华南理工大学学报(自然科学版) ›› 2024, Vol. 52 ›› Issue (12): 52-64.doi: 10.12141/j.issn.1000-565X.230668
所属专题: 2024年机械工程
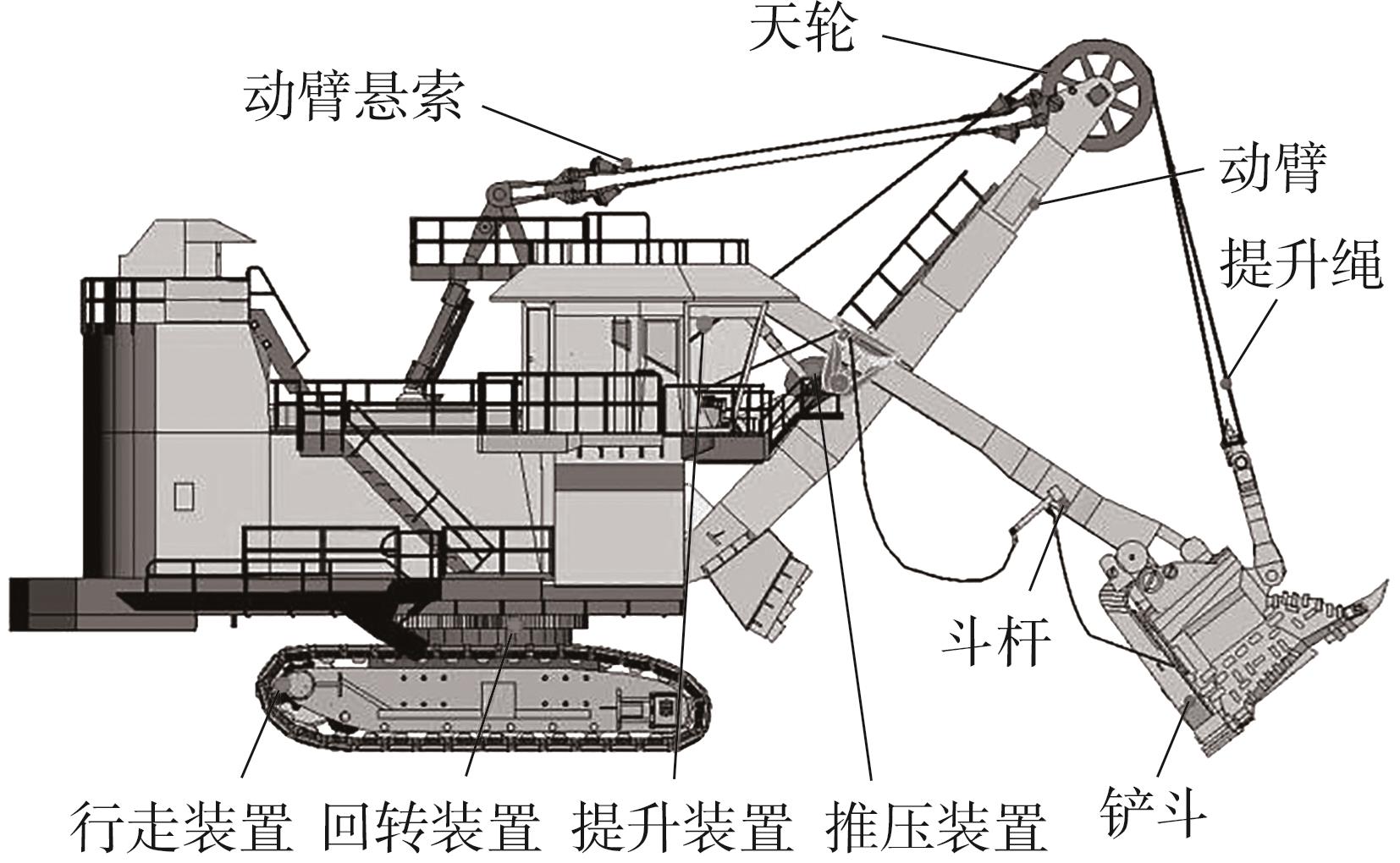
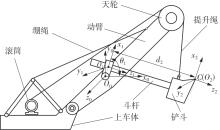
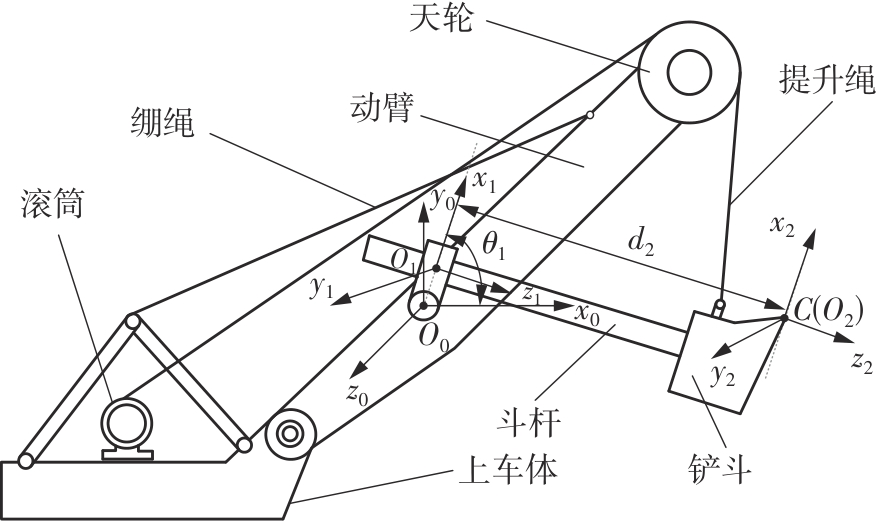
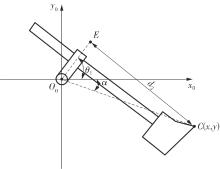
矿用电铲能耗最优的挖掘轨迹规划
王威1,2 张远1,2 史绍宇1,2 沈刚3 杨文庆1,2
- 1.中国矿业大学 机电工程学院,江苏 徐州 221110
2.中国矿业大学 矿山机电设备江苏省重点实验室,江苏 徐州 221116
3.安徽理工大学 机械工程学院,安徽 淮南 232063
Excavation Trajectory Planning with Optimal Energy Consumption for Mining Electric Shovel
WANG Wei1,2 ZHANG Yuan1,2 SHI Shaoyu1,2 SHEN Gang3 YANG Wenqing1,2
- 1.School of Mechanical and Electrical Engineering,China University of Ming and Technology,Xuzhou 221110,Jiangsu,China
2.Jiangsu Key Laboratory of Mine Mechanical and Electrical Equipment,China University of Mining and Technology,Xuzhou 221116,Jiangsu,China
3.School of Mechanical Engineering,Anhui University of Science and Technology,Huainan 232063,Anhui,China
摘要:
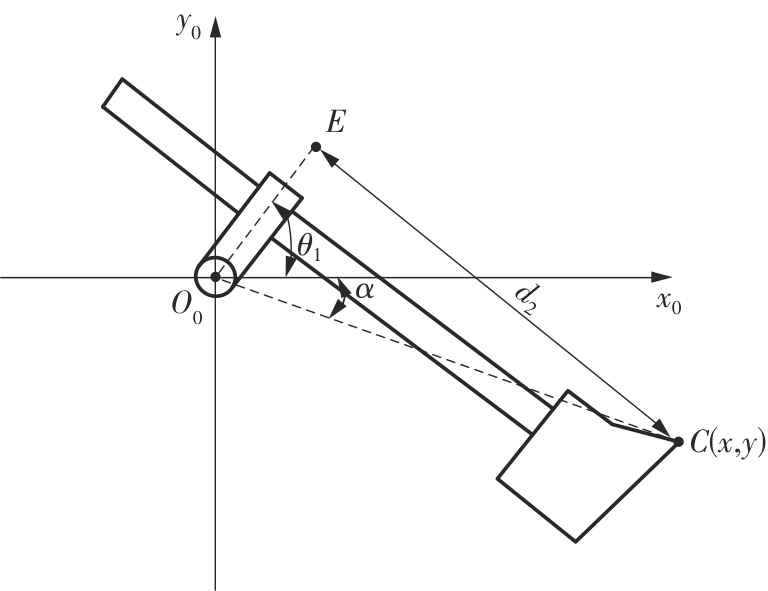
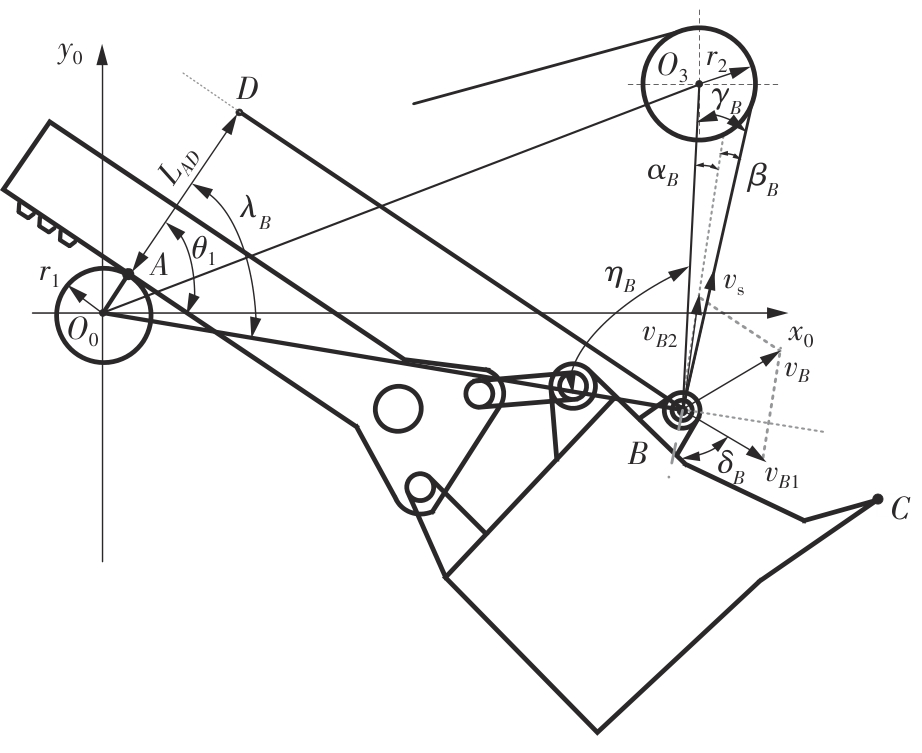
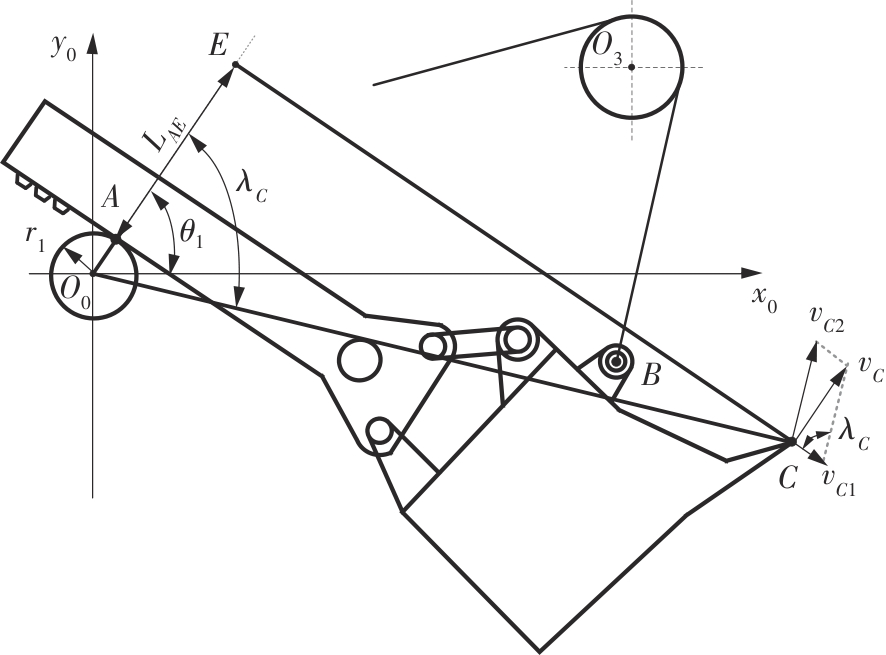
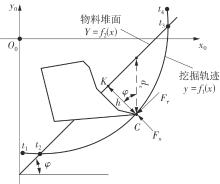
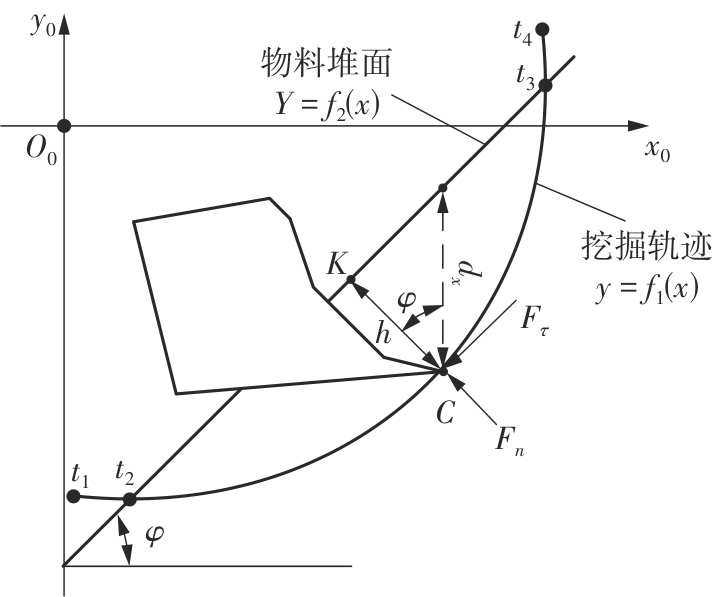
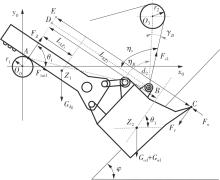
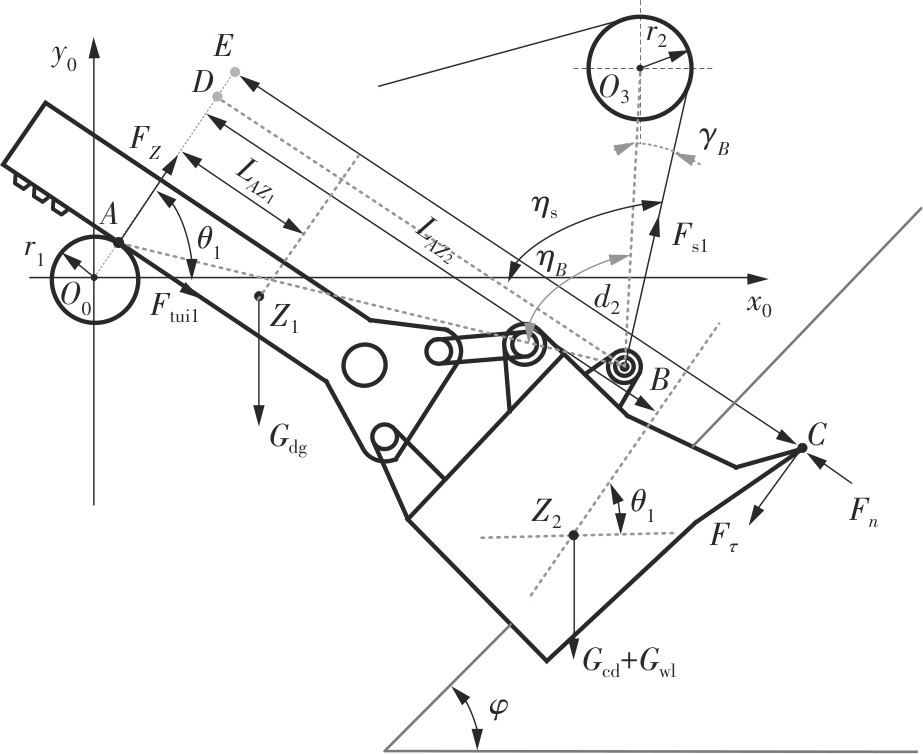
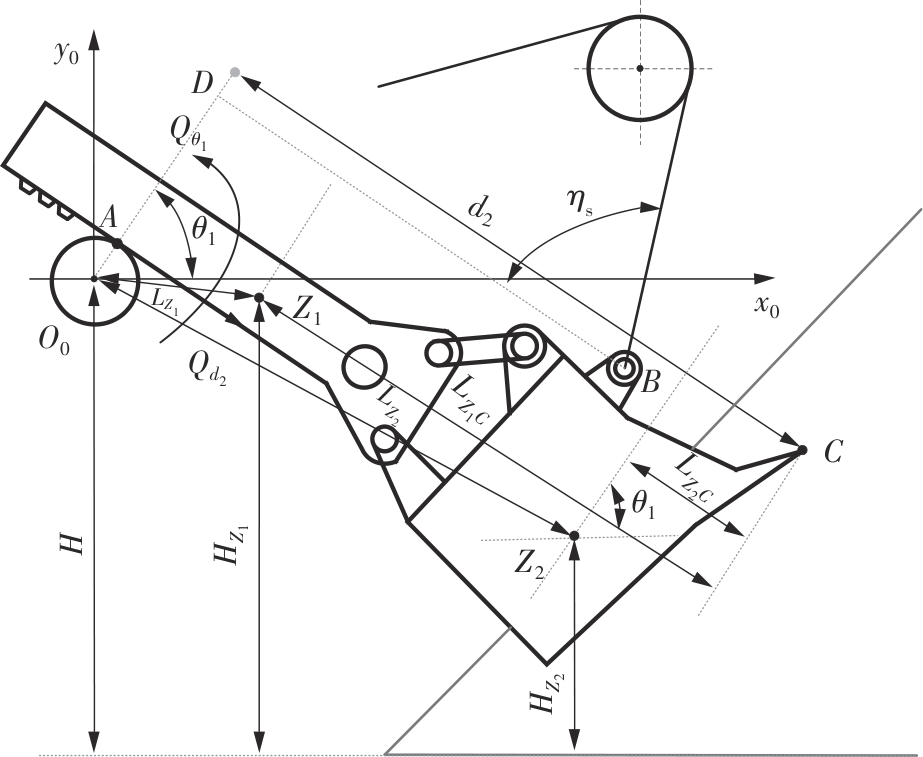
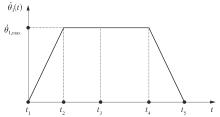
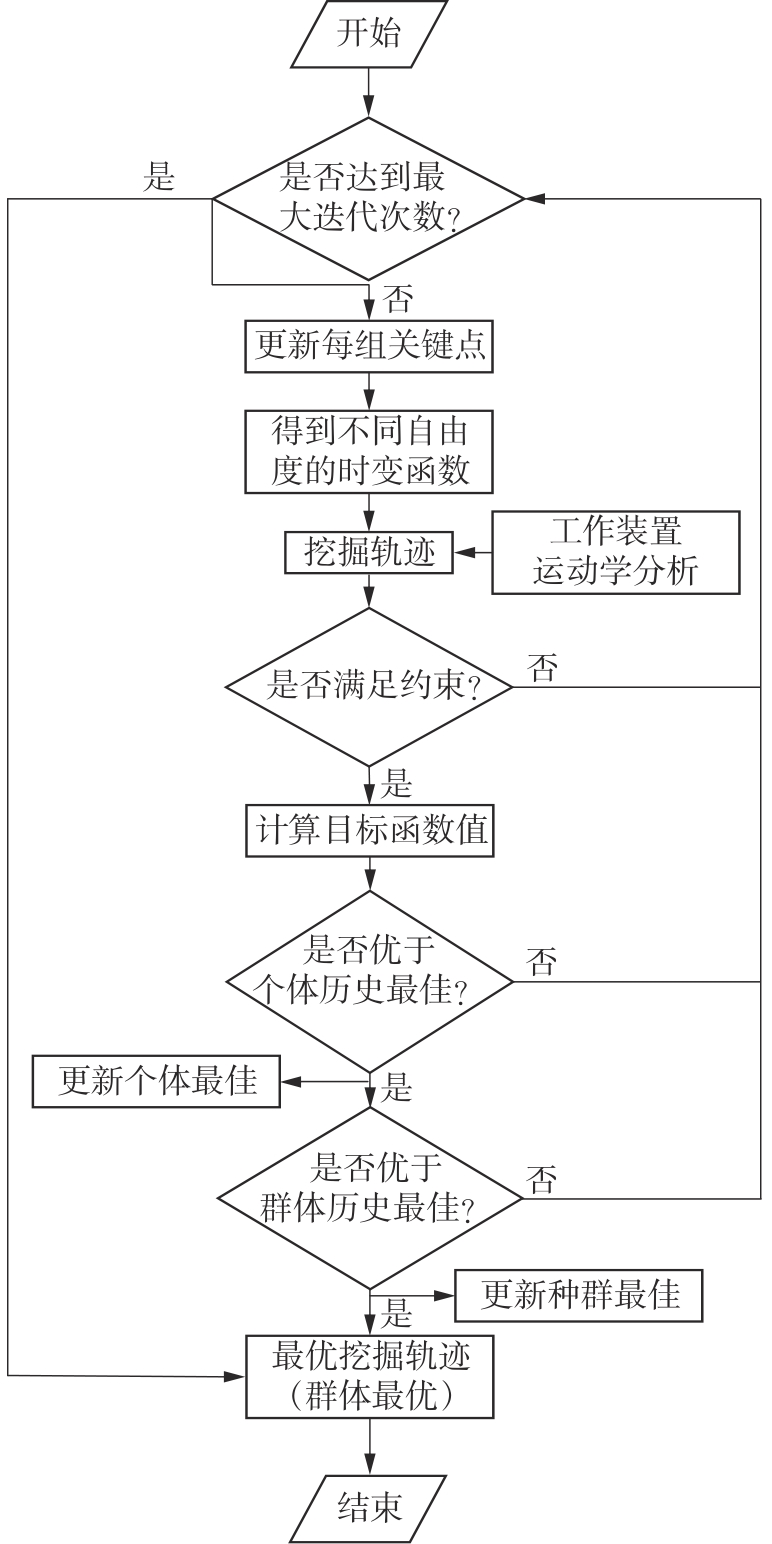
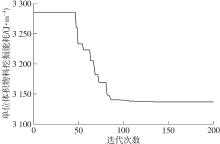
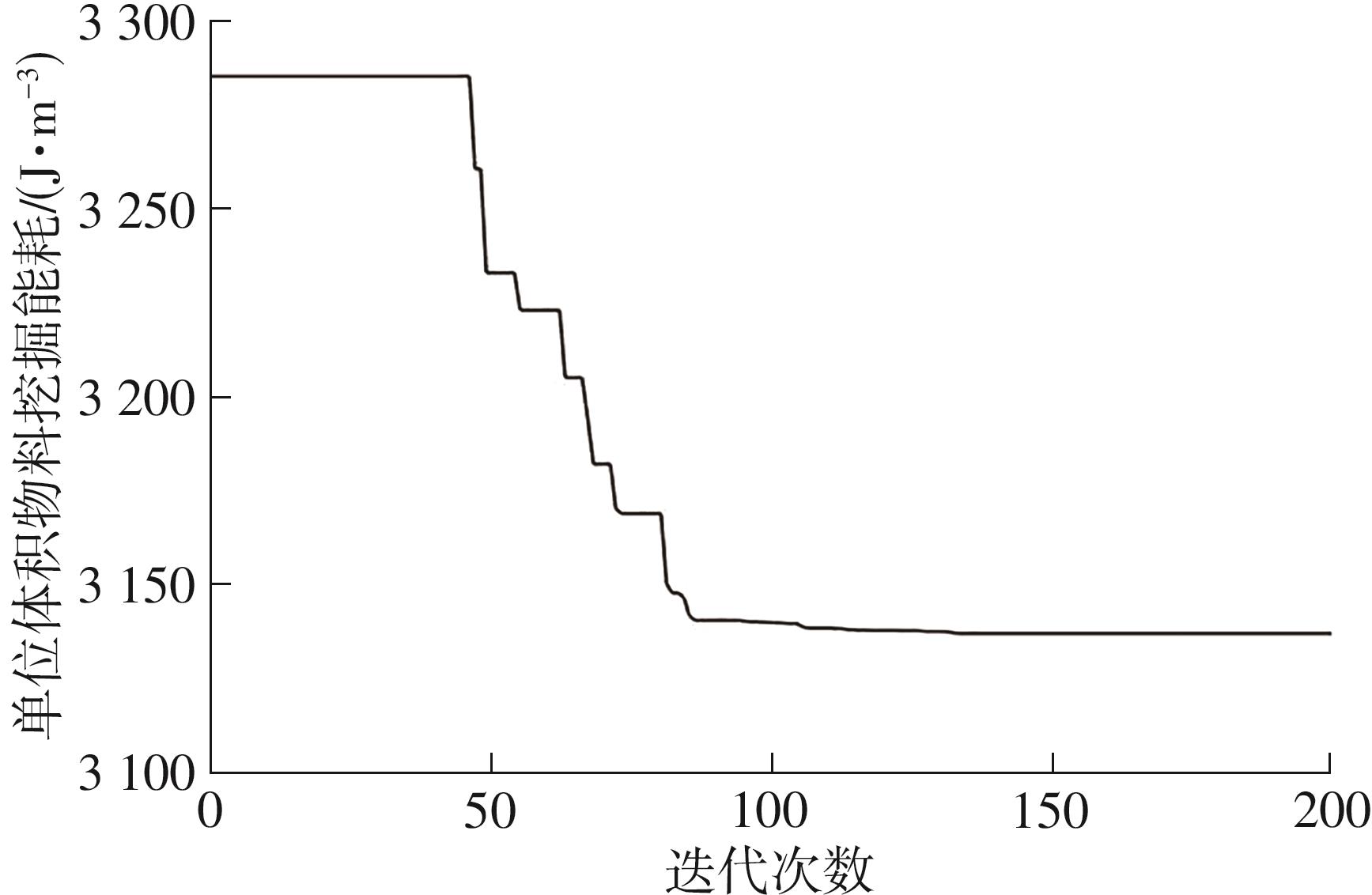
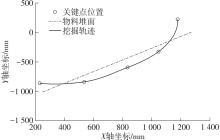
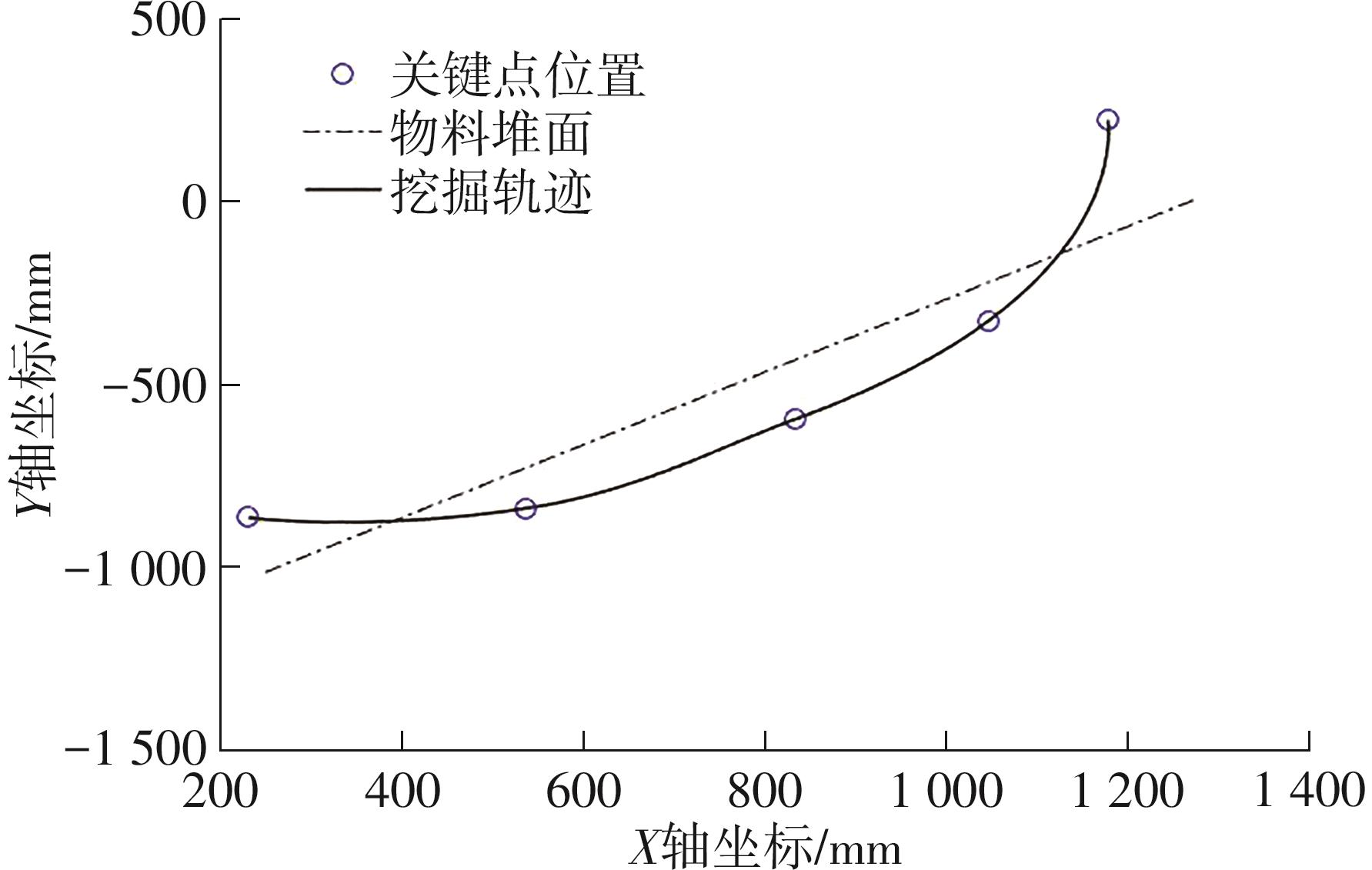
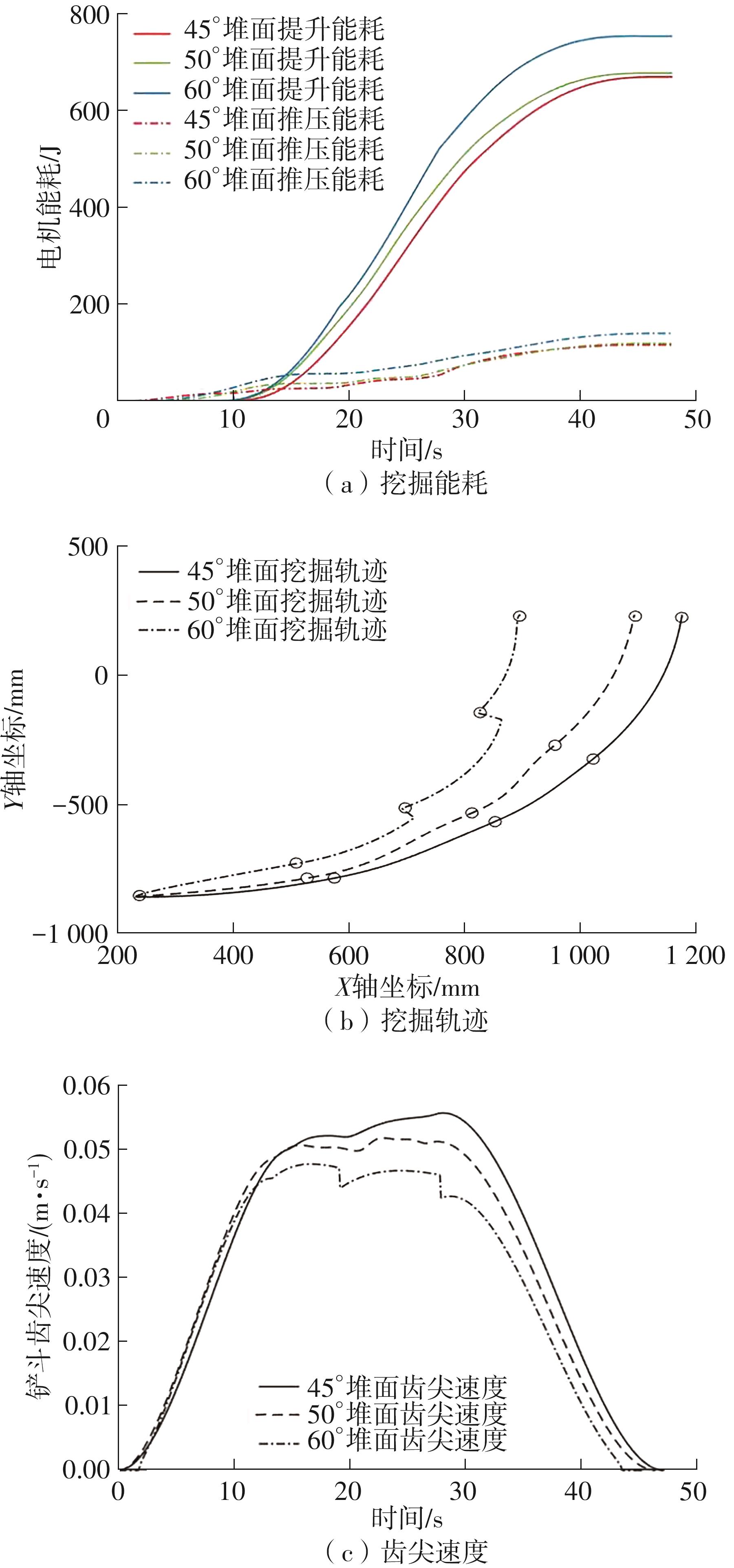
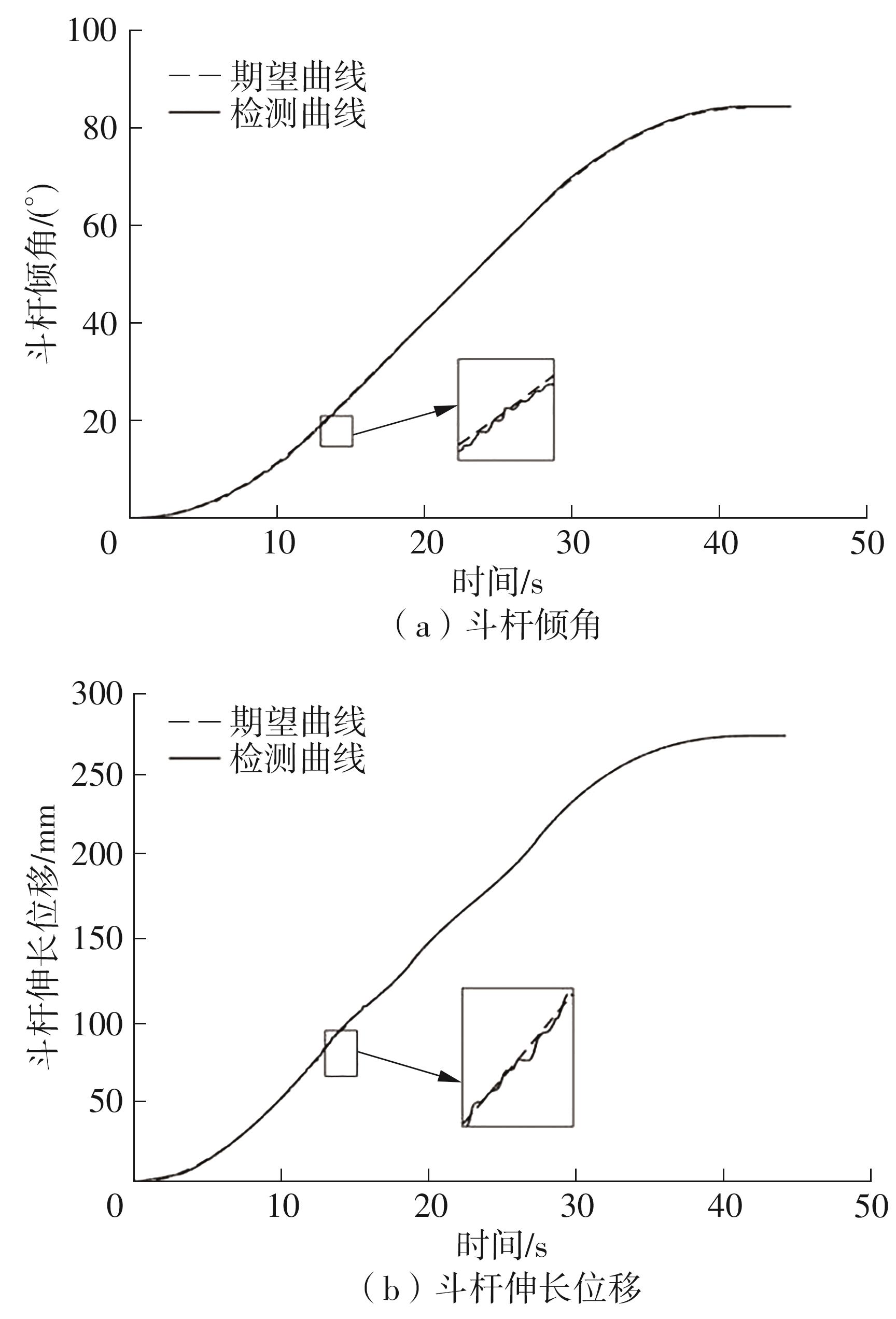
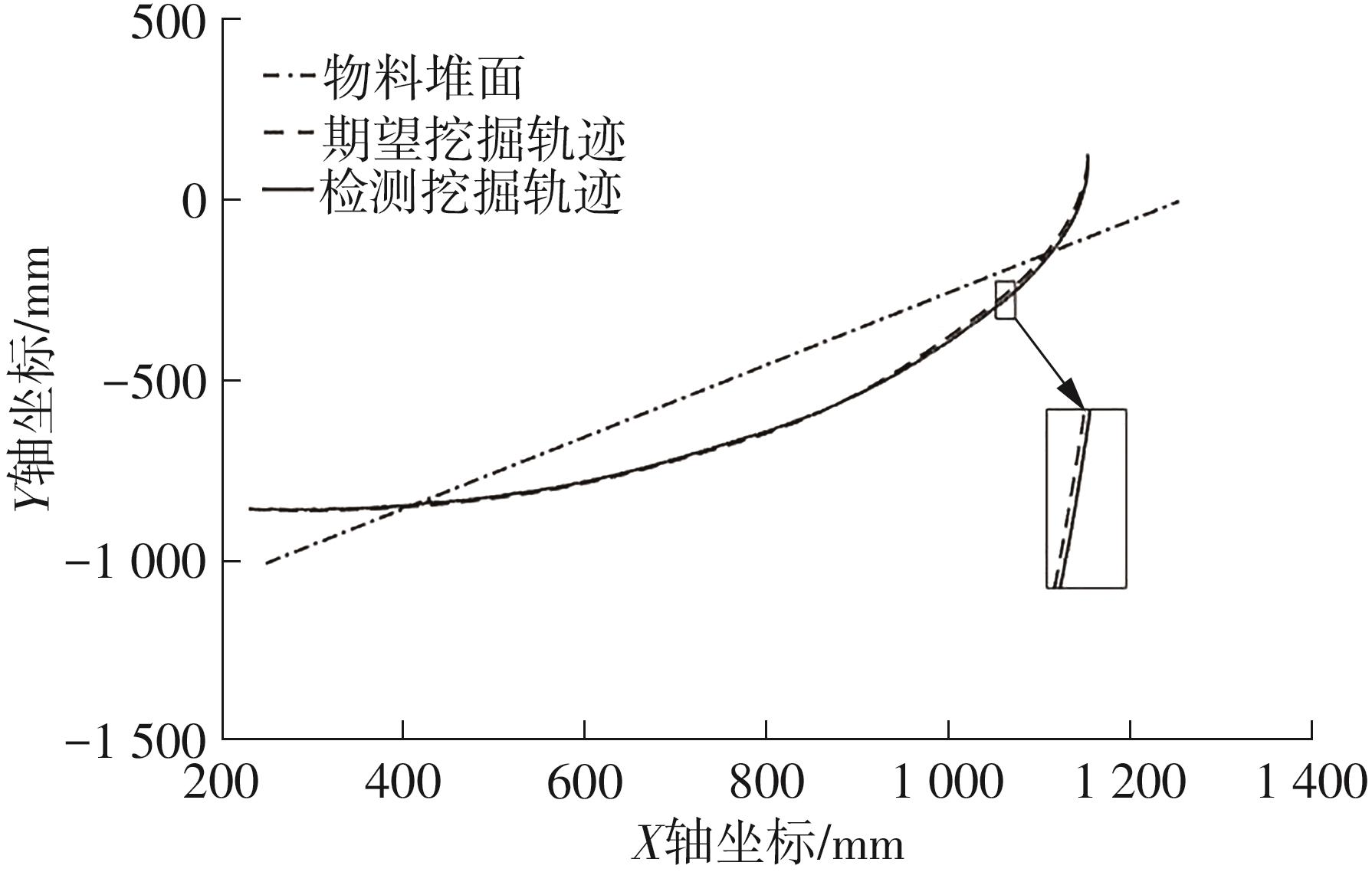
采装作业是露天煤矿开采过程的中心环节,其能耗占露天煤矿总开采能耗的大半,决定了开采效率与设备能耗。传统露天煤矿采装作业由人工操作矿用电铲完成,存在挖掘满斗率低、能耗高等问题。为进一步降低能耗,该文着眼于矿用电铲的无人化和智能化发展趋势,对矿用电铲的最优挖掘轨迹进行研究。首先,对矿用电铲工作装置进行了运动学分析,通过运动学正反解揭示装置位姿空间和关节空间的关系。其次,对矿用电铲工作装置进行了动力学分析,基于挖掘过程中装置的静力学分析以及对动态挖掘阻力、物料重力的分析,构建了工作装置的拉格朗日动力学方程。然后,基于粒子群优化算法,结合轨迹规划的优化设计模型,得到单位体积物料挖掘能耗最优的矿用电铲挖掘轨迹,分析了物料堆面特性、运行参数、拟合函数对电铲工作装置能耗以及运行稳定性的影响,并提出了兼顾节能与稳定的挖掘轨迹规划策略。最后,开展了矿用电铲最优挖掘轨迹规划的实验研究。结果表明,所提出的单位体积物料挖掘能耗最优的轨迹规划方法能够兼顾矿用电铲挖掘的高效性和节能性。
中图分类号: