| [1] |
GAO B, WAN K, CHEN Q, et al .A review and outlook on predictive cruise control of vehicles and typical applications under cloud control system[J].Machine Intelligence Research, 2023, 20(5): 614-639.
|
| [2] |
BAO Z, HOSSAIN S, LANG H, et al .High-definition map generation technologies for autonomous driving[EB/OL].(2022-06-24)[2025-11-10].arXiv preprint,2022:arXiv:.
|
| [3] |
DONG J, XU Q, WANG H, et al .Mixed cloud control testbed:validating vehicle-road-cloud integration via mixed digital twin[J].IEEE Transactions on Intelligent Vehicles, 2023, 8(4): 2723-2736.
|
| [4] |
冯昶,杜清运,范晓宇,等 .高精动态地图基础平台众源更新技术路线研究[J].测绘地理信息,2023,48(1): 10-15.
|
|
FENG Chang, DU Qingyun, FAN Xiaoyu, et al .A crowdsourcing update technology route of HD dynamic map basic platform[J].Journal of Geomatics,2023,48(1): 10-15.
|
| [5] |
SUNG I, CHOI B, NIELSEN P .On the training of a neural network for online path planning with offline path planning algorithms[J].International Journal of Information Management, 2021, 57: 102142/1-9.
|
| [6] |
NOTO M, SATO H .A method for the shortest path search by extended Dijkstra algorithm[C]∥Proceedings of the 2000 IEEE International Conference on Systems,Man and Cybernetics.Nashville:IEEE,2000: 8-11.
|
| [7] |
ZHANG Z, ZHAO Z .A multiple mobile robots path planning algorithm based on A-star and Dijkstra algorithm[J].International Journal of Smart Home,2014,8(3):75-86.
|
| [8] |
SCHMERLING E, JANSON L, PAVONE M .Optimal sampling-based motion planning under differential constraints: the drift case with linear affine dynamics[C]∥Proceedings of the 54th IEEE Conference on Decision and Control.Osaka: IEEE, 2015: 5-18.
|
| [9] |
KUFFNER J, LAVALLE S .RRT-connect: an efficient approach to single-query path planning[C]∥Proceedings of the 2 000 IEEE International Conference on Robotics and Automation.San Francisco:IEEE,2 000:995-1001.
|
| [10] |
REDDY T, SUPREETHI K .Optimization of K-means algorithm: ant colony optimization[C]∥Proceedings of the 2017 International Conference on Computing Methodologies and Communication.Erode:IEEE,2017:530-535.
|
| [11] |
XIN J, ZHONG J, YANG F, et al .An improved genetic algorithm for path-planning of unmanned surface vehicle[J].Sensors, 2019, 19(11): 2640/1-23.
|
| [12] |
PADEN B, ČÁP M, YONG S Z, et al .A survey of motion planning and control techniques for self-driving urban vehicles[J].IEEE Transactions on Intelligent Vehicles, 2016, 1(1): 33-55.
|
| [13] |
DUBINS L .On curves of minimal length with a constraint on average curvature, and with prescribed initial and terminal positions and tangents[J].American Journal of Mathematics, 1957, 79(3): 497-516.
|
| [14] |
REEDS J, SHEPP L .Optimal paths for a car that goes both forward and backward[J].Pacific Journal of Mathematics, 1991, 145(2): 367-393.
|
| [15] |
WANG S, WANG Y, TAN M, et al .Path planning of underwater biomimetic robot[M]∥Underwater Biomimetic Vehicle-Manipulator System.Singapore:Springer,2023: 89-125.
|
| [16] |
LIANG Z, ZHENG G, LI J .Automatic parking path optimization based on Bezier curve fitting[C]∥Proceedings of the 2012 IEEE International Conference on Automation and Logistics.Zhengzhou:IEEE,2012:583-587.
|
| [17] |
ZIEGLER J, BENDER P, DANG T, et al .Trajectory planning for Bertha—a local, continuous method[C]∥Proceedings of the 2014 IEEE Intelligent Vehicles Symposium.Dearborn:IEEE,2014:450-457.
|
| [18] |
WERLING M, KAMMEL S, ZIEGLER J, et al .Optimal trajectories for time-critical street scenarios using discretized terminal manifolds[J].The International Journal of Robotics Research, 2012, 31(3):346-359.
|
| [19] |
YU L, SHAO X, WEI Y, et al .Intelligent land-vehicle model transfer trajectory planning method based on deep reinforcement learning[J].Sensors,2018,18(9): 2905/1-22.
|
| [20] |
CHAI R, LIU D, LIU T, et al .Deep learning-based trajectory planning and control for autonomous ground vehicle parking maneuver[J].IEEE Transactions on Automation Science and Engineering, 2023,20(3): 1633-1647.
|
| [21] |
VASWANI A, SHAZEER N, PARMAR N, et al .Attention is all you need[C]∥Proceedings of 31st Conference on Neural Information Processing Systems.Long Beach: NIPS, 2017: 6000-6010.
|
| [22] |
BARMPOUNAKIS E, GEROLIMINIS N .On the new era of urban traffic monitoring with massive drone data: the pNEUMA large-scale field experiment[J].Transportation Research Part C: Emerging Technologies, 2020, 111: 50-71.
|
| [23] |
WERLING M, ZIEGLER J, KAMMEL S, et al .Optimal trajectory generation for dynamic street scenarios in a frenét frame[C]∥Proceedings of the 2010 IEEE International Conference on Robotics and Automation.Anchorage: IEEE, 2010: 987-993.
|
| [24] |
MCNAUGHTON M, URMSON C, DOLAN J, et al .Motion planning for autonomous driving with a conformal spatiotemporal lattice[C]∥Proceedings of the 2011 IEEE International Conference on Robotics and Automation.Shanghai: IEEE, 2011: 4889-4895.
|
| [25] |
PIVTORAIKO M, KELLY A .Differentially constrained motion replanning using state lattices with graduated fidelity[C]∥Proceedings of the 2008 IEEE/RSJ International Conference on Intelligent Robots and Systems.Nice: IEEE, 2008: 2611-2616.
|
| [26] |
ZIEGLER J, BENDER P, SCHREIBER M, et al .Making bertha drive—an autonomous journey on a historic route[J].IEEE Intelligent Transportation Systems Magazine, 2014, 6(2): 8-20.
|
| [27] |
ZHOU Z, YE L, WANG J, et al .HiVT: Hierarchical vector transformer for multi-agent motion prediction[C]∥Proceedings of the 2022 IEEE/CVF Confe-rence on Computer Vision and Pattern Recognition.New Orleans: IEEE, 2022: 8813-8823.
|
| [28] |
MERCY T, van PARYS R, PIPELEERS G .Spline-based motion planning for autonomous guided vehicles in a dynamic environment[J].IEEE Transactions on Control Systems Technology,2017, 26(3):1-8.
|
| [29] |
LI A, XU Z, LI W, et al .Urban signalized intersection traffic state prediction:a spatial-temporal graph model integrating the cell transmission model and transformer[J].Applied Sciences,2025,15(5):2377/1-23.
|
| [30] |
HAMED M, AL-MASAEID H, SAID Z .Short-term prediction of traffic volume in urban arterials[J].Journal of Transportation Engineering,1995,121(3):249-254.
|
| [31] |
DRUCKER H, BURGES C, KAUFMAN L, et al .Support vector regression machines[J].Advances in Neural Information Processing Systems, 1997, 9:779-784.
|
| [32] |
ATHEY S, TIBSHIRANI J, WAGER S .Genera-lized random forests[J].The Annals of Statistics,2019, 47(2): 1148-1178.
|
| [33] |
YE Q, WONG S, SZETO W .Short-term traffic speed forecasting based on data recorded at irregular intervals[C]∥Proceedings of 2010 13th International IEEE Annual Conference on Intelligent Transportation Systems. Madeira Island: IEEE,2010: 1541-1546.
|
| [34] |
XU Y, LU Y, JI C, et al .Adaptive graph fusion convolutional recurrent network for traffic forecasting[J].IEEE Internet of Things Journal,2023,10(13):11465-11475.
|
| [35] |
WU Z, PAN S, LONG G, et al .Graph wavenet for deep spatial-temporal graph modeling[EB/OL].(2019-03-31)[2025-11-10].arXiv preprint, 2019: arXiv:.
|
| [36] |
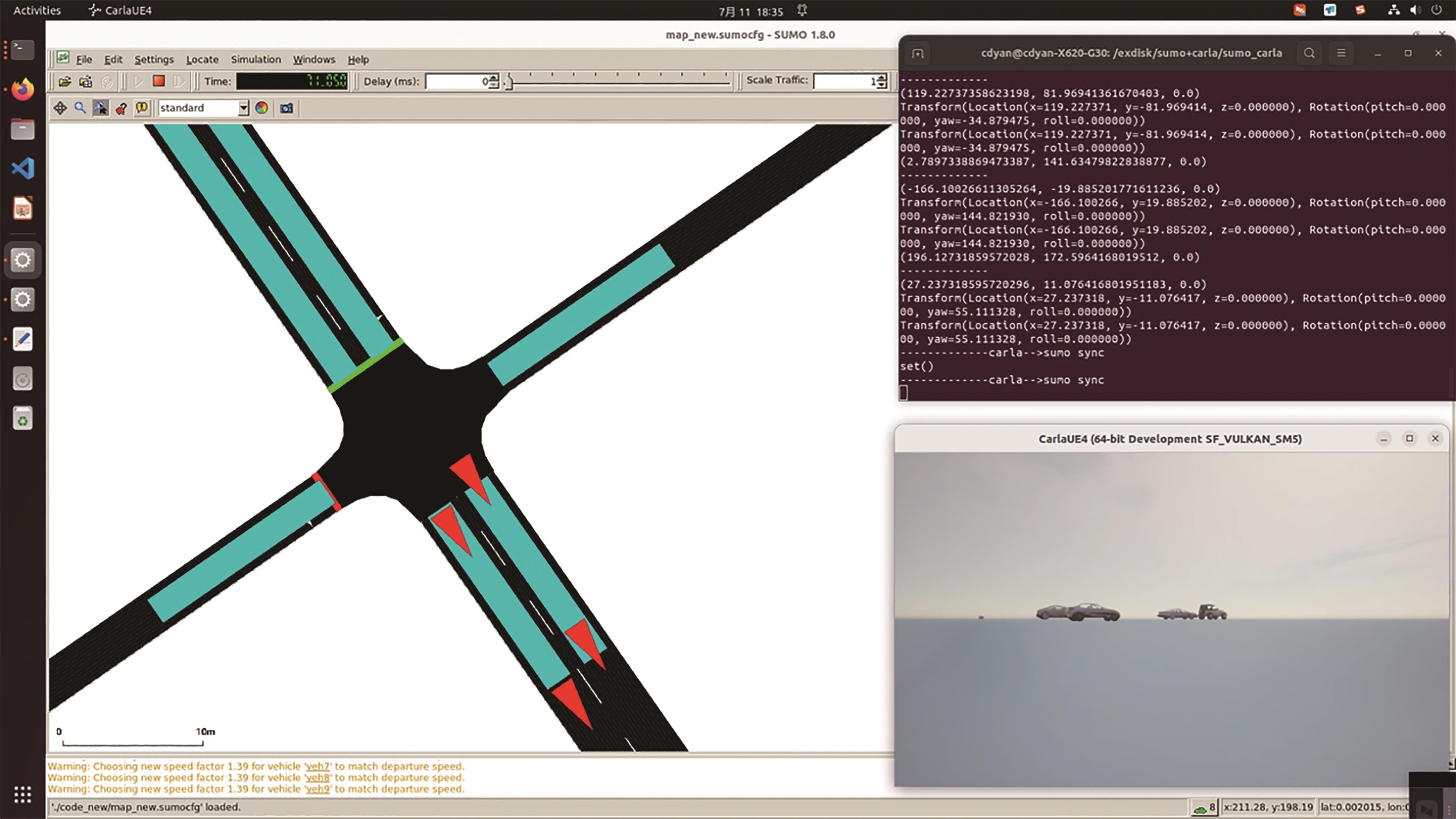
LOPEZ P, BEHRISCH M, BIEKER-WALZ L,et al .Microscopic traffic simulation using SUMO[C]∥Proceedings of the 2018 21st International Conference on Intelligent Transportation Systems.Maui:IEEE,2018:2575-2582.
|
| [37] |
DOSOVITSKIY A, ROS G, CODEVILLA F, et al .CARLA: an open urban driving simulator[C]∥Proceedings of the 1st Conference on Robot Learning.Mountain View: PMLR, 2017: 1-16.
|
| [38] |
FAN H, ZHU F, LIU C, et al .Baidu Apollo EM motion planner[EB/OL].(2018-07-20)[2025-11-10].arXiv preprint,2018:arXiv:.
|
| [39] |
WESTHOFEN L, NEUROHR C, KOOPMANN T,et al .Criticality metrics for automated driving: a review and suitability analysis of the state of the art[J].Archives of Computational Methods in Engineering,2023,30(1):1-35.
|