| [1] |
王之中,余荣杰,来飞,等 .国家自然科学基金委员会交通与运载工程学科2023年度管理工作综述[J].交通运输工程学报,2024,24(1):1-8.
|
|
WANG Zhizhong, YU Rongjie, LAI Fei,et al .Review on management of transportation and vehicle engineering discipline of NSFC in 2023[J].Journal of Tra-ffic and Transportation Engineering,2024,24(1):1-8.
|
| [2] |
李升波,刘畅,殷玉明,等 .汽车端到端自动驾驶系统的关键技术与发展趋势[J].人工智能,2023(5):1-16.
|
|
LI Shengbo, LIU Chang, YIN Yuming,et al .Key technologies and development trends of end-to-end automated driving systems for autonomous vehicles[J].Artificial Intelligence View,2023(5):1-16.
|
| [3] |
袁佩君 .自动驾驶汽车交通肇事的归责困境及刑法应对[J].华南理工大学学报(社会科学版),2023,25(2):30-40
|
|
YUAN Peijun .The dilemma of attributing responsibility to traffic accidents caused by self-driving cars and the countermeasures of criminal law[J].Journal of South China University of Technology (Social Science Edition),2023,25(2):30-40
|
| [4] |
LIU Yuyan, TIGHT M, SUN Quanxin,et al .A systematic review:road infrastructure requirement for connected and autonomous vehicles (CAVs)[J].Journal of Physics:Conference Series,2019,1187(4):42-73.
|
| [5] |
何永明,邢婉钰,魏堃,等 .超高速公路自动驾驶车辆换道轨迹规划策略[J].华南理工大学学报(自然科学版),2024,52(4):104-113
|
|
HE Yongming, XING Wanyu, WEI Kun,et al .Lane-changing trajectory planning strategy for autonomous vehicles on superhighways[J].Journal of South China University of Technology (Natural Science Edition),2024,52(4):104-113.
|
| [6] |
徐进,陈钦,陈正委,等 .适应无人驾驶汽车的道路设施设计综述[J].西南交通大学学报,2023,58(6):1366-1377.
|
|
XU Jin, CHEN Qin, CHEN Zhengwei,et al .Review of roadway facility design for self-driving cars[J].Journal of Southwest Jiaotong University,2023,58(6):1366-1377.
|
| [7] |
LIU Zhaocai, SONG Ziqi .Strategic planning of dedicated autonomous vehicle lanes and autonomous vehicle/toll lanes in transportation networks[J].Transportation Research Part C:Emerging Technologies,2019,10:381-403.
|
| [8] |
CHEN Zhibin, HE Fang, ZHANG Lihui,et al .Optimal deployment of autonomous vehicle lanes with endogenous market penetration[J].Transportation Research Part C:Emerging Technologies,2016,72:143-156.
|
| [9] |
LIU Hao, KAN Xingan, SHLADOVER S E,et al .Modeling impacts of cooperative adaptive cruise control on mixed traffic flow in multi-lane freeway facilities[J].Transportation Research Part C:Emerging Technologies,2018,95:261-279.
|
| [10] |
姚志洪,郝慧君,巫雪梅,等 .考虑自动驾驶的混合交通流路段阻抗函数[J].交通运输工程与信息学报,2021,19(4):1-12.
|
|
YAO Zhihong, HAO Huijun, WU Xuemei,et al .Cost function of mixed traffic flow with autonomous driving[J].Journal of Transportation Engineering and Information,2021,19(4):1-12.
|
| [11] |
常鑫,李海舰,荣建,等 .混有网联车队的高速公路通行能力分析[J].华南理工大学学报(自然科学版),2020,48(4):142-148.
|
|
CHANG Xin, LI Haijian, RONG Jian,et al .Analysis of capacity for mixed traffic flow with connected vehicle platoon on freeway[J].Journal of South China University of Technology (Natural Science Edition),2020,48(4):142-148.
|
| [12] |
公路工程技术标准: [S].
|
| [13] |
公路路线设计规范: [S].
|
| [14] |
OTHMAN K .Impact of autonomous vehicles on the physical infrastructure:changes and challenges[J].Designs,2021,5(3):40.
|
| [15] |
GARCÍA A, CAMACHO-TORREGROSA F J .Influence of lane width on semi- autonomous vehicle performance[J].Transportation Research Record,2020,2674(9):279-286.
|
| [16] |
HU Hongyu, GAO Zhenhai, YU Ziwen,et al .An experimental driving simulator study of unintentional lane departure[J].Advances In Mechanical Engineering,2017,9(10):1-8.
|
| [17] |
RAJU N, KUMAR P, JAIN A,et al .Application of trajectory data for investigating vehicle behavior in mixed traffic environment[J].Transportation Research Record,2018,2672(43):122-133.
|
| [18] |
GHASEMZADEH A, AHMED M M .Utilizing naturalistic driving data for in-depth analysis of driver lane-keeping behavior in rain:non-parametric MARS and parametric logistic regression modeling approaches[J].Transportation Research Part C-Emerging Technologies,2018,90:379-392.
|
| [19] |
CHANG Xin, LI Haijian, RONG Jian,et al .Determining the appropriate lane width at urban signalised intersections-a case study in Beijing[J].IET Intelligent Transport Systems,2019,13(12):1785-1791.
|
| [20] |
DING Rui, PAN Cunshu, DAI Zhenhua,et al .Lateral oscillation characteristics of vehicle trajectories on the straight sections of freeways[J].Applied Sciences,2022,12(22):11498.
|
| [21] |
庄稼丰,李正军,丁瑞,等 .高速公路车辆轨迹摆动特征与小客车道宽度研究[J].交通运输系统工程与信息,2023,23(1):324-336.
|
|
ZHUANG Jiafeng, LI Zhengjun, DING Rui,et al .Vehicles trajectory oscillation characteristics and passenger cars’ lane width for freeways[J].Journal of Transportation Systems Engineering and Information Technology,2023,23(1):324-336.
|
| [22] |
CAI Guoshun, XU Liwei, LIU Ying,et al .Robust preview path tracking control of autonomous vehicles under time-varying system delays and saturation[J].IEEE Transactions on Vehicular Technology,2023,72(7):8486-99.
|
| [23] |
WEIGEL H, LINDNER P, WANIELIK G .Vehicle tracking with lane assignment by camera and lidar sensor fusion[C]∥ Proceeding of the 2009 IEEE Intelligent Vehicles Symposium.Xi’an:IEEE,2009:513-520.
|
| [24] |
Hillel A BAR, LERNER R, LEVI D,et al .Recent progress in road and lane detection:a survey[J].Machine Vision and Applications 2014,25:727-745.
|
| [25] |
LIU Xin, XU Xin, DAI Bin .Vision-based long-distance lane perception and front vehicle location for full autonomous vehicles on highway roads[J].Journal of Central South University,2012,19(5):1454-1465.
|
| [26] |
LIU Ruijin, YUAN Zejian, LIU Tie, al et,End-to-end lane shape prediction with transformers[C]∥ Proceedings of the IEEE/CVF Winter Conference on Applications of Computer Vision.Waikoloa:IEEE,2021:3694-3702.
|
| [27] |
WANG Yue, TEOH E K, SHEN Dinggang .Lane detection and tracking using B-Snake[J].Image and Vision Computing,2004,22(4):269-280.
|
| [28] |
赵祥模国家重点研发计划( 2021 YFB2501200)团队.自动驾驶测试与评价技术研究进展[J].交通运输工程学报,2023,23(6):10-77.
|
|
ZHAO Xiang mo’s Team Supported by the National Key Research and Development Program of China (2021 YFB2501200).Research progress in testing and evaluation technologies for autonomous driving[J].Journal of Traffic and Transportation Engineering,2023,23(6):10-77.
|
| [29] |
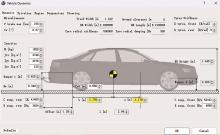
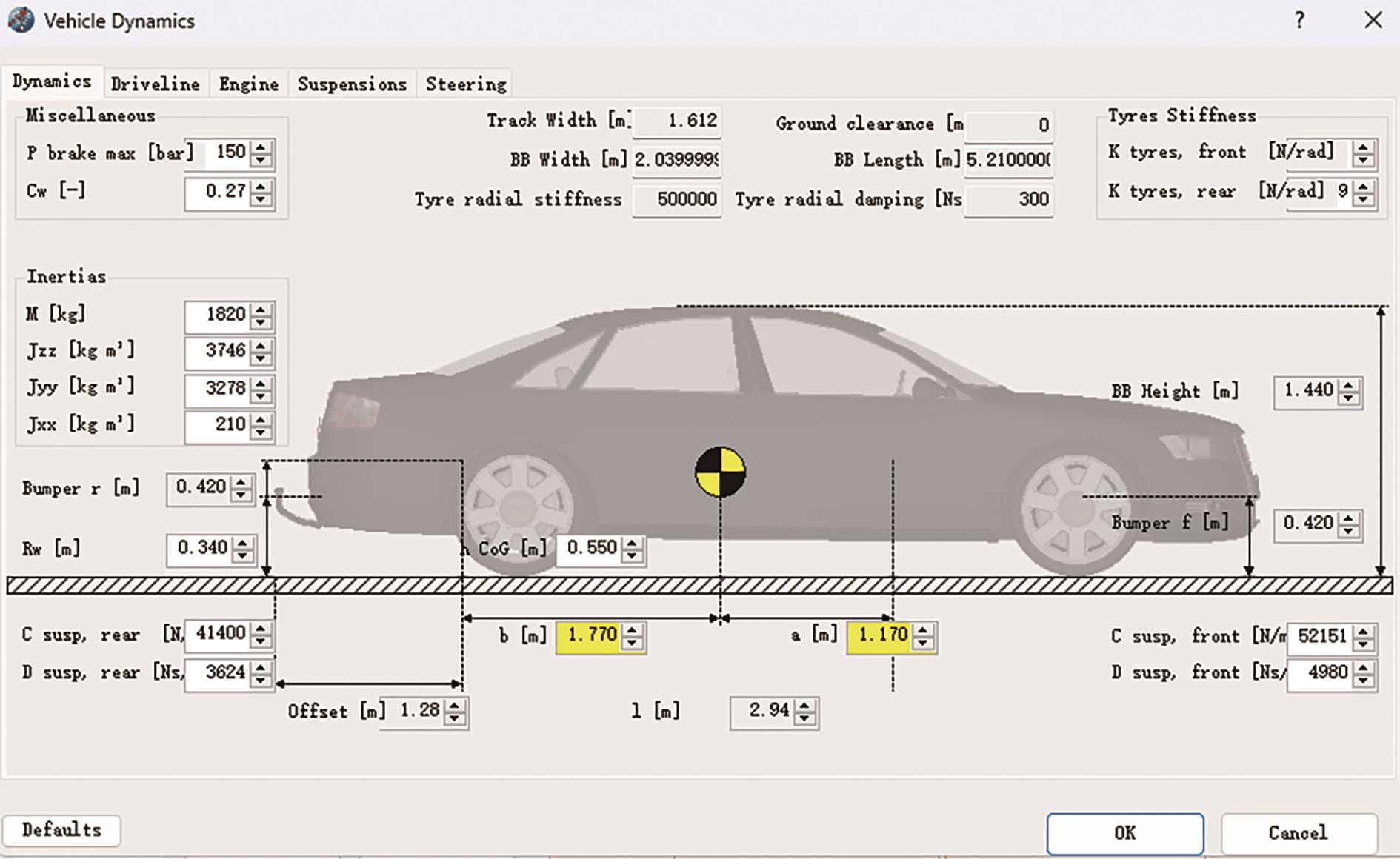
王晓飞,申天杰,郭月利,等 .基于PreScan的自动驾驶小客车弯坡段轨迹偏移研究[C]∥ 2024世界交通运输大会(WTC2024)论文集(公路工程).北京:人民交通出版社,2024:7.
|
| [30] |
华南理工大学 .一种自动驾驶专用车道的高速公路横断面设计方法及系统:CN202410534960.X[P].2024-08-16.
|
| [31] |
孙福昌,邵金菊,单少飞,等 .适应道路曲率多变的前馈-预测LQR横向控制[J].重庆理工大学学报(自然科学),2024,38(2):45-54.
|
|
SUN Fuchang, SHAO Jinju, SHAN Shaofei,et al .Feed-forward predictive LQR lateral control adapted to variable road curvature[J].Journal of Chongqing University of Technology (Natural Science),2024,38(2):45-54.
|
| [32] |
王文涛 .面向车道居中的转向驾驶权切换控制研究[D].长春:吉林大学,2023.
|
| [33] |
贾立新,林秀锐,倪洪杰,等 .基于紧约束鲁棒模型预测控制的无人车辆轨迹跟踪控制[J].高技术通讯,2024,34(3):275-281.
|
|
JIA Lixin, LIN Xiurui, NI Hongjie,et al .Trajectory tracking control of unmanned vehicles based on tight constrained robust model predictive control[J].Chinese High Technology Letters,2024,34(3):275-281.
|
| [34] |
李学慧,苏振,张俊友 .多参数优化MPC的自动驾驶轨迹跟踪控制[J].重庆理工大学学报(自然科学),2024,38(2):55-64.
|
|
LI Xuehui, SU Zhen, ZHANG Junyou .Research on autonomous driving trajectory tracking control by multi-parameter optimization MPC[J].Journal of Chongqing University of Technology (Natural Science),2024,38(2):55-64.
|