华南理工大学学报(自然科学版) ›› 2026, Vol. 54 ›› Issue (3): 31-51.doi: 10.12141/j.issn.1000-565X.250188
自动驾驶汽车交互场景学习型生成方法研究进展
熊璐, 冯浩杰, 张培志, 田梦杰, 张心睿
- 同济大学 汽车与能源学院/新能源汽车工程中心,上海 201804
-
收稿日期:2025-06-30出版日期:2026-03-25发布日期:2025-09-12 -
通信作者:张培志(1988—),男,博士,工程师,主要从事智能网联汽车测试、智能车辆控制研究。 E-mail:zhangpeizhi@tongji.edu.cn -
作者简介:熊璐(1978—),男,教授,博士生导师,主要从事新能源汽车底盘动力学控制、智能网联汽车测试研究。E-mail: xiong_lu@tongji.edu.cn -
基金资助:国家重点研发计划项目(2024YFB2505704)
Research Advances in Learning-Based Generative Methods for Interactive Scenarios of Autonomous Vehicles
XIONG Lu, FENG Haojie, ZHANG Peizhi, TIAN Mengjie, ZHANG Xinrui
- College of Automotive and Energy/Clean Energy Automotive Engineering Centre,Tongji University,Shanghai 201804,China
-
Received:2025-06-30Online:2026-03-25Published:2025-09-12 -
Contact:张培志(1988—),男,博士,工程师,主要从事智能网联汽车测试、智能车辆控制研究。 E-mail:zhangpeizhi@tongji.edu.cn -
About author:熊璐(1978—),男,教授,博士生导师,主要从事新能源汽车底盘动力学控制、智能网联汽车测试研究。E-mail: xiong_lu@tongji.edu.cn -
Supported by:the National Key R & D Program of China(2024YFB2505704)
摘要:
交互场景因其高维复杂性和高风险性,成为自动驾驶汽车测试与运行中的关键安全挑战之一。近年来,以数据生成、对抗生成、知识生成及大语言模型为代表的学习型场景生成方法凭借较高的真实性与覆盖广度,在提升交互场景生成质量与测试验证效率方面展现出显著优势。为系统梳理该领域的研究进展、核心技术与瓶颈问题,该文对自动驾驶交互场景的学习型生成方法进行全面综述,可为后续研究提供清晰的技术脉络与发展方向。首先,概述交互场景的基本特征,并对主流公开数据集进行对比分析,探讨其对学习型生成方法的支撑作用;同时,总结交互相关的标准规范、场景描述与衡量指标,分析其对交互行为表达能力的影响;其次,从传统学习方法与大语言模型方法两个方向出发,归纳各类方法的技术路线与生成效果;最后,结合现有成果,总结当前学习型生成方法在数据和方法等方面面临的挑战,展望未来的研究方向。研究发现,传统学习方法在真实性与多样性的平衡、安全关键场景的高效发现与生成方面存在固有挑战;大语言模型方法虽在场景语义理解和复杂逻辑构建上展现出卓越潜力,但普遍面临推理速度慢、信息虚构、生成内容与物理世界对齐困难以及决策过程“黑盒”特性导致的可解释性不足等瓶颈。此外,当前研究仍共同受制于现有数据集缺乏交互关键信息、场景严重性缺少统一衡量标准等基础性问题。该文认为,尽管已有方法在交互建模上取得了初步成果,但仍需进一步提升生成质量与泛化能力,以满足自动驾驶汽车实际需求。
中图分类号:
引用本文
熊璐, 冯浩杰, 张培志, 田梦杰, 张心睿. 自动驾驶汽车交互场景学习型生成方法研究进展[J]. 华南理工大学学报(自然科学版), 2026, 54(3): 31-51.
XIONG Lu, FENG Haojie, ZHANG Peizhi, TIAN Mengjie, ZHANG Xinrui. Research Advances in Learning-Based Generative Methods for Interactive Scenarios of Autonomous Vehicles[J]. Journal of South China University of Technology(Natural Science Edition), 2026, 54(3): 31-51.
图1
交互数据集处理流程"
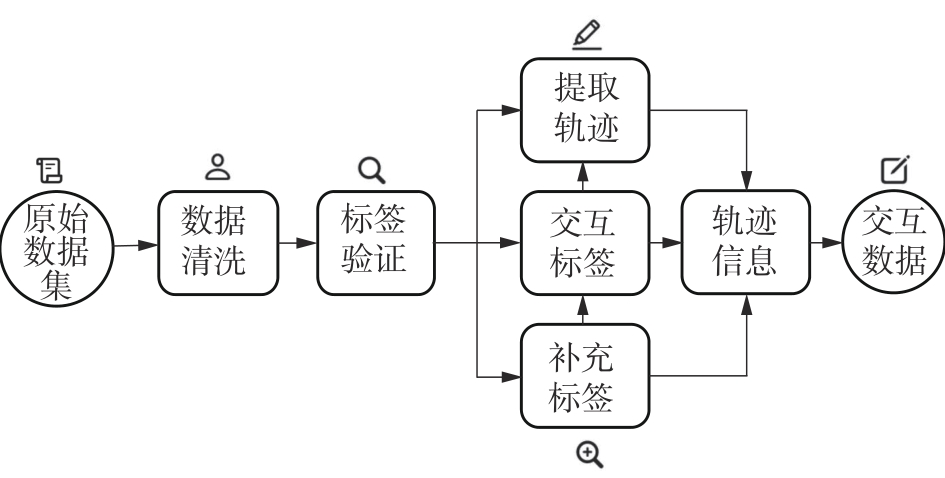
表1
交互数据集对比"
| 数据集名称 | 交互轨迹 | 交互标注 | 交互路段 | 交互的交通参与者类型 | 应用情况 |
|---|---|---|---|---|---|
| NGSIM[ | 有 | 无 | G,C | j,f | U |
| KITTI[ | 无 | 有 | G,C,X | j,x,f | T |
| DDD17[ | 无 | 无 | G,C | j,x,f | P |
| HighD[ | 有 | 有 | G | j | U |
| HDD[ | 有 | 有 | G,C,J | j,x,f | T |
| BDD100K[ | 有 | 有 | G,C,X,J | j,x,f | U |
| ApolloScape[ | 有 | 有 | G,C,X | j,x,f | U |
| LyftLevel5(L5)[ | 有 | 有 | G,C | j,x,f | U |
| Argoverse[ | 有 | 有 | G,C,X | j,x,f | U |
| INTERACTION[ | 有 | 无 | G,C | j,x | U |
| PIE[ | 无 | 有 | C | x | T |
| H3D[ | 无 | 有 | G,C | j,x,f | T |
| PREVENTION[ | 有 | 有 | G | j,x,f | U |
| A*3D[ | 无 | 有 | G,C | j,x,f | T |
| DrivingStereo[ | 无 | 无 | G,C,X,J | j,x | P |
| TITAN[ | 有 | 有 | C | j,x,f | U |
| InD[ | 有 | 有 | C | j,x,f | U |
| RounD[ | 有 | 有 | C | j,x,f | U |
| FordMulti-AVSeasonal[ | 无 | 有 | G,C | j,x,f | T |
| Car Crash Dataset(CCD)[ | 无 | 有 | C | j,x,f | T |
| nuScenes[ | 无 | 有 | C | j,x,f | T |
| JAAD[ | 无 | 有 | C,X | j,x,f | T |
| DoTA[ | 无 | 有 | G,C,X | j,x,f | T |
| Mirror-Traffic[ | 有 | 有 | G,C | j,x,f | U |
| ExiD[ | 有 | 有 | G | j | U |
| UniD[ | 有 | 有 | U | j,x,f | U |
| WoodScape[ | 无 | 有 | G,C | j,x,f | T |
| Argoverse2[ | 有 | 有 | G,C | j,x,f | U |
| Waymo Open Motion[ | 有 | 有 | G,C | j,x,f | U |
| nuPlan[ | 有 | 有 | C | j,x,f | U |
| ROAD[ | 无 | 有 | C | j,x,f | T |
| ONCE[ | 无 | 有 | G,C,J | j,x,f | T |
| CitySim[ | 有 | 有 | G,C | j,x,f | U |
| YouTube Driving[ | 无 | 有 | C,X | j,x,f | T |
| DRAMA[ | 无 | 有 | C | j,x,f | T |
| DAIR-V2X[ | 无 | 有 | G,C | j,x,f | T |
| A9-Dataset[ | 无 | 有 | G | j,x,f | T |
| MONA[ | 有 | 有 | G,C | j | U |
| SIND[ | 有 | 有 | C | j,x,f | U |
| Ubiquitous Traffic Eyes[ | 有 | 有 | C | j | U |
| OATS[ | 无 | 无 | C,J | j,x,f | P |
| TUMTrafIntersection[ | 无 | 有 | C | j,x,f | T |
| TJRDTS全域轨迹[ | 有 | 有 | G | j | U |
| TUMTrafEvent[ | 有 | 有 | C | j,x,f | U |
| TUMTrafV2X[ | 有 | 有 | C | j,x,f | U |
| InterHub[ | 有 | 有 | G,C | j,x,f | U |
| DrivingDojo[ | 无 | 无 | G,C,X | j,x,f | P |
图2
交互场景传统学习生成方法综合对比"
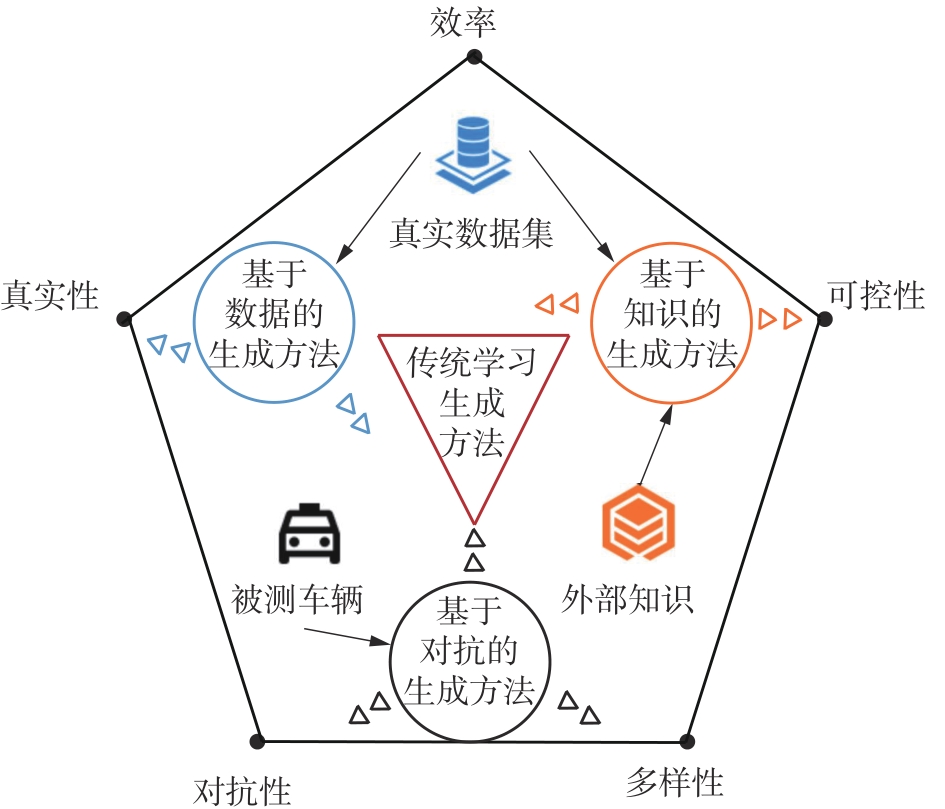
图3
交互场景GNN结构示意图"

图4
模仿学习生成场景示意图"

图5
交互场景仿真生成效果图"

表2
典型基于数据的生成方法的定量对比"
| 典型方法 | 真实性 | 多样性 |
|---|---|---|
| 结合GNN和分布匹配损失[ | KID达0.072 FID达111.6 | 无 |
| 语法驱动无监督学习真实场景[ | KID达0.054 FID达99.7 | 无 |
| 结合扩散模型和轨迹预测模型[ | FID最优达35.75 | 与真实数据多样性差异百分比为1.25% |
| 利用GNN学习交通参与者行为[ | TRV达2.77%minSFDE达1.13 mminSADE达0.57 m | 地图感知的多样性指标达2.5 m |
| 基于扩散Transformer多智能体架构[ | 交互TTC达0.846ADE达2.045 mMinADE达1.472 m | 无 |
图6
单主体强化学习示意图"
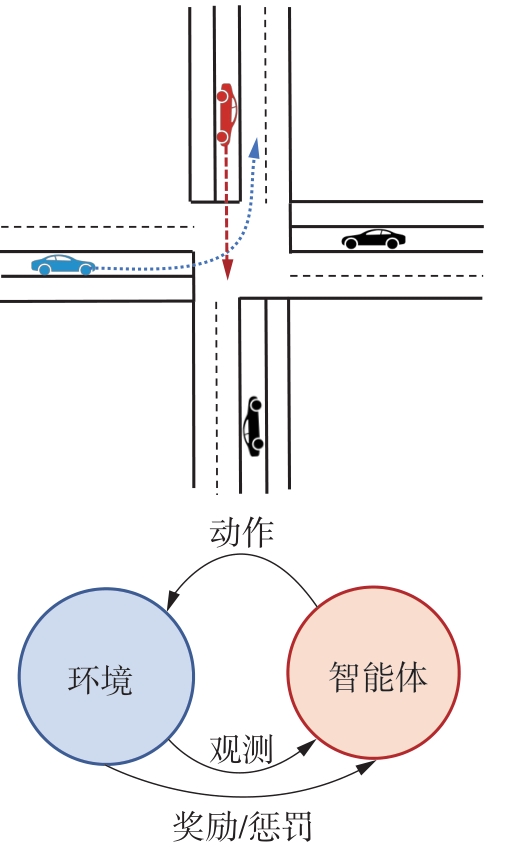
图7
多主体强化学习示意图"
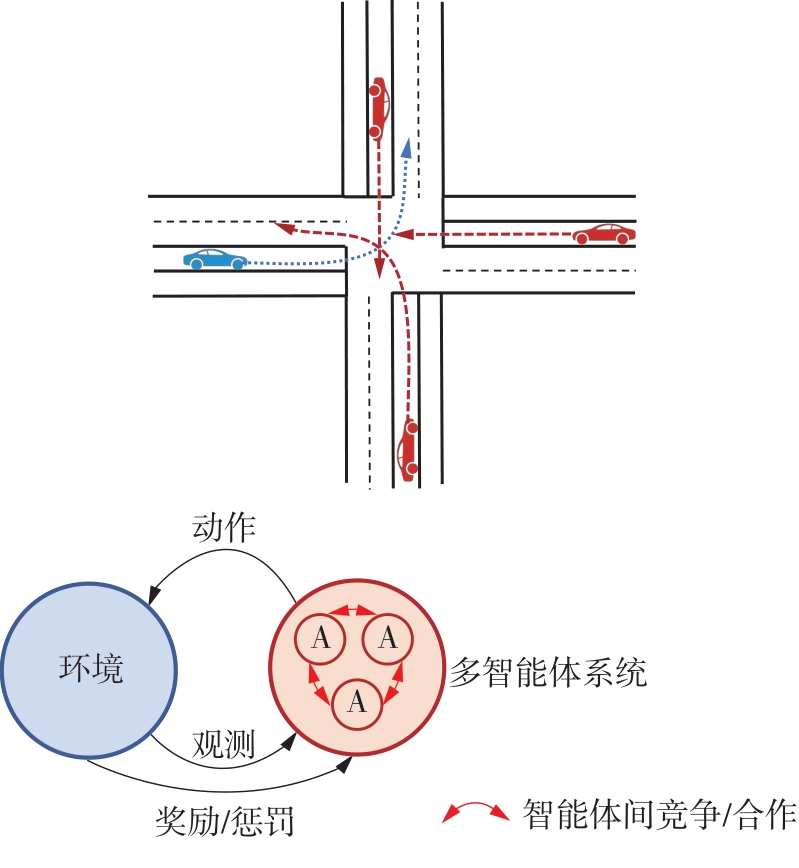
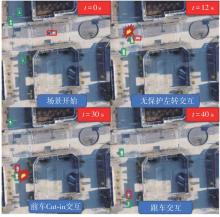
图8
交互场景实车生成效果图"
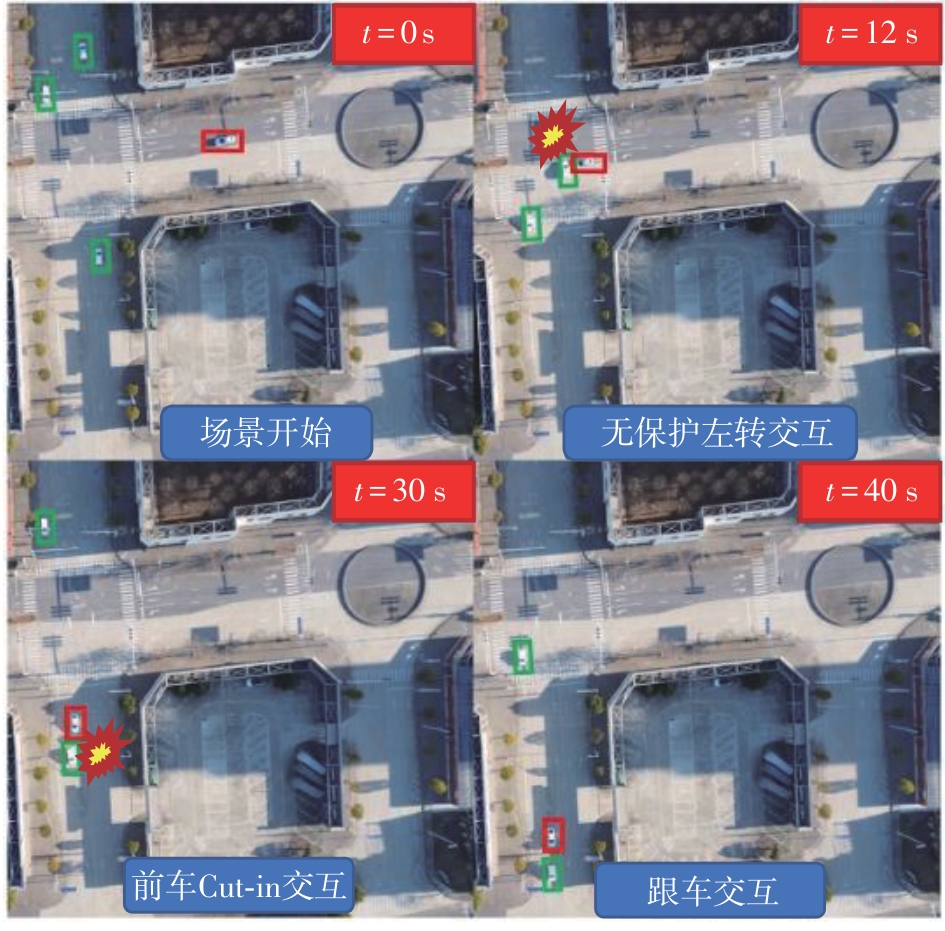
表3
典型基于对抗生成方法的定量对比"
| 典型方法 | 对抗性 | 效率 | 多样性 |
|---|---|---|---|
| 利用强化学习保持交通参与者行为自然且具有对抗性[ | CR达每400 m0.046次 | 测试约加速6 000倍;节约里程约5 632.7万km | 全面无偏地生成美国FARS标准的5种高速公路事故场景 |
| 通过深度强化学习驱动交通参与者最大化碰撞概率[ | CR达0.286TTC < 1 sBBD < 5 m | 无 | 覆盖美国FARS标准的5种高速公路事故场景中的4个 |
| 设计多智能体强化学习合作与竞争机制[ | CR达90.6% | 100次训练即可生成有效的对抗策略 | 无 |
| 采用自回归生成交通场景模块[ | CR达89% | 200次迭代即可稳定生成场景 | 场景类型覆盖多种风险场景(如左转、右转、闯红灯等) |
| 在扩散模型去噪过程中引入多步对抗优化[ | CR达0.58IR达0.61 | 无 | 无 |
| 基于扩散模型优化对抗的目标函数[ | CR达0.64IR达0.69 | 无 | 无 |

图9
扩散模型生成场景效果图"
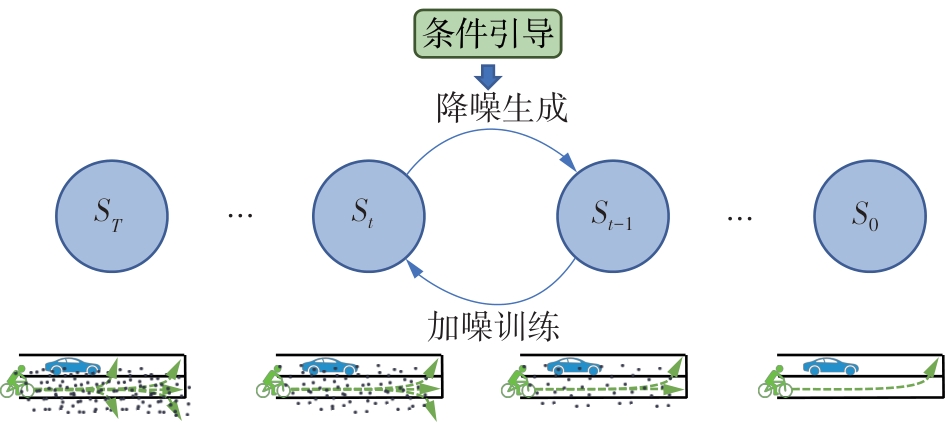
表4
典型基于知识生成方法定量对比"
| 典型方法 | 真实性 | 可控性 |
|---|---|---|
| 通过知识驱动本体建模并利用强化学习提取特征[ | dmin:0.69~2.9 m vd:20.38~22.1 m/s | 按需生成4类指定逻辑场景 |
| 扩散模型的去噪过程中结合行为先验知识[ | 虚拟现实得分达0.720 minADE达1.474 | 引导后CR从2.47%降低到1.11% |
| 将显式知识整合到树结构变分自编码器模型生成场景[ | 规则违反率 < 5% | 重建误差达0.21 |
表5
典型LLM应用方法的定量对比"
| 典型方法 | 真实性 | 对抗性 | 多样性 | 可控性 | 效率 |
|---|---|---|---|---|---|
| 利用LLM结合Transformer解码器架构[ | mADE达1.329;MMD最优达0.061 6;mFDE达2.838 | CR最优达52.35% | 场景多样性达0.76 | 人类评估中偏好率超90%;评分最高达4.3 | 无 |
| 通过对比学习训练自编码器提取行为嵌入[ | mADE达1.54;mFDE达1.21 | CR最优达59% | 无 | 人类评估中偏好率100%;评分最高达4.27 | 无 |
| 联合LLM与扩散模型生成语义地图及动态轨迹[ | mADE达2.59;mFDE达3.64 | CR最优达39% | 场景多样性达0.93 | 无 | 生成1 000个边缘案例需0.75图形计算单元运行小时数 |
| 利用用户指令设计条件扩散模型损失函数[ | mADE达1.73;mFDE达4.02 | 无 | 无 | 规则违反率<0.052 | 每个场景1 min |
| 通过链式推理机制将复杂场景分解为层次化事件结构[ | mADE达1.17;mFDE达1.93 | 无 | 无 | 生成成功率85%~95% | 无 |
| 利用上下文将自然语言映射为Carla环境的配置文件[ | ADE最优达0.033;FDE最优达0.058 | 无 | 无 | 无 | 每个场景28.8 s |
| 通过RAG技术优化道路结构生成[ | 无 | 自动驾驶汽车路线完成率为0.42;自动驾驶汽车驾驶得分为40.22;自动驾驶汽车成功率为0.50 | 无 | 生成成功率70%~80% | 每个场景67.90 s |
| 设计多模态生成系统整合文本、图像与视频输入[ | 与真实场景整体相似度高达93%左右 | 自动驾驶汽车路线完成率为0.86;自动驾驶汽车驾驶得分为65.24;自动驾驶汽车成功率为0.76 | 车辆航向角标准差达69.77 | 最优生成成功率达87% | 无 |
| 利用VLM解析事故草图与文本,提取车辆轨迹与碰撞语义[ | 初始位置准确率从小于0.2提升至大于0.6 | CR最优达92% | 无 | 150个真实美国国家交通安全管理局(NHTSA)样本成功率92% | 无 |
| 设计LLM多智能体攻击框架[ | 与真实车辆加速度相对熵达0.011 2;异常急动率达1.836% | 攻击成功率达50.83% | 无 | 无 | 每个场景0.263 s |

图10
RAG流程示意图"
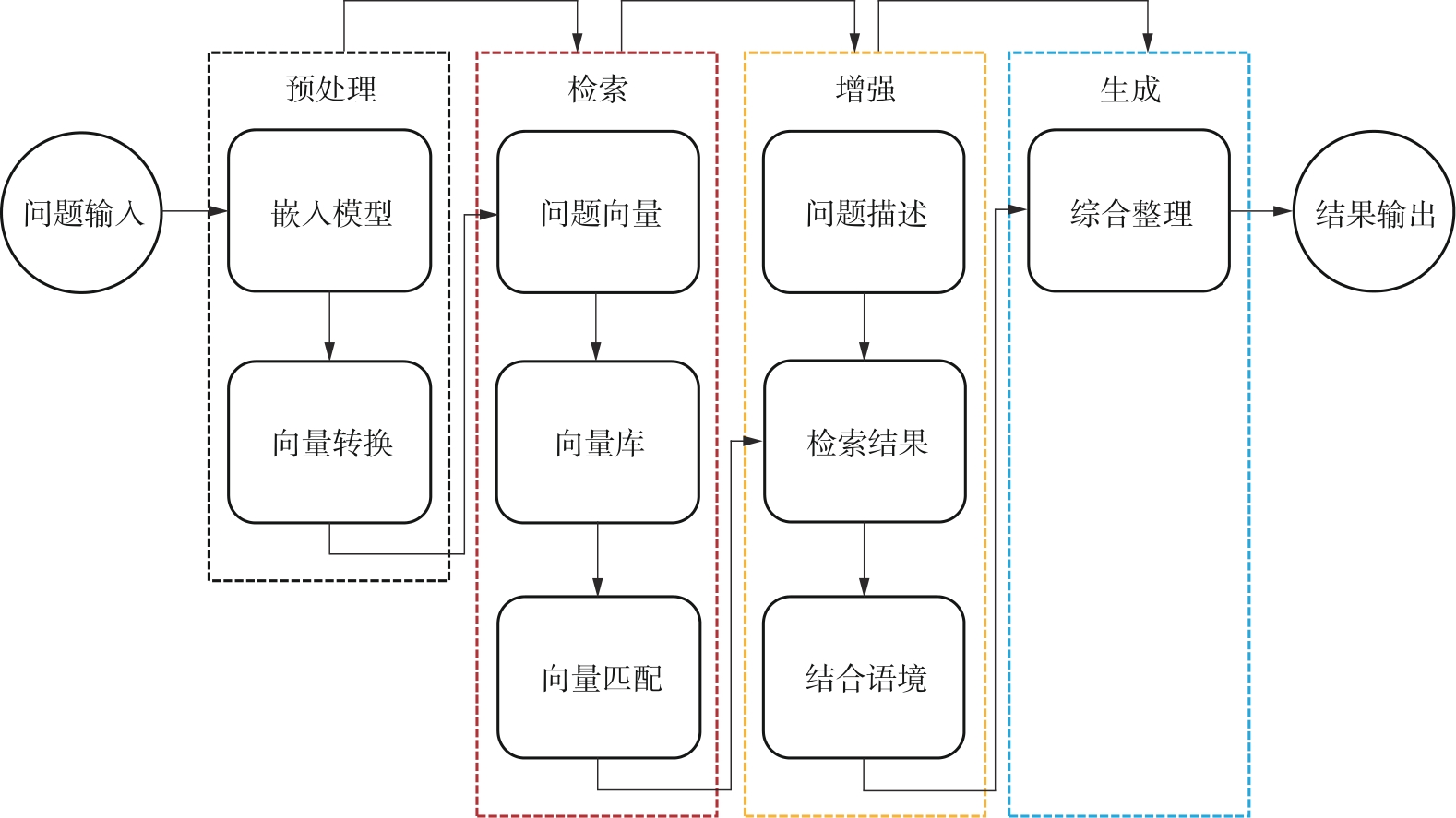

图11
微调流程示意图"
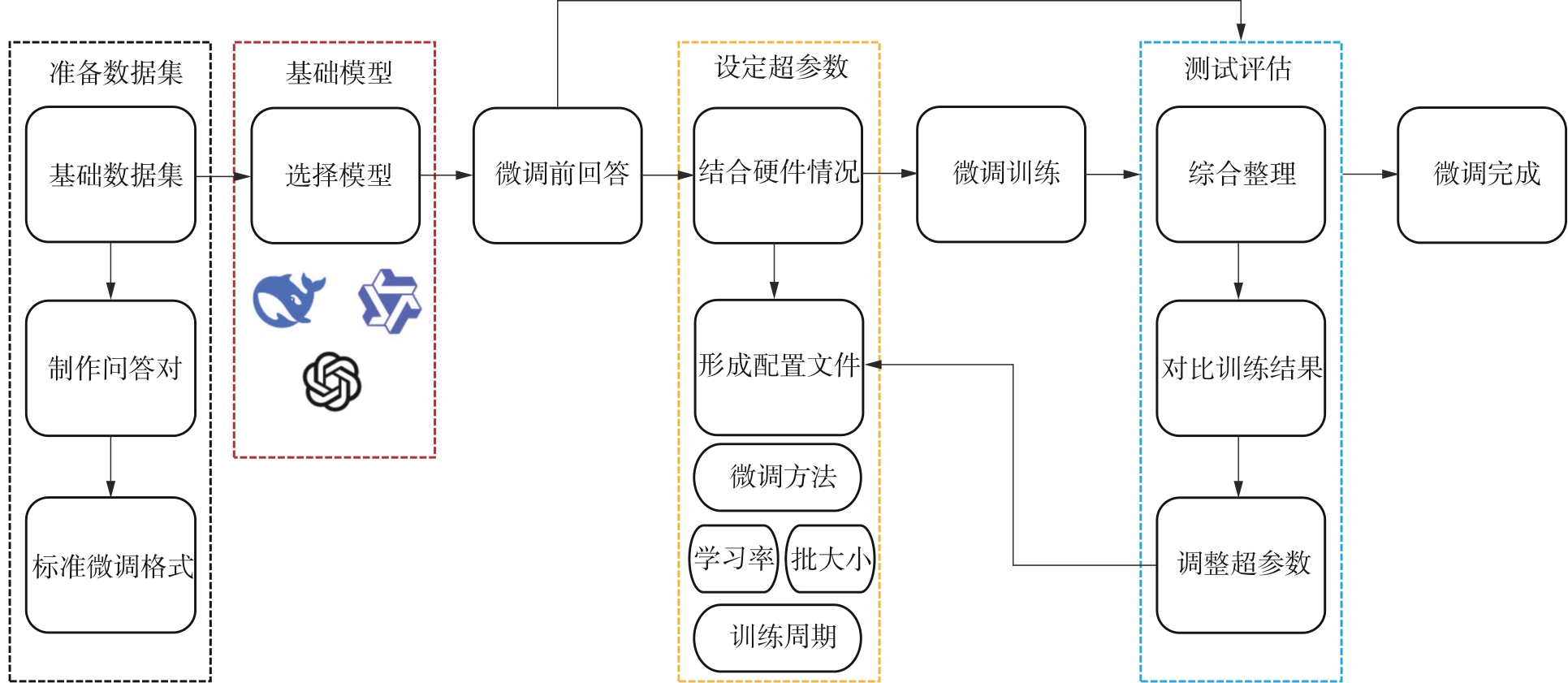
表6
典型LLM对齐方法的定量对比"
| 典型方法 | 对齐前 | 对齐后 |
|---|---|---|
| 利用Prompt多轮对话提高场景生成成功率[ | 累计成功率为37.5% | 累计成功率为50% |
| 利用RAG提升生成轨迹真实性[ | mADE达13.1;mFDE达14.1 | mADE达1.54;mFDE达1.21 |
| 利用微调提升模型对场景的理解[ | 场景描述得分为0.49 | 场景描述得分为0.71 |
表7
问题-原因-对策分析"
| 维度 | 典型问题 | 主要原因 | 可行对策 |
|---|---|---|---|
| 交互数据集 | 关键词与轨迹数据缺失;长尾交互场景稀缺;地域适应性不足 | 以功能验证为导向的数据采集策略;跨模态数据对齐困难;行人与非机动车分布失衡;制度与环境差异 | 构建多模态强语义数据集;发展自动化标注与轨迹提取技术;建立统一标签标准与数据共享机制;利用高保真合成技术补充长尾场景;实现已知与未知场景的自动识别 |
| 交互场景描述 | 交互度量缺乏可比性;标准与规范描述分散;评估指标单一 | 不同研究口径不一致;测试工具与标准脱节;多范式测试需求未形成闭环 | 建立统一的严重性基准与分级体系;面向规范语言实现快速场景生成与场景库构建;设计融合安全、效率与博弈的多维综合评价指标;通过仿真、场地与实车测试约束可测性 |
| 传统学习生成方法 | 真实性与多样性难以兼顾;关键场景生成效率低;虚实差距难以量化;生成过程可控性不足 | 数据偏差与模式坍塌问题;高维稀有事件搜索困难;多源差异叠加效应;缺乏可控与可微分接口 | 采用因子化分层组合生成方法;引入风险敏感搜索与课程学习机制;通过域随机化、系统辨识与因果对齐缩小虚实差距;发展可控生成与仿真技术;推动多范式方法融合 |
| 大语言模型方法 | 推理速度慢;计算成本高;知识更新滞后与生成幻觉问题;黑盒机制解释性差 | 上下文推理负担重;缺乏可靠外部知识接入机制;缺少程序化验证环节 | 应用量化、剪枝、稀疏化与参数高效微调技术;引入检索增强生成与知识图谱结合机制;推进程序化与可验证生成及工具调用能力;建设行业知识图谱与向量数据库;采用硬件加速与流水线并行策略 |
| [1] | 陈吉清,舒孝雄,兰凤崇,等 .典型危险事故特征的自动驾驶测试场景构建[J].华南理工大学学报(自然科学版),2021,49(5):1-8. |
| CHEN Jiqing, SHU Xiaoxiong, LAN Fengchong,et al .Construction of autonomous vehicles test scenarios with typical dangerous accident characteristics[J].Journal of South China University of Technology (Natural Science Edition),2021,49(5):1-8. | |
| [2] | 武彪,任洪泽,郑联庆,等 .基于自然驾驶行为的智能驾驶复杂场景构建方法[J].华南理工大学学报(自然科学版),2025,53(2):38-47. |
| WU Biao, REN Hongze, ZHENG Lianqing,et al .Com-plex scenario construction method for navigation pil ot based on natural driving behaviour[J].Journal of South China University of Technology (Natural Science Edition),2025,53(2):38-47. | |
| [3] | BROWN T, MANN B, RYDER N,et al .Language models are few-shot learners[J].Advances in Neural Information Processing Systems,2020,33:1877-1901. |
| [4] | WEI J, WANG X, SCHUURMANS D,et al .Chain-of-thought prompting elicits reasoning in large language models[J].Advances in Neural Information Processing Systems,2022,35:24824-24837. |
| [5] | LEWIS P, PEREZ E, PIKTUS A,et al .Retrieval-augmented generation for knowledge-intensive NLP tasks[J].Advances in Neural Information Processing Systems,2020,33:9459-9474. |
| [6] | HU E J, SHEN Y, WALLIS P,et al .Lora: low-rank adaptation of large language models[J].arXiv preprint arXiv: 2106.09685v2,2021. |
| [7] | PUNZO V, BORZACCHIELLO M T, CIUFFO B .On the assessment of vehicle trajectory data accuracy and application to the next generation simulation (NGSIM) program data[J].Transportation Research Part C:Emer-ging Technologies,2011,19(6):1243-1262. |
| [8] | GEIGER A, LENZ P, URTASUN R .Are we ready for autonomous driving?the kitti vision benchmark suite[C]∥Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition.Providence:IEEE,2012,3354-3361 |
| [9] | BINAS J, NEIL D, LIU S C,et al .DDD17:End-to-end DAVIS driving dataset[J].arXiv preprint arXiv:,2017. |
| [10] | KRAJEWSKI R, BOCK J, KLOEKER L,et al .The highd dataset:a drone dataset of naturalistic vehicle trajectories on german highways for validation of highly automated driving systems[C]∥Proceedings of the 21st International Conference on Intelligent Transportation Systems (ITSC).Maui:IEEE,2018:2118-2125. |
| [11] | RAMANISHKA V, CHEN Y T, MISU T,et al .Toward driving scene understanding: a dataset for learning driver behavior and causal reasoning[C]∥Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition.Salt Lake City:IEEE,2018:7699-7707. |
| [12] | YU F, CHEN H, WANG X,et al .Bdd100k:a diverse driving dataset for heterogeneous multitask learning[C]∥Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition.Seattle: IEEE, 2020: 2636-2645. |
| [13] | HUANG X, WANG P, CHENG X .The apolloscape open dataset for autonomous driving and its application[C]∥Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops (CVPRW).Salt Lake City:IEEE,2018:1067-1073. |
| [14] | HOUSTON J, ZUIDHOF G, BERGAMINI L, et al .One thousand and one hours: self-driving motion prediction dataset[C]∥Proceedings of the Conference on Robot Learning.Cambridge:PMLR,2021: 409-418. |
| [15] | CHANG M F, LAMBERT J, SANGKLOY P, et al .Argoverse: 3D tracking and forecasting with rich maps[C]∥Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition.Long Beach: IEEE,2019: 8748-8757. |
| [16] | ZHAN W, SUN L, WANG D,et al .Interaction dataset:an international, adversarial and cooperative motion dataset in interactive driving scenarios with semantic maps[J].arXiv preprint arXiv:,2019. |
| [17] | RASOULI A, KOTSERUBA I, KUNIC T, et al .Pie: a large-scale dataset and models for pedestrian intention estimation and trajectory prediction[C]∥Proceedings of the IEEE/CVF International Conference on Computer Vision (ICCV).Seoul:IEEE,2019 6262-6271. |
| [18] | PATIL A, MALLA S, GANG H, et al .The H3D dataset for full-surround 3D multi-object detection and tracking in crowded urban scenes[C]∥Proceedings of the IEEE/CVF International Conference on Robotics and Automation (ICRA).Montreal:IEEE,2019 9552-9557. |
| [19] | IZQUIERDO R, QUINTANAR A, PARRA I, et al .The prevention dataset: a novel benchmark for prediction of vehicles intentions[C]∥Proceedings of the IEEE Intelligent Transportation Systems Conference (ITSC).Auckland: IEEE, 2019: 3114-3121. |
| [20] | PHAM Q H, SEVESTRE P, PAHWA R S, et al .A* 3D dataset: towards autonomous driving in challenging environments[C]∥Proceedings of the IEEE International Conference on Robotics and Automation (ICRA).Paris: IEEE, 2020: 2267-2273. |
| [21] | YANG G, SONG X, HUANG C,et al .Drivingstereo:a large-scale dataset for stereo matching in autonomous driving scenarios[C]∥Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition.Long Beach:IEEE,2019:899-908. |
| [22] | MALLA S, DARIUSH B, CHOI C .Titan: future forecast using action priors[C]∥Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition.Seattle: IEEE, 2020: 11186-11196. |
| [23] | BOCK J, KRAJEWSKI R, MOERS T, et al .The ind dataset: a drone dataset of naturalistic road user trajectories at german intersections[C]∥Proceedings of the IEEE Intelligent Vehicles Symposium (Ⅳ).Las Vegas: IEEE, 2020: 1929-1934. |
| [24] | KRAJEWSKI R, MOERS T, BOCK J, et al .The round dataset: a drone dataset of road user trajectories at roundabouts in germany[C]∥Proceedings of the IEEE 23rd International Conference on Intelligent Transportation Systems (ITSC).Rhodes:IEEE,2020:1-6. |
| [25] | AGARWAL S, VORA A, PANDEY G, et al .Ford multi-AV seasonal dataset[J].The International Journal of Robotics Research,2020,39(12):1367-1376. |
| [26] | BAO W, YU Q, KONG Y .Uncertainty-based traffic accident anticipation with spatio-temporal relational learning[C]∥Proceedings of the 28th ACM International Conference on Multimedia.Seattle:ACM,2020:2682-2690. |
| [27] | CAESAR H, BANKITI V, LANG A H, et al .Nuscenes: a multimodal dataset for autonomous driving[C]∥Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition.Seattle:IEEE, 2020: 11621-11631. |
| [28] | KOTSERUBA I, RASOULI A, TSOTSOS J K .Joint attention in autonomous driving (JAAD)[J].arXiv preprint arXiv:, 2016. |
| [29] | YAO Y, WANG X, XU M, et al .When,where,and what? a new dataset for anomaly detection in driving videos[J].arXiv preprint arXiv:,2020. |
| [30] | LI S, QIAN Y, ZENG J, et al .Analysis of the impact of large vehicles in merging areas based on driver characteristics under vehicle-road coordination[J].Physica A: Statistical Mechanics and its Applications, 2025, 665: 130497/1-18. |
| [31] | MOERS T, VATER L, KRAJEWSKI R, et al .The exiD dataset: a real-world trajectory dataset of highly interactive highway scenarios in Germany[C]∥Proceedings of the 2022 IEEE Intelligent Vehicles Symposium (Ⅳ).Aachen: IEEE, 2022: 958-964. |
| [32] | LEVELXDATA .The unid dataset [EB/OL].(2021-05-06) [2025-06-01].. |
| [33] | YOGAMANI S, HUGHES C, HORGAN J, et al .Woodscape: a multi-task, multi-camera fisheye dataset for autonomous driving[C]∥Proceedings of the IEEE/CVF International Conference on Computer Vision.Seoul:IEEE,2019:9308-9318. |
| [34] | WILSON B, QI W, AGARWAL T,et al .Argoverse 2:next generation datasets for self-driving perception and forecasting[J].arXiv preprint arXiv:,2023. |
| [35] | SUN P, KRETZSCHMAR H, DOTIWALLA X,et al .Scalability in perception for autonomous driving:Waymo open dataset[C]∥Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition.Seattle:IEEE,2020:2446-2454. |
| [36] | CAESAR H, KABZAN J, TAN K S,et al .nuPlan:a closed-loop ML-based planning benchmark for autonomous vehicles[J].arXiv preprint arXiv:,2021. |
| [37] | SINGH G, AKRIGG S, DI MAIO M,et al .Road:the road event awareness dataset for autonomous driving[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,2022,45(1):1036-1054. |
| [38] | MAO J, NIU M, JIANG C,et al .One million scenes for autonomous driving:ONCE dataset[J].arXiv preprint arXiv:,2021. |
| [39] | ZHENG O, ABDEL-ATY M, YUE L,et al .CitySim:a drone-based vehicle trajectory dataset for safety-oriented research and digital twins[J].Transportation Research Record,2024,2678(4):606-621. |
| [40] | ZHANG Q, PENG Z, ZHOU B .Learning to drive by watching youtube videos:action-conditioned contrastive policy pretraining[C]∥Proceedings of the European Conference on Computer Vision.Tel Aviv:Springer Nature Switzerland,2022:111-128. |
| [41] | MALLA S, CHOI C, DWIVEDI I,et al .Drama:joint risk localization and captioning in driving[C]∥Proceedings of the IEEE/CVF Winter Conference on Applications of Computer Vision.Waikoloa:IEEE,2023:1043-1052. |
| [42] | YU H, LUO Y, SHU M, et al .Dair-v2x: a large-scale dataset for vehicle-infrastructure cooperative 3D object detection[C]∥Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition.New Orleans: IEEE, 2022: 21361-21370. |
| [43] | CREβ C, ZIMMER W, STRAND L, et al .A9-dataset: multi-sensor infrastructure-based dataset for mobility research[C]∥Proceedings of the IEEE Intelligent Vehicles Symposium (Ⅳ).Aachen: IEEE,2022: 965-970. |
| [44] | GRESSENBUCH L, ESTERLE K, KESSLER T, et al .Mona: the munich motion dataset of natural driving[C]∥Proceedings of the IEEE 25th International Conference on Intelligent Transportation Systems (ITSC).Macau: IEEE, 2022: 2093-2100. |
| [45] | XU Y, SHAO W, LI J, et al .SIND: a drone dataset at signalized intersection in china[C]∥Procee-dings of the IEEE 25th International Conference on Intelligent Transportation Systems (ITSC).Macau:IEEE,2022: 2471-2478. |
| [46] | GENG M, LI J, XIA Y, et al .A physics-informed transformer model for vehicle trajectory prediction on highways[J].Transportation Research Part C:Emer-ging Technologies, 2023, 154: 104272/1-28. |
| [47] | AGARWAL N, CHEN Y T .Ordered atomic activity for fine-grained interactive traffic scenario understanding[C]∥Proceedings of the IEEE/CVF International Conference on Computer Vision.Paris: IEEE, 2023:8590-8602. |
| [48] | ZIMMER W, CREβ C, NGUYEN H T, et al .TUMTraf intersection dataset: all you need for urban 3D camera-lidar roadside perception[C]∥Proceedings of the IEEE 26th International Conference on Intelligent Transportation Systems (ITSC).Bilbao:IEEE,2023:1030-1037. |
| [49] | WANG J, FU T, SHANGGUAN Q .Wide-area vehicle trajectory data based on advanced tracking and trajectory splicing technologies: potentials in transportation research[J].Accident Analysis & Prevention,2023, 186: 107044/1-7. |
| [50] | CREβ C, ZIMMER W, PURSCHKE N, et al .TUMTraf event: calibration and fusion resulting in a dataset for roadside event-based and RGB cameras[J].IEEE Transactions on Intelligent Vehicles,2024,9(7): 5186-5203. |
| [51] | ZIMMER W, WARDANA G A, SRITHARAN S,et al .TUMTraf v2x cooperative perception dataset[C]∥Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition.Seattle:IEEE,2024: 22668-22677. |
| [52] | JIANG X, ZHAO X, LIU Y, et al .InterHub: a naturalistic trajectory dataset with dense interaction for autonomous driving[J].arXiv preprint arXiv: 2411.18302, 2024. |
| [53] | WANG Y, CHENG K, HE J, et al .DrivingDojo dataset:advancing interactive and knowledge-enriched driving world model[J].Advances in Neural Information Processing Systems, 2024, 37: 13020-13034. |
| [54] | ZHU J, WANG W, ZHAO D .A tempt to unify he-terogeneous driving databases using traffic primitives[C]∥Proceedings of the IEEE 21st International Conference on Intelligent Transportation Systems (ITSC).Maui: IEEE, 2018: 2052-2057. |
| [55] | ZHOU H, MA K, LIANG S, et al .ULTra-AV: a unified longitudinal trajectory dataset for automated vehicle[J].arXiv preprint arXiv:, 2024. |
| [56] | ZHOU X, LIN Z, SHAN X, et al .DrivingGaussian:composite gaussian splatting for surrounding dynamic autonomous driving scenes[C]∥Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition.Seattle:IEEE,2024:21634-21643. |
| [57] | 2022 Road vehicles—test scenarios for automated dri-ving systems—scenario-based safety evaluation framework: [S]. |
| [58] | 2024 Road vehicles—test scenarios for automated dri-ving systems—scenario categorization: [S]. |
| [59] | United Nations Economic Commission For Europe .New assessment/test method for automated driving (NATM) guidelines for validating automated driving system (ADS)-amendments to ECE/TRANS/WP.29/2022/58 [R].Geneva: UNECE, 2022. |
| [60] | Standard for functional requirements of data for autonomous driving system testing:IEEE P3344 [S]. |
| [61] | Japan Automobile Manufacturers Association,Inc .Automated driving safety evaluation framework Ver 3.0 [R].Tokyo: Japan Automobile Manufacturers Association, Inc., 2022. |
| [62] | 交通参与者行为理解与轨迹预测的评测方法及数据集构建标准:T/CAABZ2022002 [S]. |
| [63] | 智能网联汽车 自动驾驶功能场地试验方法及要求: [S]. |
| [64] | BERGER C, RUMPE B .Engineering autonomous driving software[M]∥Proceedings of the Experience from the DARPA Urban Challenge.London:Springer,2012: 243-271. |
| [65] | ALTHOFF M, KOSCHI M, MANZINGER S .CommonRoad: composable benchmarks for motion planning on roads[C]∥Proceedings of the 2017 IEEE Intelligent Vehicles Symposium (Ⅳ).Los Angeles:IEEE,2017:719-726. |
| [66] | BOCK F, SIPPL C, HEINZ A, et al .Advantageous usage of textual domain-specific languages for scenario-driven development of automated driving functions[C]∥Proceedings of the IEEE International Systems Conference (SysCon).Orlando:IEEE,2019:1-8. |
| [67] | QUEIROZ R, BERGER T, CZARNECKI K .GeoScenario:an open DSL for autonomous driving scenario representation[C]∥Proceedings of the IEEE Intelligent Vehicles Symposium (Ⅳ).Paris:IEEE,2019:287-294. |
| [68] | Foretellix,Inc .Measurable scenario description language[EB/OL].(2021-05-06) [2025-06-01].. |
| [69] | FREMONT D J, KIM E, DREOSSI T,et al .Scenic:a language for scenario specification and data generation[J].Machine Learning,2023,112(10):3805-3849. |
| [70] | ZHANG X, KHASTGIR S, JENNINGS P .Scenario description language for automated driving systems: a two level abstraction approach[C]∥Proceedings of the 2020 IEEE International Conference on Systems,Man,and Cybernetics (SMC).Toronto:IEEE,2020:973-980. |
| [71] | SCHÜTT B, BRAUN T, OTTEN S, et al .SceML: a graphical modeling framework for scenario-based testing of autonomous vehicles[C]∥Proceedings of the 23rd ACM/IEEE International Conference on Model Driven Engineering Languages and Systems.Montreal: ACM, 2020: 114-120. |
| [72] | ASAM.Openscenario[EB/OL].(2021-05-09)[2025-06-01].. |
| [73] | ZHOU Y, SUN Y, TANG Y,et al .Avunit[EB/OL].(2021-05-13)[2025-06-01].. |
| [74] | CHEN B, LI T F .Formal modeling and verification of autonomous driving scenario[C]∥Proceedings of the 2021 IEEE International Conference on Information Communication and Software Engineering (ICICSE).Chongqing: IEEE, 2021: 313-321. |
| [75] | HARDER A, RANJIT J, BEHL M .Scenario2Vector: scenario description language based embeddings for traffic situations[C]∥Proceedings of the ACM/IEEE 12th International Conference on Cyber-Physical Systems.Nashville: ACM, 2021: 167-176. |
| [76] | LI B, DU D, CHEN S, et al .SML4ADS: an open DSML for autonomous driving scenario representation and generation[C]∥Proceedings of the 37th IEEE/ACM International Conference on Automated Software Engineering.Rochester: IEEE, 2022: 1-3. |
| [77] | KANG S, GUO H, SU P, et al .Ecsas: exploring critical scenarios from action sequence in autonomous driving[C]∥Proceedings of the IEEE 32nd Asian Test Symposium (ATS).Beijing: IEEE, 2023: 1-6. |
| [78] | LI Q, PENG Z M, FENG L, et al .Scenarionet: open-source platform for large-scale traffic scenario simulation and modeling[J].Advances in Neural Information Processing Systems,2023,36:3894-3920. |
| [79] | AOKI T, TOMITA T, KAWAI T, et al .Modeling language for scenario development of autonomous driving systems[J].arXiv preprint arXiv:,2025. |
| [80] | 凡海金,王润民,张心睿,等 .无信号交叉口网联车辆协同碰撞预警研究进展[J].汽车技术,2024(3):1-16. |
| FAN Haijin, WANG Runmin, ZHANG Xinrui,et al .Research progress of cooperative collision warning of connected vehicles at unsignalized intersections[J].Au tomobile Technology,2024(3),1-16. | |
| [81] | DING W, XU C, ARIEF M, et al .A survey on safety-critical driving scenario generation—a metho-dological perspective[J].IEEE Transactions on Intelligent Transportation Systems, 2023, 24(7): 6971-6988. |
| [82] | KAR A, PRAKASH A, LIU M Y,et al .Meta-Sim:learning to generate synthetic datasets[C]∥Procee-dings of the IEEE/CVF International Conference on Computer Vision.Seoul:IEEE,2019:4551-4560. |
| [83] | TAN S, WONG K, WANG S, et al .SceneGen:learning to generate realistic traffic scenes[C]∥Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition.Nashville:IEEE,2021: 892-901. |
| [84] | SUO S, REGALADO S, CASAS S,et al .TrafficSim:learning to simulate realistic multi-agent behaviors[C]∥Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition.Nashville:IEEE,2021:10395-10404. |
| [85] | CHEN J, YUAN B, TOMIZUKA M .Deep imitation learning for autonomous driving in generic urban scenarios with enhanced safety[C]∥Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS).Macau:IEEE,2019:2884-2890. |
| [86] | DEVARANJAN J, KAR A, FIDLER S .Meta-Sim2:unsupervised learning of scene structure for synthetic data generation[C]∥Proceedings of the European Conference on Computer Vision.Glasgow:Springer International Publishing, 2020: 715-733. |
| [87] | ZHONG Z, REMPE D, XU D, et al .Guided conditional diffusion for controllable traffic simulation[C]∥Proceedings of the IEEE International Conference on Robotics and Automation (ICRA).London:IEEE,2023: 3560-3566. |
| [88] | SUN S, GU Z, SUN T, et al .DriveSceneGen:generating diverse and realistic driving scenarios from scratch[J].IEEE Robotics and Automation Letters,2024, 9(5): 4552-4559. |
| [89] | YANG C, HE Y, TIAN A X, et al .WcDT:world-centric diffusion transformer for traffic scene generation[J].arXiv preprint arXiv:, 2024. |
| [90] | DING W, XU M, ZHAO D .Cmts: a conditional multiple trajectory synthesizer for generating safety-critical driving scenarios[C]∥Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA).Paris:IEEE, 2020: 4314-4321. |
| [91] | KUUTTI S, FALLAH S, BOWDEN R .Training adversarial agents to exploit weaknesses in deep control policies[C]∥Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA).Paris: IEEE, 2020: 108-114. |
| [92] | FENG S, YAN X, SUN H, et al .Intelligent dri-ving intelligence test for autonomous vehicles with naturalistic and adversarial environment[J].Nature Communications, 2021, 12(1): 748/1-14. |
| [93] | SUN H, FENG S, YAN X, et al .Corner case generation and analysis for safety assessment of autonomous vehicles[J].Transportation Research Record,2021,2675(11): 587-600. |
| [94] | MA Y, JIANG W, ZHANG L, et al .Evolving testing scenario generation method and intelligence evaluation framework for automated vehicles[J].arXiv preprint arXiv:,2023. |
| [95] | WACHI A .Failure-scenario maker for rule-based agent using multi-agent adversarial reinforcement learning and its application to autonomous driving[J].arXiv preprint arXiv:,2019. |
| [96] | CHEN B, CHEN X, WU Q, et al .Adversarial evaluation of autonomous vehicles in lane-change scenarios[J].IEEE Transactions on Intelligent Transportation Systems, 2021, 23(8): 10333-10342. |
| [97] | HAO K, CUI W, LUO Y, et al .Adversarial safety-critical scenario generation using naturalistic human driving priors[J].IEEE Transactions on Intelligent Vehicles, 2023, 9(1): 2788-2800. |
| [98] | DING W, CHEN B, XU M, et al .Learning to collide: an adaptive safety-critical scenarios generating method[C]∥Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS).Las Vegas: IEEE, 2020: 2243-2250. |
| [99] | XU C, PETIUSHKO A, ZHAO D, et al .Diffscene: diffusion-based safety-critical scenario generation for autonomous vehicles[C]∥Proceedings of the Thirty-Ninth AAAI Conference on Artificial Intelligence.Philadelphia:AAAI Press,2025:8797-8805. |
| [100] | LU J, AZAM S, ALCAN G, et al .Data-driven diffusion models for enhancing safety in autonomous vehicle traffic simulations[J].arXiv preprint arXiv:, 2024. |
| [101] | SHIROSHITA S, MARUYAMA S, NISHIYAMA D,et al .Behaviorally diverse traffic simulation via reinforcement learning[C]∥Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS).Las Vegas:IEEE,2020:2103-2110. |
| [102] | RANA A, MALHI A .Building safer autonomous agents by leveraging risky driving behavior knowledge[C]∥Proceedings of the International Conference on Communications, Computing, Cybersecurity, and Informatics (CCCI).Beijing: IEEE, 2021: 1-6. |
| [103] | HAO K, LIU L, CUI W, et al .Bridge Gen:Bridging data-driven and knowledge-driven approaches for safety-critical scenario generation in automated vehicle validation[J].arXiv preprint arXiv:,2023. |
| [104] | HUANG Z, ZHANG Z, VAIDYA A, et al .Versatile behavior diffusion for generalized traffic agent simulation[J].arXiv preprint arXiv:,2024. |
| [105] | DING W, LIN H, LI B, et al .Generalizing goal-conditioned reinforcement learning with variational causal reasoning[J].Advances in Neural Information Processing Systems, 2022, 35: 26532-26548. |
| [106] | DING W, LIN H, LI B, et al .CausalAF:causal autoregressive flow for safety-critical driving scenario generation[C]∥Proceedings of the Conference on Robot Learning.Atlanta: PMLR, 2023: 812-823. |
| [107] | DING W, LIN H, LI B, et al .Semantically adversarial scene generation with explicit knowledge guidance[J].IEEE Transactions on Intelligent Transportation Systems, 2025, 26(2): 1510-1521. |
| [108] | TAN S, IVANOVIC B, WENG X, et al .Language conditioned traffic generation[J].arXiv preprint arXiv:, 2023. |
| [109] | LI S, AZFAR T, KE R .ChatSUMO:Large language model for automating traffic scenario generation in simulation of urban mobility[J].IEEE Transactions on Intelligent Vehicles,2024,9(1):2801-2810. |
| [110] | AIERSILAN A .Generating traffics scenarios via in-context learning to learn better motion planner[C]∥Proceedings of the Thirty-Ninth AAAI Conference on Artificial Intelligence.Philadelphia:AAAI Press,2025:14539-14547. |
| [111] | MICELI-BARONE A V, LASCARIDES A, INNES C. Dialogue-based generation of self-driving simulation scenarios using large language models[J].arXiv preprint arXiv:, 2023. |
| [112] | CHANG C, WANG S, ZHANG J, et al .LLMScenario: large language model driven scenario generation[J].IEEE Transactions on Systems,Man,and Cybernetics:Systems,2024,54(11):6581-6594. |
| [113] | XU W, PEI H, YANG J, et al .Exploring critical testing scenarios for decision-making policies:an LLM approach[J].arXiv preprint arXiv:,2024. |
| [114] | DING W, CAO Y, ZHAO D,et al .RealGen:retrieval augmented generation for controllable traffic scenarios[C]∥Proceedings of the European Confe-rence on Computer Vision. Milan:Springer Nature Switzerland, 2024: 93-110. |
| [115] | NGUYEN P, WANG T H, HONG Z W, et al .Text-to-drive: diverse driving behavior synthesis via large language models[C]∥Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS).Abu Dhabi: IEEE,2024:10495-10502. |
| [116] | LU Q, WANG X, JIANG Y,et al .Multimodal large language model driven scenario testing for autonomous vehicles[J].arXiv preprint arXiv:,2024. |
| [117] | ZHONG Z, REMPE D, CHEN Y, et al .Language-guided traffic simulation via scene-level diffusion[C]∥Proceedings of the Conference on Robot Learning.Atlanta: PMLR, 2023: 144-177. |
| [118] | LIU Z, LI L, WANG Y, et al .Controllable traffic simulation through LLM-guided hierarchical reasoning and refinement[C]∥Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems(IROS).Hangzhou:IEEE,2025:6288-6295. |
| [119] | ZHANG S, TIAN J, ZHU Z, et al .DriveGen:towards infinite diverse traffic scenarios with large models[J].arXiv preprint arXiv:, 2025. |
| [120] | HUANG H, CHEN Y, WANG Z, et al .Chat-Scene: bridging 3D scene and large language models with object identifiers[C]∥Proceedings of the Thirty-eighth Annual Conference on Neural Information Processing Systems. Vancouver: NeurIPS Foundation, 2024:113991-114017. |
| [121] | LU Q, MA M, DAI X, et al .Realistic corner case generation for autonomous vehicles with multimodal large language model[J].arXiv preprint arXiv:, 2024. |
| [122] | TIAN X, GU J, LI B,et al .DrivevLM:the convergence of autonomous driving and large vision-language models[J].arXiv preprint arXiv:,2024. |
| [123] | LI M, DING W, LIN H, et al .CrashAgent:crash scenario generation via multi-modal reasoning[J].arXiv preprint arXiv:, 2025. |
| [124] | MEI Y, NIE T, SUN J, et al .LLM-attacker: enhancing closed-loop adversarial scenario generation for autonomous driving with large language models[J].arXiv preprint arXiv:, 2025. |
| [125] | TANG S, ZHANG Z, ZHOU J, et al .Legend: a top-down approach to scenario generation of autonomous driving systems assisted by large language models[C]∥Proceedings of the 39th IEEE/ACM International Conference on Automated Software Engineering.Sacramento: ACM, 2024: 1497-1508. |
| [126] | TIAN H, REDDY K, FENG Y, et al .Enhancing autonomous vehicle training with language model integration and critical scenario generation[J].arXiv preprint arXiv:, 2024. |
| [127] | CUI Y, LIN H, YANG S, et al .Chain-of-thought for autonomous driving: a comprehensive survey and future prospects[J].arXiv preprint arXiv:, 2025. |
| [128] | ZHAO Y, ZHOU J, BI D, et al .A survey on the application of large language models in scenario-based testing of automated driving systems[J].arXiv preprint arXiv:, 2025. |
| [129] | CAI X, BAI X, CUI Z, et al .Text2Scenario:text-driven scenario generation for autonomous driving test[J].arXiv preprint arXiv:, 2025. |
| [1] | 董敏, 赖酉城, 毕盛. 基于多模态场景记忆与指令提示的目标导航方法[J]. 华南理工大学学报(自然科学版), 2026, 54(2): 1-15. |
| [2] | 涂新辉, 郭聪, 宗宇航. 基于双向文本扩展的信息检索重排方法[J]. 华南理工大学学报(自然科学版), 2025, 53(9): 59-67. |
| [3] | 钟绍鹏, 刘骜, 翟君诺, 范美含, 李茜瑶, 林原, 李振华. 共享自动驾驶汽车的多阶城市影响综述[J]. 华南理工大学学报(自然科学版), 2025, 53(6): 104-118. |
| [4] | 马晓亮, 高洁, 刘英, 裴庆祺, 赵汝强, 杨邦兴, 邓从健. 基于意图理解驱动的客服知识推荐大模型构建[J]. 华南理工大学学报(自然科学版), 2025, 53(3): 40-49. |
| [5] | 马莹莹, 李腾, 梁韵逸, 唐蒙. 基于分层柔性演员-评论家强化学习的交叉口信号配时-车辆轨迹联合优化方法[J]. 华南理工大学学报(自然科学版), 2025, 53(12): 1-16. |
| [6] | 朱宇, 徐志刚, 赵祥模, 等. 基于TsGAN的自动驾驶汽车高速公路变道切入测试场景自动生成算法[J]. 华南理工大学学报(自然科学版), 2024, 52(8): 76-88. |
| [7] | 曹宁博, 赵利英. 基于最大压强控制的交叉口自动驾驶汽车和行人管理方法[J]. 华南理工大学学报(自然科学版), 2024, 52(2): 124-135. |
| [8] | 符锌砂, 彭锦辉, 曾彦杰, 等. 面向自动驾驶汽车的交通标线使用状况评估方法[J]. 华南理工大学学报(自然科学版), 2022, 50(11): 1-13. |
| [9] | 陈吉清, 舒孝雄, 兰凤崇, 等. 典型危险事故特征的自动驾驶测试场景构建[J]. 华南理工大学学报(自然科学版), 2021, 49(5): 1-8. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||

