华南理工大学学报(自然科学版) ›› 2026, Vol. 54 ›› Issue (1): 104-114.doi: 10.12141/j.issn.1000-565X.250060
基于模糊算法的三柔性梁耦合系统振动控制
邱志成, 李猛, 李旻
- 华南理工大学 机械与汽车工程学院,广东 广州 510640
Vibration Control of Three-Flexible Beam Coupling System Based on Fuzzy Algorithm
QIU Zhicheng, LI Meng, LI Min
- School of Mechanical and Automotive Engineering,South China University of Technology,Guangzhou 510640,Guangdong,China
摘要:
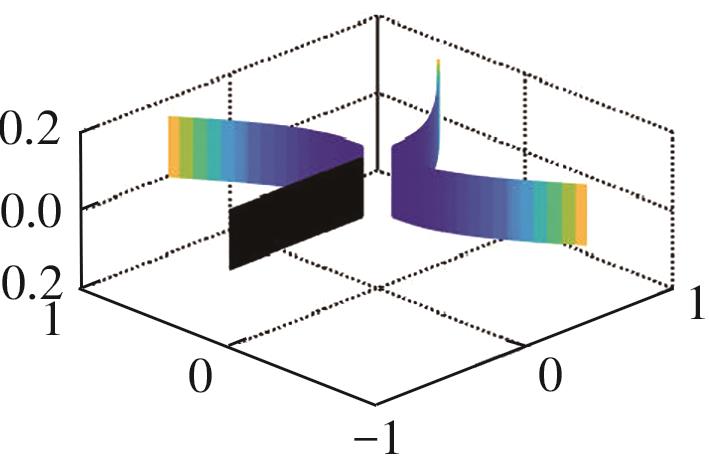
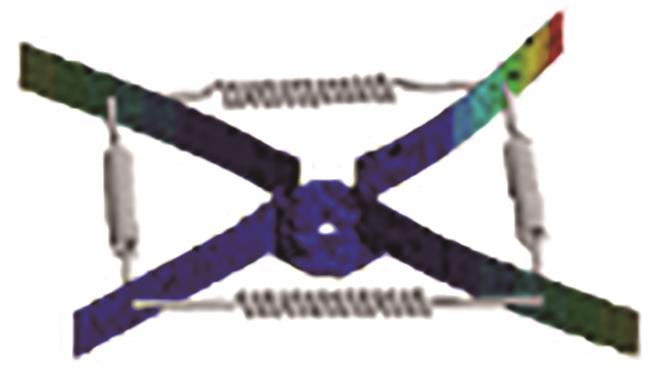
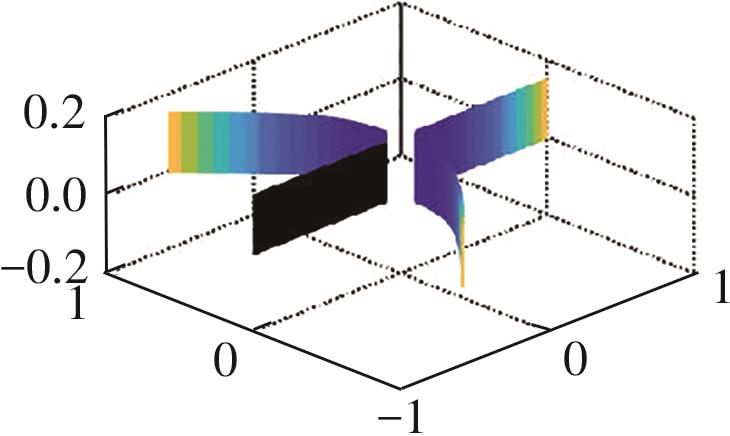
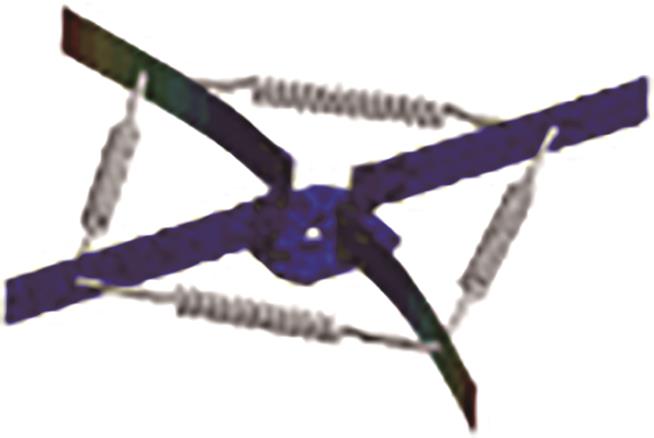
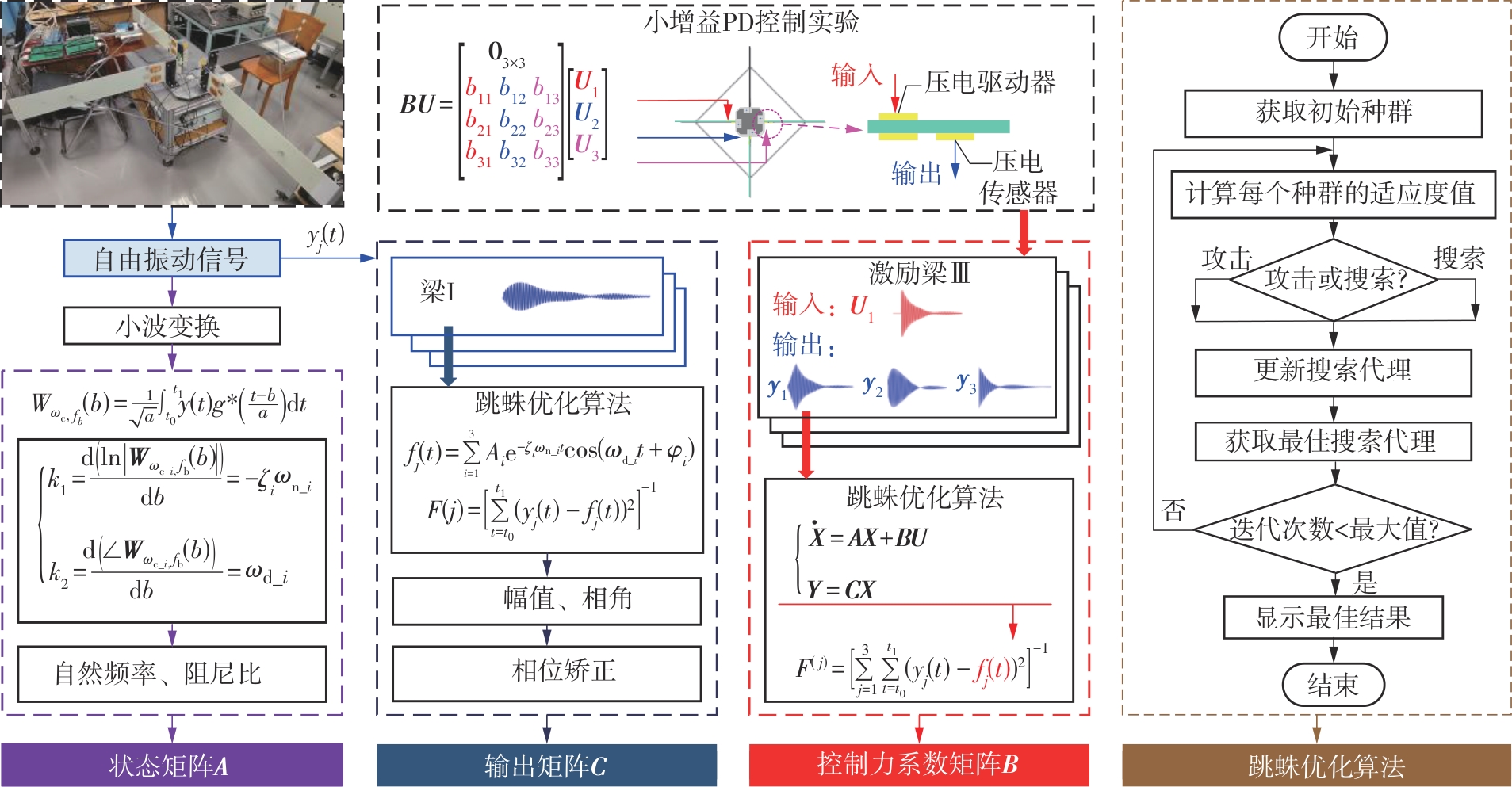
在航空航天领域,刚柔耦合结构凭借其高结构效率被广泛应用,但刚柔耦合效应的存在给振动主动控制带来了巨大挑战。为解决这一难题,该文以三柔性梁耦合系统为研究对象,开展振动主动控制研究。首先,搭建了三柔性梁耦合系统振动测控平台,利用压电传感器与驱动器实现振动信号的检测与抑制,在此基础上进行振动测量与控制算法设计。随后,通过有限元方法结合哈密顿变分原理建立系统动力学模型,在仿真环境下确定了系统自由振动的主要模态振型,引入模态坐标后采用模态截断法获取系统状态空间方程。同时,针对模型参数的不确定性,运用小波分析和跳蛛优化算法对系统状态空间方程参数进行了精确辨识。此外,考虑到系统存在非线性和参数不确定性,设计了基于高斯隶属函数的模糊逻辑控制器,用于抑制柔性梁的振动。仿真和实验结果表明,在相同控制饱和电压周期内,模糊逻辑控制器在抑制三柔性梁耦合系统振动时比大增益比例微分(PD)控制表现更优,它能在快速抑制大幅值振动的同时,以更快的速度抑制小幅值振动,有效缩短系统达到稳定状态的时间,显著提升振动控制效果。该文设计的基于高斯隶属函数的模糊逻辑控制器克服了刚柔耦合结构振动控制中非线性和参数不确定性的难题,相比传统大增益PD控制展现出了更强的适应性和更高的控制效率。
中图分类号: