华南理工大学学报(自然科学版) ›› 2024, Vol. 52 ›› Issue (2): 124-135.doi: 10.12141/j.issn.1000-565X.220489
基于最大压强控制的交叉口自动驾驶汽车和行人管理方法
曹宁博1 赵利英2
- 1.长安大学 运输工程学院,陕西 西安 710061
2.西安理工大学 经济与管理学院,陕西 西安 710048
Management Method of Autonomous Vehicles and Pedestrians at Intersections Based on Maximum Pressure Controls
CAO Ningbo1 ZHAO Liying2
- 1.School of Transportation Engineering,Chang’an University,Xi’an 710061,Shaanxi,China
2.School of Economics and Management,Xi’an University of Technology,Xi’an 710048,Shaanxi,China
摘要:
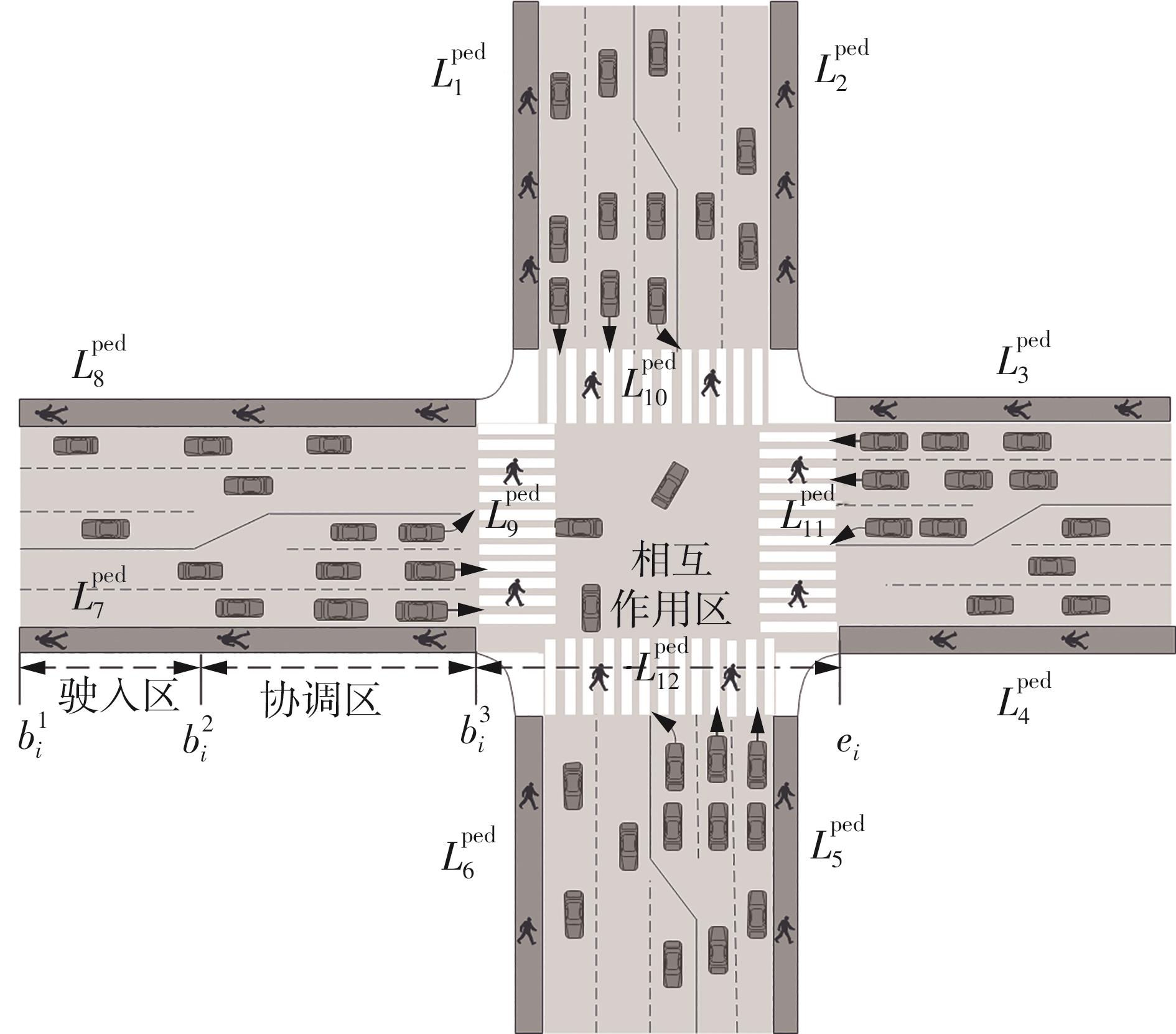
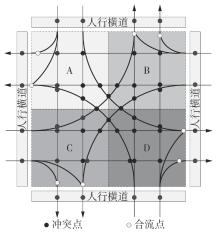
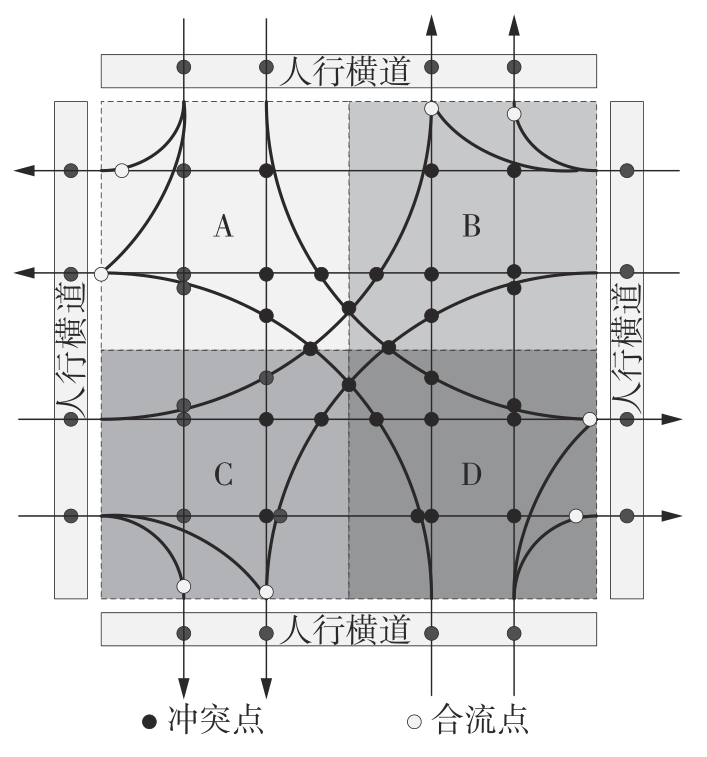
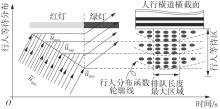
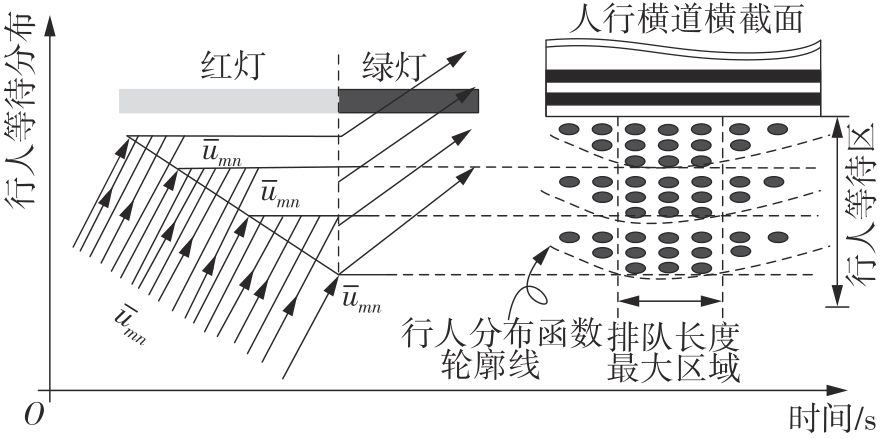
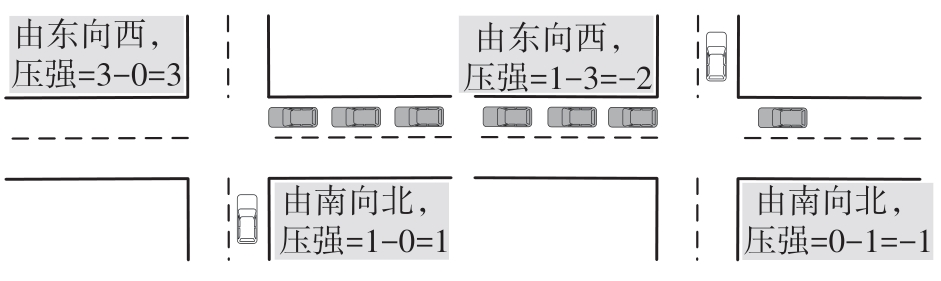
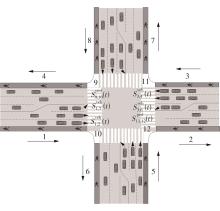
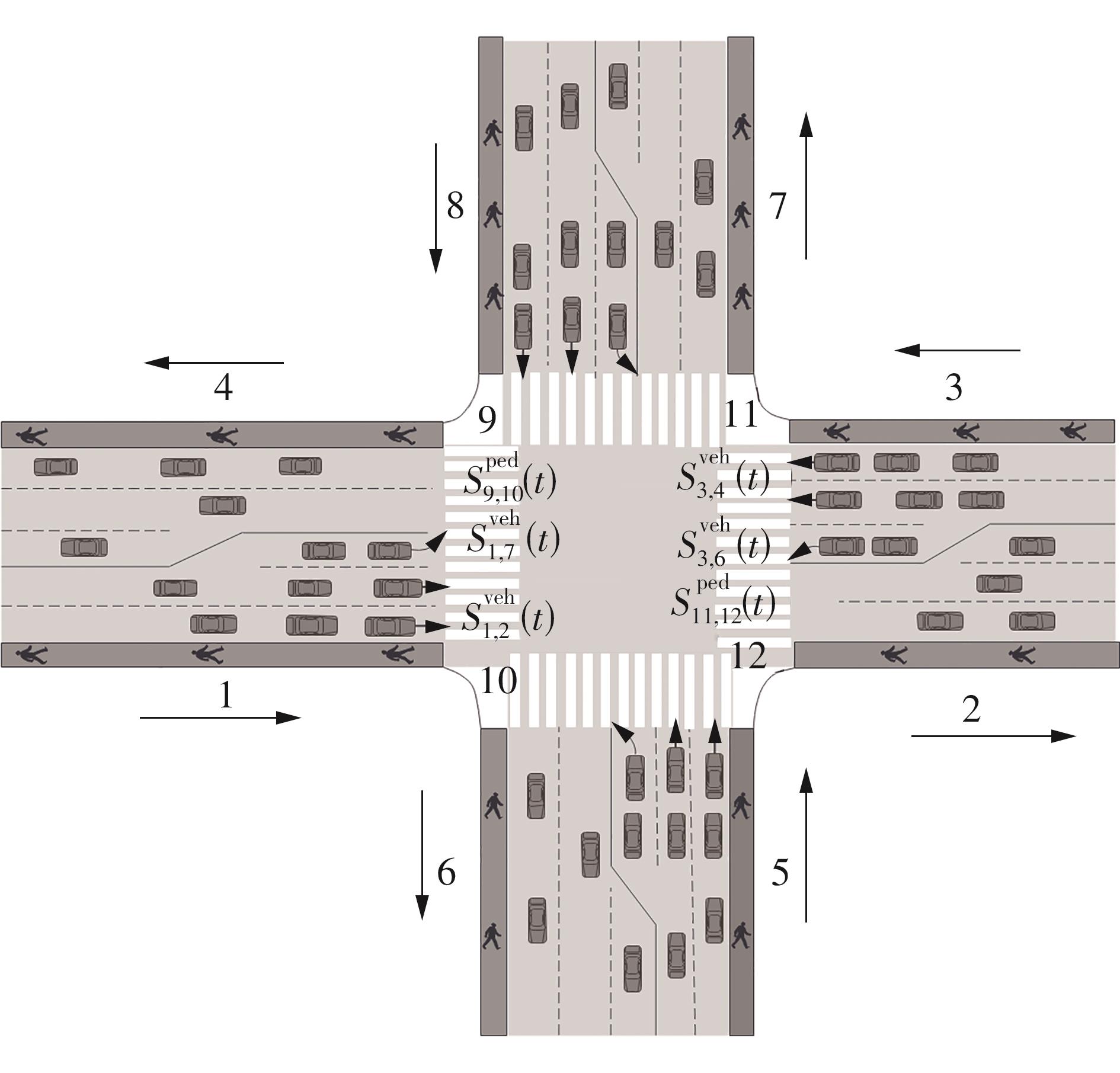
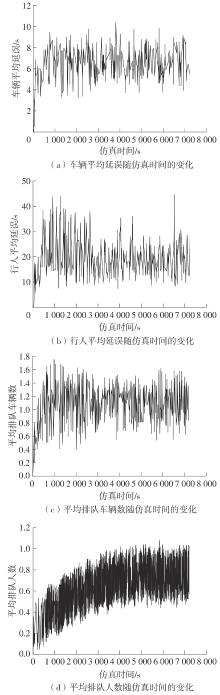
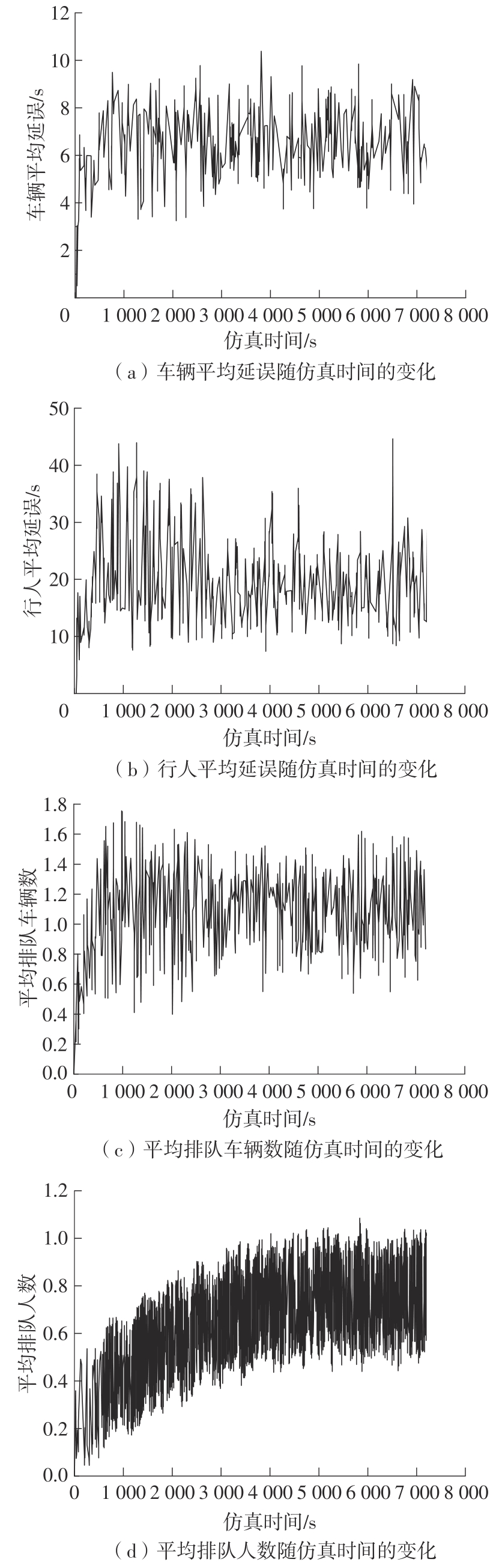
为提高交叉口自动驾驶汽车和行人的管理水平,进而改善交通流的运行效率和稳定性,文中基于最大压强控制和自动驾驶汽车轨迹规划方法构建了交叉口自动驾驶汽车和行人管理方法。首先,综合考虑行人到达率、人行横道尺寸、等待时间和行人到达分布规律等对行人的影响,利用概率分布函数对行人排队长度进行建模,并利用估计的行人排队长度,基于最大压强控制方法构建了交叉口自动驾驶汽车和行人排队长度管理方法;然后,为帮助交叉口内部自动驾驶汽车避免碰撞并获取最佳运动轨迹,结合最大压强控制方法与已有交叉口自动驾驶汽车轨迹规划方法,在控制交叉口自动驾驶汽车和行人排队长度的基础上,同时对自动驾驶汽车轨迹进行规划;最后,利用Python联合SUMO开源交通仿真软件对模型进行验证,仿真持续2 h。仿真结果表明,在不同自动驾驶汽车和行人需求条件下,该自动驾驶汽车和行人管理方法的加入不仅能够实现对自动驾驶汽车运动轨迹的规划控制,而且能够迅速稳定和降低它们的延误与排队长度,并能改善交叉口运行效率。
中图分类号: