2024 Mechanical Engineering
The mining and loading operations are the central link in the open-pit coal mining process, and its energy consumption accounts more than half of the total energy consumption of open-pit coal mining and loading, which determines the mining efficiency and equipment energy consumption. Traditional open-pit coal mining and loading operations are completed by manually operating mining electric shovels, and the process is of low excavation full-bucket rate and high energy consumption. To further reduce the energy consumption and meet the requirements of unmanned and intelligent electric shovels, this paper deals with the optimal excavation trajectory of mining electric shovels. In the research, firstly, a kinematic analysis was conducted on the working device, and the relationship between the pose space and joint space of the working device was revealed through kinematic forward and inverse solutions. Secondly, a dynamic analysis was conducted on the working device of the mining electric shovel. Based on the static analysis of the working device during the excavation process, as well as the analysis of dynamic excavation resistance and material gravity, the Lagrange dynamic equation of the working device was constructed. Then, based on the particle swarm optimization algorithm and the optimization design model of trajectory planning, the optimal excavation trajectory for excavation energy consumption per unit material volume was obtained. Moreover, the effects of material pile surface characteristics, operating parameters and fitting functions on the energy consumption and operation stability of the working device were analyzed, and an excavation trajectory planning strategy that balances energy conservation and stability was proposed. Finally, an experimental study was conducted on the optimal excavation trajectory planning. The results show that the proposed excavation trajectory planning method based on the optimal energy consumption per unit material volume can ensure the efficiency and energy-saving requirement during the excavation with mining electric shovel.
In order to improve the performance of the battery box of electric vehicles and strengthen the safety and reliability of each component, the acceleration response of the battery modules at different positions inside the box was investigated with the battery box body of an electric vehicle, finding that the calculation results of the power spectral density curves of the three groups of battery modules in the z direction are in good agreement with the test results. Then, by considering the dimensional parameters, such as the top cover of the box, the front end parts of the box, the rear end parts of the box, the middle parts of the box, the module fixing brackets and the reinforcement parts, a response surface proxy model, which describes the relationship between the dimensional parameters of the battery box’s main parts and the intrinsic frequency, deformation as well as vibration response, was established, and the random vibration and the mechanical shock of the box were calculated, with the results verifying the correctness of the model. Based on the Box-Behnken response surface method for designing tests, several combinations of tests with six design variables and three levels were obtained, and the corresponding test design matrices were obtained. A polynomial response surface approximation model was fitted using multiple regression analysis, and the model was iterated and optimized using a multi-objective genetic algorithm to obtain the optimal dimensional parameters of the battery box. Experimental results show that, as compared with the original model, the first-order intrinsic frequency in the optimized case increases by 29.12%, the deformation reduces by 29.39%, and the vibration response reduces by 40.31%, which means a successful lightweighting. The modelling and analyzing methods in this paper can be used to calculate the influence of the battery box components on the overall structure of the battery box, improve the performance of the battery box through optimized design, and strengthen the safety and reliability of each component.
The large-size thin-walled shell has large size and mass, and is easy to deform with strict assembly accuracy requirement. In order to meet the high-precision requirement of spacecraft shell docking assembly, it is necessary to actively predict and control the shell assembly deviation. In this paper, a large thin-walled shell is taken as the research object. Based on the small displacement spinor method, the key characteristic errors of cabin are characterized, the geometric error spinor expression of the cabin and the constraint relationship between the spinor parameters are obtained. Then, the cumulative paths of parallel and series assembly chains considering the key feature errors of the shell are established, the assembly deviation of the cabin is characterized based on the Jacobian spinor theory, and an assembly deviation transfer model of the cabin based on the improved Jacobian spinor is obtained. Moreover, the Monte Carlo simulation method is used to numerically simulate the shell assembly step difference qualification rate of the improved Jacobian-Torsor model, with the results being compared with the simulation analysis results. Based on which, a calculation method for quantifying the contributions of various errors is proposed. Finally, by taking the minimum total processing cost as the optimization objective, and the variation relationship of various errors as well as the requirements of assembly order difference as the constraint conditions, an optimal allocation strategy for cabin tolerance considering the error contribution is proposed. The success rate of cabin assembly and the qualified rate of assembly order difference before and after the optimization are then compared, finding that the proposed method increases the qualified rate from the original 88.12% to 99.56%. The research method proposed in this paper provides theoretical reference for designers to carry out active tolerance design.
In order to study the effect of tooth back meshing on the nonlinear dynamic response of the gear system more deeply, a method of analyzing the coupling of tooth transient contact and system dynamics considering the tooth back meshing is proposed. First, the differences in dynamic model and the phase relationship between tooth back meshing and normal meshing are analyzed by studying the mechanism of tooth back meshing. Next, a dynamic model of the gear system considering tooth back meshing is established. Then, a closed-loop “excitation-response-feedback” coupled method is proposed by combining with the dynamic loaded tooth contact analysis (DLTCA). The proposed method can not only can consider the inverse effect of dynamic displacement on the dynamic contact state of the tooth surface, but also can factor in the tooth backlash, flank errors and modification, thus helping obtain more actual dynamic mesh stiffness and system response. The results show that the tooth back meshing mainly affects the nonlinear vibration responses in the speed-down process, while the effect on the speed-up process is not obvious; that increasing the tooth clearance may increase the main resonance speed range of the gear system, while the sensitivity of system vibration to the change of tooth clearance may decrease; that the tooth clearance with small value mainly affects the system nonlinear vibration through the tooth back meshing; and that considering the tooth back meshing may not only change the chaotic rotational speeds, but also change the chaotic state at the same rotational speed. This research provides some theoretical guidance for the nonlinear dynamic control of gear system.
In order to effectively calculate the fatigue life of rubber vibration isolator under random vibration loads, a rubber vibration isolator for air conditioning compressor of an electric vehicle was taken as the research object, and the road spectrum acquisition of rubber vibration isolator was carried out, by which the acceleration signals versus time of rubber vibration isolator were obtained. Then, Fourier transform was used to transform the acceleration signals into the acceleration power spectral density as load input, and a random vibration test of rubber vibration isolator for compressor was carried out under variable temperature and constant humidity conditions, with the cracking of main spring of rubber vibration isolator being observed. Moreover, a finite element model of rubber vibration isolator was established, with its validity being verified by static characteristic tests as the relative error between simulation value and test value is within ±5%. In addition, frequency response of rubber vibration isolator under unit load was analyzed by ABAQUS, that is, extracting and importing stress response PSD of rubber element into Fe-safe, and using acceleration PSD as load input to calculate the fatigue life. The calculated results were compared with the random vibration test results, finding that the predicted life is consistent with test data, with a relative error of only 2.5%, and that fatigue danger position of rubber vibration isolator unit can be effectively predicted. Finally, the structure of rubber vibration isolator was improved, through which the fatigue life of rubber vibration isolator is 2.8 times that before the improvement, meaning that the fatigue life design requirements are successfully met. This study helps to shorten the design cycle of rubber vibration isolator and reduce the cost of sample test.
A compliant precision positioning platform is a core component of precision equipment. The high-speed and high-precision positioning operation requires the platform to possess high response speed and good regulation capabilities. Passive damping can effectively enhance the platform’s rapid response capabilities. To improve the rapid response capability of an XY compliant positioning platform with local resonance damping, this paper proposes an optimization design method that comprehensively enhances modal damping and natural frequency. In the investigation, firstly, based on elasticity theory and Castigliano’s second theorem, the platform stiffness is analytically modeled and synthesized, and the expression for the platform’s natural frequency is derived. Subsequently, aiming at the maximum control gain, a single-objective optimization function composed of natural frequency and the frequency response curve area of the resonant region is formulated, along with the mathematical expression for the platform optimization design problem and a ABAQUS-Python-Matlab joint optimization model. Then, to simplify the complexity of finite element calculations, an equivalent structure for the optimized platform based on the first-order fixed frequency equivalence is established. Moreover, simulation analysis of the optimized platform is conducted, and the optimization design results are compared and analyzed to verify the correctness of the natural frequency analytical expression. Finally, an experimental platform is constructed to perform static, dynamic and trajectory tracking experiments on the XY compliant platform with local resonance damping. The results demonstrate that the proposed comprehensive optimization method can increase the X-axis and Y-axis control bandwidths of the platform respectively by 7.42% and 24.70%, and effectively enhance the trajectory tracking performance of the system.
The turbo-electric drive compressor with exhaust energy recovery function is the development trend of high-power fuel cell air management system. However, the turbo-electric drive compressor has problems such as low pressure ratio and low energy recovery rate under off-design conditions. In this paper, a high-power fuel cell system was taken as the research object. According to the intake and exhaust parameters of the stack, the three-dimensional aerodynamic design of the turbine expander and the compressor was completed. An electrochemical-flow heat transfer one-dimensional coupling model including the fuel cell stack and the turbo-electric drive compressor was established. The accuracy of the model was verified by the stack test data. Based on this model, the influence of turbine flow characteristics and valve adjustment methods on the exhaust energy recovery rate under full operating conditions was further studied. The results show that under the condition of small and medium load, the exhaust energy recovery rate increases by 5.26 percentage points for every 0.1 reduction of turbine flow coefficient. However, small flow coefficient will cause high stack pressure at the design point, so it is necessary to increase the pressure relief of bypass valve, which leads to the high complexity of the system and big exhaust energy loss. When the turbine flow coefficient is 1, a better energy recovery rate can be obtained under all working conditions. In addition, the valve preposition scheme is better than the postposition scheme, and the valve preposition can increase the energy recovery rate by 6.25% under off-design conditions. Combined with the scheme of turbine flow coefficient of 1 and valve preposition, the exhaust energy recovery rate of the turbo-electric drive compressor is 33.07% and 27.31% respectively at the design flow point and 50% design flow point.
Structural uncertainty is commonly encountered in practical structural engineering problems. Considering the impact of uncertain factors on modal parameters is of significant importance in enhancing the robustness of structural dynamic analysis. In most developed methods involving the solution or estimation of random modal parameters for linear structures, the modal parameters are usually seen as Gaussian variables, and correlation among them is not getting much attention. However, the Gaussian and independence assumptions of the random mode parameters create simulation errors, affecting the robustness of the structural dynamics response predictions. To address this issue, this study proposed two approaches for simulating random modal parameters of respective discrete and continuous structures. For a discrete structure, its mode shapes are discrete. The random modal parameters are treated as correlated random variables. The correlated polynomial chaos expansion (c-PCE) method was applied to simulate non-Gaussianity and correlation based on the statistics of modal parameters. For continuous structures, random mode shapes are seen as correlated random fields. They can be represented in terms of correlated random variables by using the improved orthogonal series expansion method. Then they were combined with random natural frequencies to constitute a set of correlation variables, which are enabled to be simulated using standard Gaussian variables by utilizing the c-PCE. Finally, taking the truss structure and the plate structure respectively as examples, considering the non-Gaussianism of the modal parameters caused by the fluctuation of material parameters, the proposed random mode parameters can accurately simulate the statistical characteristics of the modal parameters, and further predict the random response of the structure. The simulation results verify the simulation accuracy of the proposed method for the random mode parameters and the necessity to consider the parameter correlations.
Wearing ankle prosthesis is an important means for patients with below-knee amputations to restore walking ability. The lower limb prostheses are divided into passive prostheses and power prostheses according to whether it can actively output torque. Power prostheses are further divided into active prostheses and active-passive hybrid prostheses. Passive ankle prostheses cannot provide active torque and have limited application scenarios. Powered ankle prostheses can output active torque, but it has the problem of incompatibility between low passive friction and high active transmission ratio. To improve the performance and adaptability of ankle prosthesis, this research proposed a new configuration of active-passive hybrid ankle prosthesis based on the principle of electro-hydraulic actuation from the perspective of practical application. Firstly, based on the analysis of the angle and torque of the human ankle joint, it designed the driving system of the ankle prosthesis and proposed the overall design scheme of the active-passive hybrid ankle prosthesis. Then, the mathematical model of the prosthesis system was established, the rationality of the prosthesis system was verified by the simulation analysis of the hydraulic system of the prosthesis, and the principle prototype of the prosthesis was developed. Finally, the performance of the prosthesis was verified by bench test and human walking experiment. The test results show that the maximum active output torque of the prosthetic ankle joint is 28 N·m when the walking speed is 1.0 m/s (close to the average walking speed of adults). The research results show that the active-passive hybrid ankle prosthesis proposed in this research can realize the active assist function in the human walking process, and can better fit the human ankle movement posture, enhance the wearing adaptability, and further reduce the volume and mass of the prosthetic. The work in this research provides a design idea and reference for the research of dynamic lower limb prosthesis.
The slender truss boom is a key working component of the crane with truss boom, and unloading rebound impact is an important working condition that threatens the safety of slender truss boom crane. To address the dynamic behavior of slender truss booms under unloading impact, this paper used rigid flexible coupling multi-body simulation method and crane unloading impact experimental method to explore the variation law of dynamic stress under unloading rebound conditions of the truss boom, and the unloading impact dynamic load coefficient was calculated based on the dynamic stress of the truss boom. A refined simulation model of a boom tower crane equipped with slender truss booms was established using a rigid flexible coupling method, which includes load model and structural dynamic characteristic model. It analyzed the dynamic stress changes caused by the rebound vibration of the truss boom, and the distribution law of peak dynamic stress during unloading rebound of truss booms was discovered. According to the lifting performance table of cranes with different boom lengths, the relationship between the elevation stress relationship curve and the lifting performance curve was studied, and the sudden unloading condition of the crane corresponding to the maximum stress in the middle of the boom occurred was found. Based on the simulated results of crane unloading impact, a crane unloading impact experiment method based on simulation prediction was established. The sudden unloading impact experiment of the series of boom tower cranes was carried out. The error between the experimental and simulated values of the truss boom dynamic stress is less than 13%, proving that refined model simulation is an effective tool for solving the unloading impact dynamic response of truss boom. Through model simulation, the unloading impact dynamic load coefficient of the slender truss boom under critical situations was further predicted. It finds that there are defects in the relevant regulations on unloading impact dynamic load coefficient in the current crane design specifications. The impact of the truss boom slenderness ratio on the unloading impact dynamic load coefficient was explored, providing a basis for the optimization design of key crane structures.
Considering coupling characteristics of forces and contact gaps of tooth between planet gear pairs for double-helical planetary gears sets (DHPG) with one set planet gears whose free axial movement is restricted by sun gear and ring gear, this paper proposed a numerical method of loaded tooth contact analysis (LTCA) for DHPG, which provides theoretical references of tooth design and performance analysis for the important application of power split and convergence double helical gears. Firstly, based on the meshing theory, finite element method and optimization method, it established the equations of the deformation coordination, the balance of the meshing total force, and the forces balance of the radial and axial floating components. Secondly, precise geometric and mechanical characteristics of left and right tooth of each inner and outer gear pair were integrated closely,which can better reflect the mutual coupling effect of the distribution force system of gear pairs. Finally, load distribution, bearing deformations, load sharing coefficients and floating displacements of each gear pair were obtained quickly based the LTCA with finite element numerical calculation once.The result show that Radial floating of the sun and ring gear is contributed to load sharing of the planet gears, while axial free floating of planet gear is contributed to load sharing of left and right tooth of planet gears. In case of opposite axial forces on both tooth flank of planet gear without floating, namely overall axial force of the planet gear being greatly offset, the axial floating displacements are a little for planet gear with floating, so the load sharing of left and right tooth is improved a little.Conversely, in case of axial forces from the same direction on both tooth flank of planet gear without floating, the axial floating displacements are much for planet gear with floating, and the load sharing of left and right tooth is improved significantly. Besides, both the amplitude and mean value of loaded transmission are reduced, which are contribute to improving dynamic performances of DHPG with floating components. Furthermore, the geometric transmission error, load sharing coefficient and axial force of the inner gear pair are basically the same as the outer gear pair. It is the key to ensure the free axial movement of the planet gear based on structure to improve the uneven loads sharing between left and right teeth for DHPG.
Aluminium-magnesium alloy is widely used in various fields due to its good material properties such as light weight and corrosion resistance. In view of the low efficiency of aluminum grinding alloy grinding wheel, the difficult surface quality and the surface adhesion of grinding wheel, this study proposed the use of abrasive belt grinding technology for the processing of aluminium-magnesium alloys. In order to study the law of grinding process of aluminium-magnesium alloy abrasive belt as well as the problem of adhesion characteristics easily produced in the grinding process, the study used 36, 60 two mesh alumina ceramic, silicon carbide, zirconium corundum abrasive belts to carry out experiments on aluminium-magnesium alloy grinding, and analyzed the material removal rate of aluminium-magnesium alloy, the noise of grinding, the energy consumption of grinding, and the rule of change of the abrasive belt material adherence rate under different grinding pressures and the rotational speed of abrasive belt. The results show that: under the same grinding parameters, zirconium corundum abrasive belt has the highest material removal rate and the lowest adhesion rate due to better abrasive toughness, impact resistance and sharpness, but the grinding noise and energy consumption are greater. So in aluminium-magnesium alloy abrasive belt grinding, zirconium corundum abrasive belts can be chosen to improve the grinding efficiency if the influence of noise and energy consumption is not considered. After the grinding pressure of three abrasive belts reaches 20 N, the adhesion rate of the abrasive belt reaches a stable formation stage, and the abrasive chips block the abrasive grain gap, which reduces the material removal efficiency. This conclusion can provide a reference for the selection of grinding pressure parameters for aluminium-magnesium alloy grinding belts. Within the range of process para-meters of 10~30 N and 1 500~3 500 r/min, the grinding pressure and the speed of abrasive belts have a great influence on the material removal rate and adhesion rate. However, the grinding belt speed has a greater effect on grinding noise, and the grinding pressure has a greater effect on grinding energy consumption. The conclusions of the study can provide certain reference for improving the efficiency and quality of aluminium-magnesium alloy belt grinding and reducing the grinding noise and energy consumption.
Exploring the material flow behavior during the closed die forging is the theoretical basis for controlling forming defects such as insufficient filling and obtaining high-precision die forgings. In response to the problem of insufficient filling during hot die forging of gear blanks with deep spoke, this study selected the SCr420H gear blank with deep spoke as the research object and designed a multi-station closed hot die forging process of “cutting—heating—upsetting—preforging Ⅰ—preforging Ⅱ—final forging” based on structure analysis of the gear blank. Based on Deform, it established a finite element simulation model for the entire process of multi-station closed hot die forging. The reliability of the finite element model was verified by the experimental results, and the material flow law during the multi-station closed hot die forging process was studied. The results show that a circular cake shaped blank can be obtained when the upsetting ratio is 3.7. The material flow along radial direction is uneven due to the friction effect between the upper and lower surfaces, resulting in a bulge shape at the waist of the billet during upsetting. A concave structure was formed on the bottom surface for positioning during pre-forging station Ⅰ, and it reduced the difficulty of material filling in subsequent stations. The material flow law during pre-forging Ⅱ and final forging are similar. The material mainly flows to the wheel flange part in the early stage of forming. It mainly flows to the wheel hub part in the middle stage, and flows to the rounded corner in the late stage. There is no defect of insufficient material filling during final forging. In the late forming stage, a small amount of metal material flows out of the guide gap of the upper and lower die of the final forging, forming a longitudinal flying edge. Through the production test, the well-filled gear blank with deep spoke was formed. The maximum error between the simulated value and the actual production value is not more than 3.15%, the longitudinal flying edge height is less than 0.5 mm, and the size deviation of each part is less than 0.2 mm, which verifies the rationality of the designed multi-stage closed die forging process.
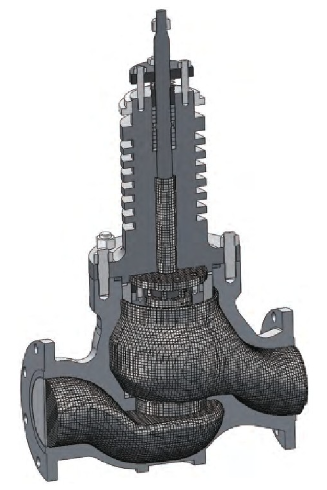
Aiming at the problem that the unbalanced force and sealing force under high-temperature and high-pressure conditions are difficult to reach the required leakage level, a double spool pilot cage type control valve was designed, in which a large spool and a small spool work together in sections and the medium pressure in front of the valve is fully utilized to increase the sealing force of the valve seat. Then, the calculation equation of unbalanced force, the flow equation and the flow characteristics of the valve were analyzed, the fluid flow was simulated, and the pressure loss after the fluid flows through the control valve was analyzed. Moreover, the fluid flow in the inner cavity of the large valve spool was simulated, and the pressure before the valve, the temperature in the inner cavity as well as the sealing force was analyzed. The motion simulation of large and small spools was also carried out, and the driving force of the actuator, the axial resultant force of the valve spindle and the speed of the large spool were all discussed. The results of valve body’s pressure-tight test and valve seat’s leakage test of normal-temperature medium show that there is no visible leakage and deformation in the valve body; and that the measured leakages of three tests are respectively 1, 1 and 2 drops per minute when the set leakage is 10 drops per minute. In addition, the results of valve seat’s leakage test of high-temperature medium show that, when the set leakage is 1.275 mL/min, the measured leakages of three tests for 250 ℃ high-temperature steam are respectively 0.11, 0.11 and 0.13 mL/min, while those for 300 ℃ high-temperature steam are respectively 0.19, 0.19 and 0.22 mL/min, finding that all the measured leakages are less than the set ones. The double valve spool pilot cage structure proposed in this paper enhances the sealing force of the regulating valve, and, the pressure strength of the valve body and the sealing performance of the valve seat both meet the use requirements.
Aiming at the durability problem of electromagnets for proportional valves of construction machinery, in order to improve the resistance of electromagnets to thermal failure under random load conditions, a parametric redesign model of proportional electromagnets was proposed based on multi-physical field coupling theory and robust optimization theory. By taking a proportional electromagnet with basin-type suction structure as the research object, the effectiveness of the proposed parametric model was verified through steady-state electromagnetic test and temperature distribution test. Under the premise of ensuring the accuracy of electromagnetic calculation, the parameters such as magnetic conductivity and heat transfer with fuzzy magnitude in the system were calibrated. With the main structural parameters of electromagnet and coil as control factors, and with the random error of wire diameter of coil enameled co-pper wire caused by the uncertainty of production process as noise factor, orthogonal tests were designed based on Taguchi method, and the evaluation function of the thermal robustness redesign of multi-factor weighted proportional electromagnet was defined. Then, with the thermal load of the proportional electromagnet obtained in the field test of the excavator as the response calculation heat source, the redesign of the key structural parameters with the minimum system response variation under noise disturbance was carried out, under the constraint of allowable temperature rise that does not cause the coil insulation failure. The results show that the coil length and the number of turns are the main factors affecting the thermal robustness of the electromagnet, and that the coil window shape determined by the winding process determines the magnetic permeability and heat transfer capability of the system. The thermal robustness redesign method of proportional electromagnet proposed in this paper is of engineering reference value for the custo-mized design of electromechanical products under magneto-thermal coupling.
Rapid mold manufacturing can be used to print wax molds for investment casting, shorten the production cycle and improve the production efficiency. However, in the actual forming process, due to the uneven temperature distribution in different positions of the workpiece, the internal stress will be different, which may result in warping deformation, and then have a significant impact on the forming quality of the workpiece. Moreover, due to the constraints of forming parameters such as 3D printing speed and deposition layers’ number, it is difficult to reduce the degree of warping deformation of the workpiece and improve the forming efficiency simultaneously. To solve this problem, this paper establishes a mathematical model for the warping deformation of formed parts, and combines experimental design and mathematical calculation methods to explore the influence mechanism of printing speed on the degree of warping deformation and printing efficiency of casting wax direct writing. Experimental results show that, at a certain printing speed, the warpage value decreases with the increase of the number of deposition layers, while gradually increases with the continuous increase of printing speed; and that the higher the printing speed, the closer the printing time of different samples is to a certain stable value, which means that the impact of printing speed on the forming efficiency decreases with the increase of printing speed. In addition, by assigning weight coefficients respectively to the forming warping deformation and the printing efficiency, a continuous function model for the optimal printing speed of surface contours is established, and the effectiveness of the model is verified. The results show that the continuous function model of optimal printing speed based on the warping deformation of casting wax can simultaneously reduce the warping deformation and improve the printing efficiency.
In view of the lack of effective treatment for neurogenic and myogenic bladder, a new solution, namely an artificial bladder detrusor system, was proposed from an engineering perspective. Based on the shape memory effect of shape memory alloy (SMA) springs, a system structure consisting of a wireless power transfer module, a control module, a feedback module and an executive module was designed to realize the assisted urination in accordance with human urodynamics. A finite element model of human bladder was established, and the storage process as well as the assisted urination process of the human bladder was simulated and analyzed. Based on the simulation results and the mathematical model of SMA springs, the structural parameters of SMA spring actuator were optimized. Then, the temperature-free height equation of SMA springs was derived according to experimental data. Furthermore, by combining with the thermodynamic formula and the spring mathematical model, the system control equation was derived, and an open-loop control strategy of the system was proposed on this basis. Finally, based on the feedback module of the system, a proportional integral differential (PID) closed-loop control strategy was designed, and a simulation experiment platform was constructed to study the urine flow rate characteristics of the system. The results indicate that the principle of the system is feasible, and that the assisted urination process is continuously controllable. Under different urine volumes, the two control strategies can both achieve assisted urination in accordance with human urodynamic principles. This research can provide guidance for the design of clinically applicable artificial bladder detrusor system and also offer a reference for the design of other implantable devices using SMA springs as actuators.
In the service process of self-lubricating joint bearings, the wear of the liner leads to the gap between the inner and outer rings of the self-lubricating joint bearings. The existence of the clearance of the self-lubricating remote pair accelerates the collision between the inner and outer rings and further wear of the liner, which has a great impact on the dynamic characteristics of the self-lubricating joint bearings. In addition, the wear of the liner will also lead to the deterioration of the nonlinear characteristics of each component and reduce the stability of self-lubricating joint bearings. In order to study the effects of the wear of the self-lubricating liner on the dynamic response of the self-lubricating joint bearing, this study established the kinematic subvector model of self-lubricating joint bearing with clearance. Firstly, it modeled the collision force at the gap between the inner and outer rings by modifying the Lankarani-Nikravesh (L-N) normal contact force model and improving the Coulomb friction force model. Then, based on Newton’s second law, it established the rigid-flexible coupling dynamic equation with gap. Finally, it analyzed the dynamic characteristics of the drive system of the self-lubricating knuckle bearing with clearance under different wear amount and friction factor. And it also analyzed the nonlinear characteristics of the self-lubricating knuckle bearing by using phase diagram and Poincare mapping diagram. The results show that the dynamic behavior of the inner and outer rings of the self-lubricating joint bearing exhibits nonlinear characteristics with the increase of the wear amount of the fabric liner. When the wear amount is certain, the stability of the system is improved with the increase of the friction factor of the liner, and the occurrence of chaos is suppressed.
In order to further improve the transmission efficiency of the cycloidal pinwheel reducer, this study conducted in-depth research on the influence of the reducer transmission efficiency. It proposed a calculation model for the transmission efficiency of the cycloidal pinwheel reducer that takes into account changes in design parameters and working condition parameters and optimized the parameters. Firstly, considering the friction force and meshing backlash, the study established a multi-tooth load-bearing contact analysis model of the cycloid pinwheel transmission mechanism, and calculate the meshing force and load distribution pattern of the cycloid pinwheel gear. Then, considering the engagement loss, output loss, bearing loss, lubrication loss and sealing loss, this paper proposed a calculation model for the transmission efficiency of the cycloidal pinwheel reducer, and analyzed the influence of the design parameters and working condition parameters on the transmission efficiency of the cycloidal pinwheel reducer. Research shows that, taking frictional stress into account, rotation speed, load, pin tooth pin radius, pin tooth distribution circle radius, eccentricity, and pin tooth sleeve radius are the main parameters that affect transmission efficiency, followed by the number of pin teeth, pin distribution circle radius, pin radius and cycloid tooth width. Finally, the optimal parameter solution was obtained through a multi-objective optimization analysis of the design parameters with gear strength, gear width, tooth profile shape, inter-tooth clearance and load-bearing capacity as the parameter optimization range, and transmission efficiency and volume as the goals. And then a smaller volume and more efficient cycloidal pinwheel reducer was obtained.
The internal noise sources of the bent-axis piston motor are close in distance. For example, the distance between the inlet and outlet of the motor valve plate is 38 mm, and the noise sources have the same frequency and multiple frequency phenomenon. The dense and complex noise sources in the bent-axis motor cause difficulties for the spectrum analysis method to accurately identify the same frequency and multiple frequency signals. The maximum resolution of traditional sound intensity measurement is 50 mm, which cannot meet the requirement of identification accuracy of motor internal noise source. Aiming at the problem that the traditional methods are difficult to identify the motor noise sources accurately, this paper proposed a sound intensity measurement method based on compressed sensing. The compressed sensing theory was applied to the high-precision reconstruction of sound intensity image to obtain the high-resolution sound intensity reconstruction image of the motor. Firstly, the noise radiation simulation of the bent-axis motor was carried out to obtain the characteristics of its external surface sound field. Then, based on the sound intensity image for the motor, a compressed sensing frame applied to the motor sound field was designed to obtain the sound intensity cloud image of the motor with high precision. Finally, the feasibility of the compressed sensing theory to improve the identification accuracy of motor noise source was verified by comparing the traditional acoustic intensity measurement with the compressed sensing acoustic intensity measurement. The results show that the identification scale of motor noise sources are improved from 70 mm to 30 mm by the sound intensity measurement method based on compressed sensing, which improves the accuracy of motor noise sources identification and realizes the high precision location of motor noise sources.
Hydraulically-driven heavy-duty manipulator arms are widely used in construction and mining machinery, and there is an urgent need for its automatic control in the industry. However, the strong parametric uncertainties and difficult-to-model dynamics of the hydraulic system and other factors bring certain challenges to its automatic control. This paper studied the position tracking control problem of a class of heavy-duty hydraulic manipulator arm driven hydraulic cylinders by taking an anchor drilling truck as an example, and proposed a model feedforward compensation active disturbance rejection controller. To solve the control problems caused by nonlinear factors such as variable load, dead zone, parametric uncertainties and friction under heavy loads, the study adopted the control method of combining model feedforward and active disturbance rejection feedback, and established the mechanism model of the system by combining the mechanism dynamics model of the heavy-duty hydraulic manipulator arm and the model of proportional valve-controlled hydraulic cylinders. Then based on the mechanism model of the system, it constructed the feedforward compensation part of the controller, and designed an extended state observer to observe the unmodeled factors of the system in real time, and the active disturbance rejection controller was constituted together with the feedback adjustments based on the state error. The experimental studies were carried out on a real heavy-duty hydraulic manipulator arm, and the results show that the model feedforward compensation active disturbance rejection controller has smaller hysteresis and tracking error than PID controller, and the overall tracking accuracy is improved by 63.5% compared with that of PID controller. This indicates that the designed controller can overcome the adverse effects of the nonlinear factors of the hydraulic system very well, and it has a higher robustness than the PID controller. Therefore, the designed control method is more suitable for the position tracking control of this kind of heavy-duty hydraulic manipulator arm.
 2024 Mechanical Engineering
2024 Mechanical Engineering
