华南理工大学学报(自然科学版) ›› 2023, Vol. 51 ›› Issue (6): 52-61.doi: 10.12141/j.issn.1000-565X.220535
所属专题: 2023年交通运输工程
基于粒子群优化的主动稳定杆系统自抗扰控制
赵强1 刘传卫1 张娜2 朱宝全1 谢春丽1
- 1.东北林业大学 机电工程学院,黑龙江 哈尔滨 150040
2.黑龙江科技大学 电气与控制工程学院,黑龙江 哈尔滨 150022
Active Disturbance Rejection Control of Active Stabilizer System Based on Particle Swarm Optimization
ZHAO Qiang1 LIU Chuanwei1 ZHANG Na2 ZHU Baoquan1 XIE Chunli1
- 1.College of Mechanical and Electrical Engineering,Northeast Forestry University,Harbin 150040,Heilongjiang,China
2.School of Electrical and Control Engineering,Heilongjiang University of Science and Technology,Harbin 150022,Heilongjiang,China
摘要:
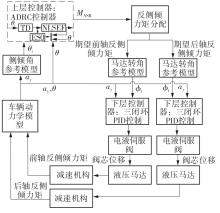
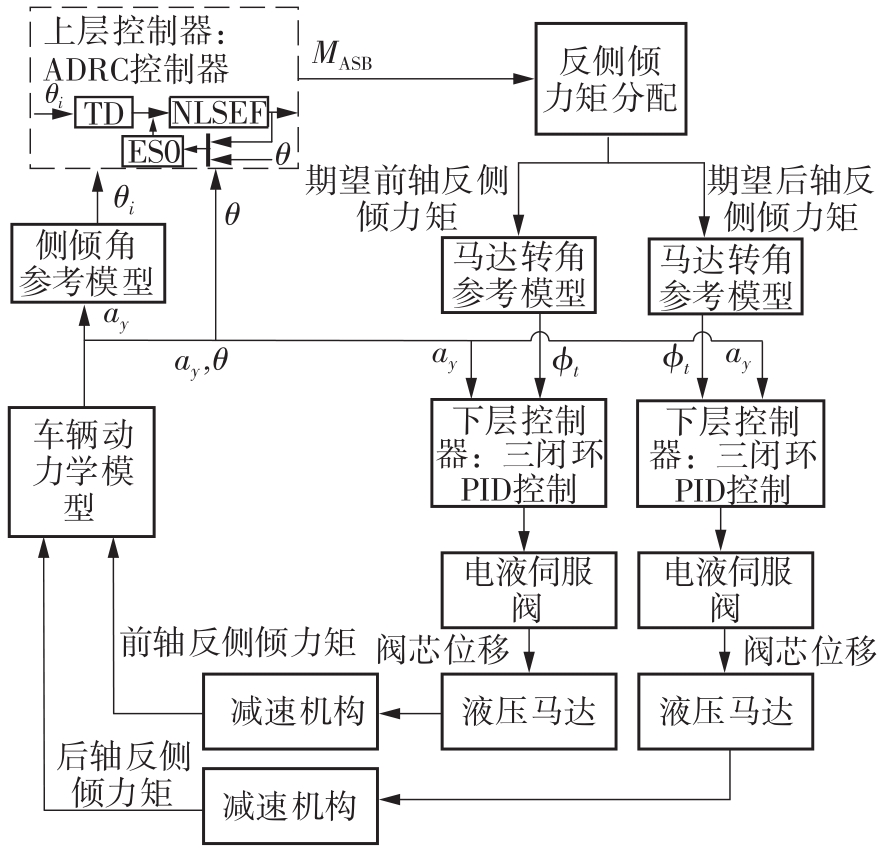
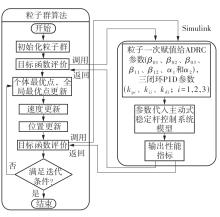
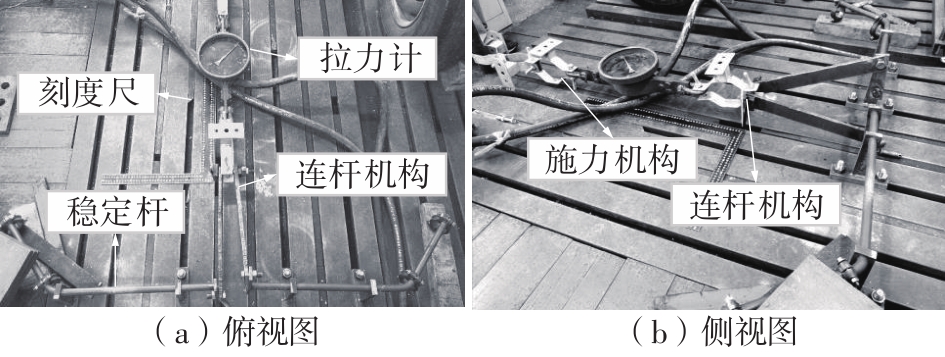
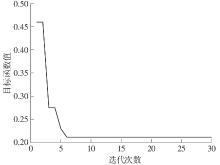
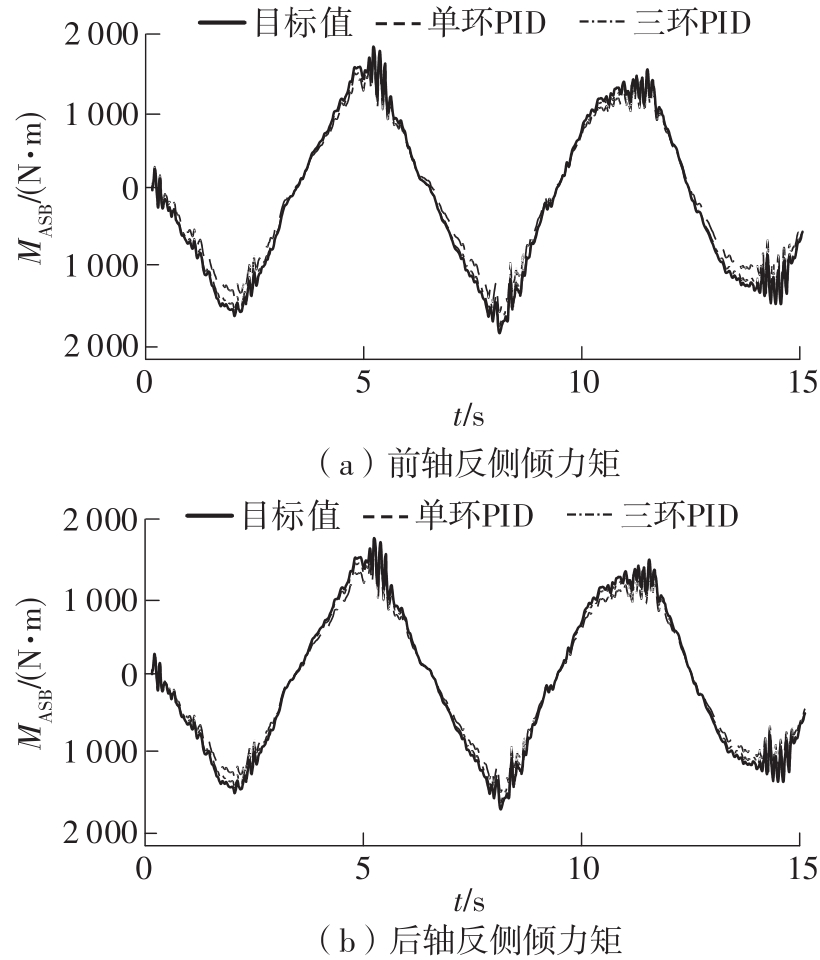
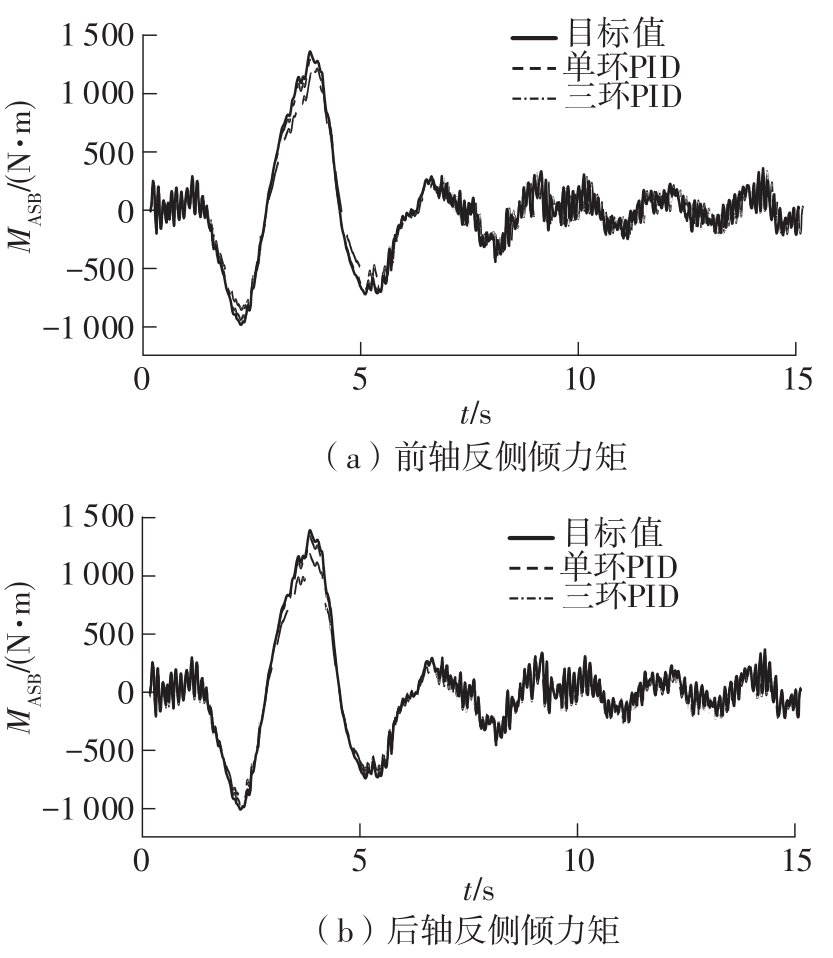
为了提高车辆的抗侧倾能力,设计了液压马达驱动式主动稳定杆控制系统,提出了基于粒子群优化(PSO)算法的分层控制策略。上层自抗扰控制器(ADRC)计算出整车所需反侧倾力矩,整车所需要的反侧倾力矩经过分配器分配到前后轴,下层三闭环比例-积分-微分控制器(PID)接收到所要提供的反侧倾力矩后计算出控制电流输入到伺服阀,从而驱动马达输出轴旋转并通过稳定杆产生主动力矩,实现车辆的主动防侧倾控制。为了使控制器有更好的控制效果,采用PSO算法整体优化上、下层控制,优化后的ADRC和PID参数再输入到整车模型中,为了使仿真接近实际效果,把实验测得的横向稳定杆扭转刚度也代入到模型中。在C级路面上采用蛇形和双移线工况进行仿真,通过将PSO优化的自抗扰系统与被动系统、PID控制系统和未优化的自抗扰控制系统对比进行仿真验证。仿真数据表明:侧倾角的大小直接影响车辆侧倾稳定性,采用PSO算法优化的分层控制策略能显著降低车辆的侧倾角,有效抑制过度的车身侧倾运动带来的不稳定性;主动控制的稳定杆比传统被动式稳定杆能更好地给车辆提供所需要的反侧倾力矩,提高了车辆抗侧倾能力;优化后的ADRC控制器比被动系统和未优化的ADRC控制器有更好的主动控制效果,相同工况下侧倾角更小,抗侧倾能力更强,优化后的三闭环PID响应速度更快,有更佳的跟随性能。
中图分类号: