| 1 |
何永明,裴玉龙 .超高速公路发展可行性论证与必要性研究[J].公路,2016,61(1):158-162.
|
|
HE Yong-ming, PEI Yu-long .Feasibility demonstration and necessity analysis on superhighway[J].Highway,2016,61(1):158-162.
|
| 2 |
National Highway Traffic Safety Administration .Traffic safety facts 2020:a compilation of motor vehicle crash data from the fatality analysis reporting system and the general estimates system[Z].Washington:US Department of Transportation,2020.
|
| 3 |
陆建,李英帅 .车辆换道行为建模的回顾与展望[J].交通运输系统工程与信息,2017,17(4):48-55.
|
|
LU Jian, LI Ying-shuai .Review and outlook of modeling of lane changing behavior[J].Journal of Transportation Systems Engineering and Information Technology,2017,17(4):48-55.
|
| 4 |
何永明,裴玉龙 .基于出行费用的超高速公路经济性评价[J].公路,2018,63(1):117-123.
|
|
HE Yong-ming, PEI Yu-long .Economic evaluation of superhighways based on travel cost[J].Highway,2018,63(1):117-123.
|
| 5 |
HE Y, KANG J, PEI Y,et al .Research on influencing factors of fuel consumption on superhighway based on DEMATEL-ISM model[J].Energy Policy,2021,158:112545/1-10.
|
| 6 |
何永明,冯佳,权聪,等 .基于联合仿真的超高速公路车辆制动避撞系统[J].华南理工大学学报(自然科学版),2022,50(10):19-28.
|
|
HE Yongming, FENG Jia, QUAN Cong,et al .Braking collision avoidance system for vehicles driving on superhighway based on co-simulation[J].Journal of South China University of Technology (Natural Science Edition),2022,50(10):19-28.
|
| 7 |
何永明,权聪,魏堃,等 .超高速公路车路协同路侧单元感知融合方法研究[J].吉林大学学报(工学版),(2023-01-18).Doi:10.13229/i.cnkijidxbaxb20221225 .
|
|
HE Yongming, QUAN Cong, WEI Kun,et al .Research on the perception fusion method of roadside units for vehicle road collaboration on superhighways[J].Journal of Jilin University (Engineering Edition),(2023-01-18).Doi:10.13229/i.cnkijidxbaxb 20221225 .
|
| 8 |
ZUO Z, YANG X, LI Z,et al .MPC-based cooperative control strategy of path planning and trajectory tracking for intelligent vehicles[J].IEEE Transactions on Intelligent Vehicles,2021,6(3):513-522.
|
| 9 |
孙秦豫,付锐,王畅,等 .人机协作系统中车辆轨迹规划与轨迹跟踪控制研究[J].中国公路学报,2021,34(9):146-160.
|
|
SUN Qin-yu, FU Rui, WANG Chang,et al .Vehicle trajectory-planning and trajectory-tracking control in human-autonomous collaboration system[J].China Journal of Highway and Transport,2021,34(9):146-160.
|
| 10 |
赵奉奎,葛振,董锋威,等 .基于改进人工势场法的智能汽车轨迹规划算法研究[J].重庆交通大学学报(自然科学版),2022,41(11):153-160.
|
|
ZHAO Fengkui, GE Zhen, DONG Fengwei,et al .Intelligent vehicle trajectory planning algorithm based on improved artificial potential field method[J].Journal of Chongqing Jiaotong University (Natural Science),2022,41(11):153-160.
|
| 11 |
胡杰,张志豪,陈瑞楠,等 .基于改进混合A*的智能汽车时空联合规划方法[J].汽车工程,2023,45(7):1123-1133.
|
|
HU Jie, ZHANG Zhihao, CHEN Ruinan,et al .Spatio-temporal joint planning method for intelligent vehicles based on improved hybrid A*[J].Automotive Engineering,2023,45(7):1123-1133.
|
| 12 |
高锋,冯德福,胡秋霞 .面向NMPC运动规划系统的数值优化加速技术[J].汽车工程,2023,45(8):1438-1447,1497.
|
|
GAO Feng, FENG Defu, HU Qiuxia .Accelerating technologies of numerical optimization for motion planning designed by nonlinear model predictive control [J].Automotive Engineering,2023,45(8):1438-1447,1497.
|
| 13 |
ZHOU J, ZHENG H, WANG J,et al .Multiobjective optimization of lane-changing strategy for intelligent vehicles in complex driving environments[J].IEEE Transactions on Vehicular Technology,2020,69(2):1291-1308.
|
| 14 |
YANG D, ZHENG S, WEN C,et al .A dynamic lane-changing trajectory planning model for automated vehicles[J].Transportation Research Part C:Emerging Technologies,2018,95:228-247.
|
| 15 |
牛国臣,李文帅,魏洪旭 .基于双五次多项式的智能汽车换道轨迹规划[J].汽车工程,2021,43(7):978-986,1004.
|
|
NIU Guochen, LI Wenshuai, WEI Hongxu .Intelligent vehicle lane changing trajectory planning based on double quintic polynomials[J].Automotive Engineering,2021,43(7):978-986,1004.
|
| 16 |
宋洁,张小俊,张云龙 .智能汽车换道避障路径规划与跟踪控制[J].现代制造工程,2022(10):43-50,20.
|
|
SONG Jie, ZHANG Xiaojun, ZHANG Yunlong .Path planning and tracking control for intelligent vehicles changing lanes to avoid obstacles[J].Modern Manufacturing Engineering,2022(10):43-50,20.
|
| 17 |
黄晶,蓟仲勋,彭晓燕,等 .考虑驾驶人风格的换道轨迹规划与控制[J].中国公路学报,2019,32(6):226-239,247.
|
|
HUANG Jing, JI Zhongxun, PENG Xiaoyan,et al .Lane changing trajectory planning and control considering driver style[J].China Journal of Highway and Transport,2019,32(6):226-239,247.
|
| 18 |
何永明,裴玉龙 .超高速公路设计及运行特性研究[M].北京:科学出版社,2020.
|
| 19 |
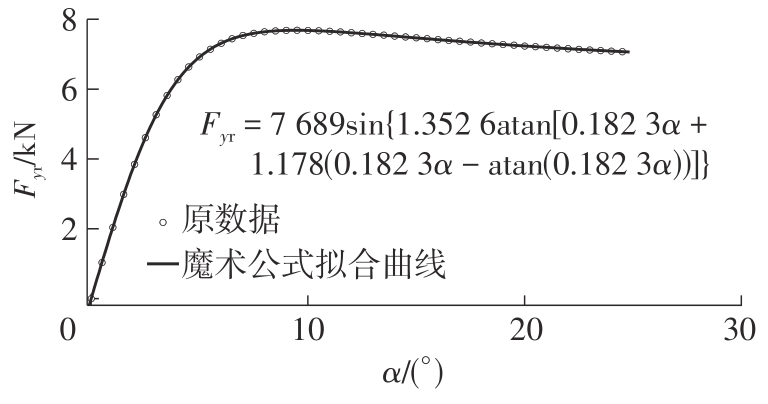
PACEJKA H .Tire and vehicle dynamics[M].2nd ed.New York:Elsevier,2006:101-117.
|
| 20 |
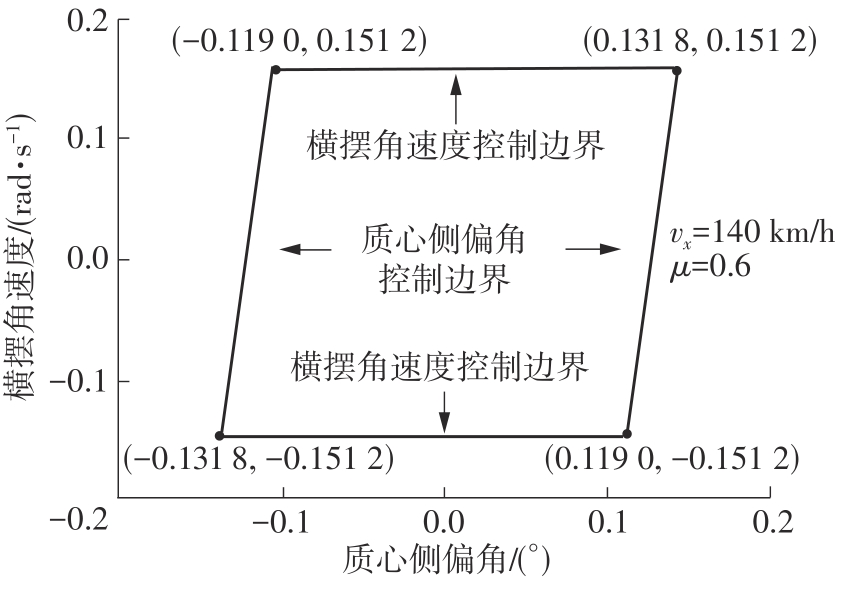
BEAL C E, GERDES J C .Model predictive control for vehicle stabilization at the limits of handling[J].IEEE Transactions on Control Systems Technology,2013,21(4):1258-1269.
|
| 21 |
ERLIEN S M, FUJITA S, GERDES J C .Shared steering control using safe envelopes for obstacle avoidance and vehicle stability[J].IEEE Transactions on Intelligent Transportation Systems,2016,17(2):441-451.
|