Journal of South China University of Technology(Natural Science Edition) ›› 2024, Vol. 52 ›› Issue (12): 52-64.doi: 10.12141/j.issn.1000-565X.230668
Special Issue: 2024年机械工程
• Mechanical Engineering • Previous Articles Next Articles
Excavation Trajectory Planning with Optimal Energy Consumption for Mining Electric Shovel
WANG Wei1,2 ZHANG Yuan1,2 SHI Shaoyu1,2 SHEN Gang3 YANG Wenqing1,2
- 1.School of Mechanical and Electrical Engineering,China University of Ming and Technology,Xuzhou 221110,Jiangsu,China
2.Jiangsu Key Laboratory of Mine Mechanical and Electrical Equipment,China University of Mining and Technology,Xuzhou 221116,Jiangsu,China
3.School of Mechanical Engineering,Anhui University of Science and Technology,Huainan 232063,Anhui,China
-
Received:2023-10-27Online:2024-12-25Published:2024-02-09 -
Contact:SHI Shaoyu E-mail:cumtwangwei@cumt.edu.cn;ssysdqx@163.com -
Supported by:the National Natural Science Foundation of China(U21A20125)
CLC Number:
Cite this article
WANG Wei, ZHANG Yuan, SHI Shaoyu, et al. Excavation Trajectory Planning with Optimal Energy Consumption for Mining Electric Shovel[J]. Journal of South China University of Technology(Natural Science Edition), 2024, 52(12): 52-64.
share this article

Fig.1
Structural diagram of mining electric shovel working device"
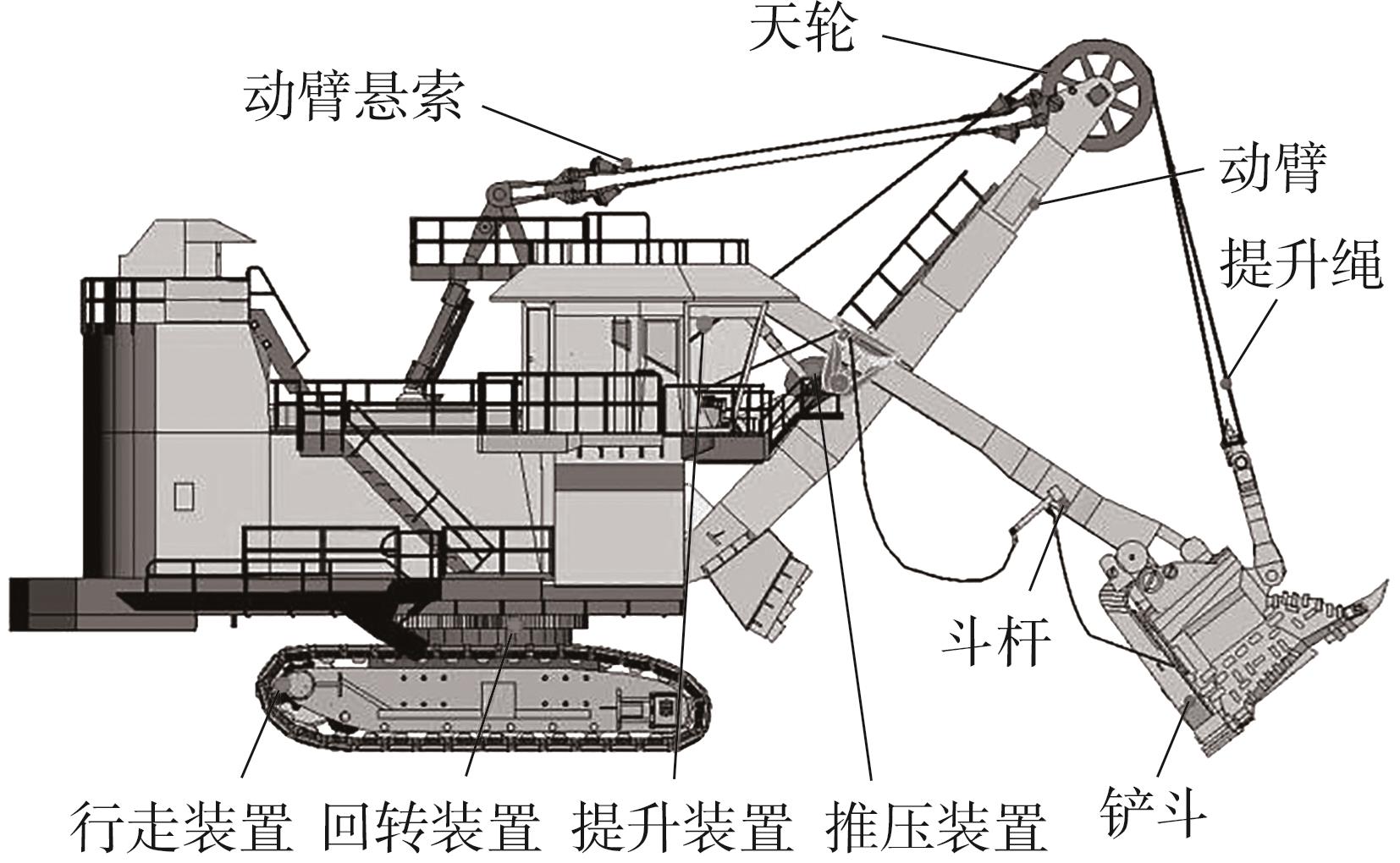
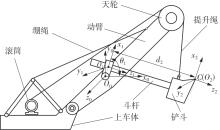
Fig.2
D-H joint coordinate system of mining electric shovel"
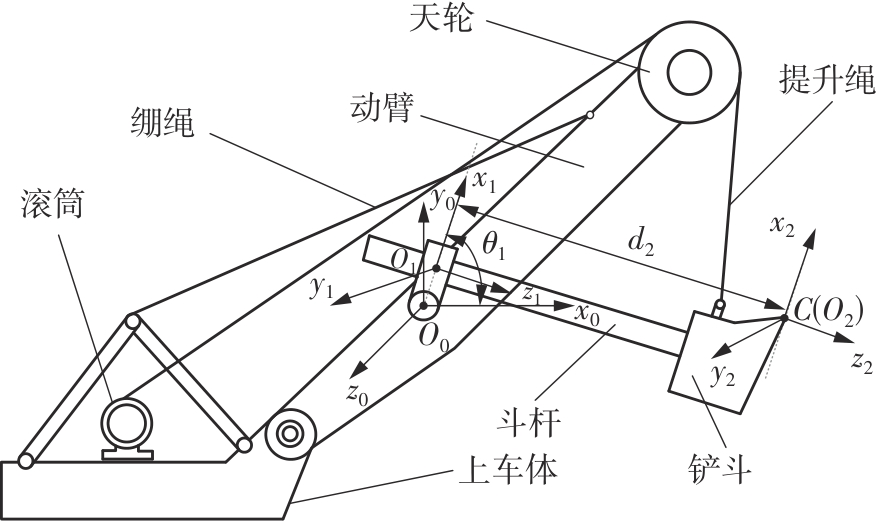
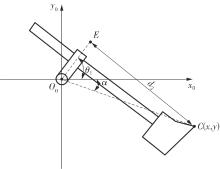
Fig.3
Geometric analysis of space position and attitude of mining electric shovel"
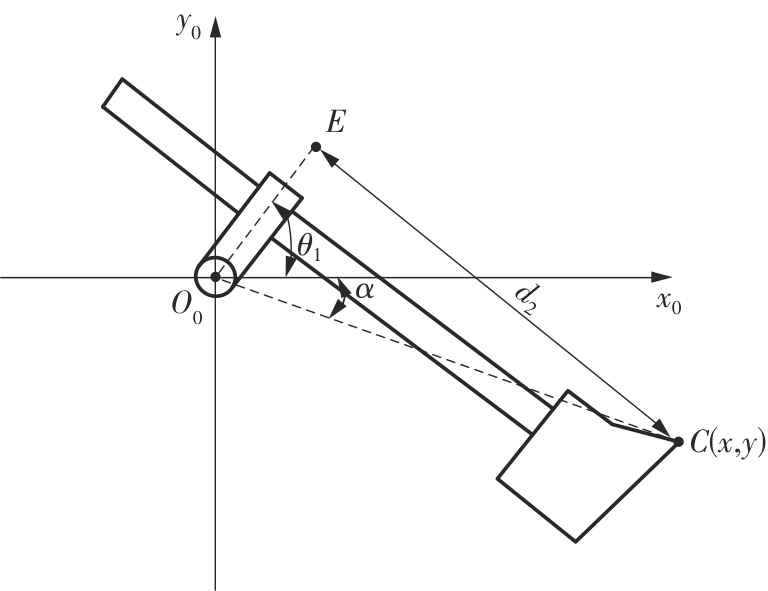
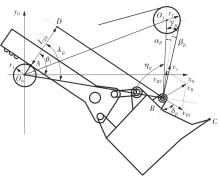
Fig.4
Speed analysis of lifting point of steel wire rope"
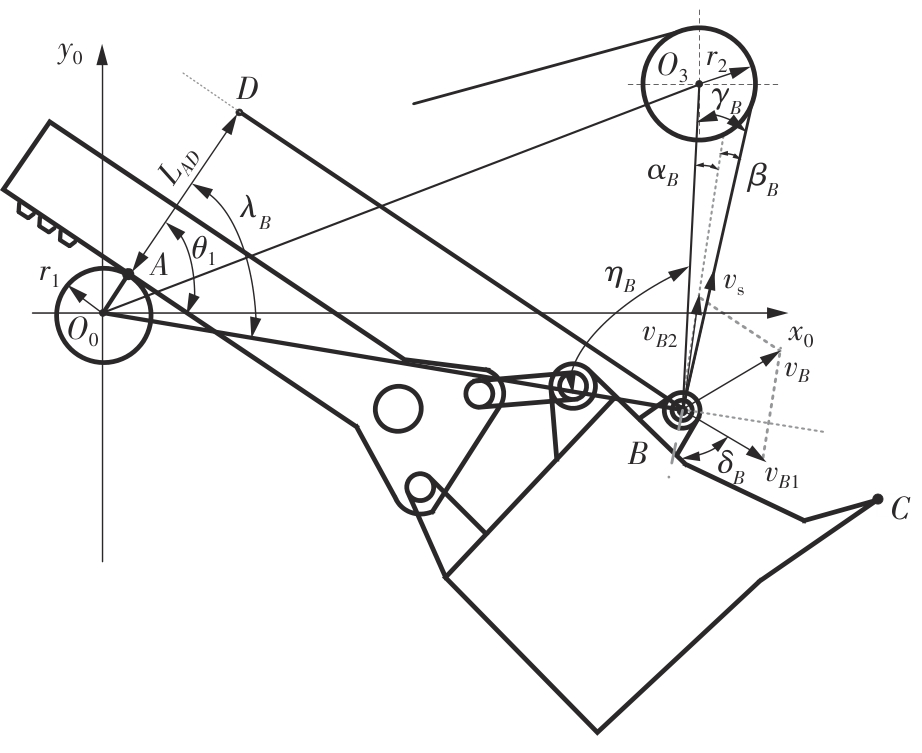
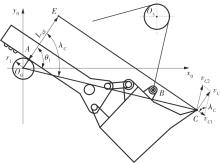
Fig.5
Speed analysis of bucket tip"
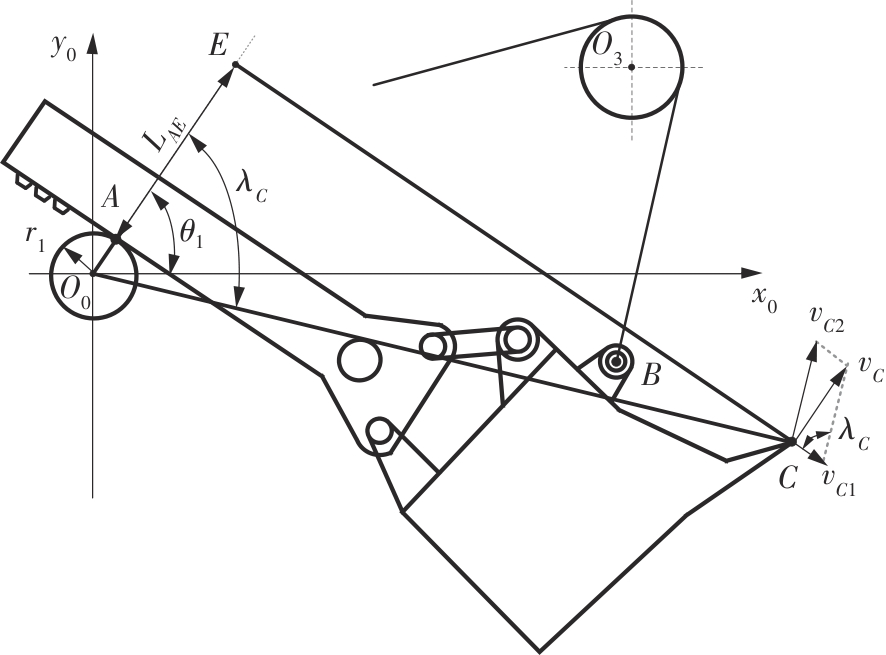
Fig.6
Analysis of dynamic excavation resistance"
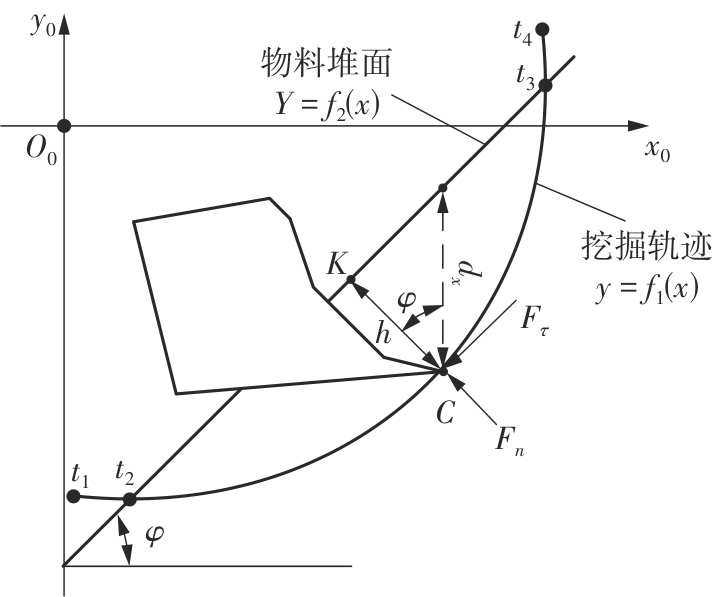
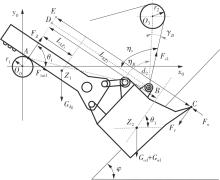
Fig.7
Static analysis of stick-bucket component"
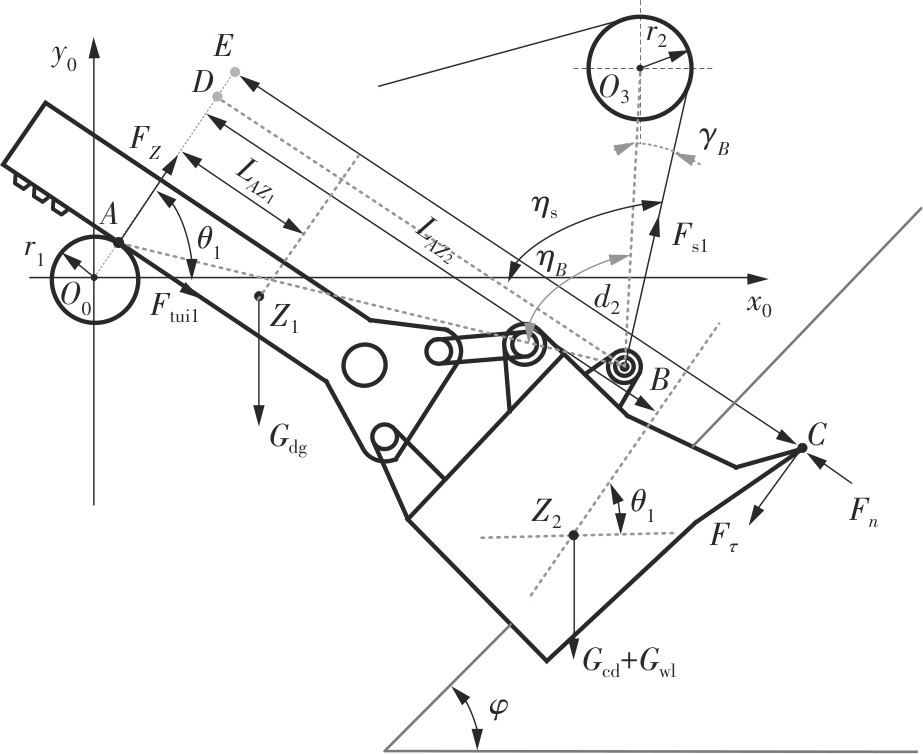
Fig.8
Dynamic analysis of stick-bucket components"
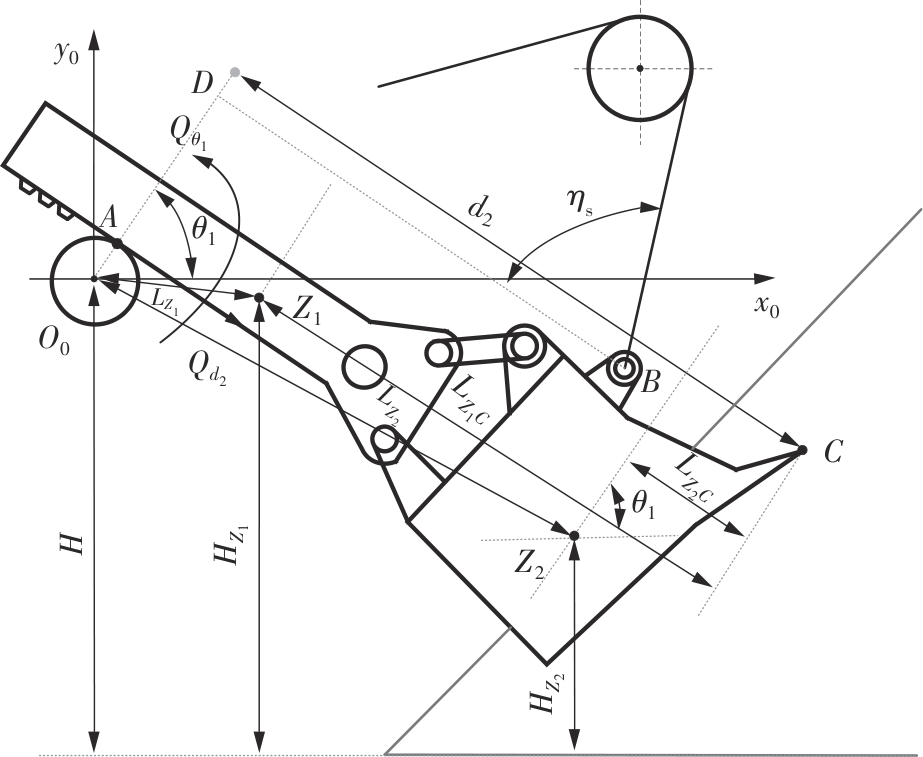
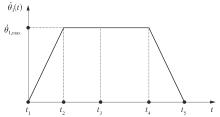
Fig.9
Change in dipper stick tilt speed"
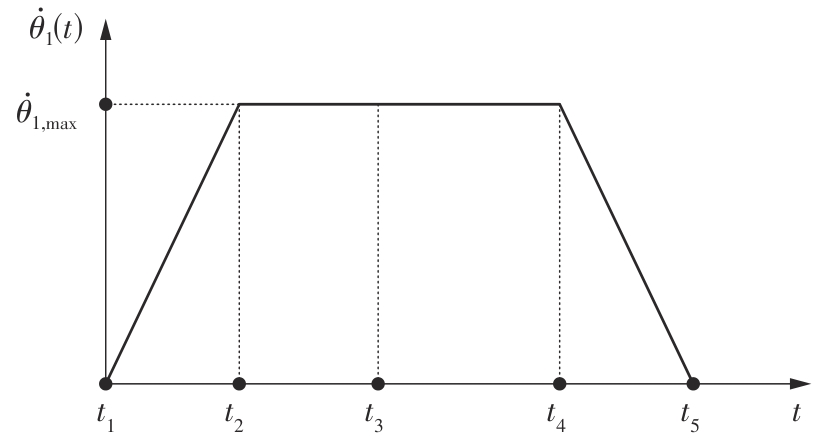
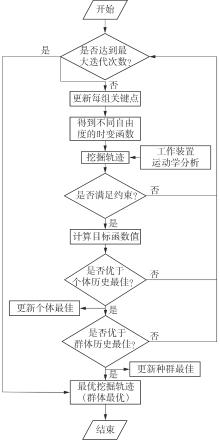
Fig.10
Trajectory optimization steps based on particle swarm optimization algorithm"
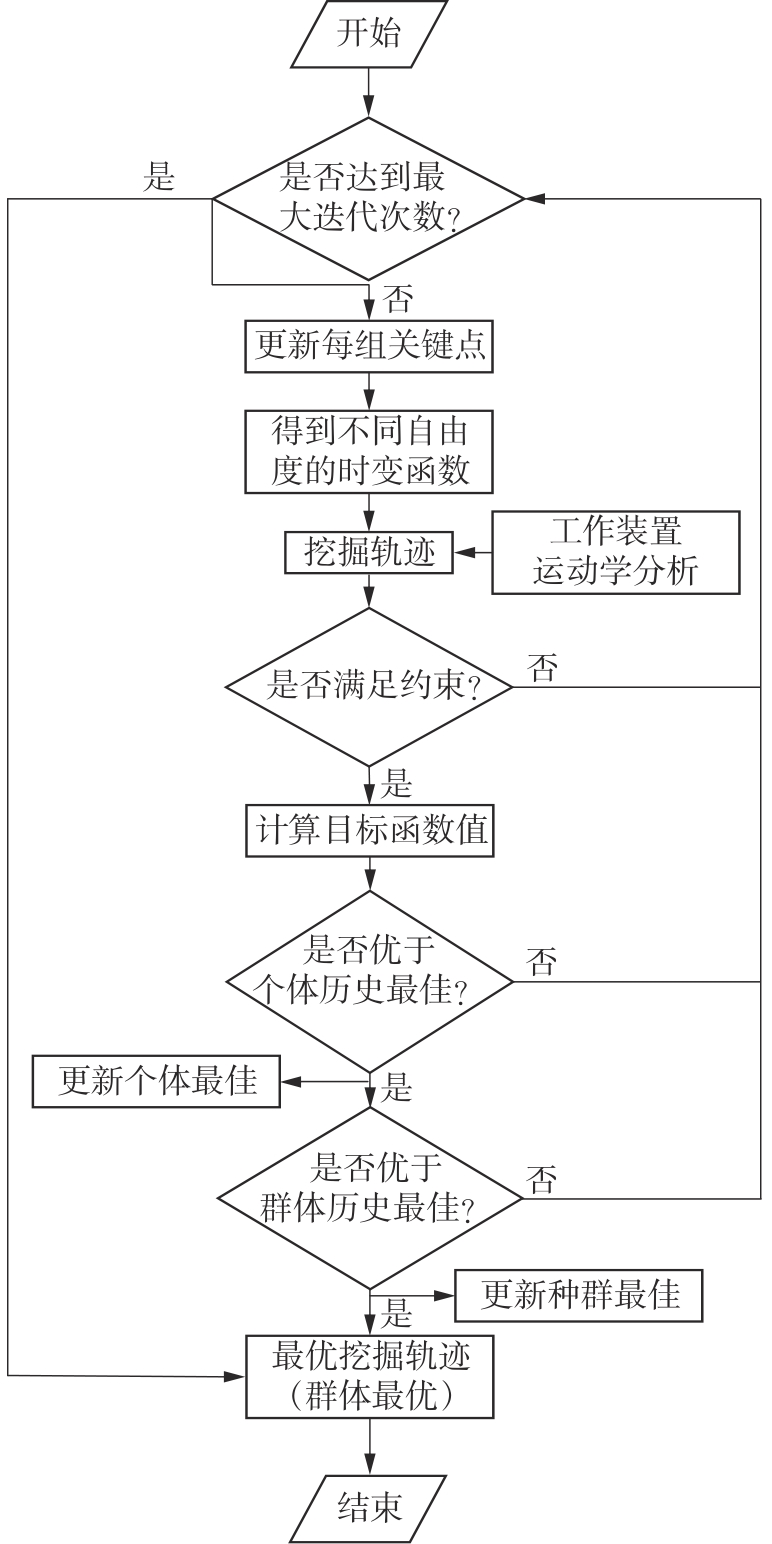
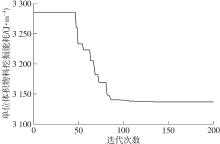
Fig.11
Energy consumption iteration chart for excavating materials per unit volume"
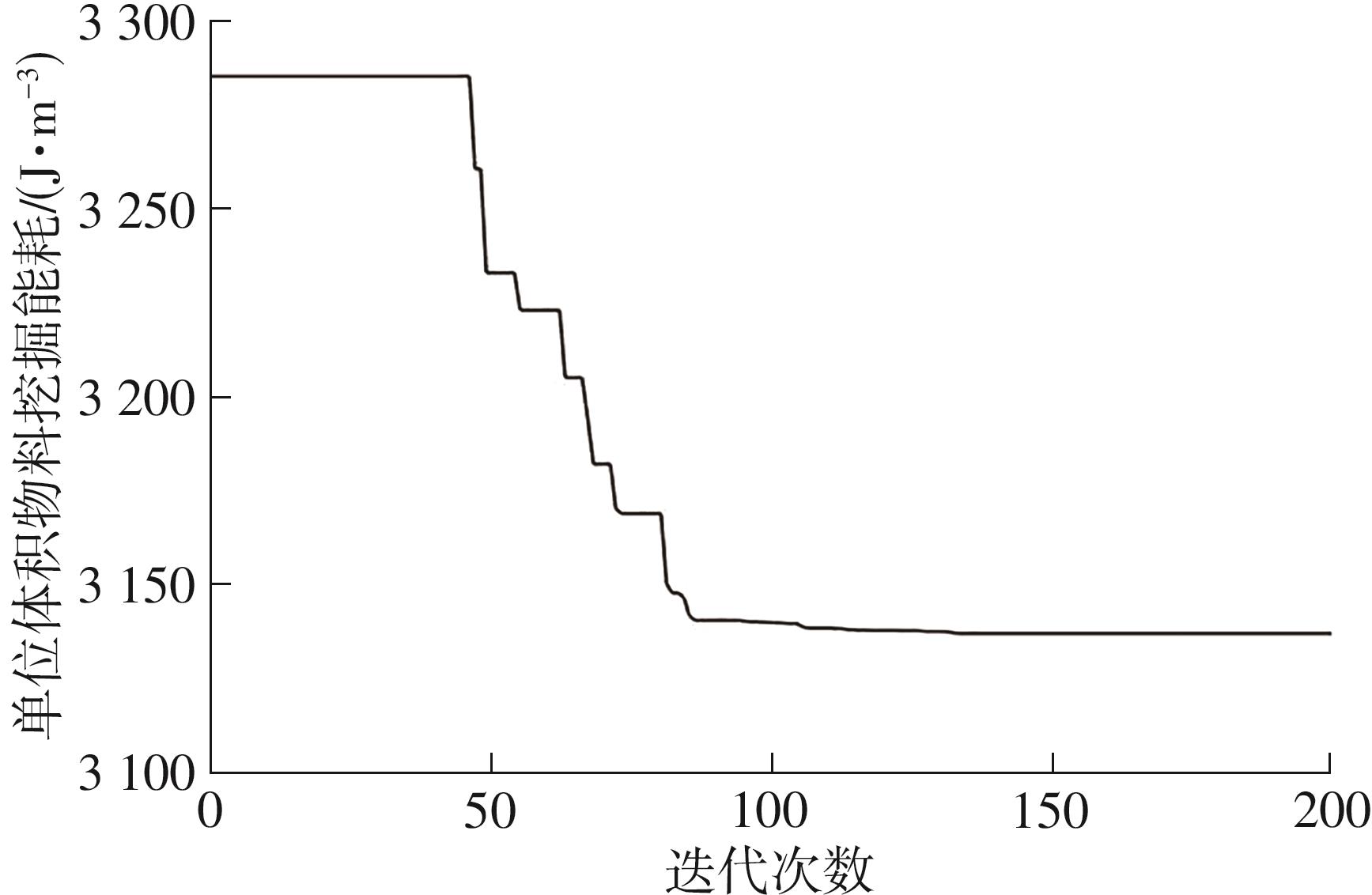
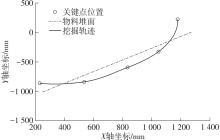
Fig.12
Curves of the optimal excavation trajectory"
Table 1
Main parameters of electric shovel test bench"
| 参数 | 数值 | 参数 | 数值 | ||
|---|---|---|---|---|---|
| 斗杆伸长行程/mm | 400~1 100 | 斗杆组件质量/kg | 25.994 | ||
| 斗杆旋转行程/(°) | 0~120 | 最大推力/N | 4 000 | ||
| 铲斗宽度/mm | 344 | 最大提升力/N | 3 000 | ||
| 铲斗组件质量/kg | 18.071 | ||||

Fig.13
Analysis of trajectory characteristics obtained from cubic polynomial fitting"

Fig.14
Trajectory characteristics obtained from quintic polynomial fitting"
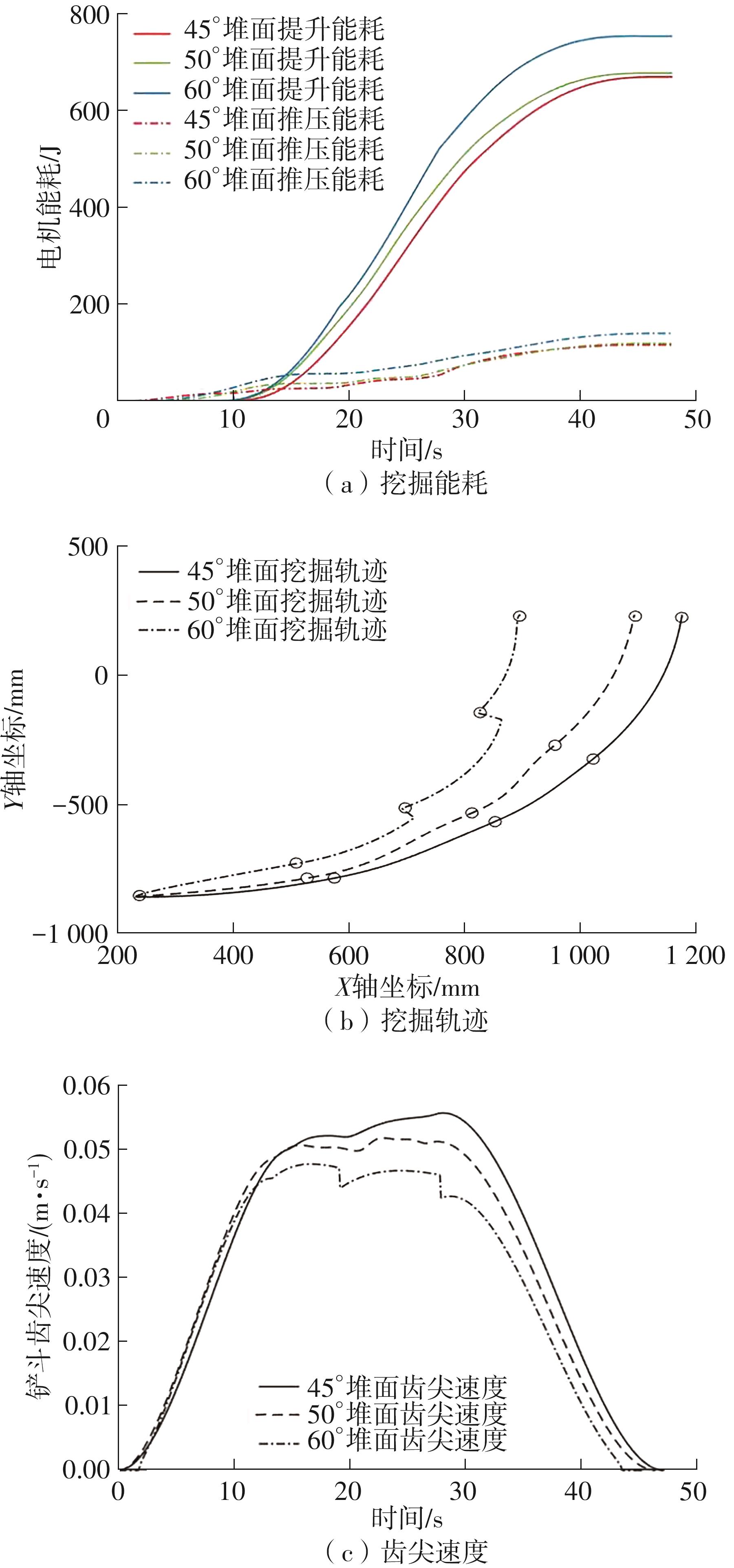

Fig.15
Electric shovel test bench"


Fig.16
Tracking curves of the inputs"
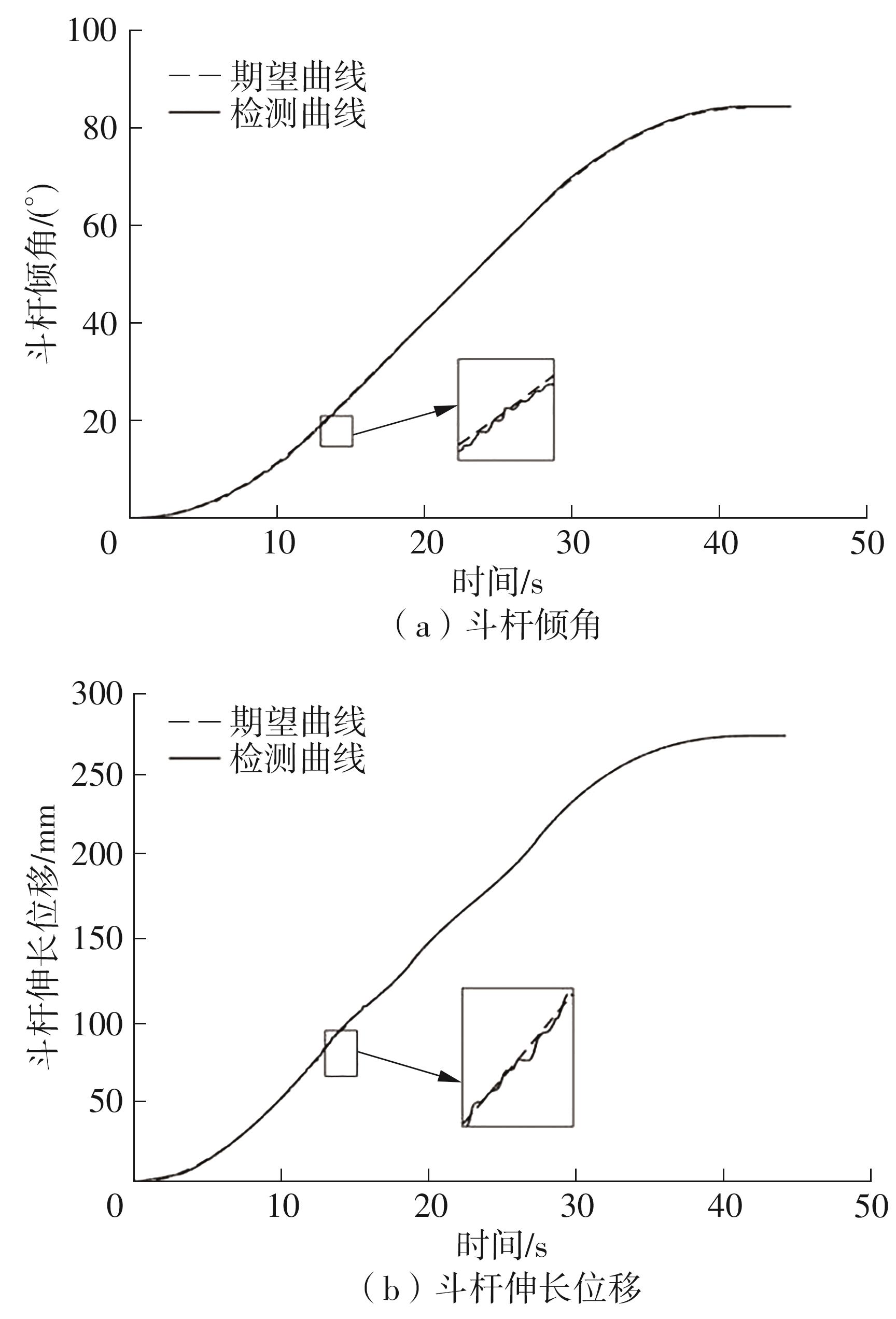
Fig.17
Experimental curves of excavation trajectory"
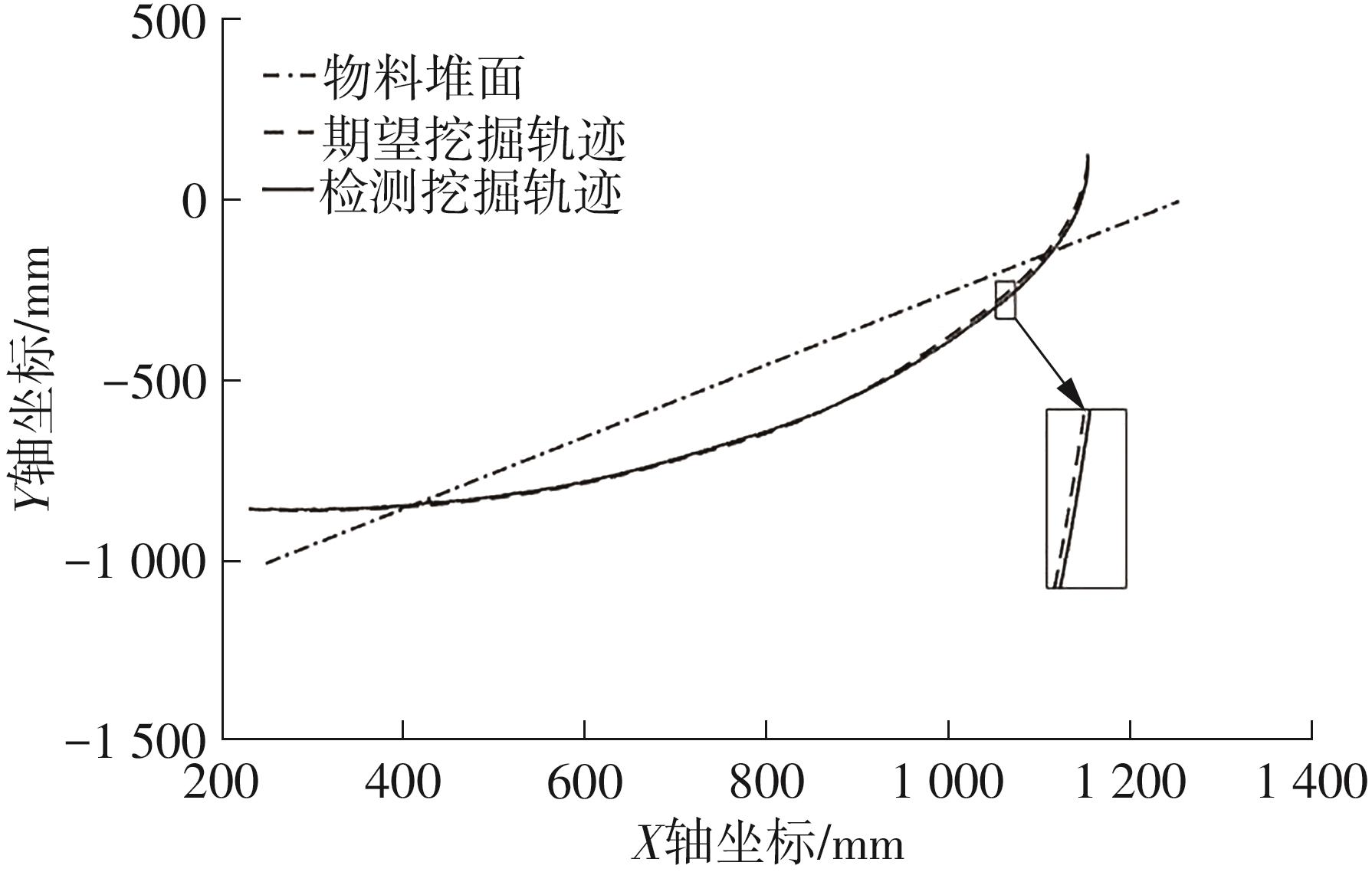
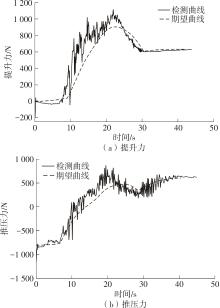
Fig.18
experimental curves of excavation force"
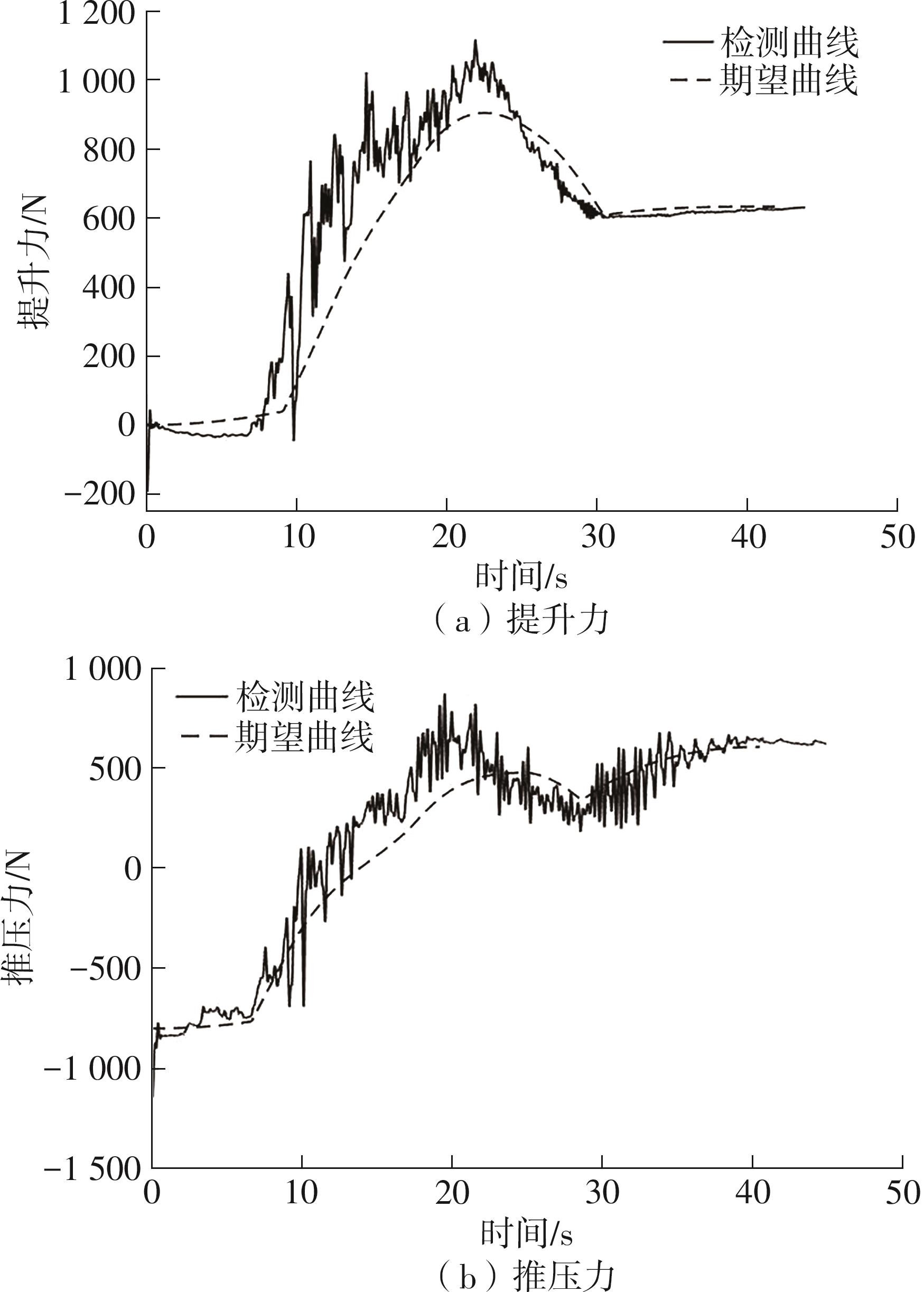
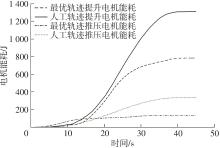
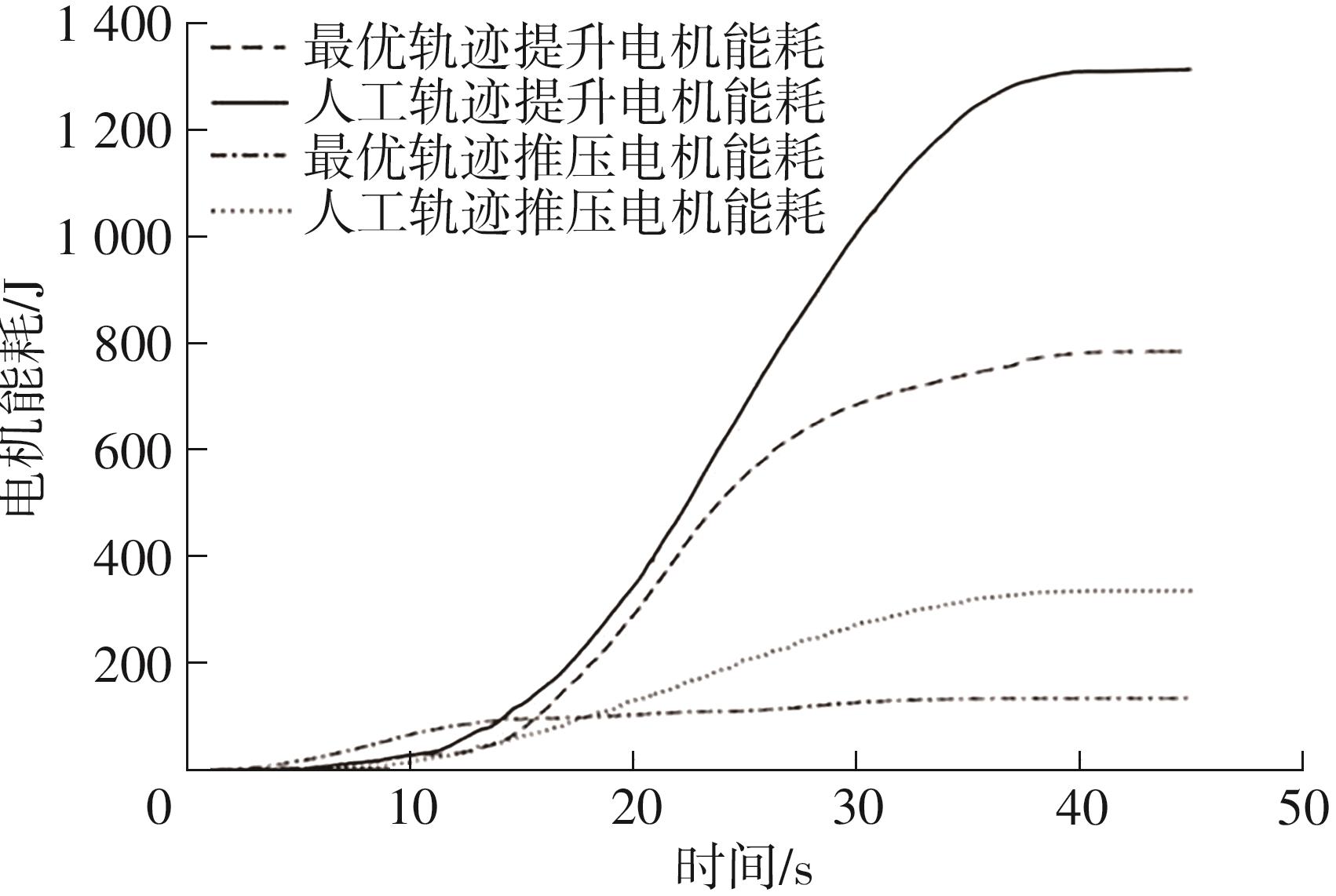
Fig.19
Experimental curves of excavation energy consumption"
| 1 | 中国煤炭工业协会 .2020 煤炭行业发展年度报告[M].北京:应急管理出版社,2021. |
| 2 | 李弘 .露天采矿技术及其采矿设备的发展思考[J].当代化工研究,2022(14):159-161. |
| LI Hong .Development of open-pit mining technology and its mining equipment[J].Contemporary Chemical Research,2022(14):159-161. | |
| 3 | TOPNO S A, SAHOO L K, UMRE B S .Energy efficiency assessment of electric shovel operating in opencast mine[J].Energy,2021,230:120703/1-10. |
| 4 | FRIMPONG S, HU Y, AWUAH-OFFEI K .Mechanics of cable shovel-formation interactions in surface mining excavations[J].Journal of Terramechanics,2005,42(1):15-33. |
| 5 | AWUAH-OFFEI K, FRIMPONG S .Cable shovel digg-ing optimization for energy efficiency[J].Mechanism and Machine Theory,2007,42(8):995-1006. |
| 6 | FU T, ZHANG T, CUI Y,et al .Novel hybrid physics-informed deep neural network for dynamic load prediction of electric cable shovel[J].Chinese Journal of Mechanical Engineering,2022,35(1):147/1-14. |
| 7 | 冯豪,杜群贵,孙有平 .基于子模型的挖掘机结构瞬态动力学研究[J].华南理工大学学报(自然科学版),2018,46(3):29-34,57. |
| FENG Hao, DU Qungui, SUN Youping .Transient dynamics analysis for the structures of the excavator based on sub-modeling method[J].Journal of South China University of Technology (Natural Science Edition),2018,46(3):29-34,57. | |
| 8 | 王同建,杨书伟,谭晓丹,等 .基于 DEM‐MBD 联合仿真的液压挖掘机作业性能分析[J].吉林大学学报(工学版),2022,52(4):820-818. |
| WANG Tongjian, YANG Shuwei, TAN Xiaodan,et al .Performance analysis of hydraulic excavators based on DEM-MBD joint simulation[J].Journal of Jilin University (Engineering Edition),2022,52(4):820-818. | |
| 9 | 梁志鹏,李捷,杨磊 .液压挖掘机分段可变阶挖掘轨迹规划[J].工程机械,2021,52(7):66-72. |
| LIANG Zhipeng, LI Jie, YANG Lei .Segmented variable order excavation trajectory planning for hydraulic ex-cavators[J].Engineering Machinery,2021,52(7):66-72. | |
| 10 | 郭磊 .自主挖掘机器人工作装置轨迹规划研究[D].西安:长安大学,2017. |
| 11 | 陈晋市,张淼淼,毕秋实,等 .面向自主作业的挖掘机多目标最优挖掘运动规划[J].机械工程学报,2022,58(7):237-245. |
| CHEN Jinshi, ZHANG Miaomiao, BI Qiushi,et al .Multi-objective optimal excavator movement planning for autonomous operations[J].Journal of Mechanical Engineering,2022,58(7):237-245. | |
| 12 | 孙祥云,邵辉,赵家宏 .采用粒子群优化算法的液压挖掘机高效空中运动轨迹规划方法[J].华侨大学学报(自然科学版),2014,35(5):498-502. |
| SUN Xiang-yun, SHAO Hui, ZHAO Jia-hong .Efficient air motion’s trajectory planning method of hydraulic excavator based on particle swarm optimization algorithm[J].Journal of Huaqiao University (Natural Science Edition),2014,35(5):498-502. | |
| 13 | 孙志毅,张韵悦,李虹,等 .挖掘机的最优时间轨迹规划[J].机械工程学报,2019,55(5):166-174. |
| SUN Zhiyi, ZHANG Yunyue, LI Hong,et al .Time optimal trajectory planning of excavator[J].Journal of Mechanical Engineering,2019,55(5):166-174. | |
| 14 | 李海虹,林贞国,杜娟,等 .挖掘机自主挖掘分段可变阶多项式轨迹规划[J].农业机械学报,2016,47(4):319-325. |
| LI Haihong, LIN Zhenguo, DU Juan,et al .Piecewise polynomial with variable order in trajectory planning for autonomous mining[J].Transactions of the Chinese So-ciety for Agricultural Machinery,2016,47(4):319-325. | |
| 15 | 穆晓鹏 .矿用电铲运行轨迹控制及液电混驱节能方法研究[D].太原:太原理工大学,2019. |
| 16 | WEI B, GAO F, CHEN J,et al .Mechanics performance of three-degree-of-freedom excavating mechanism of an electric shovel[J].Proceedings of the Institution of Mechanical Engineers,Part C:Journal of Mechanical Engineering Science,2011,225(6):1443-1457. |
| 17 | WEI B, GAO F .Digging trajectory optimization for a new excavating mechanism of Electric mining shovel[C]∥Proceedings of ASME 2012 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference.New York:ASME,2013:1033-1039. |
| 18 | 毕秋实,王国强,陈立军,等 .基于离散元-多体动力学联合仿真的机械式挖掘机挖掘阻力仿真与试验[J].吉林大学学报(工学版),2019,49(1):106-116. |
| BI Qiu-shi, WANG Guo-qiang, CHEN Li-jun,et al .Numerical simulation and experiment on excavation resistance of mechanical excavator based on DEM-MBD co-simulation[J].Journal of Jilin University (Engineering Edition),2019,49(1):106-116. |
| [1] | WEN Huiying, HE Ziqi, HU Yuqing, et al. Calculation and Spatial Distribution Characteristics of Carbon Emissions from New Energy Vehicles on Expressways [J]. Journal of South China University of Technology(Natural Science Edition), 2024, 52(8): 1-13. |
| [2] | ZHAO Qiang, LIU Chuanwei, ZHANG Na, et al. Active Disturbance Rejection Control of Active Stabilizer System Based on Particle Swarm Optimization [J]. Journal of South China University of Technology(Natural Science Edition), 2023, 51(6): 52-61. |
| [3] | CAO Leilei, WANG Liutao, WANG Yan, et al. Fatigue Life Evaluation of Excavator Working Device Based on Equivalent Structural Stress Method [J]. Journal of South China University of Technology(Natural Science Edition), 2022, 50(8): 62-70. |
| [4] | ZHOU Xuan, WANG Xinyao, YAN Junwei, et al. Anomaly Detection of Complex Building Energy Consumption System Based on Machine Learning [J]. Journal of South China University of Technology(Natural Science Edition), 2022, 50(7): 144-154. |
| [5] | CAO Leilei, GUO Chengchen, WANG Yan, et al. Fatigue Analysis of Hydraulic Excavator Working Device Based on Experiment Data [J]. Journal of South China University of Technology(Natural Science Edition), 2021, 49(8): 122-128,139. |
| [6] | JI Tianyao WANG Tingshao. Building Energy Consumption Prediction Based on Word Embedding and Convolutional Neural Network [J]. Journal of South China University of Technology(Natural Science Edition), 2021, 49(6): 40-48. |
| [7] | WAN Yipin SONG Xuding YUAN Zhengwen. Fatigue Test and Fatigue Reliability Evaluation of Loader Working Device [J]. Journal of South China University of Technology (Natural Science Edition), 2020, 48(8): 108-114. |
| [8] | ZHOU Xuan LEI Shangpeng YAN Junwei. Multi-Step Forecasting for Lighting and Equipment Energy Consumption in Office Building Based on Deep Learning [J]. Journal of South China University of Technology (Natural Science Edition), 2020, 48(10): 19-29. |
| [9] | WANG Xuewu XIA Zelong GU Xingsheng. Multi-objective Path Planning of Welding Robot Based on DMOEA/D-ET Algorithm [J]. Journal of South China University of Technology(Natural Science Edition), 2019, 47(4): 99-106. |
| [10] | MA Zhiliang TENG Mingkun REN Yuan. Building Energy Consumption Information Model for Big Data Analysis [J]. Journal of South China University of Technology (Natural Science Edition), 2019, 47(12): 72-77,91. |
| [11] |
YAN Junwei HUANG Qi ZHOU Xuan .
Energy-saving Optimization Operation of Central Air-conditioning System Based on Double-DQN Algorithm
|
| [12] |
YAN Junhua WANG Shuxiao YUAN Haoran CHEN Yong SHAN Rui.
Life Cycle Assessment of Energy Consumption with Emission and Environmental Impact of Electric Vehicle
[J]. Journal of South China University of Technology (Natural Science Edition), 2018, 46(6): 137-144.
|
| [13] | JIN Shan JIN Zhi-gang LIU Yong-lei. A KMP-RBF Fusion Method to Forecast Duty Vehicle's Travel Time [J]. Journal of South China University of Technology (Natural Science Edition), 2017, 45(3): 35-41,47. |
| [14] | ZHANG Hao-jian SU Ting-ting WU Shao-hong ZHENG Jun WANG Yun-kuan. Sorting Route Optimization of Parallel Robot Based on Improved Genetic Algorithm [J]. Journal of South China University of Technology (Natural Science Edition), 2017, 45(10): 93-99. |
| [15] | Li Kang Li Wen-fang Zhang Guo-ge Duan Qi. Micro Arc Oxidation and Layer Characteristics of Binary Al-Si Alloys of Different Si Content [J]. Journal of South China University of Technology (Natural Science Edition), 2015, 43(7): 1-7. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||