Journal of South China University of Technology(Natural Science Edition) ›› 2024, Vol. 52 ›› Issue (6): 73-80.doi: 10.12141/j.issn.1000-565X.230398
• Mechanical Engineering • Previous Articles Next Articles
Artificial Bladder Detrusor System Driven by Shape Memory Alloy
LI Xiao( ), LI Yapeng
), LI Yapeng
- School of Electromechanical Engineering,Guangdong University of Technology,Guangzhou 510006,Guangdong,China
-
Received:2023-06-12Online:2024-06-25Published:2023-12-27 -
About author:李笑(1962—),男,博士,教授,主要从事机电液智能控制与应用、生物医疗器械等研究。E-mail: lixiao@gdut.edu.cn -
Supported by:the National Natural Science Foundation of China(52075101)
CLC Number:
Cite this article
LI Xiao, LI Yapeng. Artificial Bladder Detrusor System Driven by Shape Memory Alloy[J]. Journal of South China University of Technology(Natural Science Edition), 2024, 52(6): 73-80.
share this article
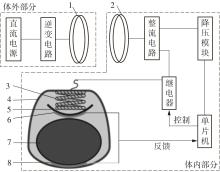
Fig.1
Composition of artificial detrusor system"
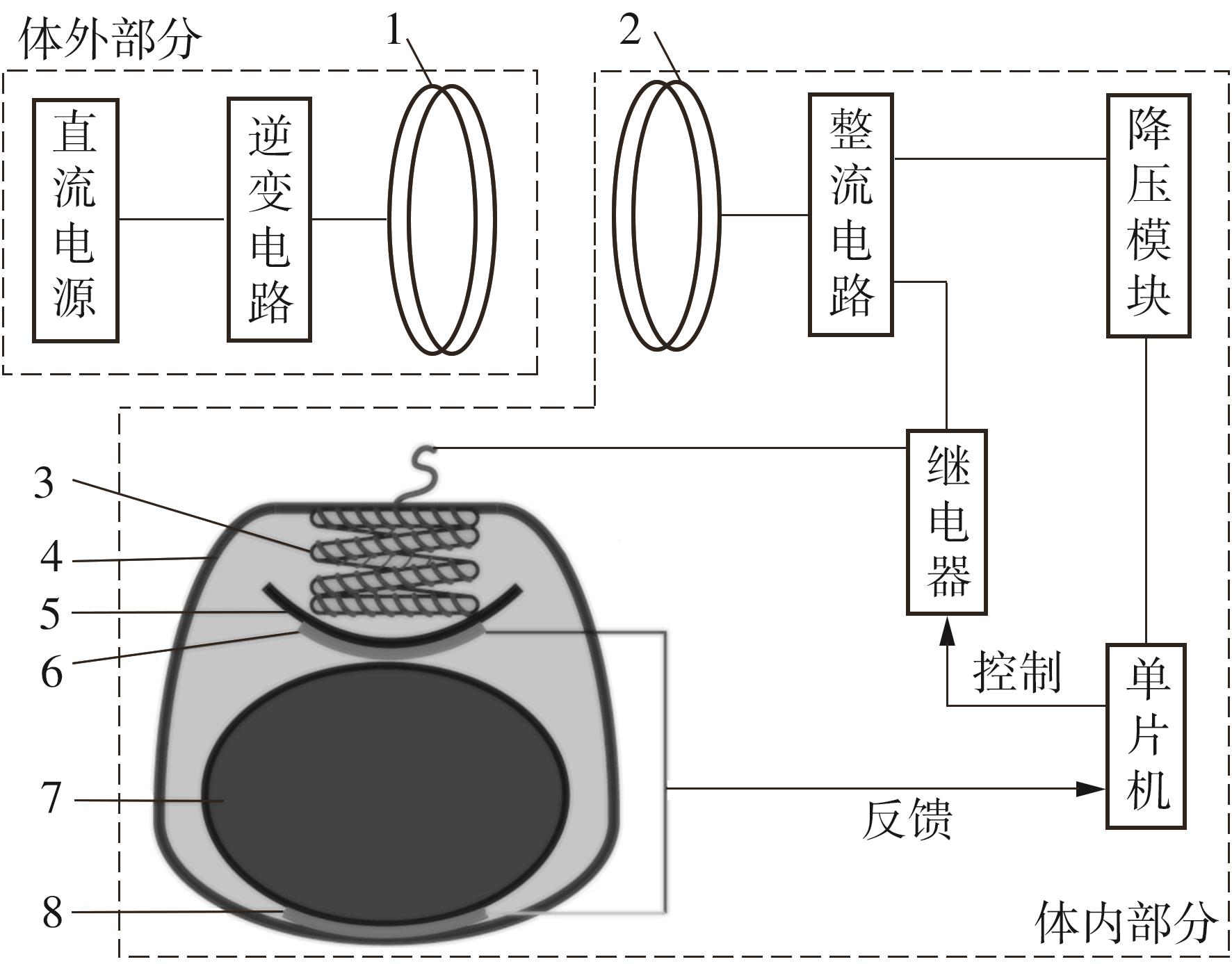

Fig.2
Simulation model of bladder compression"
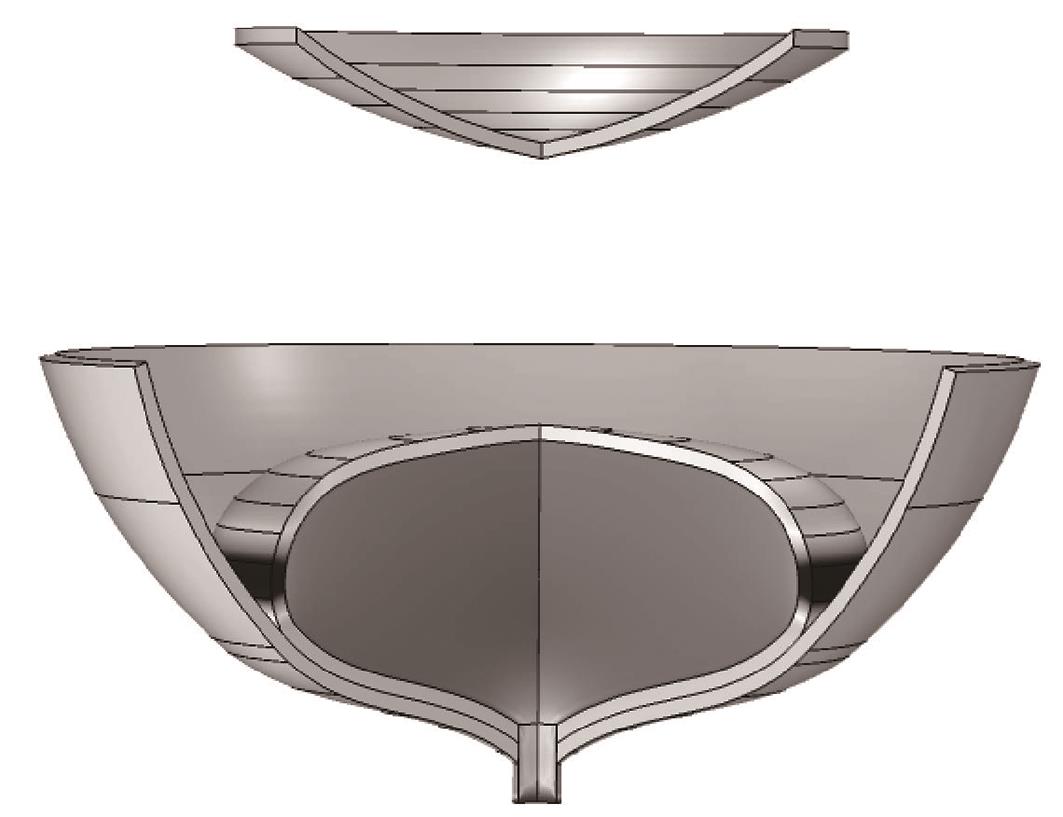

Fig.3
Simulation of urine storage phase"
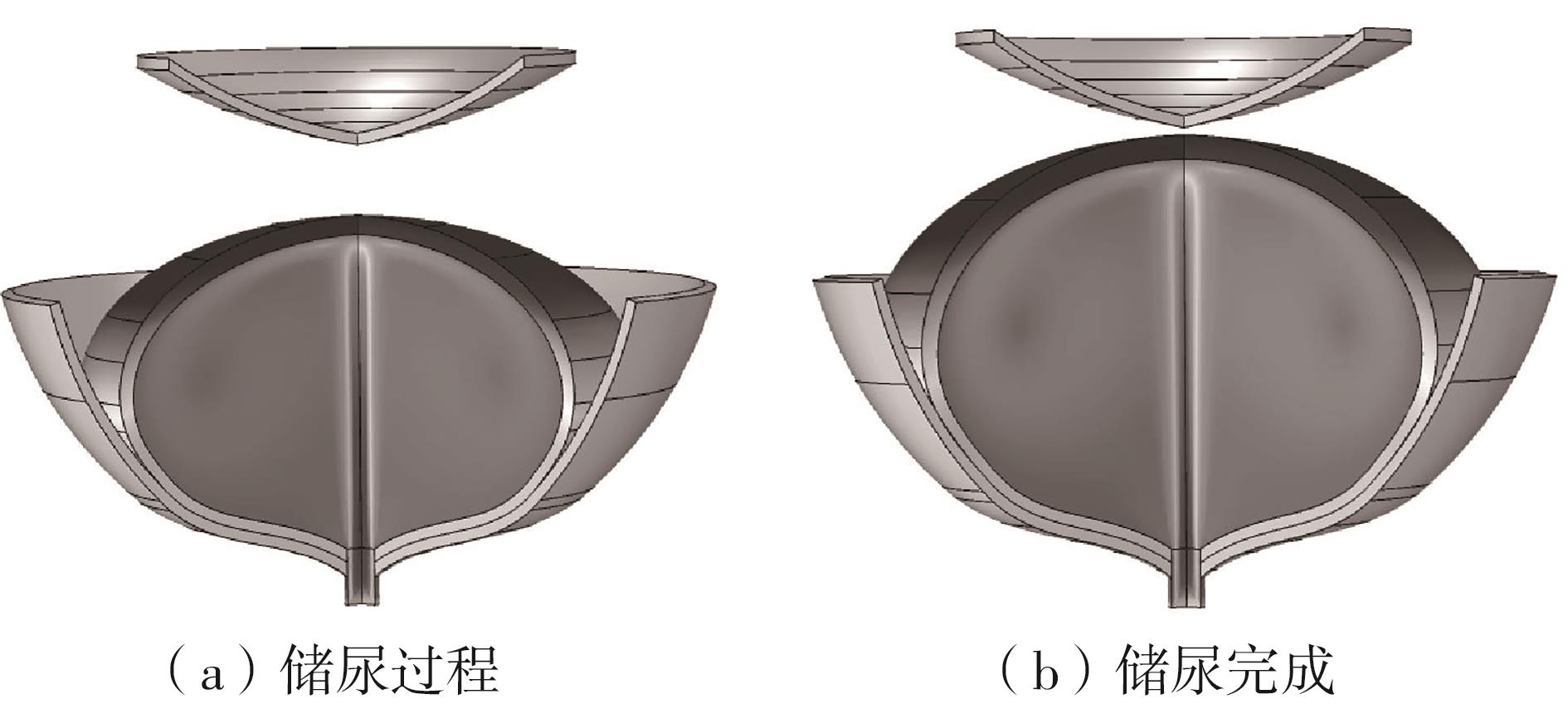

Fig.4
Simulation of urination phase"
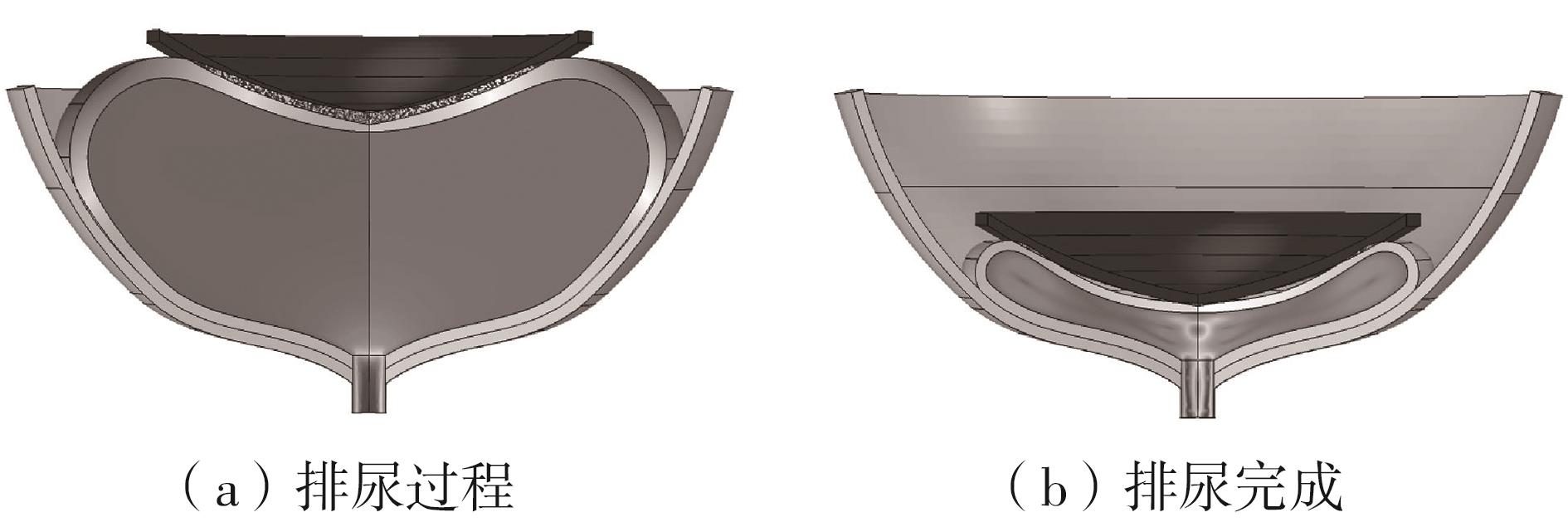
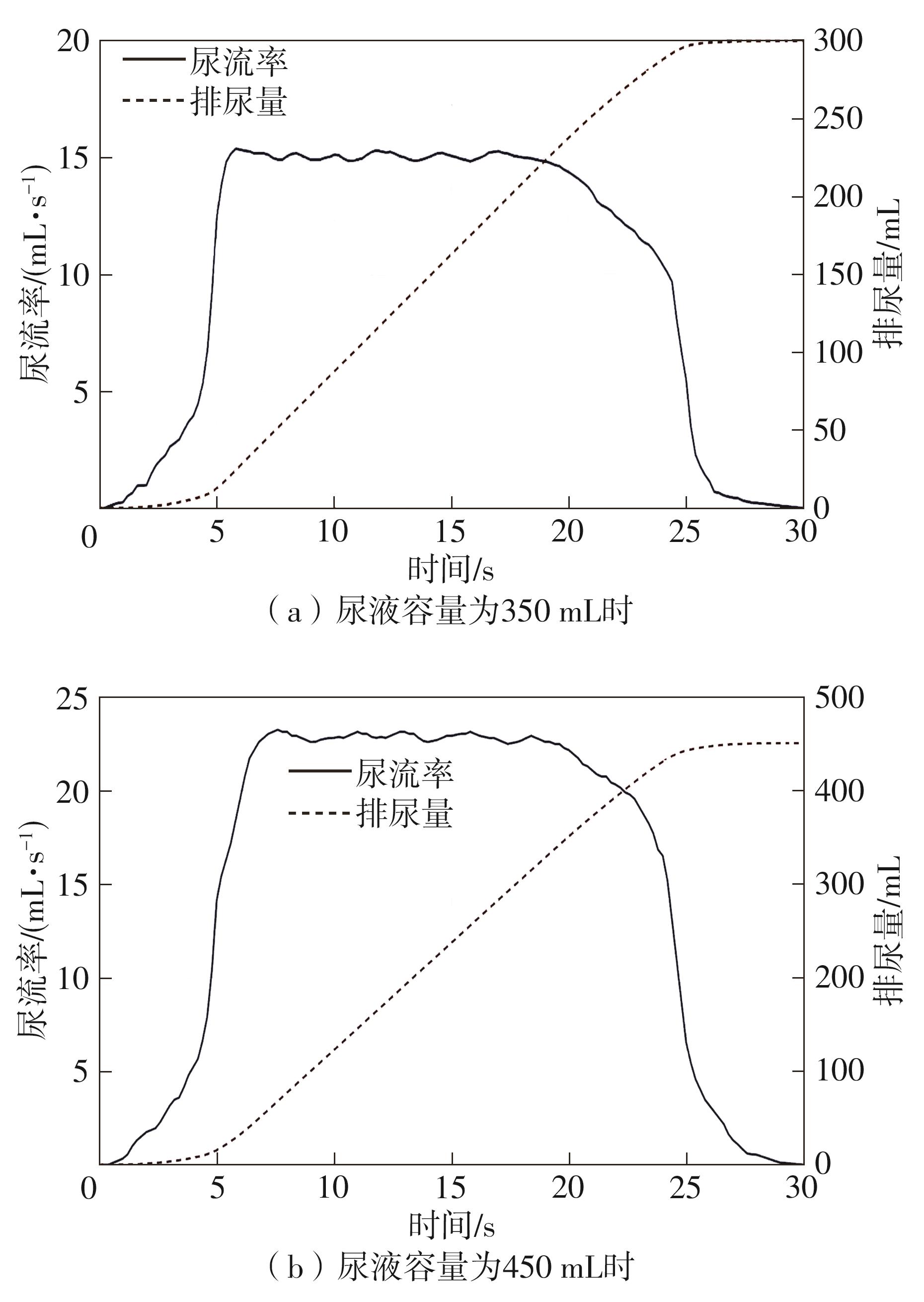
Fig.5
Simulated curve of urine flow rate"
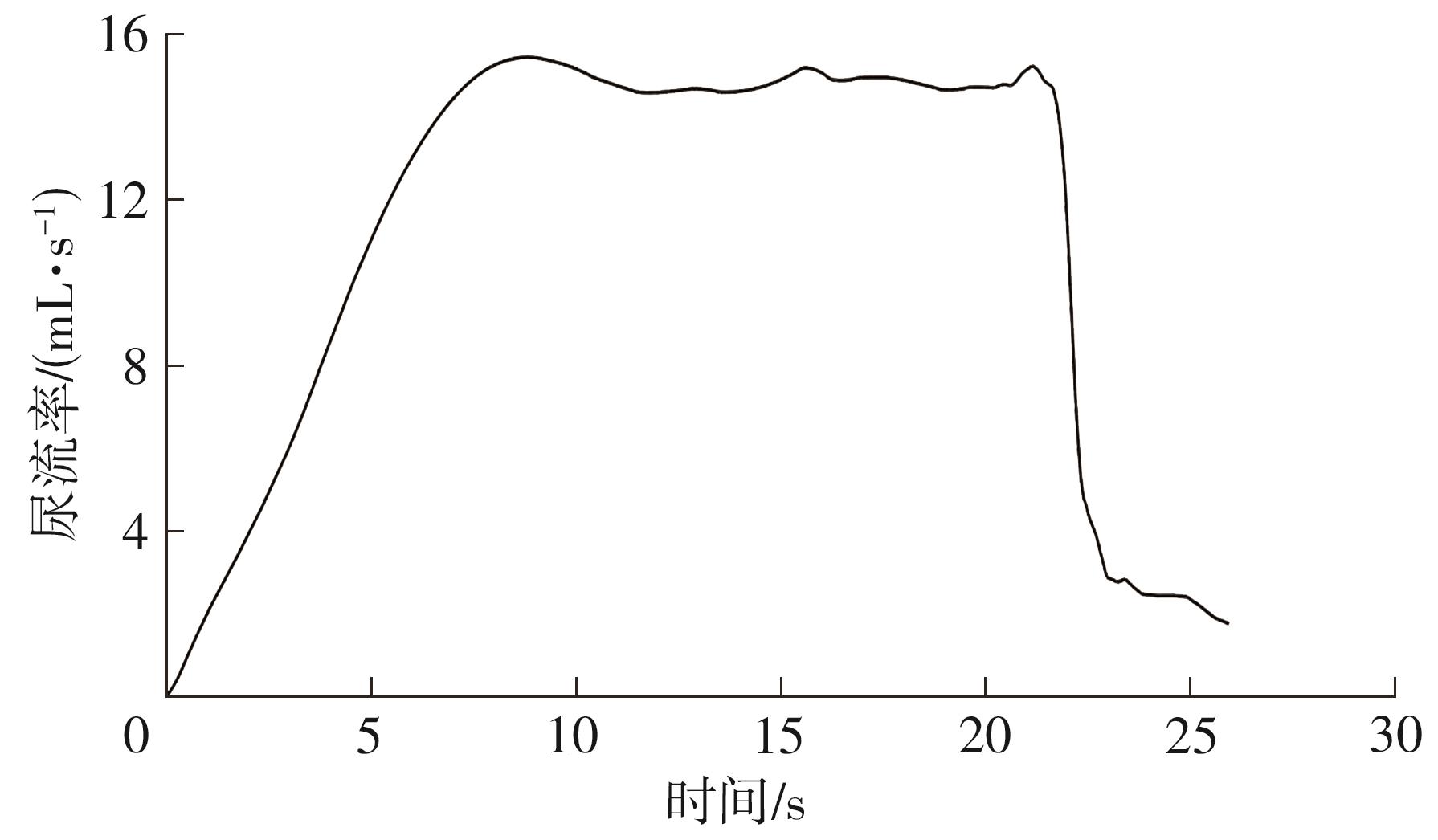
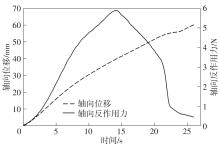
Fig.6
Axial displacement and axial reaction force of bladder pusher"
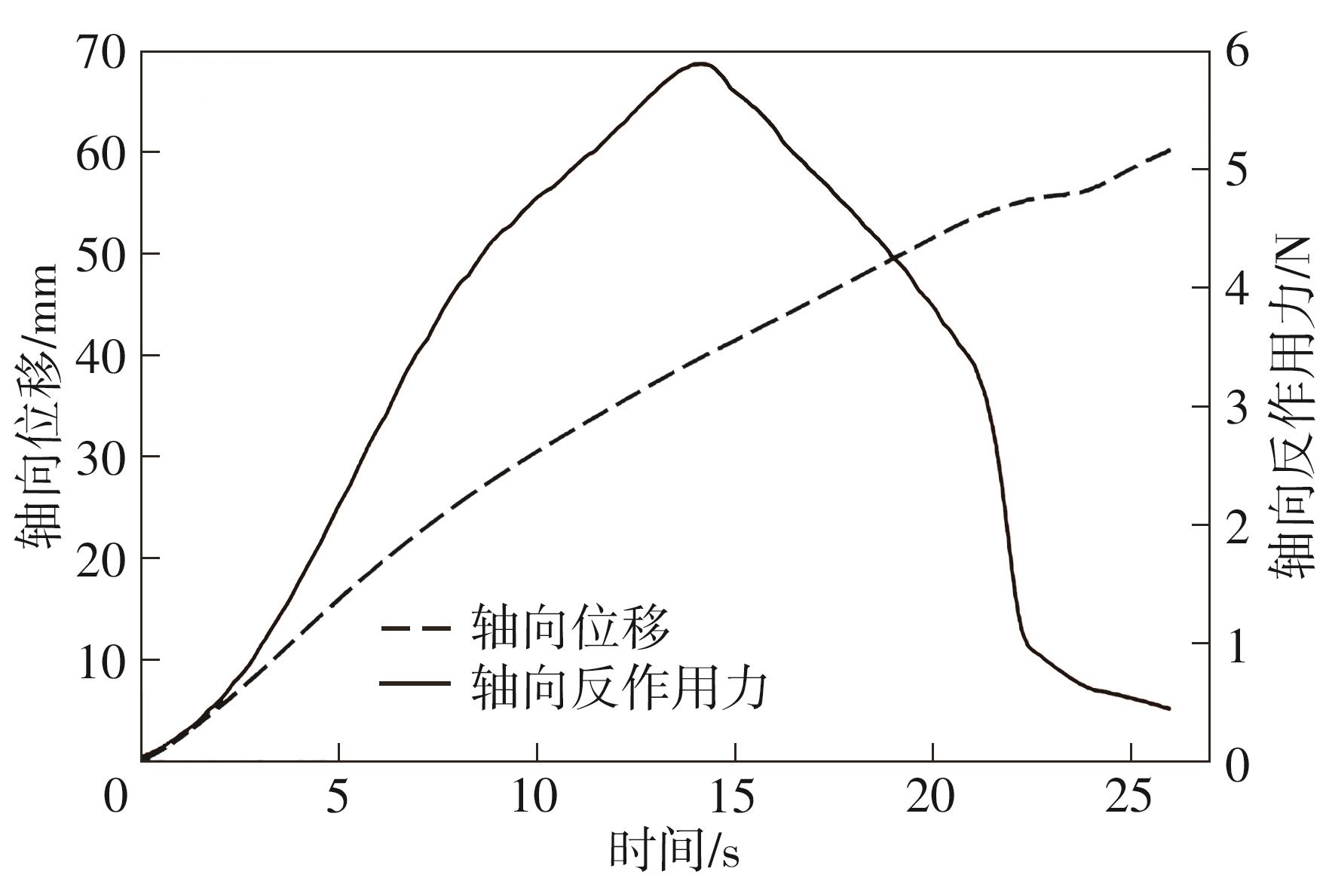
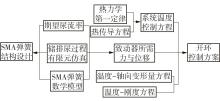
Fig.7
Calculation process of open-loop control scheme"
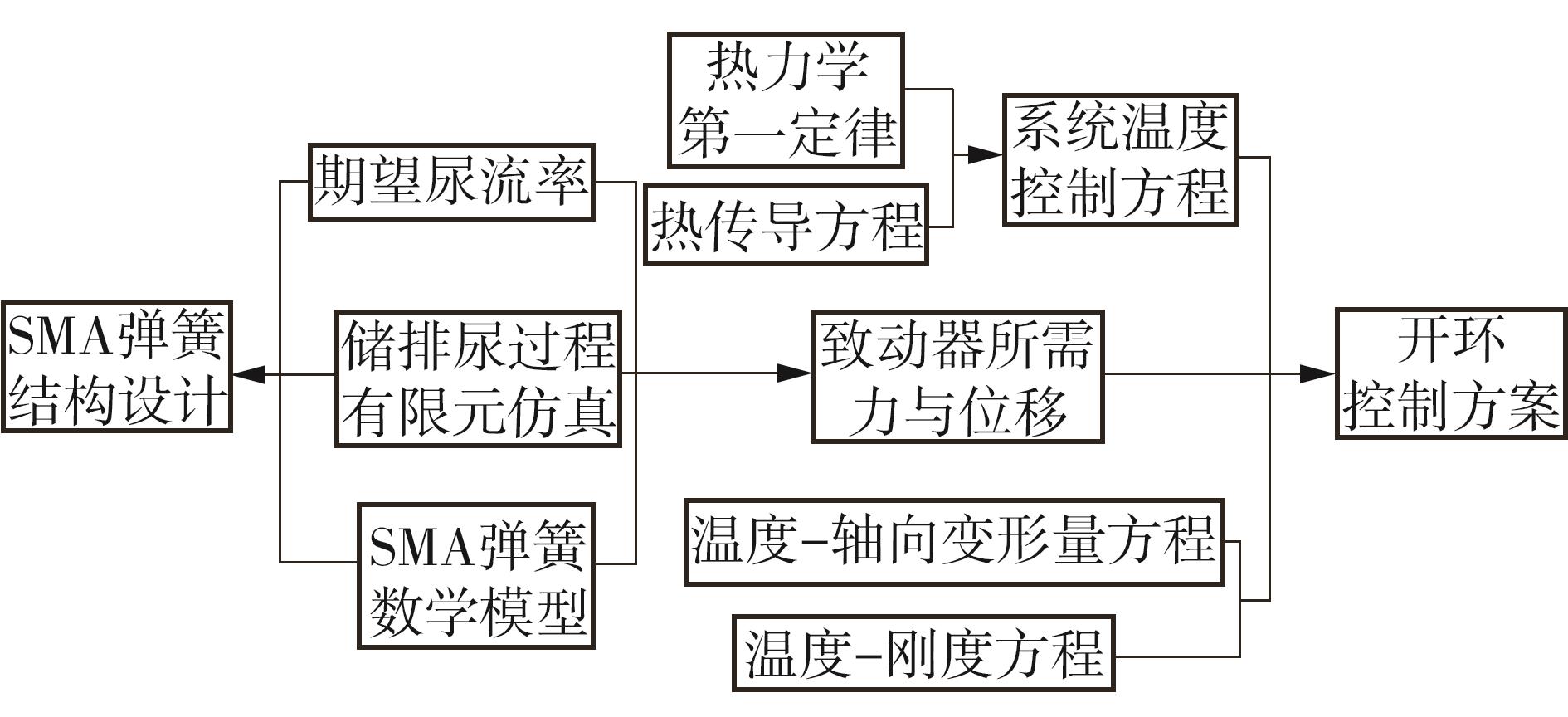

Fig.8
Implementation process of open-loop control scheme"
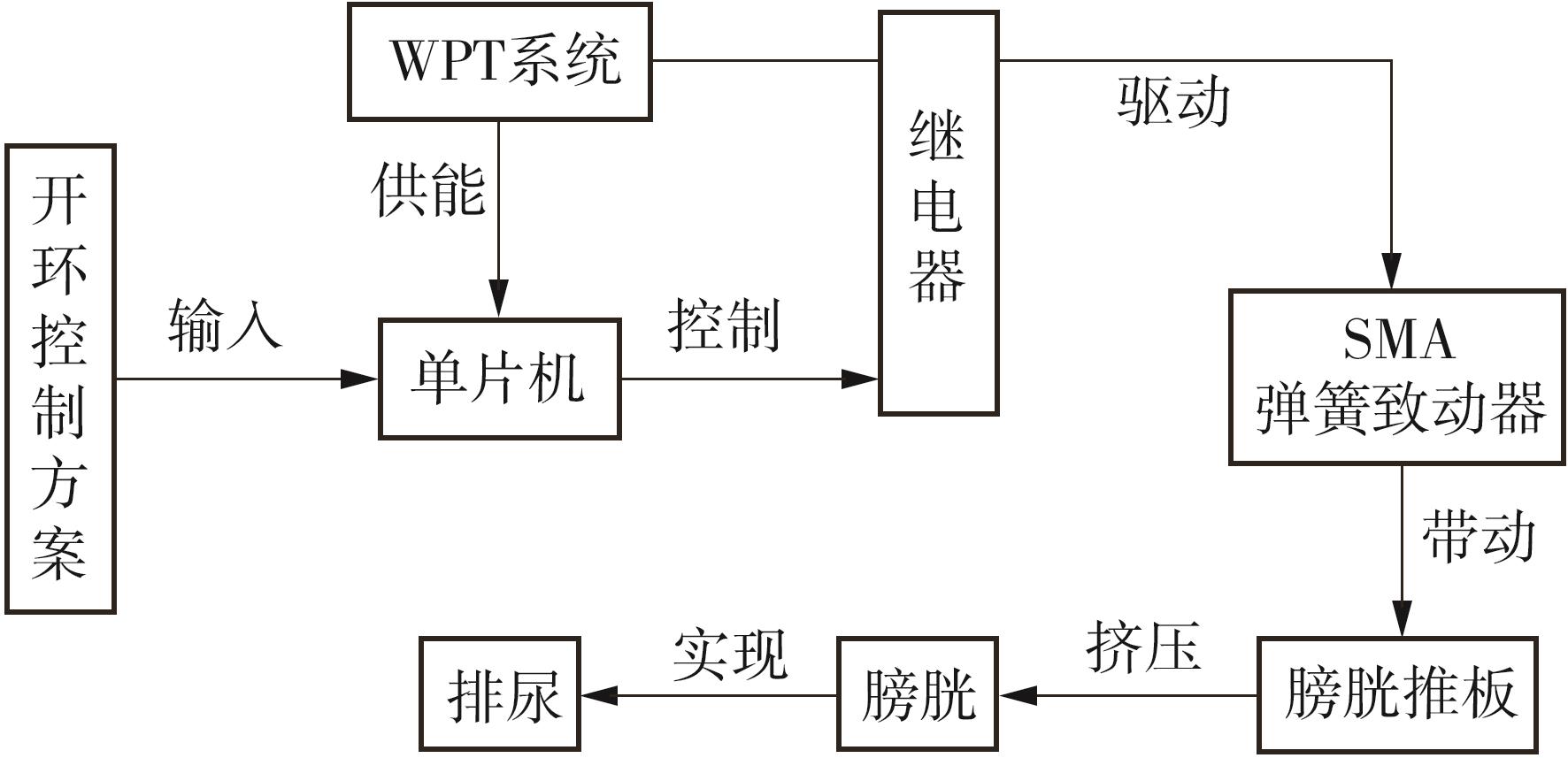
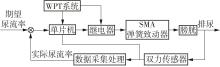
Fig.9
Structure of closed-loop control"
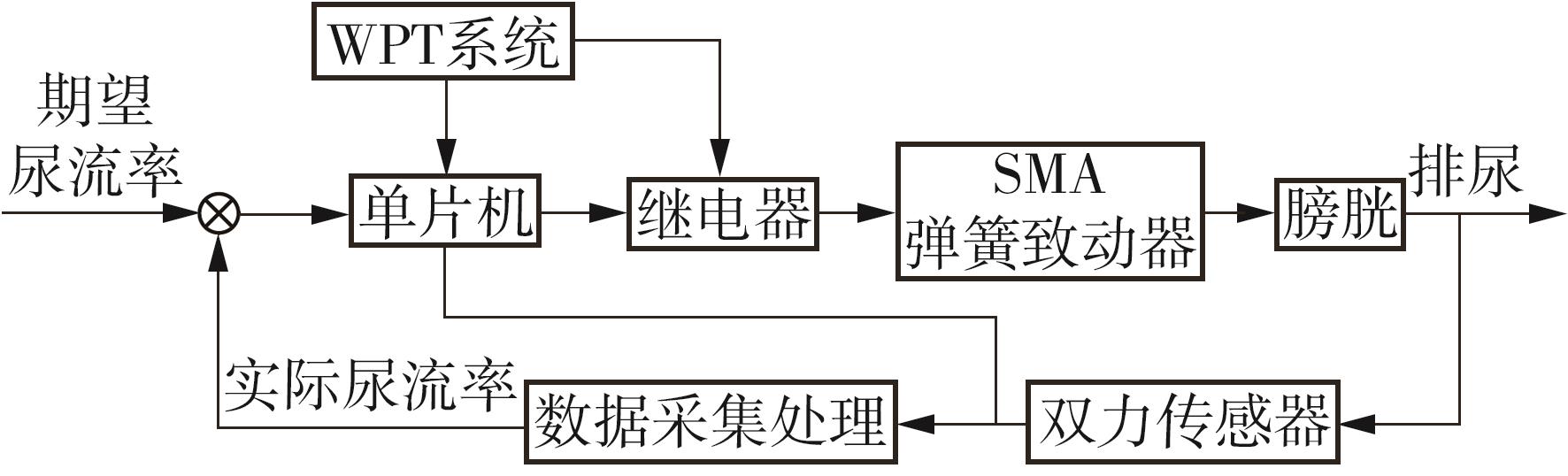
Fig.10
Schematic diagram of simulation experiment platform"

Fig.11
Photograph of simulation experiment platform"
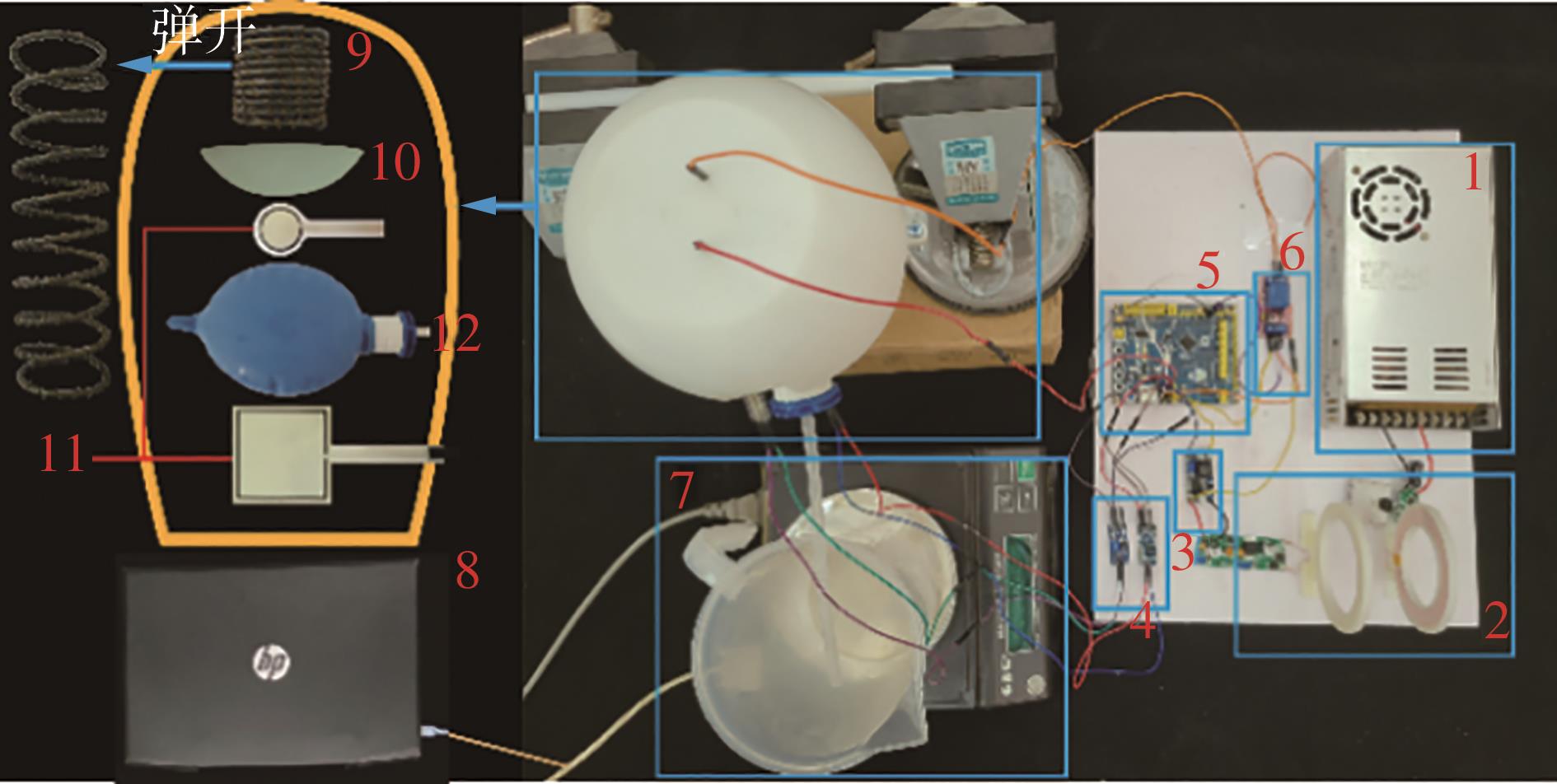
Table 1
Models or parameters of the employed experiment equipment"
| 名称 | 型号或参数 | 名称 | 型号或参数 | ||
|---|---|---|---|---|---|
| 单片机 | STM32F103R | 上传感器 | IMS-C20A | ||
| 降压模块 | LM2596S | 下传感器 | IMS-S40A | ||
| 继电器 | JQC-3FF-S | 电子秤 | JJ1000 | ||
| WPT模块 | A03-01 | 线性转换模块 | 0~5 V | ||
Table 2
Main material parameters of SMA helical spring"
| 参数 | 取值 | 参数 | 取值 | ||
|---|---|---|---|---|---|
| EM/MPa | 65 000 | CM/(MPa·K-1) | 9 | ||
| EA/MPa | 243 000 | CA/(MPa·K-1) | 13.8 | ||
| σ | 100 | ν | 0.33 | ||
| δm/(kW·m-1·K-1) | 0.86 | c1/(J·g-1·K-1) | 0.41 | ||
| δa/(kW·m-1·K-1) | 1.8 | m1/g | 2.55 | ||
| As/℃ | 38 | c2/(J·g-1·K-1) | 0.837 | ||
| Af /℃ | 54 | m2/g | 17.5 | ||
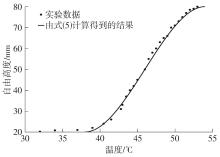
Fig.12
Relationship curve of free height versus temperature of SMA helical spring"
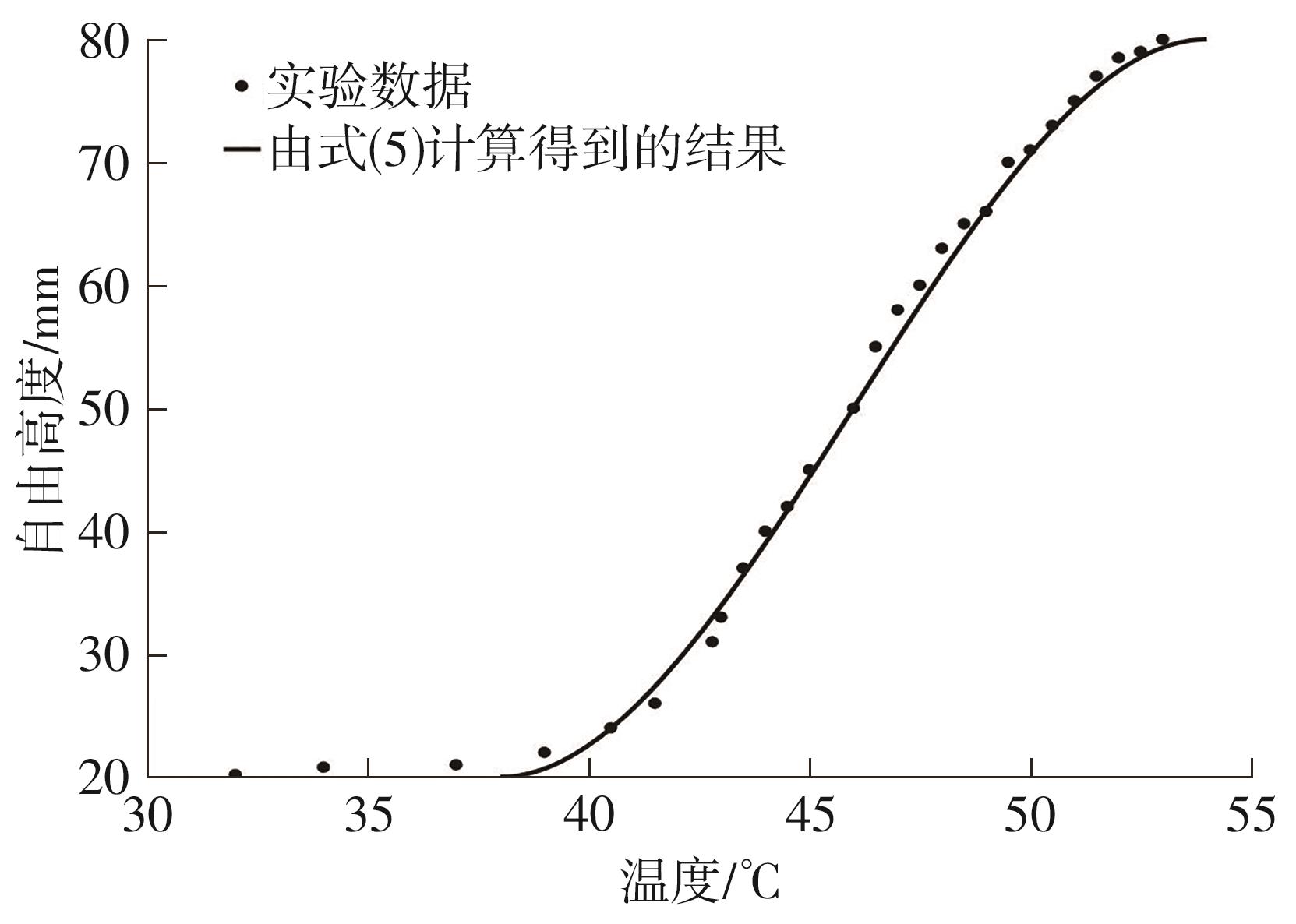
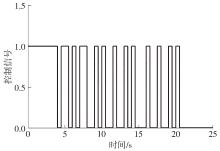
Fig.13
Circuit control signal of open-loop strategy"
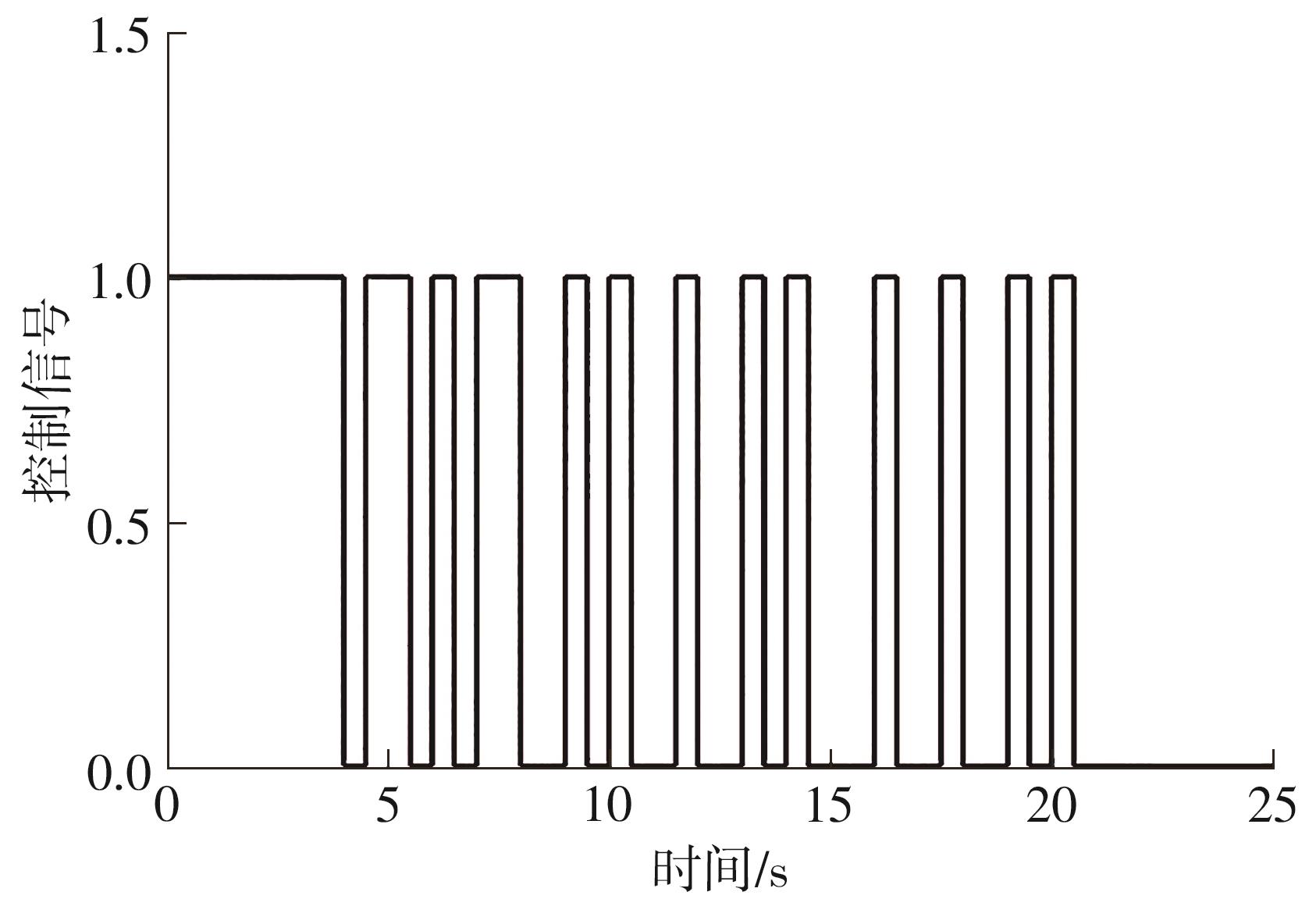
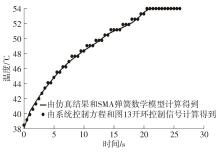
Fig.14
Calculation results of SMA helical spring temperature"
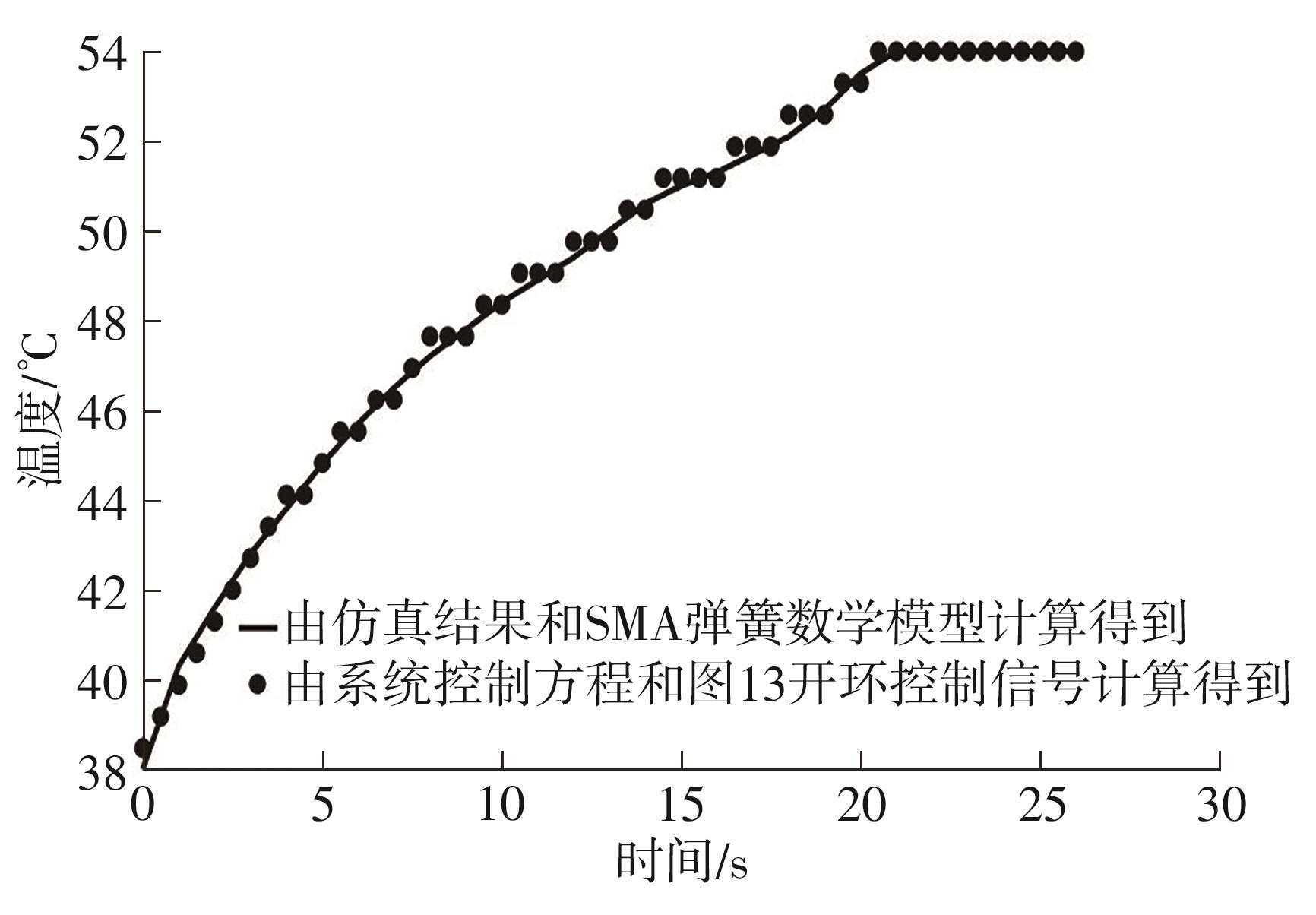

Fig.15
Experimental urine flow rate curves under the open-loop control strategy"
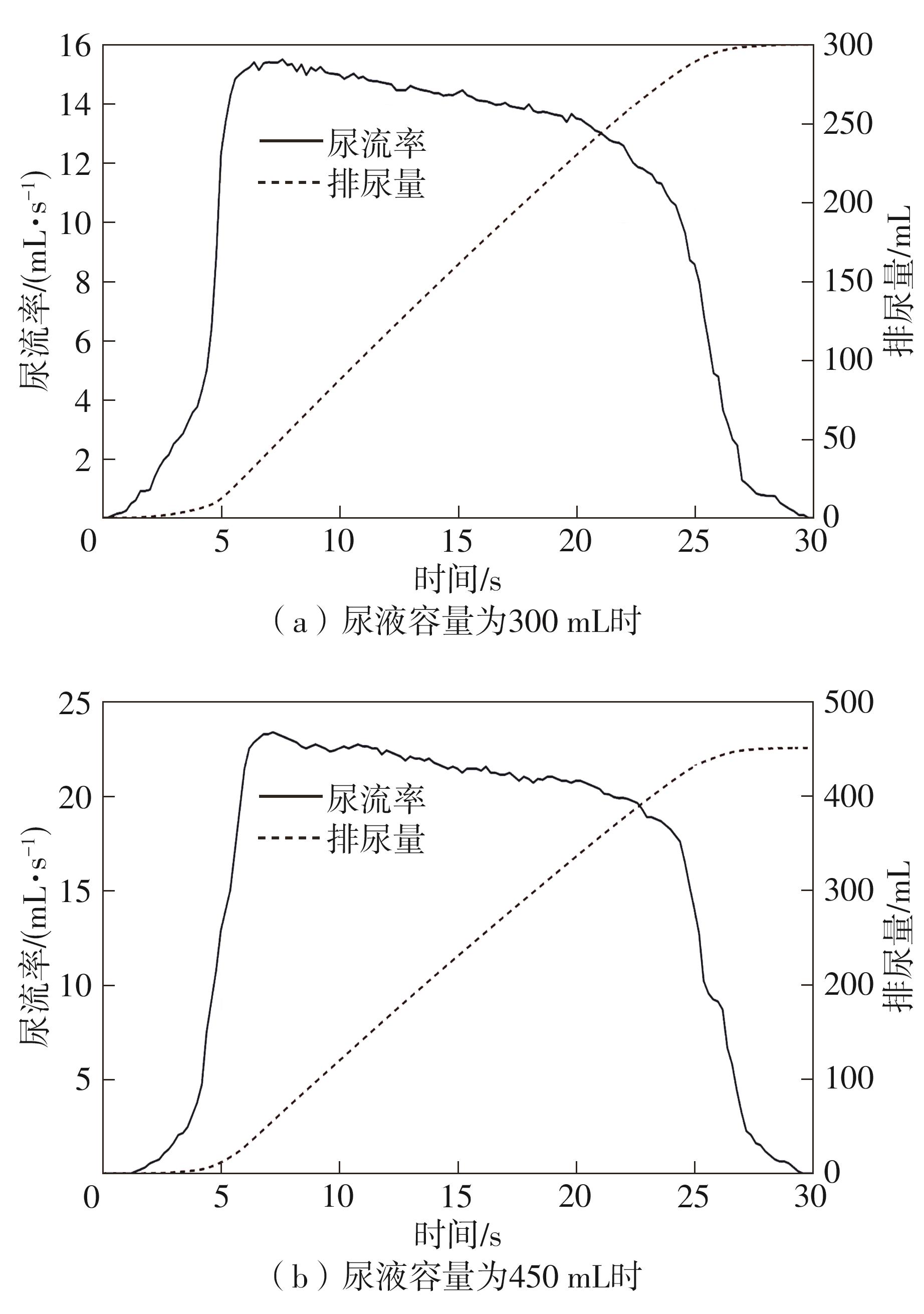

Fig.16
Experimental urine flow rate curves under the closed-loop control strategy"
| 1 | METE U K, POWELL C R .Review of current neurogenic bladder best practices and international guidelines[J].Current Bladder Dysfunction Reports,2020,15:283-295. |
| 2 | LI X, GUAN T, ZHOU D,et al .Design and investigation of bladder power pump driven by an external electromagnet[J].Journal of Mechanical Science and Technology,2014,28:3589-3596. |
| 3 | YANG X, AN C, LIU S,et al .Soft artificial bladder detrusor[J].Advanced Healthcare Materials,2018,7(6):1701014/1-9. |
| 4 | HASSANI F A, GAMMAD G G L, MOGAN R P,et al .Design and anchorage dependence of shape memory alloy actuators on enhanced voiding of a bladder[J].Advanced Materials Technologies,2018,3(1):1700184/1-12. |
| 5 | HASSANI F A, PEH W Y X, GAMMAD G G L,et al .A 3D printed implantable device for voiding the bladder using shape memory alloy (SMA) actuators[J].Advanced Science,2017,4(11):1700143/1-10. |
| 6 | HASSANI F A, JIN H, YOKOTA T,et al .Soft sensors for a sensing-actuation system with high bladder voiding efficiency[J].Science Advances,2020,6(18):eaba0412/1-8. |
| 7 | KIGUCHI K, SAKAMOTO Y, NAKASHIMA K,et al .Development of an urination assist system - a bladder compressing system with a link-work mechanism[C]∥Proceedings of the 2007 IEEE International Conference on Mechatronics.[S.l.]:IEEE,2007. |
| 8 | 聂帆宇,李笑,李晓刚 .超声汽化蒸汽驱动的膀胱动力泵尿道阀研究[J].机床与液压,2017,45(1):9-15. |
| NIE Fan-yu, LI Xiao, LI Xiao-gang .Research of the urethral valve for bladder power pump driven by ultrasonic-vaporized steam[J].Machine Tool & Hydraulics,2017,45(1):9-15. | |
| 9 | 胡振,李笑,关婷 .超声汽化蒸汽驱动的尿道阀的仿真与实验[J].中国机械工程,2015,26(13):1789-1793. |
| HU Zhen, LI Xiao, GUAN Ting .Simulation and experiments for urethral valve driven by ultrasonic-vaporized steam[J].China Mechanical Engineering,2015,26(13):1789-1793. | |
| 10 | CASAGRANDE G, IBRAHIMI M, SEMPRONI F,et al .Hydraulic detrusor for artificial bladder active voiding[J].Soft Robotics,2023,10(2):269-279 |
| 11 | 陈忠,崔拮,双卫兵 .神经源性膀胱[M].北京:人民卫生出版社,2009. |
| 12 | KUMAT S S .A robotic device to assist with in-vivo measurement of human pelvic organ tissue properties[D].[S.l.]:[s.n.],2018. |
| 13 | BUSH M B, LIEDL B, WAGENLEHNER F,et al .A finite element model validates an external mechanism for opening the urethral tube prior to micturition in the female[J].World Journal of Urology,2015,33:1151-1157. |
| 14 | MOHD J J, LEARY M, SUBIC A .Designing shape memory alloy linear actuators:a review[J].Journal of Intelligent Material Systems and Structures,2017,28(13):1699-1718. |
| 15 | BRINSON L, BEKKER A, HWANG S .Deformation of shape memory alloys due to thermo-induced transformation[J].Journal of Intelligent Material Systems and Structures,1996,7(1):97-107. |
| [1] | DU Yunwei, WANG Ronghui, ZHEN Xiaoxia, et al. Calculation of Elastic Stiffness of Shear Connector in Steel Concrete Bridge Tower Joint Section [J]. Journal of South China University of Technology(Natural Science Edition), 2023, 51(2): 76-87. |
| [2] | ZHANG Xueguang LIU Chunguo LIANG Jiye. A 3D Die Compensation Method Based on Interpolation Solution and FE Simulation [J]. Journal of South China University of Technology (Natural Science Edition), 2018, 46(7): 100-108. |
| [3] |
PAN Difu CHEN Jun BAO Tianzhe HAN Kun .
Application of Multi-Output Support Vector Regression Hybrid Model in Locomotive Secondary Spring Loads Adjustment
|
| [4] |
PAN Difu CHEN Jun BAO Tianzhe HAN Kun .
Application of Multi-Output Support Vector Regression Hybrid Model in Locomotive Secondary Spring Loads Adjustment
|
| [5] | HE Wei ZHU Liang-sheng HU Jin-peng. Impact of Lingding Navigation Channel on Fresh Salt-Water Mixing in Dry Season [J]. Journal of South China University of Technology (Natural Science Edition), 2017, 45(4): 138-144. |
| [6] | Teng Fei Liang Ji-cai Zhang Wan-xi Wang Xue Gao Song. Springback Prediction of Rectangular Profiles During Three-Dimension Stretch Bending Forming [J]. Journal of South China University of Technology (Natural Science Edition), 2015, 43(2): 107-113. |
| [7] | Xia Qin-xiang Wang Ting Chen Zhi-ping Zhao Xue-zhi Qiu Zun-wen. Forming Quality Control of Multi-Position Progressive Stamping Based on Numerical Simulation [J]. Journal of South China University of Technology (Natural Science Edition), 2014, 42(7): 80-85. |
| [8] | Liang Ji- cai Teng Fei Gao Song Chen Guang- yi Wei Zhi- yong. Multi- Objective Optimization of Flexible Three- Dimensional Stretch-Bending Forming Process of rectangular Hollow Aluminum Profiles [J]. Journal of South China University of Technology (Natural Science Edition), 2013, 41(9): 143-148. |
| [9] | Li Min Zhang Ya-nan Gong Zhen-bang. Development of Robot for Inspecting Exterior of Tubes of Heat Exchangers in Nuclear Power Plants [J]. Journal of South China University of Technology (Natural Science Edition), 2011, 39(8): 48-53. |
| [10] | Ling Yu-hong Peng Hui-hong Zhang Shuai. A Novel SMA Damper and Its Vibration Reduction Performance [J]. Journal of South China University of Technology (Natural Science Edition), 2011, 39(6): 119-125. |
| [11] | Ling Yu-hong Peng Hui-hong Zhang Shuai. Mechanical Behavior of Superelastic NiTi Wires [J]. Journal of South China University of Technology (Natural Science Edition), 2010, 38(4): 131-135,155. |
| [12] | Yang Xiang-an Ruan Feng Zhou Chi. Multi-Objective Optimization of Forming Process of Sheet Metal Based on Springback Control [J]. Journal of South China University of Technology (Natural Science Edition), 2010, 38(12): 7-13. |
| [13] | Liu Qiang Ruan Feng Xue Xin Zhou Chi . Compensation Control of Springback Torsion for 3D Irregular Stamping Parts [J]. Journal of South China University of Technology (Natural Science Edition), 2009, 37(9): 93-97. |
| [14] | . Horizontal Earthquake Isolating Function of the Vertical Spring-steel Rolling Base Isolation Seismic System [J]. Journal of South China University of Technology(Natural Science Edition), 2003, 31(6): 20-25. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||