Journal of South China University of Technology(Natural Science Edition) ›› 2022, Vol. 50 ›› Issue (10): 132-139.doi: 10.12141/j.issn.1000-565X.220164
Special Issue: 2022年流体动力与机电控制工程
• Fluid Power & Electromechanical Control Engineering • Previous Articles Next Articles
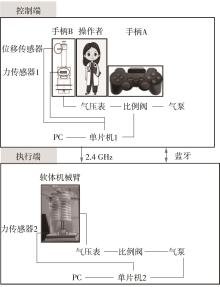
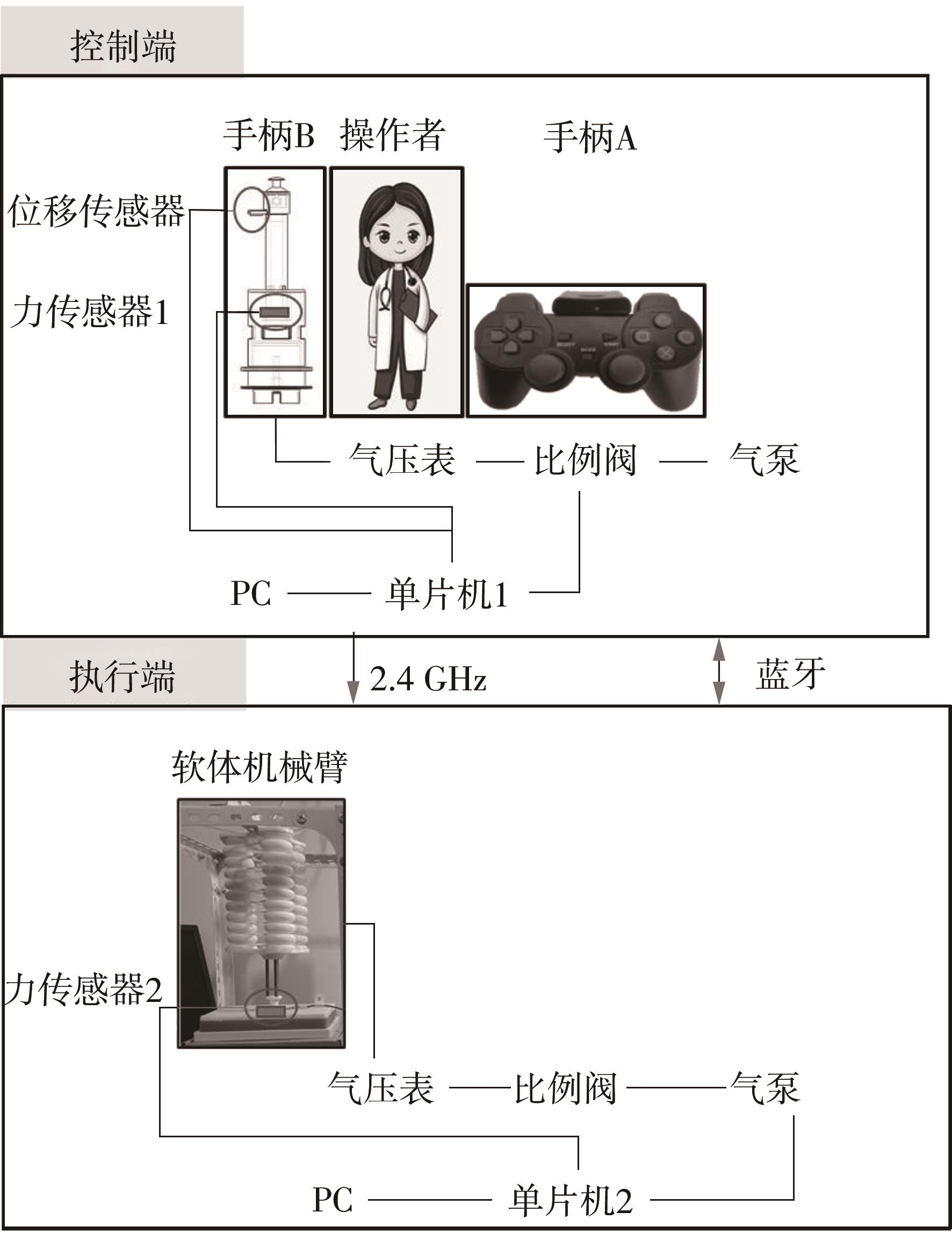
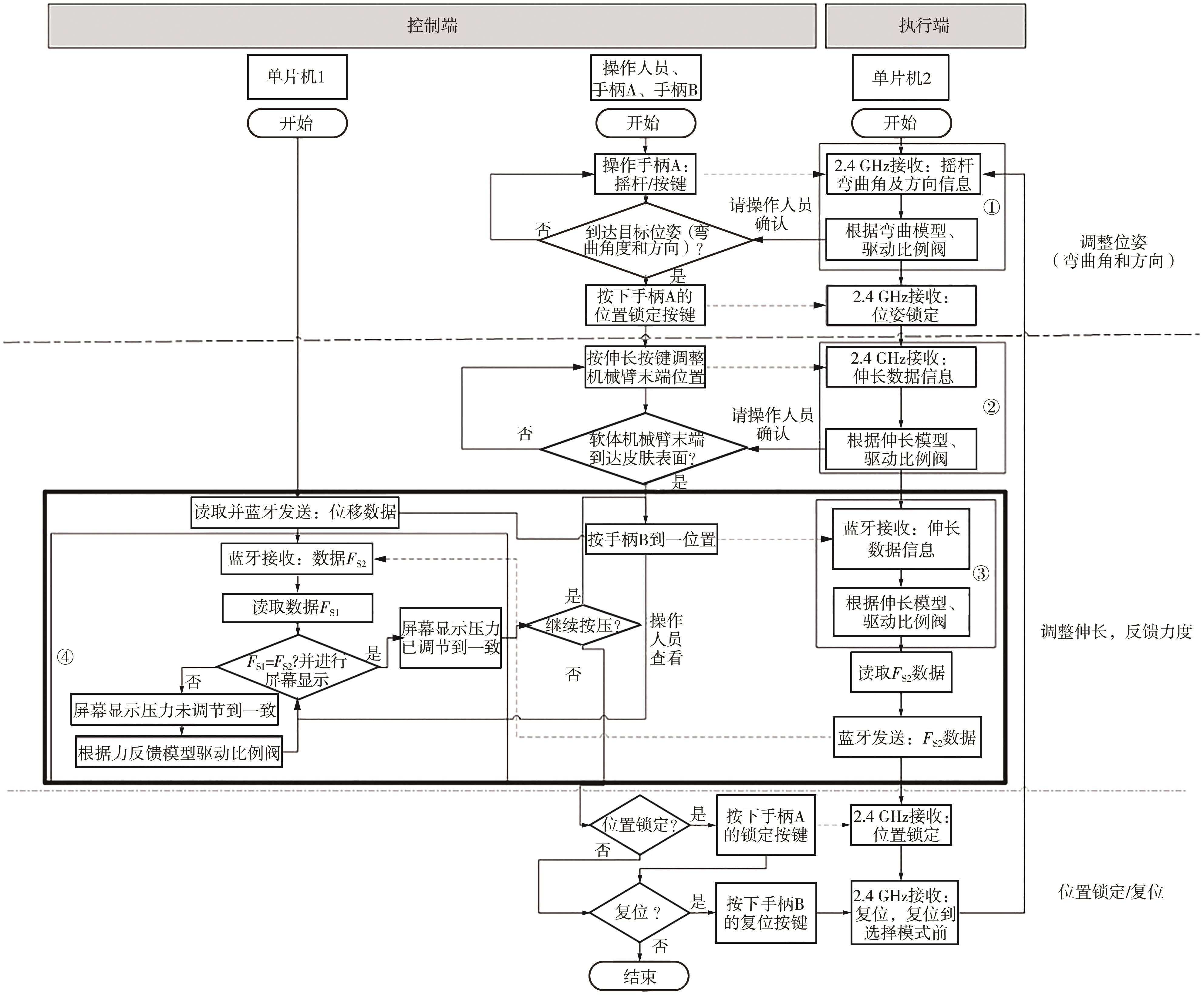
Research on Teleoperation and End Force Feedback System of Soft Actuator
ZHOU Junjie1 ZHANG Lingyu1 YU Yang2 ZHANG Jian1 MA Huichen1
- 1.School of Mechanical Engineering,Beijing Institute of Technology,Beijing 100081,China
2.Department of Anesthesiology,Fuwai Hospital,Chinese Academy of Medical Sciences & Peking Union Medical College,Beijing 100037,China