华南理工大学学报(自然科学版) ›› 2024, Vol. 52 ›› Issue (8): 76-88.doi: 10.12141/j.issn.1000-565X.230229
所属专题: 2024年交通运输工程
基于TsGAN的自动驾驶汽车高速公路变道切入测试场景自动生成算法
朱宇1 徐志刚1 赵祥模1 王润民1 曲小波2
- 1.长安大学 车联网与智能汽车测试技术研究院,陕西 西安 710018
2.清华大学 车辆与运载学院,北京 100084
-
收稿日期:2023-04-11出版日期:2024-08-25发布日期:2024-04-02 -
通信作者:徐志刚(1979—),男,博士,教授,博士生导师,主要从事智能交通、车路协同、自动驾驶等研究。 E-mail:xuzhigang@chd.edu.cn -
作者简介:朱宇(1989—),男,博士生,助理研究员,主要从事自动驾驶汽车测试研究。E-mail: yu.zhu@chd.edu.cn -
基金资助:陕西省杰出青年科学基金资助项目(2023-JC-JQ-45);国家重点研发计划项目(2021YFB2501200);国家自然科学基金重点资助项目(52232015);陕西省重点研发计划项目(2021LLRH-04-01-03)
TsGAN-Based Automatic Generation Algorithm of Lane-Change Cut-in Test Scenarios on Expressways for Autonomous Vehicles
ZHU Yu1 XU Zhigang1 ZHAO Xiangmo1 WANG Runmin1 QU Xiaobo2
- 1.IoV and CAV Testing Technology Research Institute, Chang’an University, Xi’an 710018, Shaanxi, China
2.School of Vehicle and Mobility, Tsinghua University, Beijing 100084, China
-
Received:2023-04-11Online:2024-08-25Published:2024-04-02 -
Contact:徐志刚(1979—),男,博士,教授,博士生导师,主要从事智能交通、车路协同、自动驾驶等研究。 E-mail:xuzhigang@chd.edu.cn -
About author:朱宇(1989—),男,博士生,助理研究员,主要从事自动驾驶汽车测试研究。E-mail: yu.zhu@chd.edu.cn -
Supported by:the Shaanxi Science Fund for Distinguished Young Scientists(2023-JC-JQ-45);the National Key Research and Development Program of China(2021YFB2501200);the Key Project of the National Natural Science Foundation of China(52232015);the Key Research and Development Program of Shaanxi Province(2021LLRH-04-01-03)
摘要:
前方相邻车道车辆变道切入自动驾驶车辆所在车道是典型的高速公路自动驾驶高风险场景,在实际高速公路上进行该类场景的复现测试存在非常高的安全风险,虚拟仿真测试是解决该问题的最佳途径之一。为自动生成批量化的高保真高速公路变道切入测试场景,该文提出了一种基于时间序列生成对抗网络(TsGAN)的自动驾驶汽车高速公路变道切入测试场景自动生成算法。该算法以变道切入时刻两车的车头时距和侧向时距为场景危险程度评价指标,从高速公路真实轨迹数据集highD中提取4类不同危险程度的2 853个变道切入场景实例,基于TsGAN构建变道切入测试场景生成模型,并利用所提取的真实轨迹数据训练模型;其后,采用所构建的模型生成前车变道轨迹和测试车变道切入时刻前的运行轨迹,通过比较所生成的变道轨迹与真实轨迹之间的分布相似性、频谱误差,验证所生成的轨迹的真实性。该文还分析了所生成的场景中变道切入时刻两车的运动关系及轨迹参数分布,检验了自动生成的场景在自然场景中的覆盖度。结果显示:从轨迹关键参数的分布来看,TsGAN模型生成的变道轨迹与真实轨迹的平均相似度达79.7%,平均频谱误差小于8%,落在最相似真实轨迹缓冲区的轨迹超过83.2%,表明所生成的轨迹具有高真实性;与所采集的真实场景相比,所生成的场景实例覆盖范围更大,在参数区间内分布更均匀,变道切入时刻前方变道车辆与测试车的车头时距和侧向时距分别降低了17.83%和16.37%(平均值),车辆轨迹参数分布区间平均增长了19.44%,表明所生成的场景在自然场景中具有较高的覆盖度;所提出的基于TsGAN的场景生成模型可模拟4种不同危险程度的变道切入测试场景,具有较强的针对性。
中图分类号:
引用本文
朱宇, 徐志刚, 赵祥模, 等. 基于TsGAN的自动驾驶汽车高速公路变道切入测试场景自动生成算法[J]. 华南理工大学学报(自然科学版), 2024, 52(8): 76-88.
ZHU Yu, XU Zhigang, ZHAO Xiangmo, et al. TsGAN-Based Automatic Generation Algorithm of Lane-Change Cut-in Test Scenarios on Expressways for Autonomous Vehicles[J]. Journal of South China University of Technology(Natural Science Edition), 2024, 52(8): 76-88.

图1
典型变道切入场景模型"

表1
轨迹的关键参数"
| 场景变化过程 | 轨迹参数 | 描述 |
|---|---|---|
| 变道 起始阶段 | 车辆C的轨迹起点 | |
| 车辆F的轨迹起点 | ||
| 变道起始阶段车辆C的轨迹特征参数 | ||
| 变道 切入时刻 | 变道切入时刻车辆C的轨迹斜率 | |
| 变道 结束阶段 | 车辆的C的轨迹终点 | |
| 车辆F的轨迹终点 | ||
| 变道结束阶段车辆C的轨迹特征参数 |

图2
变道轨迹的形态特征示例"


图3
所提取的真实变道切入场景的分类"
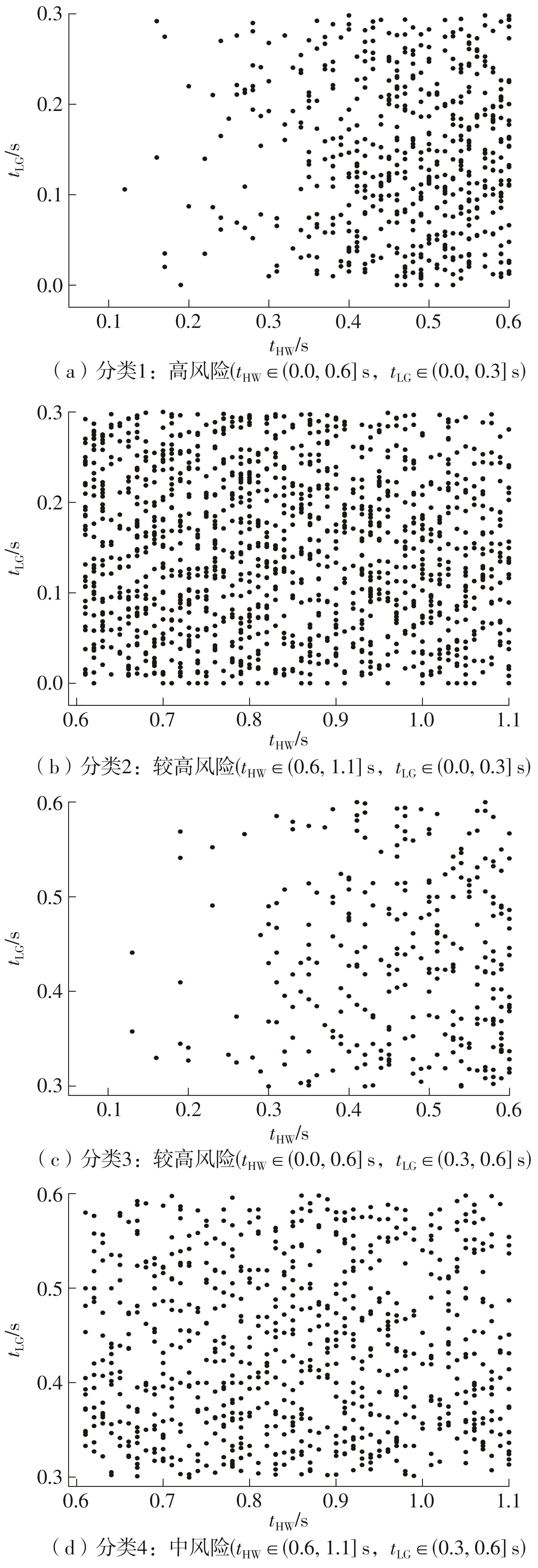

图4
基于TsGAN的测试场景生成模型的基本结构Guloss、Geloss和Gsloss分别为对抗损失、重建损失和监督损失,Eloss为编解码损失函数,Sloss为生成器监督损失函数,Dloss为判别器损失函数,V^为生成轨迹判别结果,V为真实轨迹判别结果,W̃1:Ts为还原轨迹序列,V^e为生成器初级生成轨迹序列的判别结果,E^1:Ts为生成器初级生成轨迹序列的隐编码,H1:Ts-1为在t∈t1,t2,…,Ts-1时刻的真实轨迹隐编码,H¯2:Ts为真实轨迹的监督序列"

表2
测试场景生成模型的参数设置"
| 模型参数 | 取值 |
|---|---|
| 输入训练轨迹/随机序列长度 | 101 |
| 批次大小(Batchsize) | 256 |
| 编码器学习率 | 0.003 5 |
| 解码器学习率 | 0.005 |
| 生成器学习率 | 0.01 |
| 判别器学习率 | 0.005 |
| 编码器与解码器预训练次数 | 100 |
| 生成器预训练次数 | 50 |
| 最大联合训练次数 | 3 000 |
表3
轨迹关键参数的相似性"
| 轨迹参数 | HD | MAE | ||
|---|---|---|---|---|
| TsGAN模型 | MCS算法 | TsGAN模型 | MCS算法 | |
| 0.213 | 0.227 | 0.013 0 | 0.033 | |
| 0.232 | 0.266 | 0.020 0 | 0.030 | |
| 0.182 | 0.237 | 0.005 8 | 0.011 | |
| 0.175 | 0.212 | 0.008 5 | 0.030 | |
| 0.215 | 0.351 | 0.014 0 | 0.047 | |
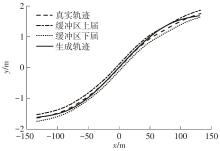
图5
真实变道轨迹缓冲区示例"

表4
变道轨迹频谱的相似性"
| 参数 | Z/% | zl /% | ||
|---|---|---|---|---|
| TsGAN模型 | MCS算法 | TsGAN模型 | MCS算法 | |
| 7.54 | 7.82 | 6.46 | 6.93 | |
| 4.45 | 4.79 | 3.15 | 3.57 | |

图6
变道切入时刻两车的运动关系"


图7
变道切入场景实例点分布的Rispley’s K函数曲线"

表5
所生成场景的轨迹参数区间增长比例"
| 轨迹参数 | 参数区间增长比例/% | 轨迹参数 | 参数区间增长比例/% | ||
|---|---|---|---|---|---|
| 5.72 | 16.80 | ||||
| 23.73 | 3.16 | ||||
| 6.00 | 22.96 | ||||
| 3.57 | 89.79 | ||||
| 6.57 | 29.93 | ||||
| 5.56 | |||||

图8
虚拟测试结果"
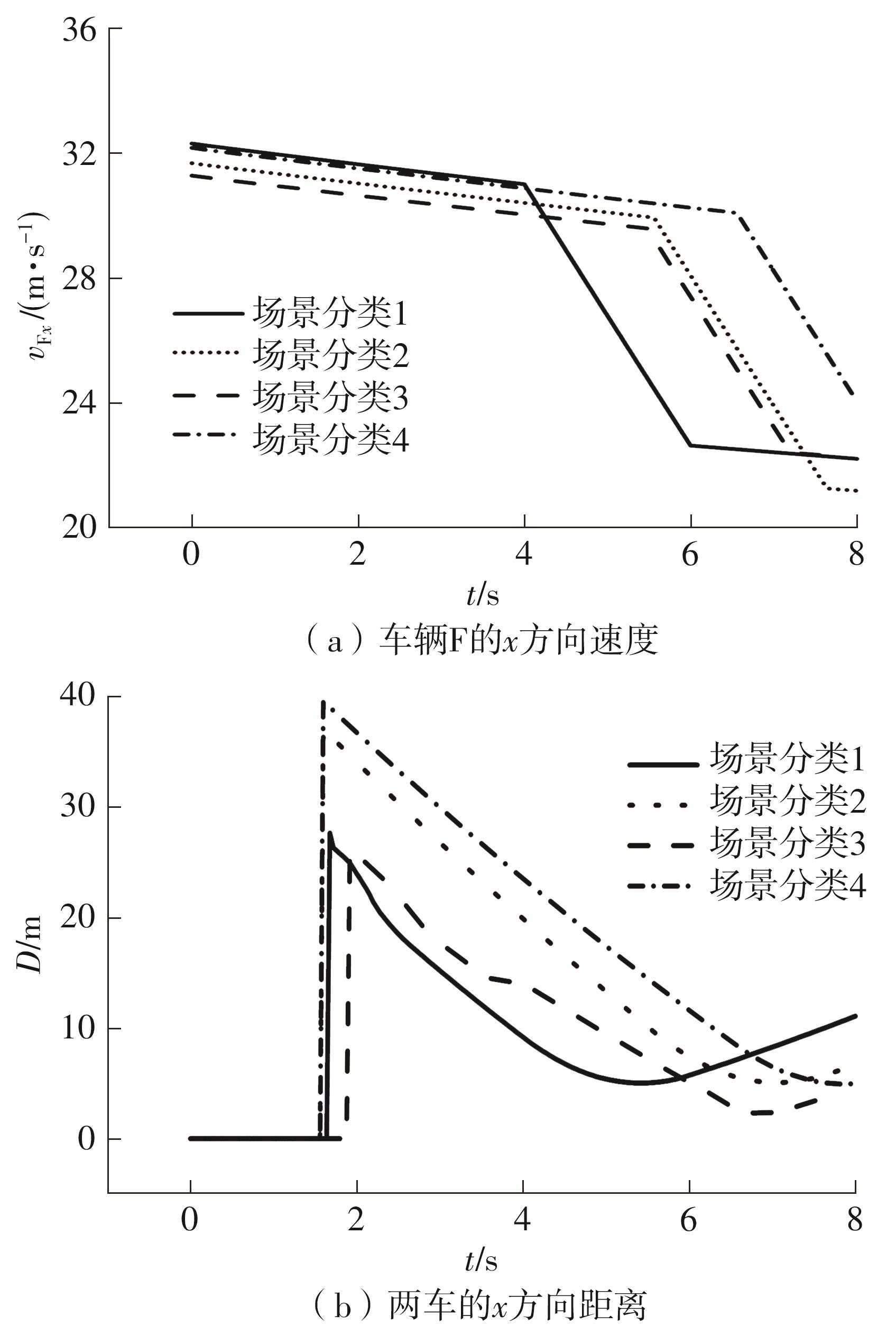

图9
高风险场景实例的虚拟测试过程快照"

| 1 | 王雪松,杨敏明 .基于自然驾驶数据的变道切入行为分析[J].同济大学学报(自然科学版),2018,46(8):1057-1063. |
| WANG Xuesong, YANG Minming .Cut-in behavior analyses based on naturalistic driving data[J].Journal of Tongji University (Natural Science),2018,46(8):1057-1063. | |
| 2 | 王雪松,李艳 .基于自然驾驶数据的驾驶员变道特征分析[J].交通信息与安全,2016,34(1):17-22. |
| WANG Xuesong, LI Yan .Characteristics analysis of lane changing behavior based on the naturalistic driving data[J].Journal of Transport Information and Safety,2016,34(1):17-22. | |
| 3 | 郭柏苍,雒国凤,金立生,等 .面向自动驾驶虚拟测试的变道切入场景库构建方法[J].吉林大学学报(工学版),2023,53(11):3130-3140. |
| GUO Bo-cang, LUO Guo-feng .JIN Li-sheng,et al.Construction method of cut-in scenario library for automatic driving virtual tests[J].Journal of Jilin University (Engineering and Technology Edition),2023,53(11):3130-3140. | |
| 4 | XU D, DING Z, ZHAO H,et al .Naturalistic lane change analysis for human-like trajectory generation[C]∥Proceedings of 2018 IEEE Intelligent Vehicles Symposium.New York:IEEE,2018:1393-1399. |
| 5 | HUANG W, LV Y, CHEN L,et al .Accelerate the autonomous vehicles reliability testing in parallel paradigm[C]∥Proceedings of IEEE 20th International Conference on Intelligent Transportation Systems.Piscataway:IEEE,2017:922-927. |
| 6 | XU Z, JIANG Z, WANG G,et al .When the automated driving system fails:dynamics of public responses to automated vehicles[J].Transportation Research Part C:Emerging Technologies,2021,129(4):103271/1-13. |
| 7 | XU Z, WANG G, ZHAI S,et al .When automation fails:examining the effect of a verbal recovery strategy on user experience in automated driving[J].International Journal of Human-Computer Interaction,2023.Doi:10.1080/10447318.2023.2176986. |
| 8 | GAO Y, ZHAO X, XU Z,et al .An indoor vehicle-in-the-loop simulation platform testing method for autonomous emergency braking[J].Journal of Advanced Transportation,2021,2021:8872889/1-12. |
| 9 | GELDER E, PAARDEKOOPER J .Assessment of automated driving systems using real-life scenarios[C]∥Proceedings of 2017 IEEE Intelligent Vehicles Symposium.Piscataway:IEEE,2017:589-594. |
| 10 | JENKINS I R,GEE L, KNAUSS A,et al .Accident scenario generation with recurrent neural networks[C]∥Proceedings of IEEE 21st International Confe-rence on Intelligent Transportation Systems.Pisca-taway:IEEE,2018:3340-3345. |
| 11 | ZHAO D, LAM H, PENG H,et al .Accelerated evaluation of automated vehicles safety in lane-change scenarios based on importance sampling techniques[J].IEEE Transactions on Intelligent Transportation Systems,2017,18(3):595-607. |
| 12 | ZHAO D, HUANG X, PENG H,et al .Accelerated evaluation of automated vehicles in car-following maneuvers[J].IEEE Transactions on Intelligent Transportation Systems,2018,19(3):733-744. |
| 13 | ZHAO H, WANG C, LIN Y,et al .On-road vehicle trajectory collection and scene-based lane change analysis:Part I[J].IEEE Transactions on Intelligent Trans-portation Systems,2017,18(1):192-205. |
| 14 | GUO Y, KALIDINDI V V, ARIEF M,et al .Modeling multi-vehicle interaction scenarios using Gaussian random field[C]∥Proceedings of IEEE 22th International Conference on Intelligent Transportation Systems.Piscataway:IEEE,2019:3974-3980. |
| 15 | XU Z, WANG Y, WANG G,et al .Trajectory optimization for a connected automated traffic stream: comparison between an exact model and fast heuristics[J].IEEE Transactions on Intelligent Transportation Systems,2021,22(5):2969-2978. |
| 16 | GAO Y, LI J, XU Z,et al .A novel image-based convolutional neural network approach for traffic congestion estimation[J].Expert Systems with Applications,2021,180:115037/1-13. |
| 17 | LI J, XU Z, FU L,et al .Domain adaptation from daytime to nighttime:a situation-sensitive vehicle detection and traffic flow parameter estimation framework[J].Transportation Research Part C:Emerging Technologies,2021,124:102946/1-19. |
| 18 | KRAJEWSKI R, BOCK J, KLOEKER L,et al .The highD dataset:a drone dataset of naturalistic vehicle trajectories on German highways for validation of highly automated driving systems[C]∥Proceedings of IEEE 21st International Conference on Intelligent Transportation Systems.Piscataway:IEEE,2018:2118-2125. |
| 19 | KRAJEWSKI R, MOERS T, BOCK J,et al .The rounD dataset:a drone dataset of road user trajectories at roundabouts in Germany[C]∥Proceedings of IEEE 23rd International Conference on Intelligent Transportation Systems.Piscataway:IEEE,2020:1-6. |
| 20 | BOCK J, KRAJEWSKI R, MOERS T,et al .The inD dataset: a drone dataset of naturalistic road user trajectories at German intersections[C]∥Proceedings of 2020 IEEE Intelligent Vehicles Symposium.Pisca-taway:IEEE,2020:1929-1934. |
| 21 | MOERS T, VATER L, KRAJEWSKI R,et al .The exiD dataset:a real-world trajectory dataset of highly interactive highway scenarios in Germany[C]∥Proceedings of 2022 IEEE Intelligent Vehicles Symposium.Piscataway:IEEE,2022:958-964. |
| 22 | FENG S, FENG Y, YU C,et al .Testing scenario library generation for connected and automated vehicles,Part I:methodology[J].IEEE Transactions on Intelligent Transportation Systems,2021,22(3):1573-1582. |
| 23 | FENG S, FENG Y, SUN H,et al .Testing scenario library generation for connected and automated vehicles,Part II:case studies[J].IEEE Transactions on Inte-lligent Transportation Systems,2021,22(9):5635-5647. |
| 24 | HUANG Z, LAM H, ZHAO D .An accelerated testing approach for automated vehicles with background traffic described by joint distributions[C]∥Proceedings of IEEE 20th International Conference on Intelligent Transportation Systems.Piscataway:IEEE,2017:933-938. |
| 25 | ROCKLAGE E, KRAFT H, KARATAS A,et al .Automated scenario generation for regression testing of autonomous vehicles[C]∥Proceedings of IEEE 20th International Conference on Intelligent Transportation Systems.Piscataway:IEEE,2017:476-483. |
| 26 | YAO W, ZHAO H, DAVOINE F,et al .Learning lane change trajectories from on-road driving data[C]∥Proceedings of 2012 IEEE Intelligent Vehicles Symposium.Piscataway:IEEE,2012:885-890. |
| 27 | XU G, LIU L,OU Y,et al .Dynamic modeling of driver control strategy of lane-change behavior and trajectory planning for collision prediction[J].IEEE Transactions on Intelligent Transportation Systems,2012,13(3):1138-1155. |
| 28 | WANG Z, ZHAO X, XU Z,et al .Modeling and field experiments on autonomous vehicle lane changing with surrounding human-driven vehicles[J].Computer-Aided Civil and Infrastructure Engineering,2021,36(7):877-889. |
| 29 | KRAJEWSKI R, MOERS T, NERGER D,et al .Data-driven maneuver modeling using generative adversarial networks and variational autoencoders for safety validation of highly automated vehicles[C]∥Proceedings of IEEE 21st International Conference on Intelligent Transportation Systems.Piscataway:IEEE,2018:2383-2390. |
| 30 | SCHILDBACH G, BORRELLI F .Scenario model predictive control for lane change assistance on highways[C]∥Proceedings of 2015 IEEE Intelligent Vehicles Symposium.Piscataway:IEEE,2015:611-616. |
| 31 | SHIWAKOTI S, BIKRAM SHAHI S, SINGH P .Deep learning methods for vehicle trajectory predic-tion:a survey[C]∥JOBY P P,ALENCAR M S,FALKOWSKI-GILSKI P.IoT Based Control Networks and Intelligent Systems (Proceedings of 4th ICICNIS 2023).Singapore:Springer,2023:539-554. |
| 32 | 朱宇,赵祥模,徐志刚,等 .基于蒙特卡洛模拟的无人车高速公路变道虚拟测试场景自动生成算法[J].中国公路学报,2022,35(3):89-100. |
| ZHU Yu, ZHAO Xiang-mo, XU Zhi-gang,et al .Automatic generation algorithm of lane-change virtual test scenario on highways for automated vehicles using Monte Carlo simulation[J].China Journal of Highway and Transport,2022,35(3):89-100. | |
| 33 | YOON J, JARRETT D, SCHAAR M V D .Time-series generative adversarial networks[C]∥Proceedings of the 33rd International Conference on Neural Information Processing Systems.Red Hook:Curran Associa-tes Inc,2019:5508-5518. |
| 34 | 胡远志,吕章洁,刘西 .基于PreScan的AEB系统纵向避撞算法及仿真验证[J].汽车安全与节能学报,2017,8(2):136-142. |
| HU Yuan-zhi, LV Zhang-jie, LIU Xi .Algorithm and simulation verification of longitudinal collision avoi-dance for autonomous emergency break (AEB) system based on PreScan[J].Journal of Automotive Safety and Energy,2017,8(2):136-142. | |
| 35 | ZHANG Y, ANTONSSON E, GROTE K .A new threat assessment measure for collision avoidance systems[C]∥Proceedings of IEEE 9th International Conference on Intelligent Transportation Systems.Pisca-taway:IEEE,2006:968-975. |
| 36 | HUANG Z, ZHAO D, LAM H,et al .Evaluation of automated vehicles in the frontal cut-in scenario—an enhanced approach using piecewise mixture models[C]∥Proceedings of 2017 IEEE International Conference on Robotics and Automation.New York:IEEE,2017:197-202. |
| 37 | 朱冰,张培兴,赵健 .面向多维度逻辑场景的自动驾驶安全性聚类评价方法[J].汽车工程,2020,42(11):1458-1463,1505. |
| ZHU Bing, ZHANG Peixing, ZHAO Jian .Clustering evaluation method of autonomous driving safety for multi-dimensional logical scenario[J].Automotive Engineering,2020,42(11):1458-1463,1505. | |
| 38 | 朱西产,张佳瑞,马志雄 .安全切入场景下的驾驶人初始制动时刻分析[J].中国公路学报,2019,32(6):262-273,318. |
| ZHU Xi-chan, ZHANG Jia-rui, MA Zhi-xiong,et al .Analysis of driver initial brake time in safety cut-in scenario[J].China Journal of Highway and Transport,2019,32(6):262-273,318. | |
| 39 | 朱西产,魏昊舟,马志雄 .基于自然驾驶数据的跟车场景潜在风险评估[J].中国公路学报,2020,33(4):169-181. |
| ZHU Xi-chan, WEI Hao-zhou, MA Zhi-xiong .Assessment of the potential risk in car-following scenario based on naturalistic driving data[J].China Journal of Highway and Transport,2020,33(4):169-181. | |
| 40 | MULDER M, ABBINK D A, VAN PAASSEN M M,et al .Design of a haptic gas pedal for active car-following support[J].IEEE Transactions on Intelligent Transportation Systems,2011,12(1):268-279. |
| 41 | 马依宁,姜为,吴靖宇,等 .基于不同风格行驶模型的自动驾驶仿真测试自演绎场景研究[J].中国公路学报,2023,36(2):216-228. |
| MA Yi-ning, JIANG Wei, WU Jing-yu,et al .Self-evolution scenarios for simulation tests of autonomous vehicles based on different models of driving styles[J].China Journal of Highway and Transport,2023,36(2):216-228. | |
| 42 | 卢胜,王正刚,李纯厚 .频谱相似性目标识别算法[J].声学技术,2010,29(1):94-98. |
| LU Sheng, WANG Zheng-gang, LI Chun-hou .An algorithm for object discrimination by spectra similarity[J].Technical Acoustics,2010,29(1):94-98. | |
| 43 | 王结臣,卢敏,苑振宇,等 .基于Ripley’s K函数的南京市ATM网点空间分布模式研究[J].地理科学,2016,36(12):1843-1849. |
| WANG Jiechen, LU Min, YUAN Zhenyu,et al .Point pattern analysis of ATMs distribution based on Ripley’s K-function method in Nanjing City[J].Scientia Geographica Sinica,2016,36(12):1843-1849. | |
| 44 | 葛莹,刘尉,李勇 .Ripley’s K函数方法修正与估计方法比较[J].武汉大学学报(信息科学版),2023,48(6):970-978. |
| GE Ying, LIU Wei, LI Yong .Algorithm modification and estimation comparison of Ripley’s K-function[J].Geomatics and Information Science of Wuhan University,2023,48(6):970-978. |
| [1] | 钟绍鹏, 刘骜, 翟君诺, 等. 共享自动驾驶汽车的多阶城市影响综述[J]. 华南理工大学学报(自然科学版), 2025, 53(6): 104-118. |
| [2] | 苑仁腾, 王晨竹, 项乔君, 等. 轨迹数据驱动的车辆换道意图识别模型[J]. 华南理工大学学报(自然科学版), 2024, 52(6): 34-44. |
| [3] | 曹宁博, 赵利英. 基于最大压强控制的交叉口自动驾驶汽车和行人管理方法[J]. 华南理工大学学报(自然科学版), 2024, 52(2): 124-135. |
| [4] | 张婷, 陈丰, 李璜, 等. 基于驾驶行为的快速路交织区发光标线效果评估[J]. 华南理工大学学报(自然科学版), 2024, 52(11): 106-117. |
| [5] | 蒋盛川, 钟山, 吴荻非, 等. 交通基础设施裂缝病害图像增广方法[J]. 华南理工大学学报(自然科学版), 2024, 52(10): 146-158. |
| [6] | 强睿儒, 赵小强. 基于格拉姆角差场和生成对抗网络的小样本滚动轴承故障诊断方法[J]. 华南理工大学学报(自然科学版), 2024, 52(10): 64-75. |
| [7] | 王琳虹, 李洪涛, 李若楠. 考虑驾驶人视觉搜索能力的雨天公路限速设计[J]. 华南理工大学学报(自然科学版), 2023, 51(6): 20-29. |
| [8] | 马书红, 杨磊, 陈西芳. 风险扩散下城市群多模式交通网络的韧性演化[J]. 华南理工大学学报(自然科学版), 2023, 51(6): 42-51. |
| [9] | 朱铮宇, 罗超, 贺前华, 等. 基于唇重构与三维耦合CNN的多视角音唇一致性判别[J]. 华南理工大学学报(自然科学版), 2023, 51(5): 70-77. |
| [10] | 胡郁葱, 韦湖, 曾强. 基于空间广义有序Probit模型的高速公路事故严重程度分析[J]. 华南理工大学学报(自然科学版), 2023, 51(1): 114-122. |
| [11] | 卢凯, 赵世杰, 吴焕, 等. 饱和交叉口的双向红绿波协调设计数解算法[J]. 华南理工大学学报(自然科学版), 2022, 50(9): 1-11. |
| [12] | 卢凯, 吴蔚, 邓兴栋, 等. 控制子区内协调路径集的构成及优选方法[J]. 华南理工大学学报(自然科学版), 2022, 50(2): 1-14. |
| [13] | 符锌砂, 彭锦辉, 曾彦杰, 等. 面向自动驾驶汽车的交通标线使用状况评估方法[J]. 华南理工大学学报(自然科学版), 2022, 50(11): 1-13. |
| [14] | 马新露, 樊博, 陈诗敖, 等. 基于实时交通流的事故风险评估与分析模型[J]. 华南理工大学学报(自然科学版), 2021, 49(8): 19-25,34. |
| [15] | 陈吉清, 舒孝雄, 兰凤崇, 等. 典型危险事故特征的自动驾驶测试场景构建[J]. 华南理工大学学报(自然科学版), 2021, 49(5): 1-8. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||

