2024Traffic Safety
In order to obtain the spatial distributing characteristics of hazardous bus driving status, this paper identified the spatial clustering through spatial autocorrelation analysis, determined the hot spots, and analyzed the significant influencing factors. Firstly, the study collected position system data samples of the urban buses for one week in each of the four quarters and modified the duplicate, abnormal and missing data. Bus stops were used as nodes to divide spatial spots, and every spot was numbered. Over speed, urgent acceleration, urgent deceleration and sharp turn were identified as hazardous driving status. The four conditions thresholds were obtained according to the kinematic characteristics of vehicles. The study calculated statistical indicators and global Moran’s Ig of four conditions. The results show that hazardous driving status are spatially clustered (probability of a spatial random distribution p < 0.01, standard deviation score Z > 2.58). Over speed has most significant characteristic of spatial clustering (Ig = 0.731). The study performed local spatial autocorrelation analysis for the four conditions. According to the analysis, local Moran’ s I scatter plots and LISA clustering plots are plotted at 90%, 95% and 99% confidence levels. The hazardous hot spots of urban buses were obtained combining with city maps. Finally, the study selected 9 factors such as road length, number of lanes and straightness to formulate models. The compare and analysis were performed to get the fitting goodness of OLS, SLE, SEM and SDM model. The SDM model was used to obtain the significant influencing factors for 4 dangerous driving states. The results can provide a theoretical basis for supervising the safety operation and identifying the hazardous driving status of urban buses in spatial perspective.
Driving style is the external expression of driving behavior. Drivers with aggressive style tend to engage in more frequent risky driving operations, intensifying interactions between vehicles and affecting lane-changing safety. Identifying a driver’s driving style before executing a lane-changing can effectively constrain driver’s behavior through personalized warning information. This paper proposed the SHAP-XGBoost method, which considers lane-changing game in a connected environment, aiming to achieve the real-time recognition of driving styles during the lane-changing intention phase. Firstly, the fluctuation degree of individual behavior and gaming behavior during the lane-changing intention was used as input feature variables, and the driving style was marked by correlation analysis, principal component analysis, and four different clustering methods. Next, the proposed SHAP-XGBoost model was used to select key features for training the driving style recognition model, and online recognition was completed through a sliding window. Finally, experiments were conducted using the HighD dataset. Results show that: compared with clustering methods based on centroid distance, connectivity and density distribution, spectral clustering based on graph theory principles can better label driving styles based on the morphology of the input feature variables; using the proposed SHAP-XGBoost model with 14 key features for driving style recognition can improve online recognition efficiency without loss of accuracy, and the driving style recognition accuracy is up to 99%; simultaneously incorporating individual features and gaming features as inputs to the model can improve the accuracy of driving style labeling and recognition. The research results can be used to support personalized lane-changing decisions and early warnings.
In order to demonstrate the effectiveness of the warning system, this study explored the influence of the head up display warning system on driving behavior under different weather conditions in the connected environment for pedestrian crossing events. Firstly, this paper designed three warning systems: baseline, head down display (HDD), and head up display (HUD). Based on the driving simulation platform, it developed connected scenarios of urban roads under clear and foggy weather conditions and extracted driving behavior parameters through experimental testing. Then, from the micro level, the paper described the whole spatial change process of driving behavior under the action of connected HUD warning system for pedestrian crossing events, analyzed the influence rules of the warning systems and weather conditions on driving behavior, and constructed the influence model of driving behavior including risk avoidance stage and recovery stage. Next, a comprehensive index system was proposed to reflect the safety level at the risk avoidance stage, the recovery level at the recovery stage and the stability level of the whole process, including the first braking distance, the minimum conflict distance, the recovery stabilization time, the recovery amount of velocity, the maximum deceleration and the maximum acceleration. Finally, it quantified the effects of different warning systems (Baseline/ HDD/ HUD), weather conditions (clear weather/ foggy weather) and the interaction between the two factors on driving behavior. Research shows that the connected HUD warning system for pedestrian crossing events has a significant effect on drivers’ driving behavior in the risk avoidance and recovery stage, and it significantly improves the safety level of driving behavior in the risk avoidance stage. At the same time, it has a significant improvement effect on the recovery efficiency during the recovery stage, and also significantly affects the stability level of the operational characteristics throughout the whole process. The connected HUD warning system for pedestrian crossing events shows more obvious advantages under foggy conditions.
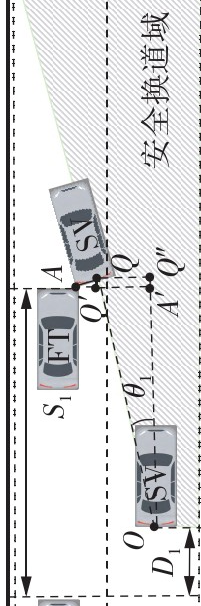
To improve the driving safety of autonomous vehicles on superhighways, this paper proposed a lane-changing trajectory planning strategy. Firstly, five polynomials were used to generate general lane-changing trajectory clusters, and the trajectory planning problem was quantified as the duration of solving lane-changing behavior with the limit of vehicle dynamics and surrounding traffic vehicles. Then, considering the constraints of vehicle dynamics, the vehicle dynamics model and Brush tire model were established. Based on the tire lateral force data of the established vehicle model, the tire lateral stiffness was solved, and the magic tire model was used to verify the tire lateral stiffness. Next, the phase plane of sideslip angle and yaw rate was introduced to obtain the safe driving envelope of high-speed vehicle. CarSim simulation training was carried out on given multiple groups of vehicle speeds and adhesion coefficients to determine the shortest lane-changing time that meets the vehicle dynamics constraints. Finally, considering the collision avoidance constraints with surrounding traffic vehicles, three typical lane-changing scenarios were analyzed. The shortest and longest lane-changing durations satisfying the collision avoidance requirements were determined based on the position of single obstacle vehicle, and the threshold model of lane-changing duration satisfying the safe lane-changing requirements was established. The multi-parameter safety lane-changing domain test shows that the established vehicle safety lane-changing duration boundary model can solve the safe and feasible lane-changing trajectory under the given parameters, provide trajectory reference for the superhighway lane-changing behavior, and improve the safety of the superhighway lane-changing behavior.
In view of the problem that the subgrade soil is often regarded as a medium with deterministic parameters in the traffic safety analysis of high-speed railway in subgrade section. In this paper, based on the stochastic field theory, subgrade soil was regarded as a three-dimensional medium with longitudinal uniformity, and a numerical model was established for a shield tunnel penetrating below an existing high-speed railway line. The parameter randomness of the subgrade soil cross section was simulated based on the number theory point selection method. In order to further explore the impact of a penetration shield tunnel on the safety of the existing high-speed railway, a 31-DOF vehicle model was established in this paper. Combined with the Fluent 3D fluid simulation software and dynamic grid technology, the aerodynamic load time history curve of high-speed train was obtained, and the derailment coefficient and probability density evolution information of trains at speeds of 300, 350 and 400 km/h were analyzed based on the probability density evolution theory. The results show that the existence of stochastic field makes the wheel weight reduction rate and derailment coefficient present a certain probability distribution range. The vertical wheel-rail force curve fluctuates obviously under the influence of the aerodynamic load and the subgrade deformation caused by the tunnel penetration. The maximum load reduction rate of wheel weight appears in the descending section on both sides of the maximum surface settlement. The vertical aerodynamic load is greater than the transverse aerodynamic load. With the increase of vehicle speed, the upper limits of wheel weight reduction rate and derailment coefficient are gradually increasing. In order to ensure the safety of intersecting trains, it is recommended that the running speed of high-speed trains under the shield tunneling should not exceed 300 km/h.
 2024Traffic Safety
2024Traffic Safety
