Journal of South China University of Technology(Natural Science Edition) ›› 2025, Vol. 53 ›› Issue (2): 48-57.doi: 10.12141/j.issn.1000-565X.240225
• Traffic Safety • Previous Articles Next Articles
Foggy Road Environment Perception Algorithm Based on an Improved CycleGAN and YOLOv8
YUE Yongheng, LEI Wenpeng
- School of Civil Engineering and Transportation,Northeast Forestry University,Harbin 150040,Heilongjiang,China
-
Received:2024-05-09Online:2025-02-25Published:2025-02-03 -
About author:岳永恒(1973—),男,博士,副教授,主要从事交通安全及控制理论及应用研究。E-mail: yueyyh@126.com -
Supported by:the National Natural Science Foundation of China(62173107);the National Automobile Accident In-Depth Investigation System Funding Project(NAIS-ZL-ZHGL-2020018);the Key R & D Program of Heilongjiang Province(JD22A014)
CLC Number:
Cite this article
YUE Yongheng, LEI Wenpeng. Foggy Road Environment Perception Algorithm Based on an Improved CycleGAN and YOLOv8[J]. Journal of South China University of Technology(Natural Science Edition), 2025, 53(2): 48-57.
share this article
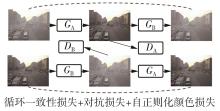
Fig.1
CycleGAN model structure"
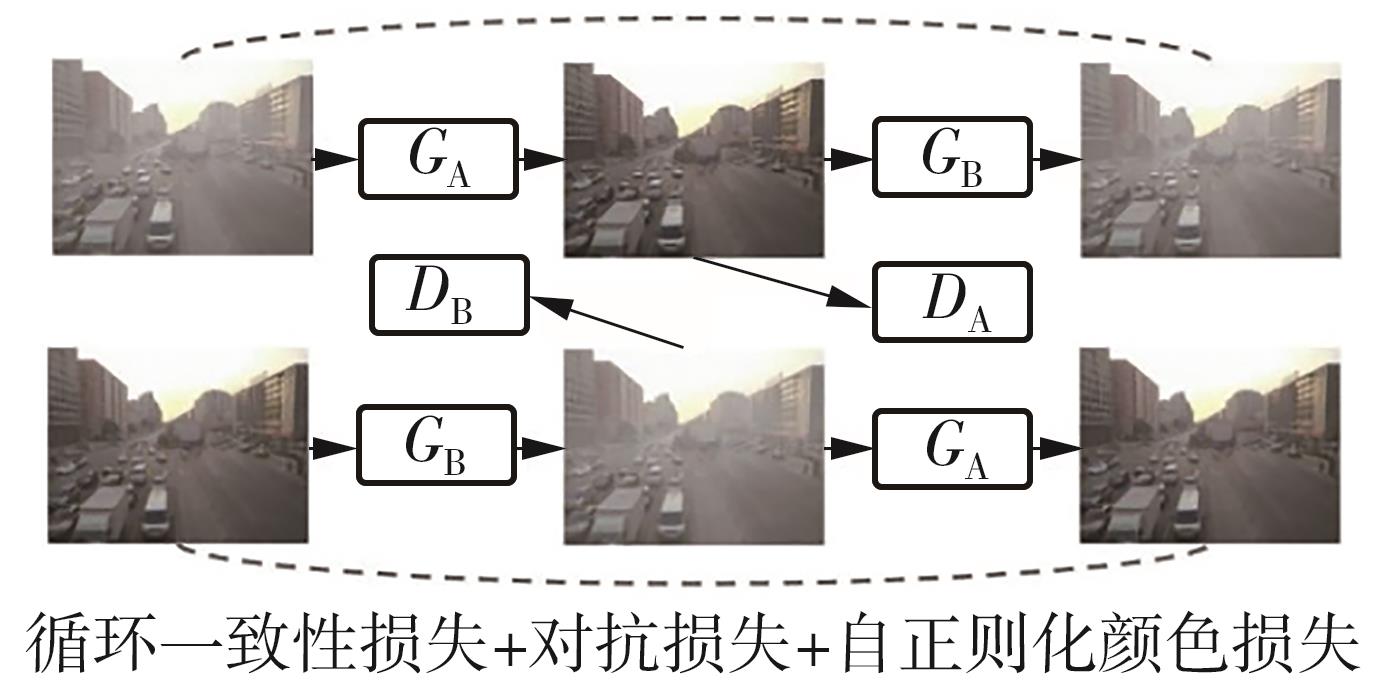
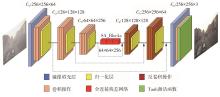
Fig.2
Generator network structure"
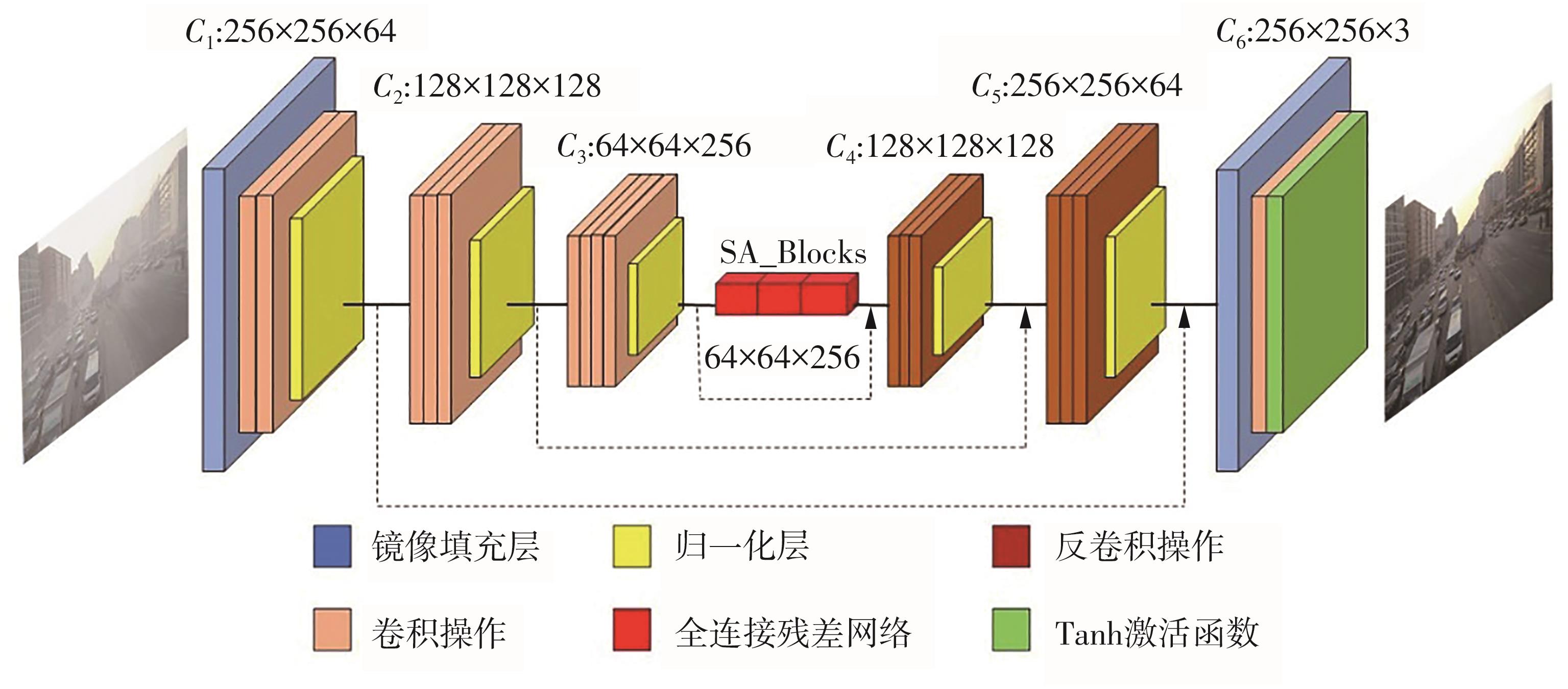

Fig.3
YOLOv8 network structure"
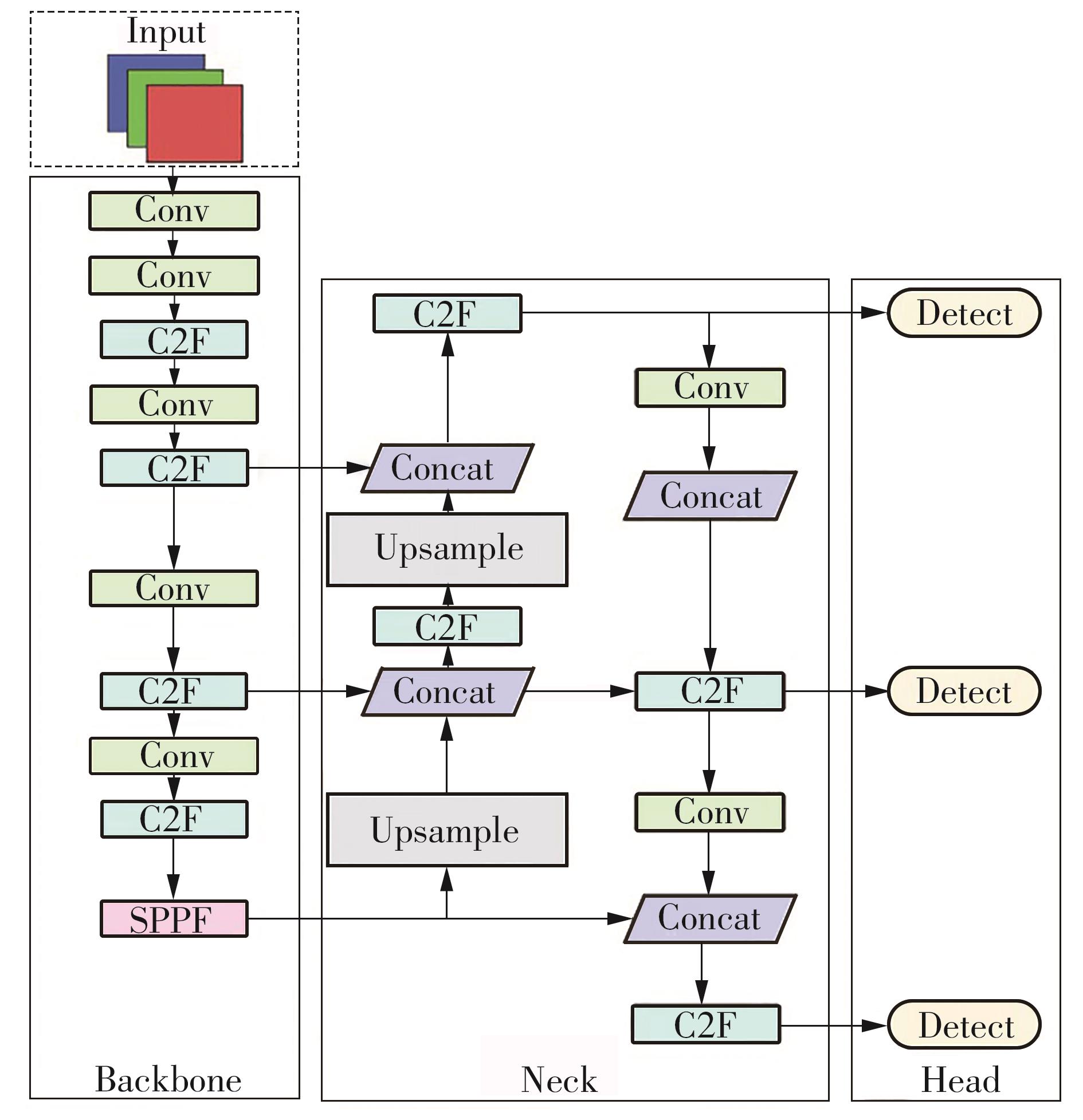
Fig.4
Improved YOLOv8 model structure"
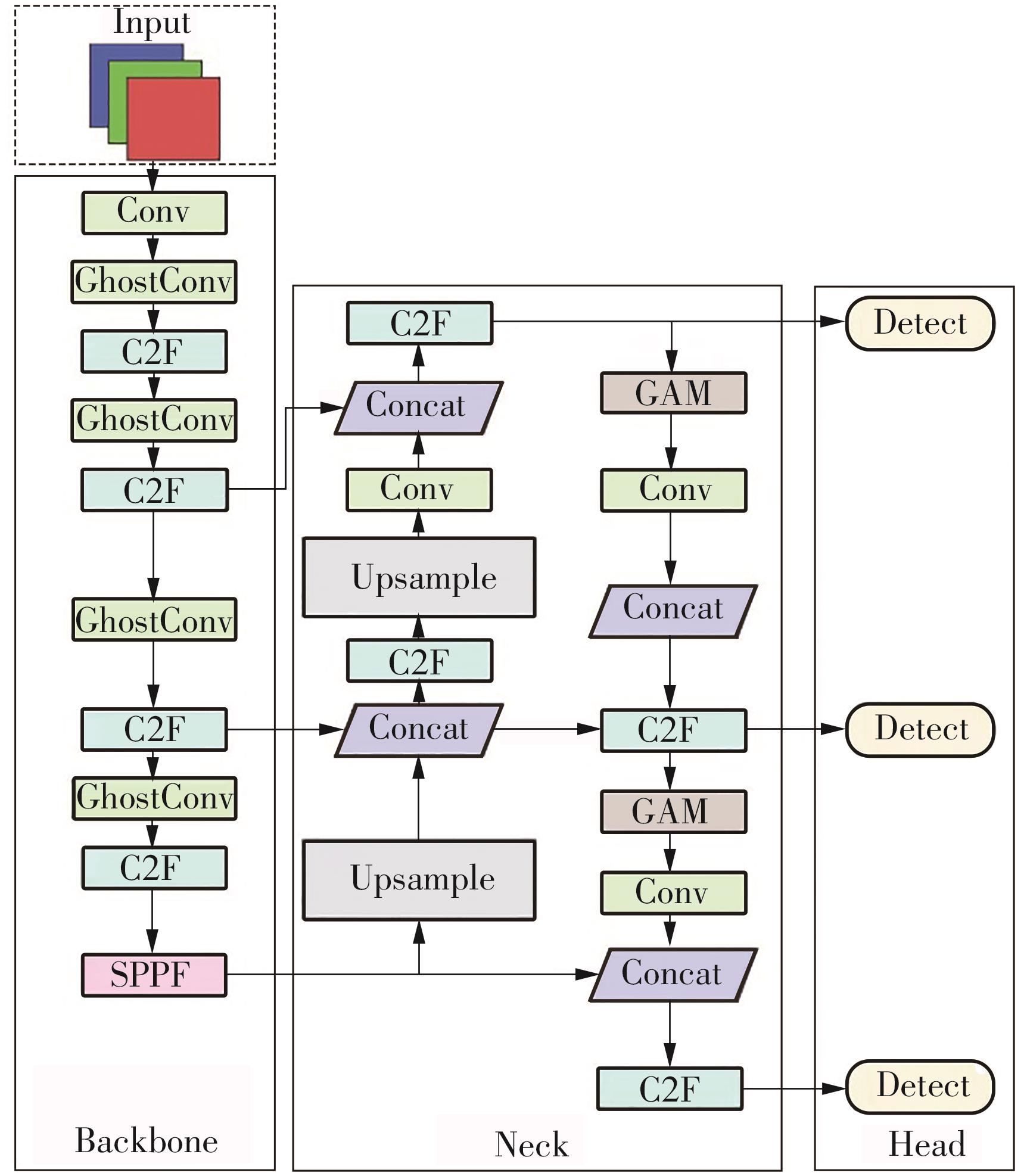
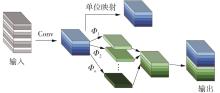
Fig.5
GostConv convolution"


Fig.6
GAM attention module"
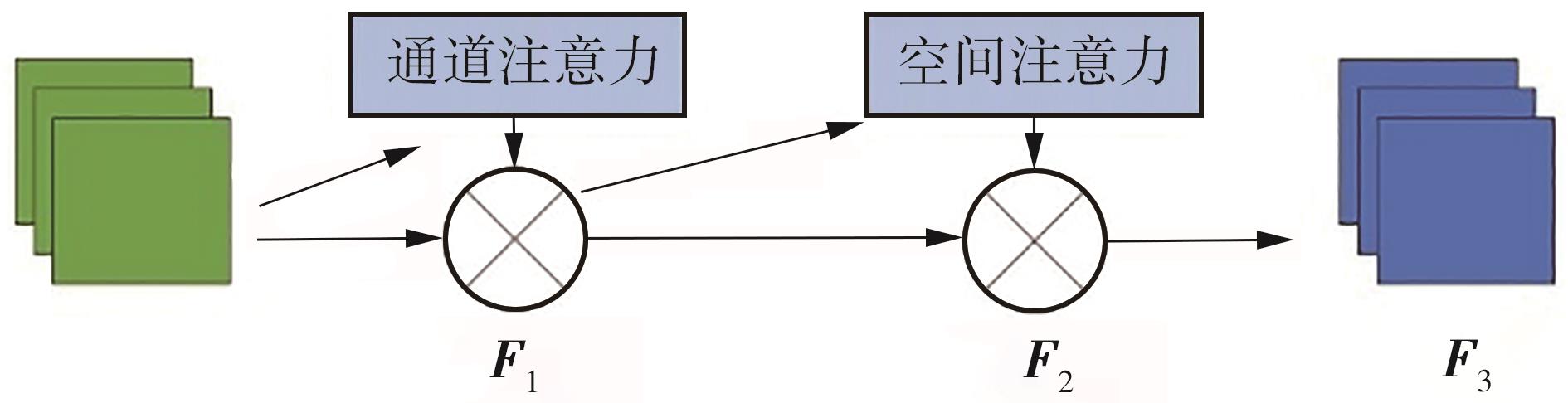

Fig.7
Channel attention module"


Fig.8
Spatial attention module"


Fig.9
Dehazing algorithms effects comparison"
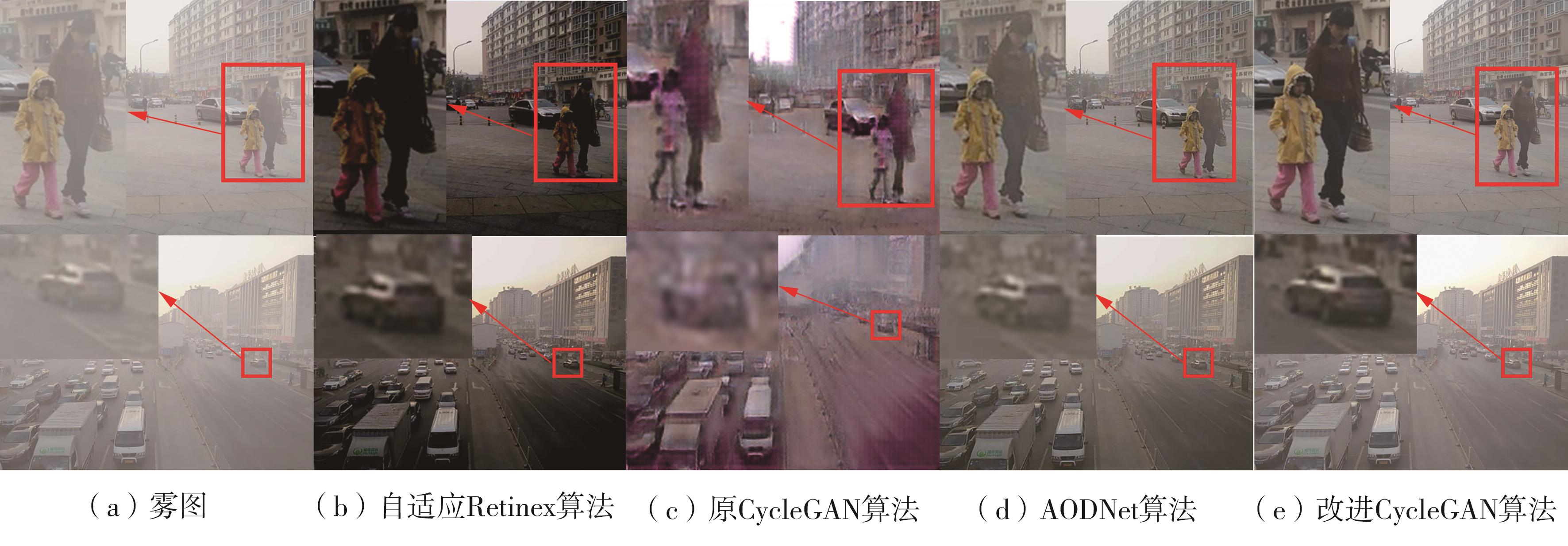
Table 1
Dehazing algorithms comparison evaluation indicators"
| 算法 | XSNR /dB | SSIM |
|---|---|---|
| 自适应Retinex | 10.849 0 | 0.391 |
| AODNet | 20.495 4 | 0.595 |
| CycleGAN | 19.854 0 | 0.704 |
| 改进CycleGAN | 22.101 7 | 0.858 |
Table 2
Result of the dehazing algorithm ablation experiment"
| 方法 | XSNR/dB | SSIM |
|---|---|---|
| 原CycleGAN模型 | 19.854 0 | 0.704 |
| +自注意力机制 | 21.083 7 | 0.816 |
| +自注意力机制+自正则化颜色损失函数 | 22.101 7 | 0.858 |
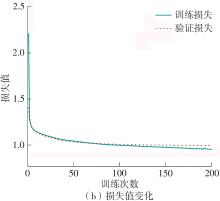
Fig.10
MAP and loss value change"

Table 3
BDD100k datasets ablation test results"
| 实验组别 | 模块 | P/% | PM/% | 参数量/106 | ||
|---|---|---|---|---|---|---|
| GhostConv | GAM | WIoU | ||||
| 1 | ×1) | × | × | 58.9 | 46.6 | 3.01 |
| 2 | √2) | × | × | 55.9 | 46.5 | 2.82 |
| 3 | √ | √ | × | 61.1 | 47.1 | 3.70 |
| 4 | √ | √ | √ | 61.4 | 47.7 | 3.70 |
Table 4
KITTI datasets ablation test results"
| 实验组别 | 模块 | P/% | PM/% | 参数量/106 | ||
|---|---|---|---|---|---|---|
| GhostConv | GAM | WIoU | ||||
| 1 | × | × | × | 82.6 | 83.2 | 3.01 |
| 2 | √ | × | × | 80.5 | 82.7 | 2.82 |
| 3 | √ | √ | × | 84.2 | 84.8 | 3.70 |
| 4 | √ | √ | √ | 84.5 | 85.7 | 3.70 |
Table 5
Experiment compare results"
| 算法 | PA/% | PM/% | R/% | vFPS/(帧·s-1) | 参数量/106 | |||||
|---|---|---|---|---|---|---|---|---|---|---|
| Person | Car | Bus | Truck | Bike | Motor | |||||
| SSD | 19.1 | 45.0 | 36.4 | 29.9 | 25.9 | 22.2 | 29.7 | 30.0 | 79.13 | 26.29 |
| Faster R-CNN | 41.0 | 70.8 | 52.5 | 46.1 | 25.7 | 24.3 | 43.4 | 41.6 | 43.31 | 137.10 |
| YOLOv5 | 41.3 | 69.2 | 50.6 | 45.2 | 25.4 | 26.1 | 43.0 | 38.4 | 86.95 | 1.90 |
| YOLOv8 | 48.5 | 73.6 | 53.2 | 49.8 | 29.8 | 25.1 | 46.6 | 42.9 | 90.91 | 3.20 |
| 改进YOLOv8 | 48.0 | 73.0 | 56.6 | 48.4 | 30.5 | 29.7 | 47.7 | 44.7 | 81.30 | 3.70 |
Table 6
Joint detection models experimental comparison"
| 算法 | 参数量/106 | vFPS/(帧·s-1) |
|---|---|---|
| CycleGAN-YOLOv8 | 12.2 | 79.23 |
| 改进CycleGAN-改进YOLOv8 | 13.1 | 68.83 |

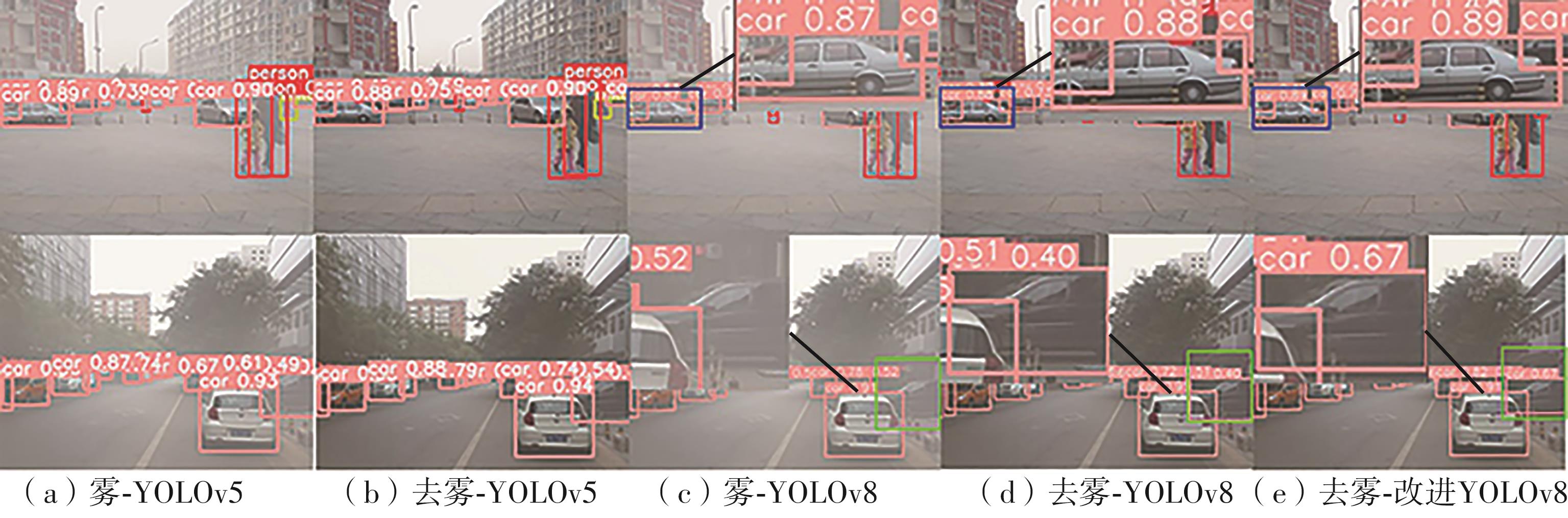
Fig.11
Detection effects comparison"
| 1 | 彭湃,耿可可,王子威 .智能汽车环境感知方法综述[J].机械工程学报,2023,59(20):281-303. |
| PENG Pai, GENG Keke, WANG Ziwei .Overview of environmental perception methods for intelligent vehicles [J]Journal of Mechanical Engineering,2023,59(20):281-303. | |
| 2 | 赖镜安,陈紫强,孙宗威,等 .基于YOLOv5的轻量级雾天目标检测方法[J].计算机工程与应用,2024,60(6):78-88. |
| LAI Jing’an, CHEN Ziqiang, SUN Zongwei,et al .Lightweight foggy target detection method based on YOLOv5[J].Computer Engineering and Applications,2024,60(6):78-88. | |
| 3 | CHOW T Y, LEE K H, CHAN K L .Detection of targets in road scene images enhanced using conditional GAN-based dehazing model[J].Applied Sciences,2023,13(9):5326. |
| 4 | LI B, PENG X, WANG Z,et al .An all-in-one network for dehazing and beyond[J].arXiv Preprint arXiv:1707.06543,2017. |
| 5 | ZHANG X, DONG H, HU Z,et al .Gated fusion network for degraded image super resolution[J].International Journal of Computer Vision,2020,128:1699-1721. |
| 6 | ENGIN D, GENÇ A, KEMAL E H .Cycle-dehaze:Enhanced cyclegan for single image dehazing[C]∥Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition Workshops.Salt Lake City :IEEE,2018:825-833. |
| 7 | YAN B, YANG Z, SUN H,et al .ADE-CycleGAN:a detail enhanced image dehazing CycleGAN network[J].Sensors,2023,23(6):3294. |
| 8 | GIRSHICK R, DONAHUE J, DARRELL T,et al .Rich feature hierarchies for accurate object detection and semantic segmentation[C]∥Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition. Columbus:IEEE, 2014:580-587. |
| 9 | REN S, HE K, GIRSHICK R,et al .Faster r-cnn:towards real-time object detection with region proposal networks[J].Advances in Neural Information Processing Systems,2017,39(6):1137-1149. |
| 10 | REDMON J, DIVVALA S, GIRSHICK R,et al .You only look once:unified,real-time object detection[C]∥Proceedings of the IEEE conference on Computer Vision and Pattern Recognition.Las Ve-gas:IEEE,2016:779-788. |
| 11 | HAN K, WANG Y, TIAN Q,et al .Ghostnet:more features from cheap operations[C]∥Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition.Seattle:IEEE,2020:1580-1589. |
| 12 | WU T, KU T, ZHANG H. Research for image caption based on global attention mechanism[J]∥Second Target Recognition and Artificial Intelligence Summit Forum,2020,11427:679-684. |
| 13 | TONG Z, CHEN Y, XU Z,et al .Wise-IoU:bounding box regression loss with dynamic focusing mechanism[J].arXiv Preprint arXiv:2301.10051,2023. |
| 14 | ZHENG Z, WANG P, LIU W,et al .Distance-IoU loss:faster and better learning for bounding box regression[C]∥Proceedings of the AAAI conference on artificial intelligence.New York:IEEE,2020:12993-13000. |
| 15 | GOODFELLOW I, POUGET-ABADIE J, MIRZA M,et al .Generative adversarial nets[J].Advances in Neural Information Processing Systems,2014,27:139-144. |
| 16 | WANG C, MENG Z, XIE R,et al .A single image dehazing algorithm based on cycle-gan[C]∥Proceedings of the 2019 International Conference on Robotics,Intelligent Control and Artificial Intelligence.Long Beach:IEEE,2019:247-251. |
| 17 | VASWANI A, SHAZEER N, PARMAR N,et al .Attention is all you need[J].Advances in Neural Information Processing Systems,2017,30:6000-6010. |
| 18 | HE K, ZHANG X, REN S,et al .Spatial pyramid pooling in deep convolutional networks for visual recognition[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,2015,37(9):1904-1916. |
| 19 | LIU S, QI L, QIN H,et al .Path aggregation network for instance segmentation[C]∥Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition. Salt Lake City:IEEE,2018:8759-8768. |
| 20 | LI B, REN W, FU D,et al .Benchmarking single-image dehazing and beyond[J].IEEE Transactions on Image Processing,2018,28(1):492-505. |
| 21 | YU F, CHEN H, WANG X,et al .Bdd100k:a diverse driving dataset for heterogeneous multitask learning[C]∥Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition.Seattle:IEEE, 2020:2636-2645. |
| 22 | WEI C, WANG W, YANG W,et al .Deep retinex decomposition for low-light enhancement[J].arXiv Preprint arXiv:1808.04560,2018. |
| 23 | LIU W, ANGUELOV D, ERHAN D,et al .Ssd:single shot multibox detector[C]∥ Proceeding of the Computer Vision-ECCV 2016:14th European Conference.Amsterdam:Springer International Publishing,2016:21-37. |
| [1] | LUO Yutao, MAO Haojie. Single-Stage Object Detection Network with Enhanced Pillar Feature Encoding [J]. Journal of South China University of Technology(Natural Science Edition), 2025, 53(3): 1-11. |
| [2] | HUANG Yangyang, XU Yong, XI Xing, et al. A Novel Approach to Addressing Label Bias in Open-World Object Detection [J]. Journal of South China University of Technology(Natural Science Edition), 2025, 53(3): 12-19. |
| [3] | YUE Yongheng, NING Ruihou. Intelligent Vehicle Object Detection Algorithm Based on Lightweight CenterNet [J]. Journal of South China University of Technology(Natural Science Edition), 2024, 52(8): 45-55. |
| [4] | GUO Enqiang, FU Xinsha. Dropped Object Detection Method Based on Feature Similarity Learning [J]. Journal of South China University of Technology(Natural Science Edition), 2023, 51(6): 30-41. |
| [5] | DU Qiliang, XIANG Zhaoyi, TIAN Lianfang. Real Time Statistics Method of Escalator Passenger Flow for Embedded Devices [J]. Journal of South China University of Technology(Natural Science Edition), 2022, 50(6): 60-70. |
| [6] | YAO Qiangqiang, TIAN Ying, WANG Shengyuan, et al. Research on Path Tracking Control Strategy of Intelligent Vehicles Based on Force Drive [J]. Journal of South China University of Technology(Natural Science Edition), 2022, 50(2): 33-41,57. |
| [7] | YI Qingming, LÜ Renyi, SHI Min, et al. Lightweight Object Detection Combined with Multi-Scale Dilated-Convolution and Multi-Scale Deconvolution [J]. Journal of South China University of Technology(Natural Science Edition), 2022, 50(12): 41-48. |
| [8] | FU Xinsha, PENG Jinhui, ZENG Yanjie, et al. Road Markings Condition Assessment Method for Intelligent Vehicles [J]. Journal of South China University of Technology(Natural Science Edition), 2022, 50(11): 1-13. |
| [9] | TAN Guang LI Changhao ZHAN Zhaohuan. Adaptive Scheduling Algorithm for Object Detection and Tracking Based on Device-Cloud Collaboration [J]. Journal of South China University of Technology (Natural Science Edition), 2021, 49(7): 86-93. |
| [10] | LI Bo RAO Haobo. Salient Object Detection Based on Feature Enhancement in Complex Scene [J]. Journal of South China University of Technology (Natural Science Edition), 2021, 49(11): 135-144. |
| [11] | LIU Weiming, WEN Junrui, ZHENG Zhongxing, et al. DifferentNet: Neural Network for Foreign Objects Foreground Detection in Metro [J]. Journal of South China University of Technology(Natural Science Edition), 2021, 49(10): 11-21,40. |
| [12] | WU Qiuxia, LI Lingmin. 3D Object Detection Based on Point Cloud Bird's Eye View Remapping [J]. Journal of South China University of Technology(Natural Science Edition), 2021, 49(1): 39-46. |
| [13] | ZENG Dequan, YU Zhuoping, XIONG Lu, et al. Intelligent Vehicle Obstacle Avoidance Trajectory Planning in Structured Road Based on Analytic Hierarchy Process [J]. Journal of South China University of Technology (Natural Science Edition), 2020, 48(7): 65-75. |
| [14] |
LIU Jieping YANG Yezhang WEI Gang .
A Fast Single Image Dehazing Algorithm Based on Dark Channel Prior
|
| [15] | WEI Weibo LI Shuai PAN Zhenkuan HOU Guojia ZHAO Shengnan. Single Color Image Dehazing Based on the Basis of H-NL-MTV Model [J]. Journal of South China University of Technology (Natural Science Edition), 2018, 46(12): 34-41,50. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||