Journal of South China University of Technology(Natural Science Edition) ›› 2025, Vol. 53 ›› Issue (4): 102-112.doi: 10.12141/j.issn.1000-565X.240377
• Mechanical Engineering • Previous Articles Next Articles
Design and Disturbance Suppression of a Permanent Magnet Flexible Spherical Wrist Driven by Rotating Magnetic Coaxial Effect
ZHANG Yongshun, LIU Zhijun, LIU Zhenhu, WANG Li
- State Key Laboratory of High-Performance Precision Manufacturing,Dalian University of Technology,Dalian 116024,Liaoning,China
-
Received:2024-07-20Online:2025-04-25Published:2024-10-25 -
About author:张永顺(1965—),男,教授,博士生导师,主要从事机器人机电一体化研究。E-mail: zyshun@dlut.edu.cn -
Supported by:the National Natural Science Foundation of China(62173059)
CLC Number:
Cite this article
ZHANG Yongshun, LIU Zhijun, LIU Zhenhu, WANG Li. Design and Disturbance Suppression of a Permanent Magnet Flexible Spherical Wrist Driven by Rotating Magnetic Coaxial Effect[J]. Journal of South China University of Technology(Natural Science Edition), 2025, 53(4): 102-112.
share this article
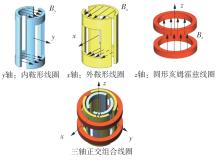
Fig.1
Schematic diagram of the superposition process of spatial universal rotating magnetic field"
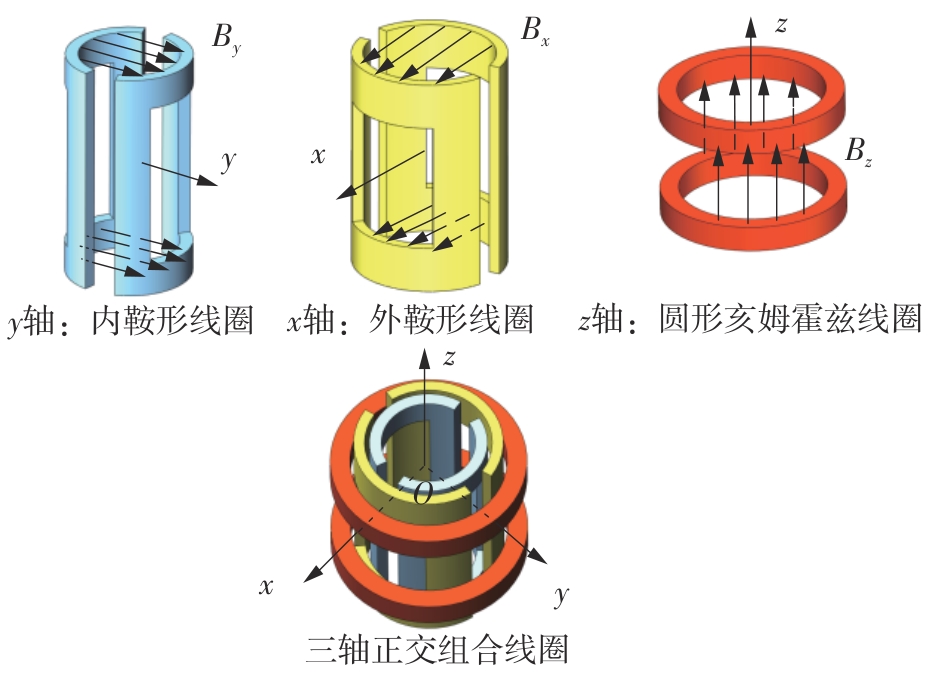
Table 1
Coil parameters"
| 线圈 | 裸线直径/mm | 线圈中心磁感应强度 B/mT | 线圈匝数N | 线圈电阻R/Ω | 线圈电感L/mH |
|---|---|---|---|---|---|
| 1 | 1.2 | 18 | 148 | 1.124 3 | 33.6 |
| 2 | 1.2 | 18 | 200 | 1.603 2 | 64.8 |
| 3 | 1.2 | 12 | 155 | 1.109 4 | 66.0 |
Fig.2
Schematic diagram of permanent magnet flexible spherical joint structure"
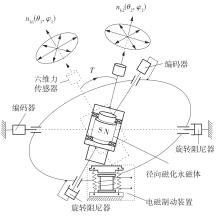
Fig.3
Schematic diagram of motion transmission of universal follow-up mechanism"
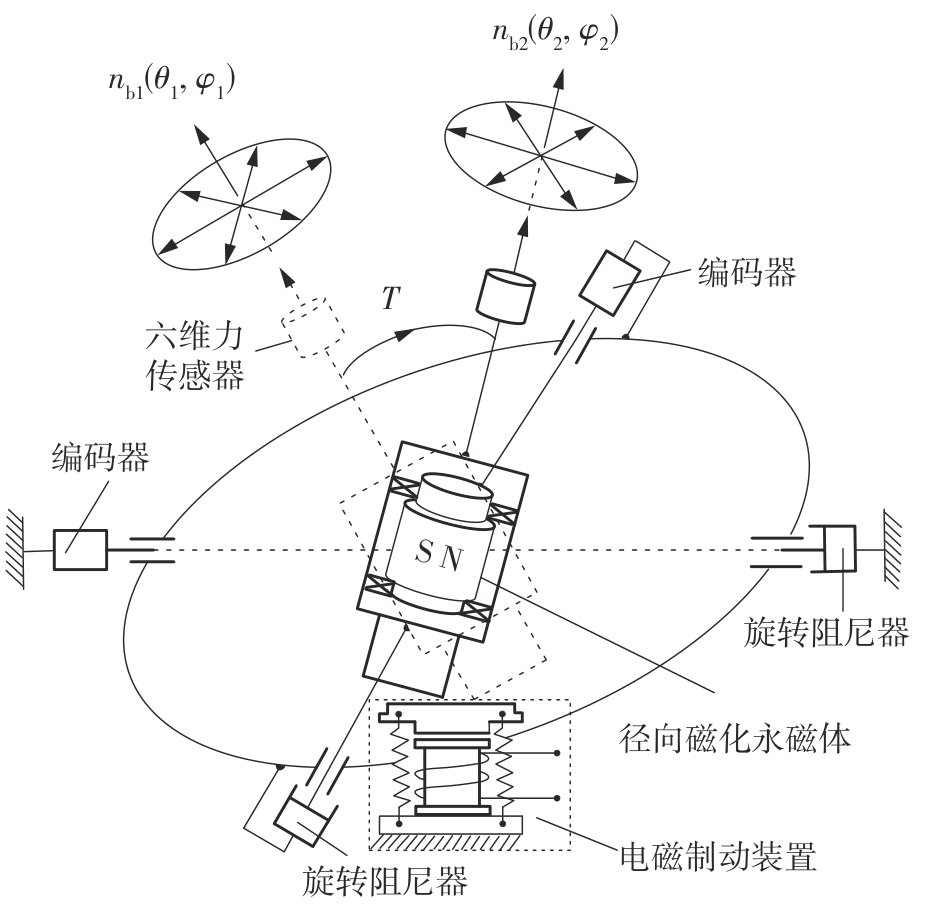
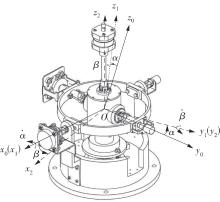
Fig.4
Coordinate conversion process"
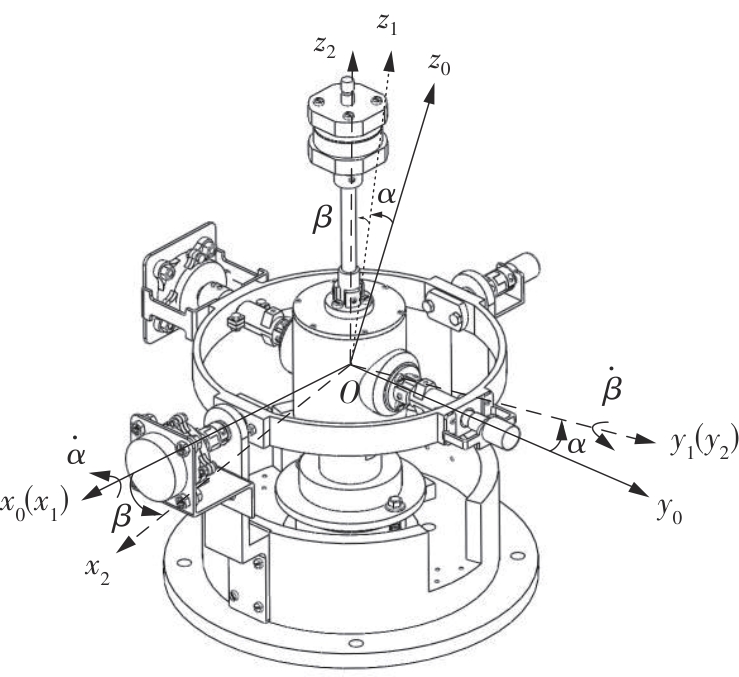
Table 2
Dynamic model parameters"
| 参数 | 数值 |
|---|---|
| x轴转动惯量Jx /(kg·m2) | 0.167 5×10-2 |
| y轴转动惯量Jy /(kg·m2) | 0.214 9×10-2 |
| z轴转动惯量Jz /(kg·m2) | 0.102 9×10-2 |
| 永磁体绕z轴转动惯量Jz2/(kg·m2) | 0.002 2×10-2 |
| 永磁体磁矢量幅值m0/(A·m-2) | 127.2 |
| 阻尼系数k | 0.2 |
| 转差角δ/rad | π/24 |
| 负载m/kg | 1 |
| 负载到磁铁旋转中心距离r/m | 0.1 |
Table 3
Fuzzy rule table"
| NB | NS | ZO | PS | PB | |
|---|---|---|---|---|---|
| NB | PB | PM | PS | NS | NM |
| NS | PM | PS | PM | NS | NS |
| ZO | PS | PS | ZO | ZO | NS |
| PS | PS | NS | NS | NS | NM |
| PB | NS | NM | NS | NM | NB |
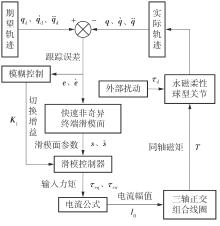
Fig.5
System control structure diagram"
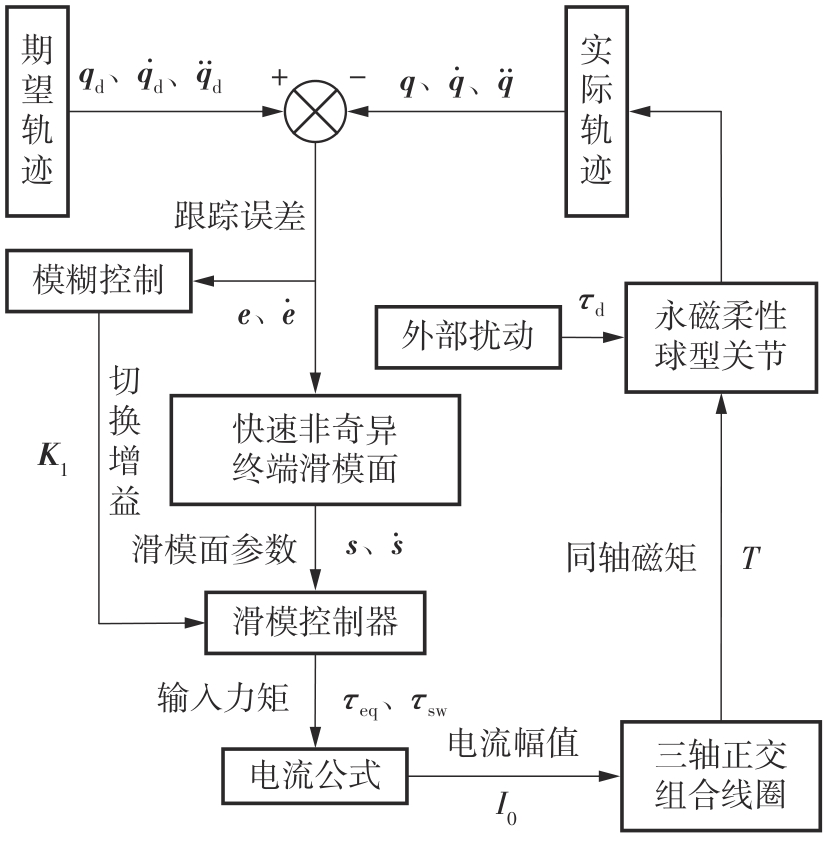

Fig.6
Angular tracking before and after optimization"
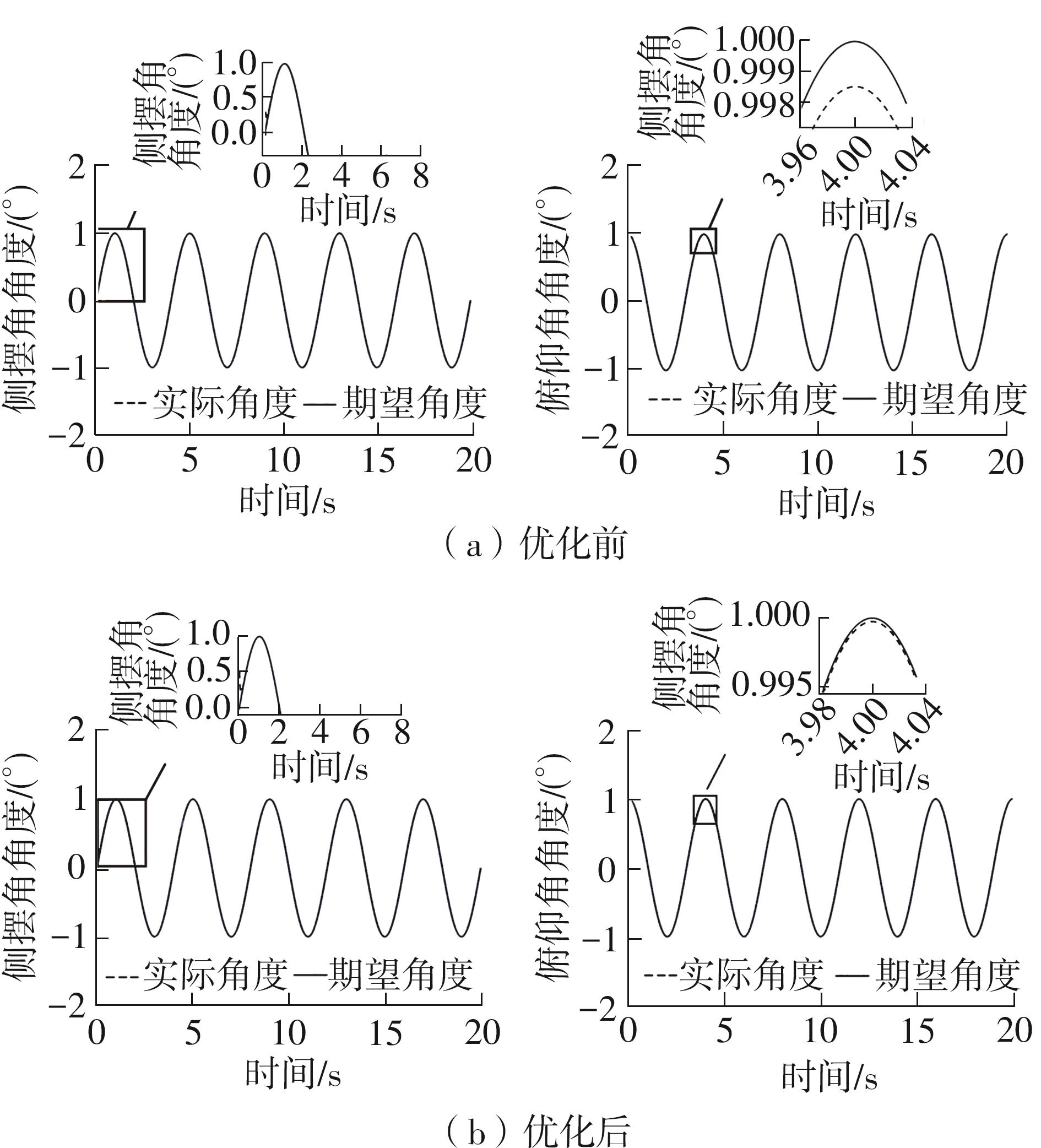

Fig.7
Angular velocity tracking before and after optimization"
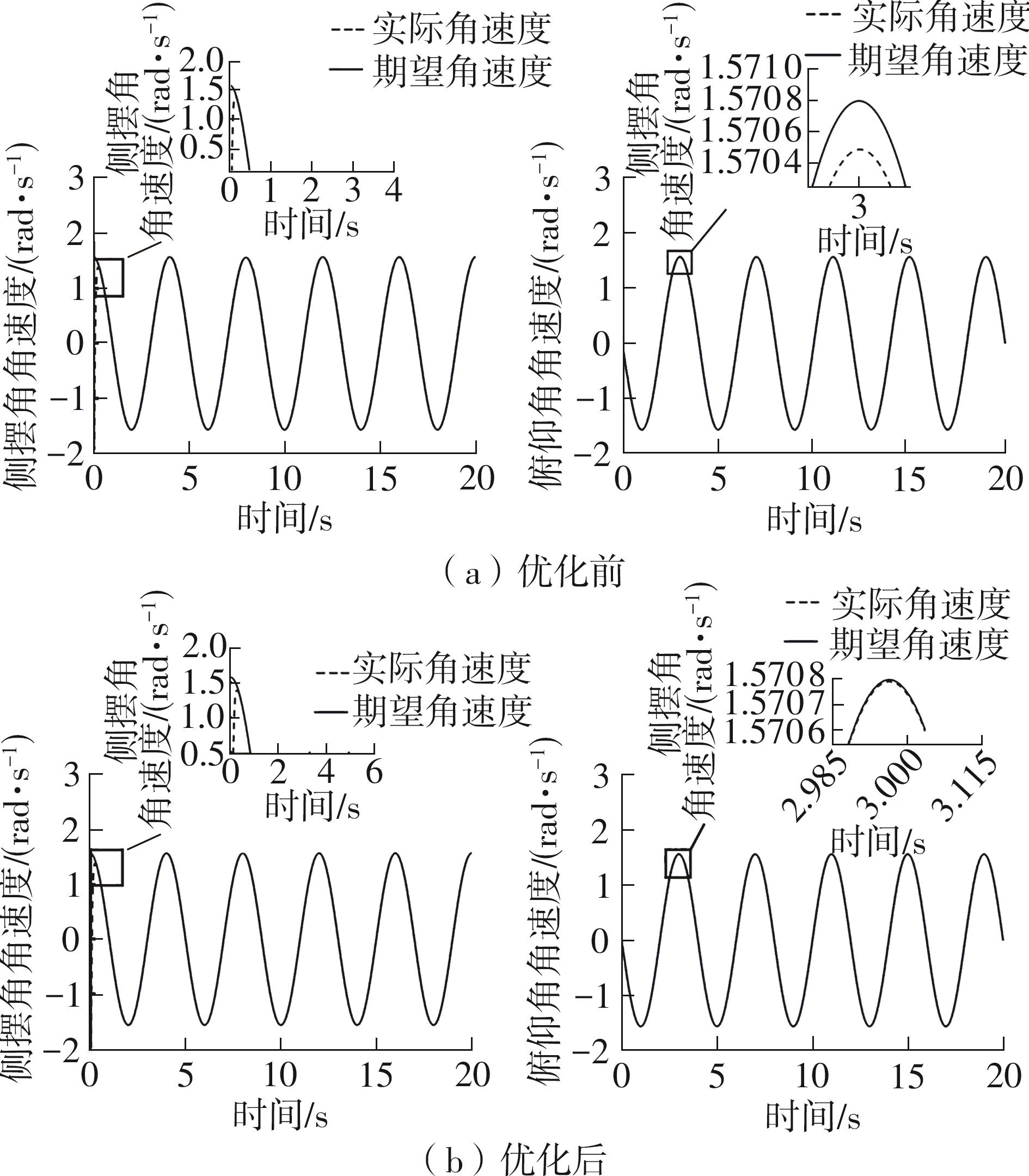

Fig.8
Control input curves before and after optimization"
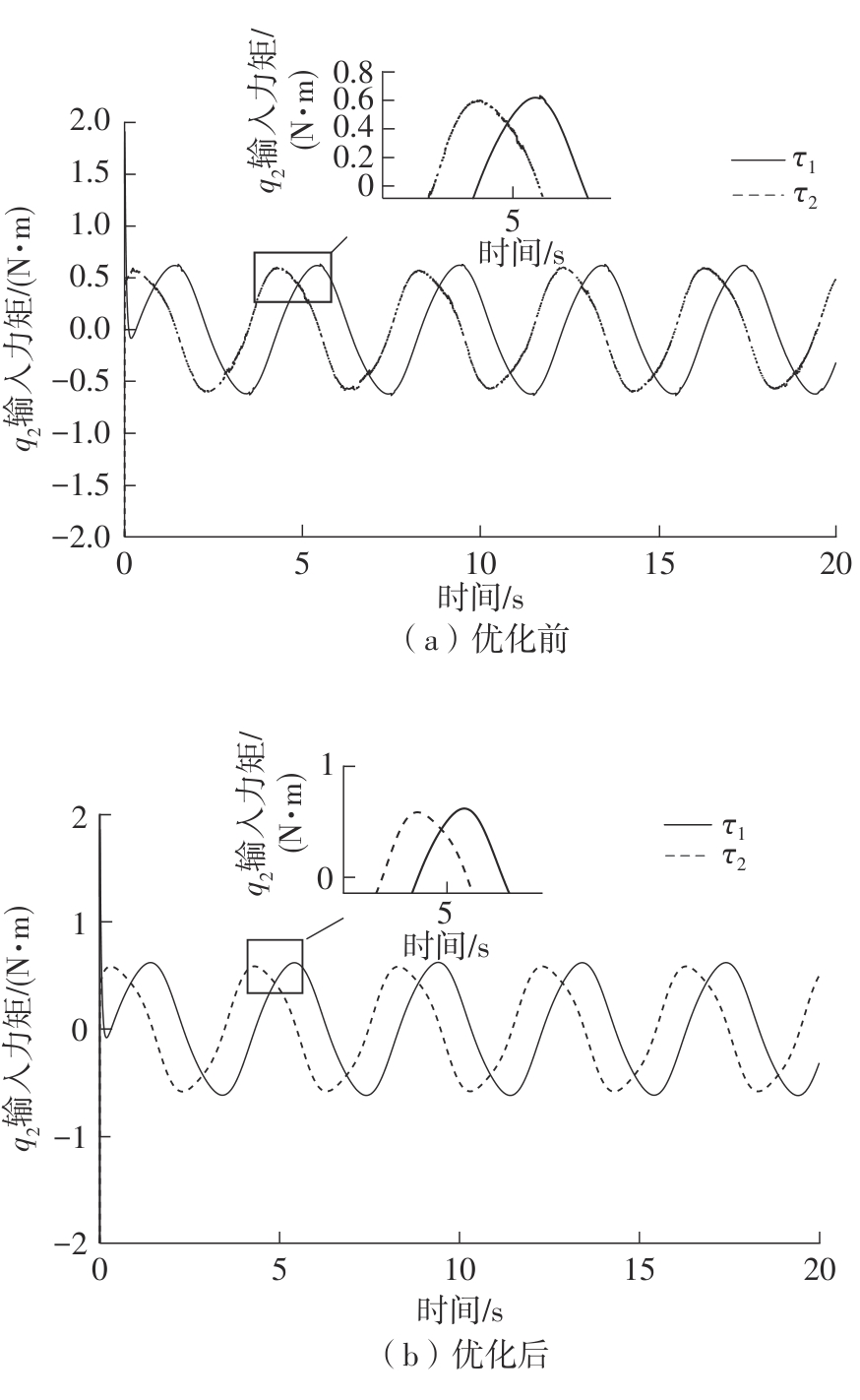
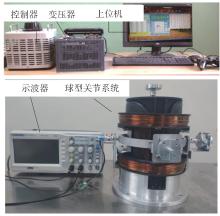
Fig.9
Spherical joint trajectory tracking test platform"
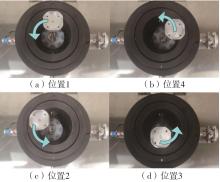
Fig.10
Circular trajectory test process"
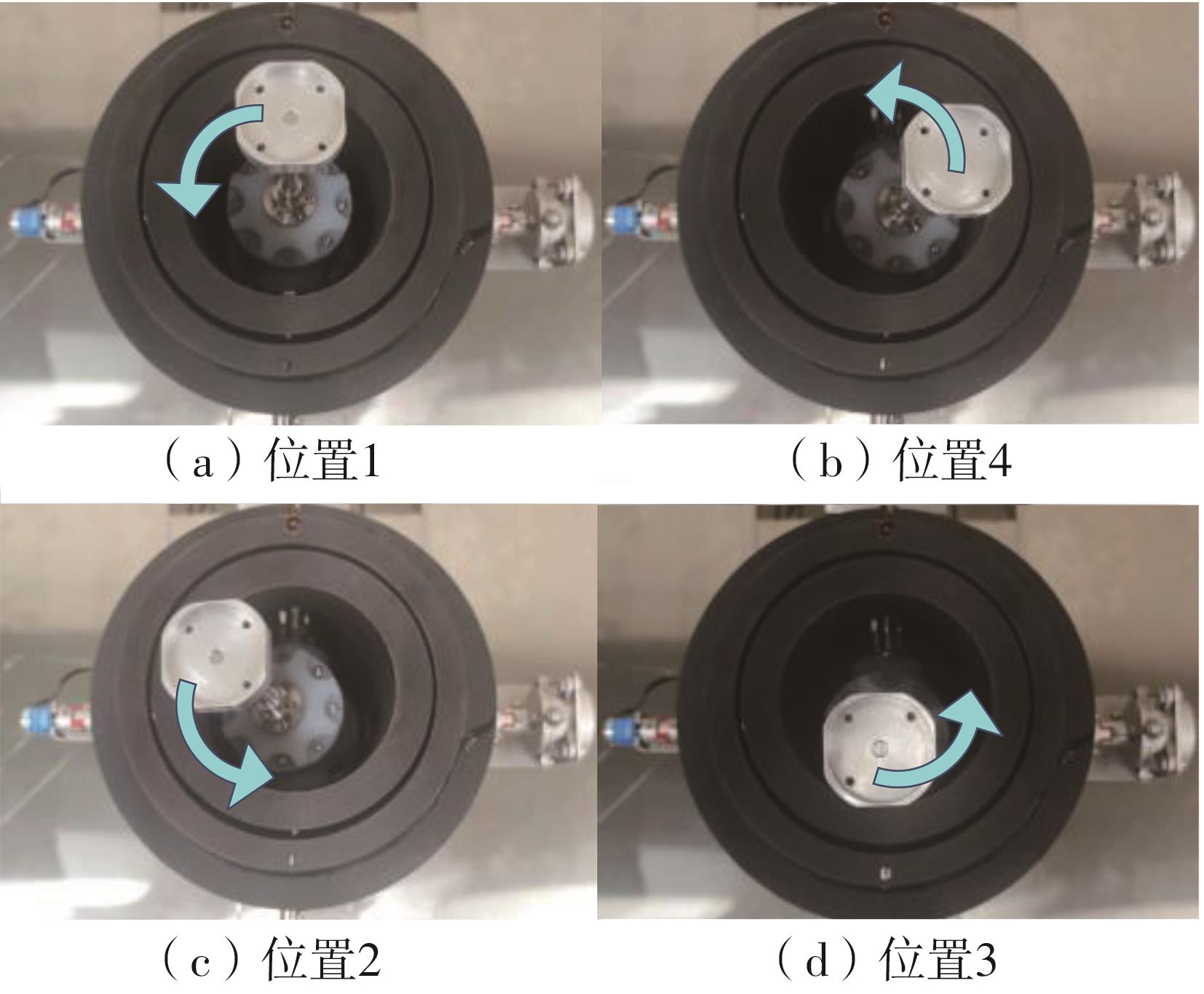
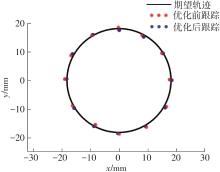
Fig.11
Circular trajectory tracking experiment"
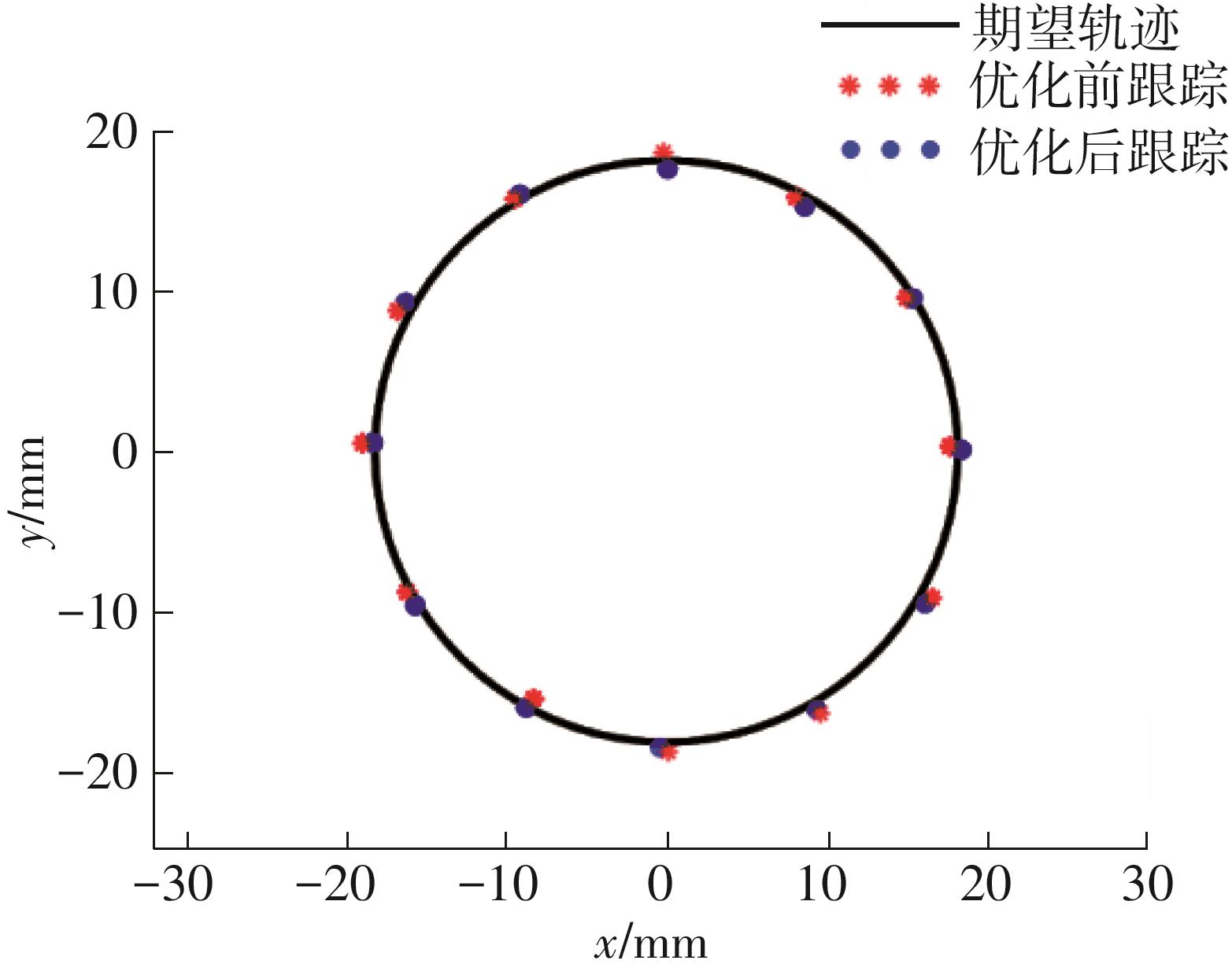

Fig.12
Curves of yaw and pitch angle variation with latitude angle"
| 1 | BAI K, XU R, LEE K M, et al .Design and development of a spherical motor for conformal printing of curved electronics[J].IEEE Transactions on Industrial Electronics, 2018,65(11): 9190-9200. |
| 2 | CHO S Y, LIM J S, OH Y J,et al .A study on output characteristics of the spherical multi-DOF motor according to the number of phases and pole pitch angles[J].IEEE Transactions on Magnetics,2018,54(11): 8205005/1-5. |
| 3 | GÜNDOGAR U Y, PARTAL S Z .Design, 3D FEM simulation and prototyping of a permanent magnet spherical motor[J].Actuators, 2021,10:305/1-18. |
| 4 | GAN L, PEI Y L, CHAI F .Tilting torque calculation of a novel tiered type permanent magnet spherical motor[J].IEEE Transactions on Industrial Electronics,2020,67(1): 421-431. |
| 5 | PARK J, KIM M, JANG H G,et al .Design and control of a permanent magnet spherical wheel motor[J].ETRI Journal, 2019,41(6): 838-849. |
| 6 | ZHANG Y S, WANG D L, YANG Z Q,et al .Electromagnetic drive spherical robotic wrist with two degrees of freedom and control method therefor:US 11446814B2[P].2022-09-20. |
| 7 | YAO X, PARK H, DONG H,et al .Robust adaptive nonsingular terminal sliding mode control for automatic train operation[J].IEEE Transactions on Systems,Man, and Cybernetics:Systems,2019,49(12):2406-2415. |
| 8 | YI S, ZHAI J .Adaptive second-order fast nonsingular terminal sliding mode control for robotic manipulators[J].ISA Transactions,2019,90: 41-51. |
| 9 | SPURGEON S .Sliding mode observers: a survey[J].International Journal of Systems Science,2008,39(8):751-764. |
| 10 | DONG L, YU D, NGUANG S .Novel nonsingular terminal sliding mode control for multi-agent tracking systems with application to jerk circuit[J].IEEE Transactions on Circuits and Systems Ⅱ-Express Briefs, 2020,67(8):1429-1433. |
| 11 | 杨光宇,陈思溢,黄辉先 .基于干扰观测器的解耦快速终端滑模控制[J].控制工程,2022,29(1):61-69. |
| YANG Guang-yu, CHEN Si-yi, HUANG Hui-xian .Decoupled fast terminal sliding mode control based on disturbance observer[J].Control Engineering of China,2022, 29(1): 61-69. | |
| 12 | TUAN L A, HA Q P .Adaptive fractional-order integral fast terminal sliding mode and fault-tolerant control of dual-arm robots[J].Robotica,2024, 42(5):1476-1499. |
| 13 | TRAN D T, TRUONG H V A, AHN K K .Adaptive nonsingular fast terminal sliding mode control of robotic manipulator based neural network approach[J].International Journal of Precision Engineering and Manufacturing, 2021, 22(3):417-429. |
| 14 | 于子淳 .基于独立变量的空间万向旋转磁场正交变换操作原理[D].大连:大连理工大学, 2017. |
| 15 | ZHANG Y S, CHI M L, SU Z K .Critical coupling magnetic moment of a petal-shaped capsule robot[J].IEEE Transactions on Magnetics,2016,52(1):5000109/1-19. |
| 16 | 李浚哲 .自旋导弹控制方法研究[D].长沙:国防科学技术大学, 2014. |
| 17 | 张永顺, 刘高仁, 刘志军,等 .一种阻尼可调的叶片式双向旋转阻尼器: CN116658558A[P].2023-08-29. |
| 18 | 吴绍华 .基于终端滑模控制的机械臂轨迹跟踪[D].天津:天津大学, 2018. |
| 19 | ZHANG Y Q, YIN Z G, ZHANG Y P,et al .A novel sliding mode observer with optimized constant rate reaching law for sensorless control of induction motor[J].IEEE Transactions on Industrial Electronics,2020,67(7):5867-5878. |
| 20 | 刘爽 .永磁同步电机伺服系统的自适应模糊控制研究[D].哈尔滨:哈尔滨工业大学, 2018. |
| [1] | WEN Shengping, SU Yilong, QU Hongyi. Design of a Cascade Controller of Trajectory Tracking for Omnidirectional AGV Driven by Mecanum Wheels [J]. Journal of South China University of Technology(Natural Science Edition), 2025, 53(1): 49-61. |
| [2] | NING Jun, MA Yifan, LI Wei, et al. Adaptive Fuzzy Tracking Control of Unmanned Surface Vehicle with State and Input Quantization [J]. Journal of South China University of Technology(Natural Science Edition), 2024, 52(5): 52-61. |
| [3] | CHEN Zhong, QIU Yuliang, ZHANG Xianmin. Optimization Design and Experiment of XY Compliant Platform with Local Resonance Damping [J]. Journal of South China University of Technology(Natural Science Edition), 2024, 52(12): 1-13. |
| [4] | LI Xinkai, HU Xiaocheng, MA Ping, et al.. Driverless Obstacle Avoidance and Tracking Control Based on Improved DDPG [J]. Journal of South China University of Technology(Natural Science Edition), 2023, 51(11): 44-55. |
| [5] | LIN Yongjie, CHEN Ning, LU Kai. Vehicle Trajectory Tracking at Intersections Based on Millimeter Wave Radar Point Cloud [J]. Journal of South China University of Technology(Natural Science Edition), 2023, 51(10): 110-125. |
| [6] | WANG Chengwen, GUO Xinping, ZHANG Zhenyang, et al. Intelligent Control Method for Pump-Valve Parallel Electro-Hydraulic Position Servo System [J]. Journal of South China University of Technology (Natural Science Edition), 2021, 49(3): 25-33. |
| [7] | LUO Yutao, GUO Haiwen. Adaptive Neural Network Sliding Mode Control for Steer-by-Wire System [J]. Journal of South China University of Technology (Natural Science Edition), 2021, 49(1): 65-73. |
| [8] | QIN Wu, KANG Yingzi, SHANGGUAN Wenbin, et al. Study on Sliding Mode Control with Disturbance Observer Integrating Skyhook Model for Active Suspension Systems [J]. Journal of South China University of Technology (Natural Science Edition), 2020, 48(6): 16-24,33. |
| [9] | Wang Zhao-dong Wen Xiao-qin You Lin-ru Zeng Wen-tao. Sensorless High-Performance Control of IPMSM Within Wide Speed Range [J]. Journal of South China University of Technology (Natural Science Edition), 2015, 43(9): 1-7. |
| [10] | Li Lin Ren Jun- lin Zou Yan- biao Lu Zhou. Trajectory Tracking of Mobile Robot Based on Immune Genetic Algorithm [J]. Journal of South China University of Technology (Natural Science Edition), 2013, 41(7): 13-18,25. |
| [11] | He Yue-bang Pei Hai-long Ye Xiang Zhang Qian. Trajectory Tracking Control of Unmanned Helicopters by Using Adaptive Dynamic Surface Approach [J]. Journal of South China University of Technology (Natural Science Edition), 2013, 41(5): 1-8. |
| [12] | He Yue-bang Pei Hai-long Zhao Yun-ji Li Jian-qiang. Flight Control Design of Unmanned Helicopter Based on Robust Integral Filtering Backstepping [J]. Journal of South China University of Technology (Natural Science Edition), 2013, 41(2): 30-36. |
| [13] | Zhang Bi-tao Pi You-guo. Control of Permanent Magnet Synchronous Motor Based on Fuzzy Fractional-Order Sliding Mode Control [J]. Journal of South China University of Technology(Natural Science Edition), 2012, 40(3): 126-130. |
| [14] | Zhai Jing-mei Kang Bo Tang Hui-hua. Adaptive Fuzzy Variable Structure Control Algorithm for Trajectory Tracking of Industrial Robots [J]. Journal of South China University of Technology(Natural Science Edition), 2012, 40(12): 12-16,23. |
| [15] | Ye Jin-hua Li Di Ye Feng Lai Yi-zong. Adaptive Backstepping Sliding Mode Control of Uncertain Nonholonomic AGV [J]. Journal of South China University of Technology(Natural Science Edition), 2011, 39(12): 32-37,43. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||