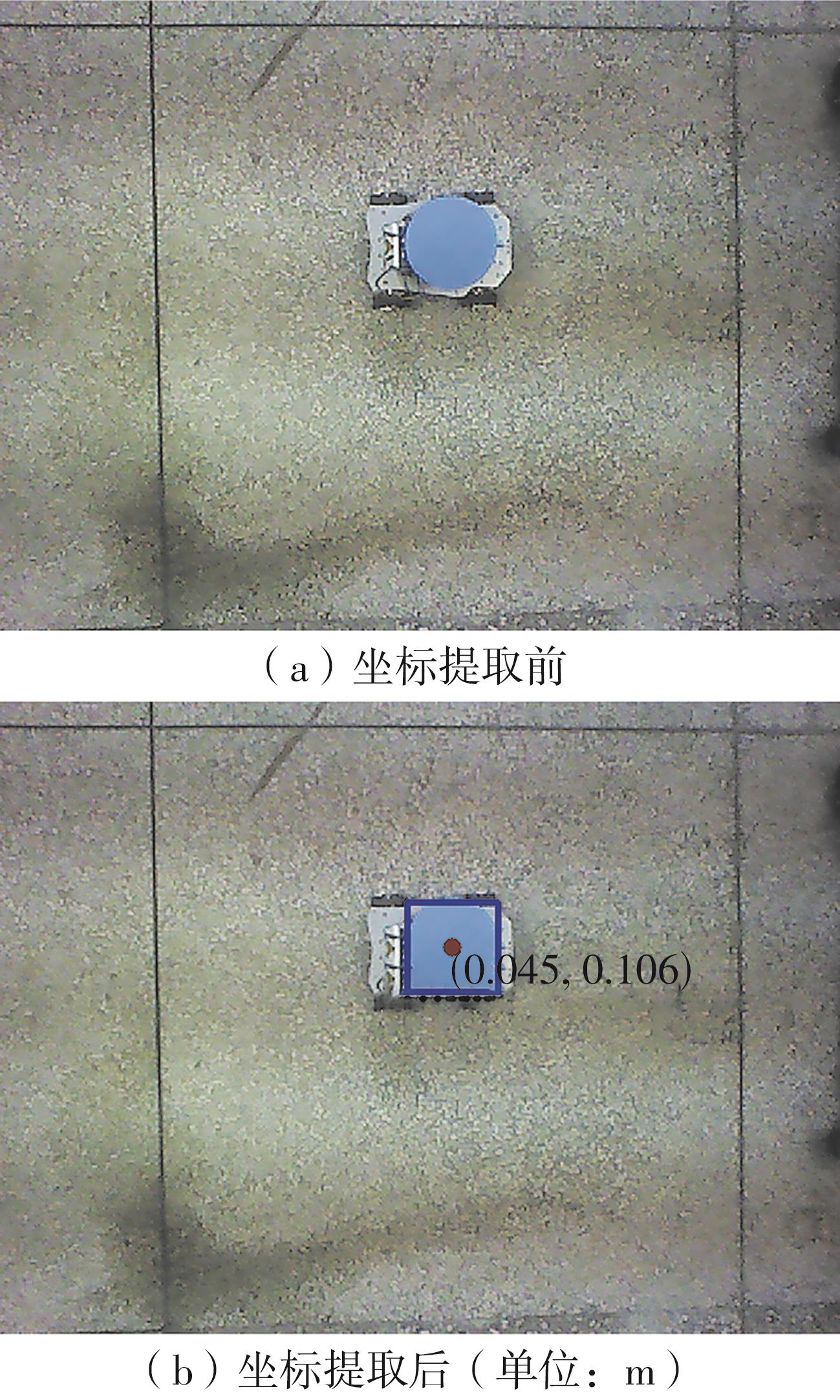
Fig.14
Actual experimental results"
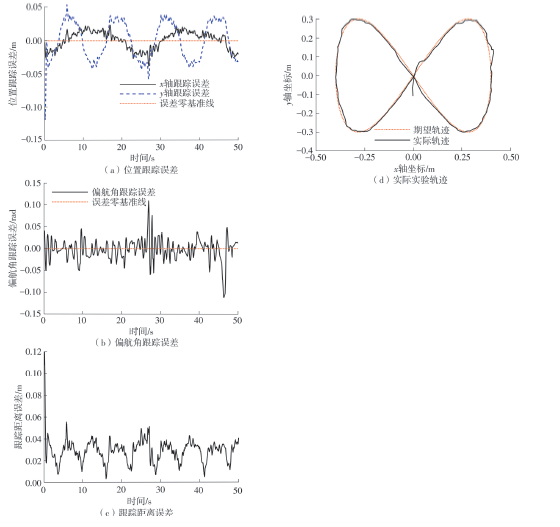
Table 3
Indexes of actual trajectory tracking errors"
| 跟踪误差 | 误差指标 | ||
|---|---|---|---|
| 最大值 | 平均值 | 标准差 | |
| 0.020 4 | 0.000 8 | 0.013 2 | |
| 0.038 8 | -0.000 2 | 0.028 6 | |
| 0.048 0 | -0.002 1 | 0.023 3 | |
| 0.043 2 | 0.029 4 | 0.011 2 | |
| 1 | 于赫年 .仓储式多AGV动态调度系统研究[D].北京:哈尔滨工业大学,2019. |
| 2 | 李彦文 .多AGV协同搬运的运动控制技术研究[D].南京:南京航空航天大学,2023. |
| 3 | CAO G, ZHAO X, YE C,et al .Fuzzy adaptive PID control method for multi-Mecanum-wheeled mobile robot[J].Journal of Mechanical Science and Technology,2022,36(4):2019-2029. |
| 4 | THAI N H, LY T T K, LONG N T,et al .Trajectory tracking using linear state feedback controller for a Mecanum wheel omnidirectional[C]∥Advances in Asian Mechanism and Machine Science:Proceedings of IFToMM Asian MMS 2021.Hanoi:Springer,2022:411-421. |
| 5 | ISLAM Z U, CHIDDARWAR S S, SAHOO S R .Design of robust backstepping controller for four-wheeled Mecanum mobile robot[C]∥Machines,Mechanism and Robotics:Proceedings of iNaCoMM 2019.[S.l.]:Springer,2022:1125-1134. |
| 6 | 王明明,朱莹莹,张磊,等 .麦克纳姆轮驱动的移动机器人自适应滑模控制器设计[J].西北工业大学学报,2018,36(4):627-635. |
| WANG Mingming, ZHU Yingying, ZHANG Lei,et al .An adaptive robust controller for a mobile robot driven by Mecanum wheels[J].Journal of Northwestern Polytechnical University,2018,36(4):627-635. | |
| 7 | ALAKSHENDRA V, CHIDDARWAR S S .Adaptive robust control of Mecanum-wheeled mobile robot with uncertainties[J].Nonlinear Dynamics,2017,87:2147-2169. |
| 8 | WOO C, LEE M, YOON T .Robust trajectory tracking control of a Mecanum wheeled mobile robot using impedance control and integral sliding mode control[J].The Journal of Korea Robotics Society,2018,13(4):256-264. |
| 9 | GALICKI M, BANASZKIEWICZ M .Optimal trajectory tracking control of omni-directional mobile robots[C]∥Proceedings of 2019 12th International Workshop on Robot Motion and Control.[S.l.]:IEEE,2019:137-142. |
| 10 | SUN Z, HU S, XIE H,et al .Fuzzy adaptive recursive terminal sliding mode control for an agricultural omnidirectional mobile robot[J].Computers and Electrical Engineering,2023,105:108529/1-18. |
| 11 | WANG D, WEI W, YEBOAH Y,et al .A robust model predictive control strategy for trajectory tracking of omni-directional mobile robots[J].Journal of Intelligent & Robotic Systems,2020,98:439-453. |
| 12 | LI Y, QIU L, WANG Z,et al .Adaptive model predictive control for trajectory tracking of Mecanum mobile robots[C]∥Proceedings of 2023 4th International Conference on Computer Engineering and Application.Hangzhou:IEEE,2023:804-808. |
| 13 | TANG M, LIN S, LUO Y .Mecanum wheel AGV trajectory tracking control based on efficient MPC algorithm[J].IEEE Access,2024,12:13763-13772. |
| 14 | 黄晓宇 .麦克纳姆轮AGV路径规划与轨迹跟踪算法研究[D].杭州:浙江科技学院,2022. |
| 15 | LU X, ZHANG X, ZHANG G,et al .Neural network adaptive sliding mode control for omnidirectional vehicle with uncertainties[J].ISA transactions,2019,86:201-214. |
| 16 | FAIZ M, SUMANTRI B, DEWANTARA B S B .Double loop controller of four Mecanum-wheel automated guided vehicle using SMC-PID[C]∥Proceedings of 2023 International Electronics Symposium.[S.l.]:IEEE,2023:305-310. |
| 17 | 王栋梁 .Mecanum轮式移动机器人轨迹跟踪及编队控制研究[D].广州:华南理工大学,2023. |
| 18 | YUAN Z, TIAN Y, YIN Y,et al .Trajectory tracking control of a four Mecanum wheeled mobile platform:an extended state observer-based sliding mode approach[J].IET Control Theory & Applications,2020,14(3):415-426. |
| 19 | JIANG M, CHEN L, WANG Y,et al .Adaptive backstepping control for Mecanum-wheeled omnidirectional vehicle using neural networks[J].IEEJ Transactions on Electrical and Electronic Engineering,2022,17(3):378-386. |
| 20 | ZHAO T, QIN P, ZHONG Y .Trajectory tracking control method for omnidirectional mobile robot based on self-organizing fuzzy neural network and preview strategy[J].Entropy,2023,25(2):248/1-15. |
| 21 | LU X, ZHANG X, ZHANG G,et al .Design of adaptive sliding mode controller for four-Mecanum wheel mobile robot[C]∥Proceedings of 2018 37th Chinese Control Conference.Wuhan:IEEE,2018:3983-3987. |
| 22 | 楼航飞 .应用于大部件的多AGV协同搬运控制系统的研究与开发[D].南京:南京航空航天大学,2021. |
| 23 | 江梦林,赵德权,孙永福,等 .麦克纳姆轮移动底盘的自适应滑模控制器设计[J].制造业自动化,2022,44(1):164-169. |
| JIANG Meng-lin, ZHAO De-quan, SUN Yong-fu,et al .Adaptive sliding mode controller design for Mecanum-wheeled mobile vehicle[J].Manufacturing Automation,2022,44(1):164-169. | |
| 24 | HUANG G B, CHEN L, SIEW C K .Universal approximation using incremental constructive feedforward networks with random hidden nodes[J].IEEE Transactions on Neural Networks,2006,17(4):879-892. |
| 25 | HUANG G B, WANG D H, LAN Y .Extreme learning machines:a survey[J].International Journal of Machine Learning and Cybernetics,2011,2:107-122. |
| [1] | JIN Wenzhou, ZHANG Yong, SUN Jie. Dynamic Scheduling of Demand Responsive Transit Based on Model Predictive Control [J]. Journal of South China University of Technology(Natural Science Edition), 2025, 53(6): 77-90. |
| [2] | ZHANG Yongshun, LIU Zhijun, LIU Zhenhu, WANG Li. Design and Disturbance Suppression of a Permanent Magnet Flexible Spherical Wrist Driven by Rotating Magnetic Coaxial Effect [J]. Journal of South China University of Technology(Natural Science Edition), 2025, 53(4): 102-112. |
| [3] | NING Jun, MA Yifan, LI Wei, et al. Adaptive Fuzzy Tracking Control of Unmanned Surface Vehicle with State and Input Quantization [J]. Journal of South China University of Technology(Natural Science Edition), 2024, 52(5): 52-61. |
| [4] | CHEN Zhong, QIU Yuliang, ZHANG Xianmin. Optimization Design and Experiment of XY Compliant Platform with Local Resonance Damping [J]. Journal of South China University of Technology(Natural Science Edition), 2024, 52(12): 1-13. |
| [5] | LEI Yu, HUANG Yifan, LUO Xuedong, et al.. Prediction of Soil Thermal Conductivity Based on NMI-FA-DELM Model [J]. Journal of South China University of Technology(Natural Science Edition), 2023, 51(9): 129-138. |
| [6] | LI Xinkai, HU Xiaocheng, MA Ping, et al.. Driverless Obstacle Avoidance and Tracking Control Based on Improved DDPG [J]. Journal of South China University of Technology(Natural Science Edition), 2023, 51(11): 44-55. |
| [7] | LIN Yongjie, CHEN Ning, LU Kai. Vehicle Trajectory Tracking at Intersections Based on Millimeter Wave Radar Point Cloud [J]. Journal of South China University of Technology(Natural Science Edition), 2023, 51(10): 110-125. |
| [8] | YAO Qiangqiang, TIAN Ying, WANG Shengyuan, et al. Research on Path Tracking Control Strategy of Intelligent Vehicles Based on Force Drive [J]. Journal of South China University of Technology(Natural Science Edition), 2022, 50(2): 33-41,57. |
| [9] | WANG Chengwen, GUO Xinping, ZHANG Zhenyang, et al. Intelligent Control Method for Pump-Valve Parallel Electro-Hydraulic Position Servo System [J]. Journal of South China University of Technology (Natural Science Edition), 2021, 49(3): 25-33. |
| [10] | Chao-Yi Li. Model predicted control for underactuated ship path following based on extended state observer [J]. Journal of South China University of Technology(Natural Science Edition), 2021, 49(12): 143-152. |
| [11] | LUO Yutao, GUO Haiwen. Adaptive Neural Network Sliding Mode Control for Steer-by-Wire System [J]. Journal of South China University of Technology (Natural Science Edition), 2021, 49(1): 65-73. |
| [12] | ZHANG Jiaxu, YANG Xiong, SHI Zhengtang, et al. Path Planning and Tracking Control for Emergency Lane Change and Obstacle Avoidance of Vehicles [J]. Journal of South China University of Technology(Natural Science Edition), 2020, 48(9): 86-93,106. |
| [13] | QIN Wu, KANG Yingzi, SHANGGUAN Wenbin, et al. Study on Sliding Mode Control with Disturbance Observer Integrating Skyhook Model for Active Suspension Systems [J]. Journal of South China University of Technology (Natural Science Edition), 2020, 48(6): 16-24,33. |
| [14] | YIN Huajie, GUO Zhiyu, ZENG Jun. Simplified Predictive Torque Control for Induction Motor with Sliding Mode Speed-Sensorless [J]. Journal of South China University of Technology(Natural Science Edition), 2020, 48(12): 18-26. |
| [15] | YAN Jia, CHEN Feiyue, YI Ruonan, et al. Drift Compensation for Electronic Nose Based on Sample Distribution Weighting Cross Domain Extreme Learning Machine [J]. Journal of South China University of Technology (Natural Science Edition), 2020, 48(12): 105-113. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||