Journal of South China University of Technology(Natural Science Edition) ›› 2022, Vol. 50 ›› Issue (10): 140-152.doi: 10.12141/j.issn.1000-565X.220274
Special Issue: 2022年流体动力与机电控制工程
• Fluid Power & Electromechanical Control Engineering • Previous Articles
Terminal Force Soft Sensing of Hydraulic Manipulator Based on Joint Torque Compensation
LI Gang LI Feng DING Ruqi MU Xueshan
- Nanchang Key Laboratory of Vehicle Intelligent Equipment and Control/School of Mechatronics and Vehicle,East China Jiaotong University,Nanchang 330013,Jiangxi,China
-
Received:2022-05-12Online:2022-10-25Published:2022-09-01 -
Contact:周俊杰(1986-),男,博士,副教授,主要从事软体机器人和流体传动与控制研究。 E-mail:dingruqi@ecjtu.edu.cn -
About author:李刚(1978-),男,博士,副教授,主要从事电液控制及智能装备研究。E-mail:ligang0794@163.com. -
Supported by:the National Natural Science Foundation of China(52175050);the Regional Innovation and Deve-lopment Joint Funds of the National Natural Science Foundation of China(U21A20124);the Natural Science Foundation of Jiangxi Province(20212ACB214004)
CLC Number:
Cite this article
LI Gang, LI Feng, DING Ruqi, et al. Terminal Force Soft Sensing of Hydraulic Manipulator Based on Joint Torque Compensation[J]. Journal of South China University of Technology(Natural Science Edition), 2022, 50(10): 140-152.
share this article
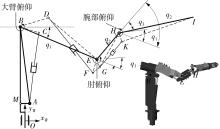
Fig.1
3-DOF hydraulic manipulator kinematics modeling diagram"
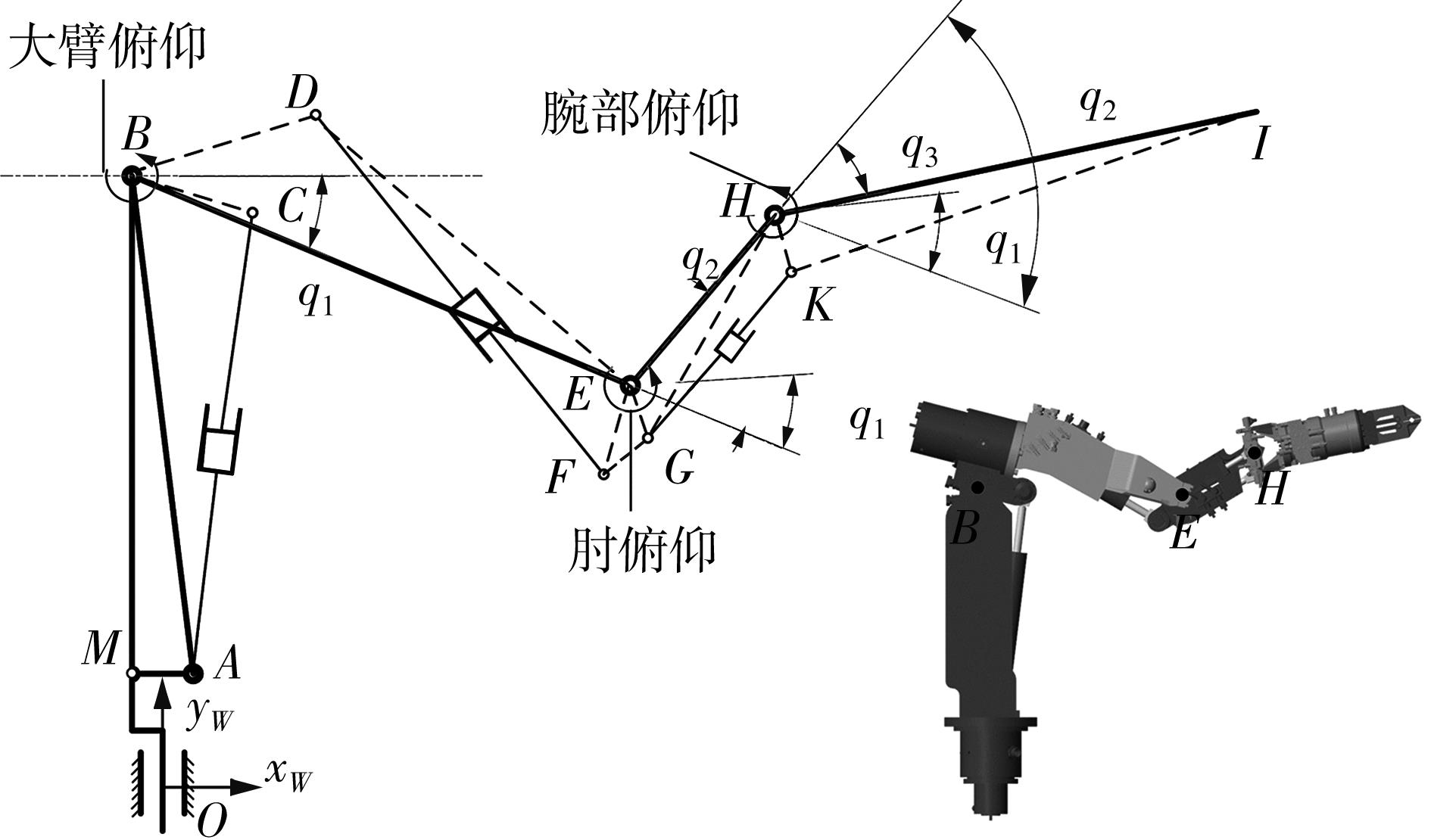
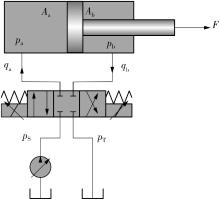
Fig.2
Hydraulic cylinder driving force schematic diagram"
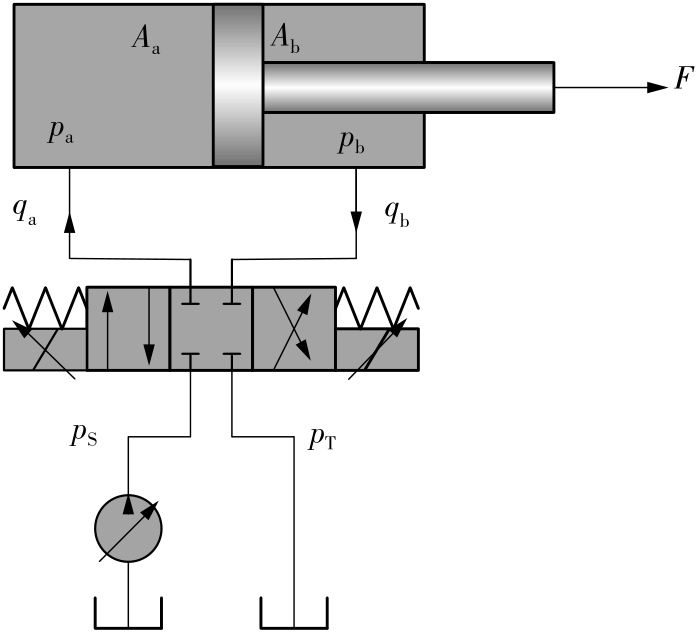
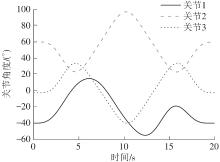
Fig.3
Joint angles under the excitation trajectory of hydraulic manipulator"
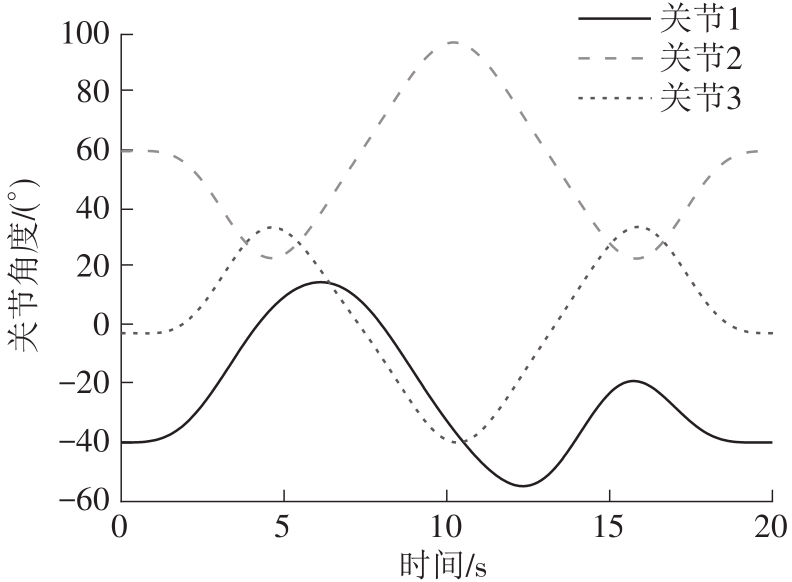
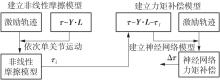
Fig.4
Establishment of joint torque compensation model"
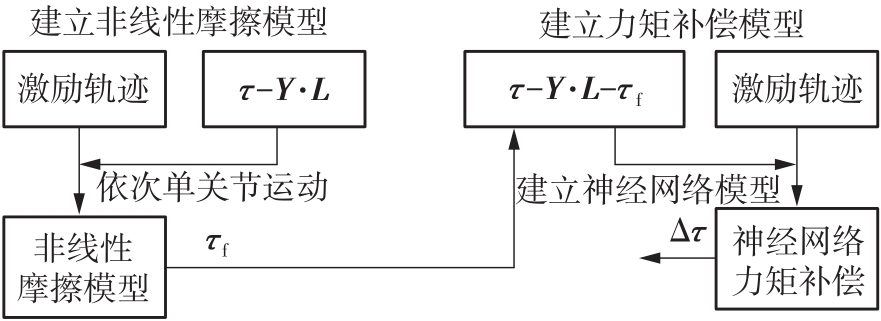
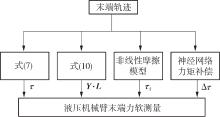
Fig.5
Schematic diagram of terminal force soft sensing of hydraulic manipulator"
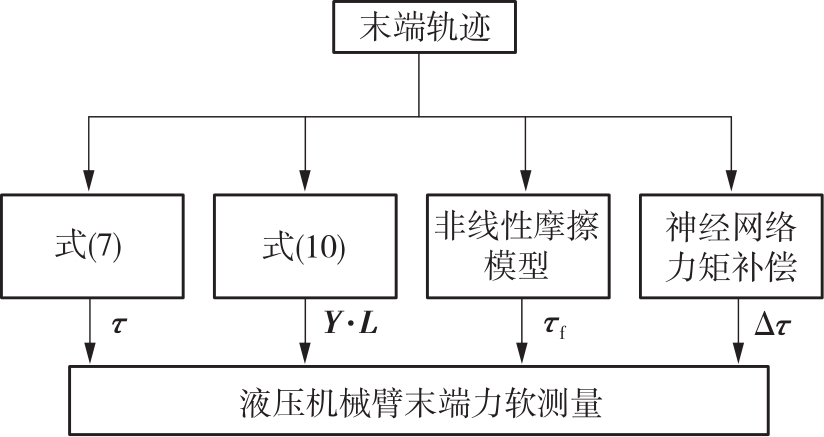
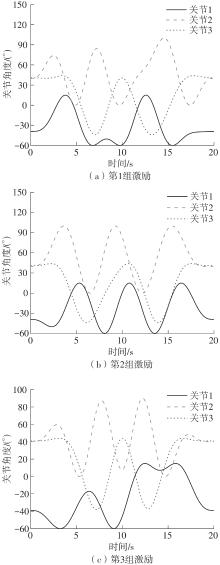
Fig.6
Three sets of excitation trajectories for friction torque fitting"
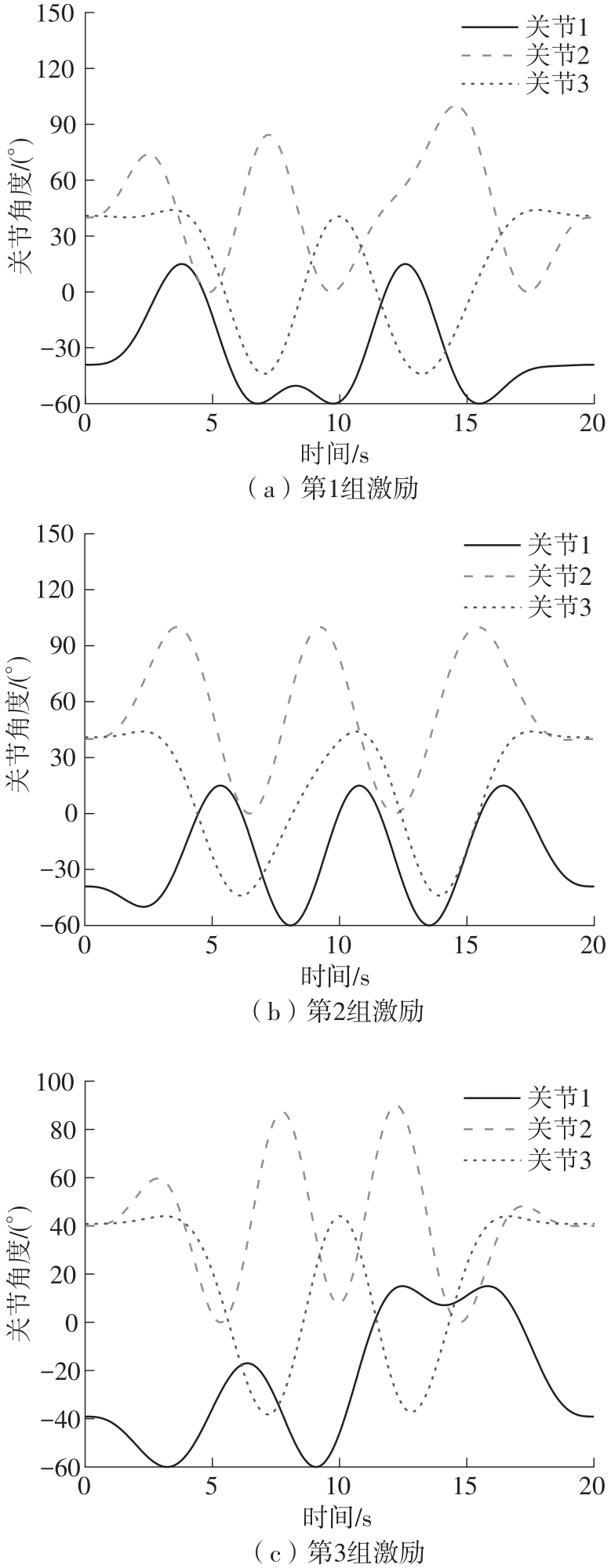
Table 1
Friction torque model coefficients of each joint"
| 关节 | k1 | k2 | k3 | k4 | k5 | k6 | k7 | k8 |
|---|---|---|---|---|---|---|---|---|
| 关节1 | -807.3 | 3 162 | 368.7 | -838.2 | -242 | -35.22 | 158.3 | -2376 |
| 关节2 | -34.62 | 11.79 | -36.98 | 1.33 | 0.82 | 109.8 | 0.34 | 5.39 |
| 关节3 | -19.46 | 40.05 | -5.42 | -13.72 | 0.45 | 18.67 | 0.17 | -17.95 |
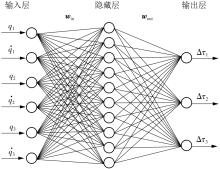
Fig.7
Neural network torque compensation model"
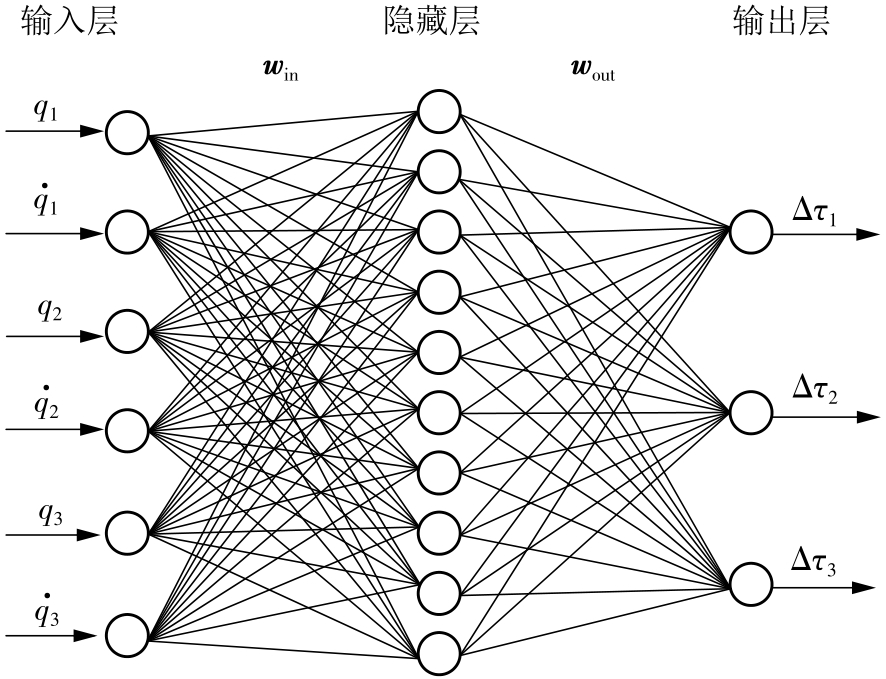
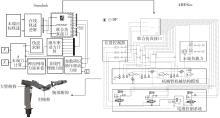
Fig.8
AMESim/Simulink joint simulation model for terminal force soft sensing of hydraulic manipulator"
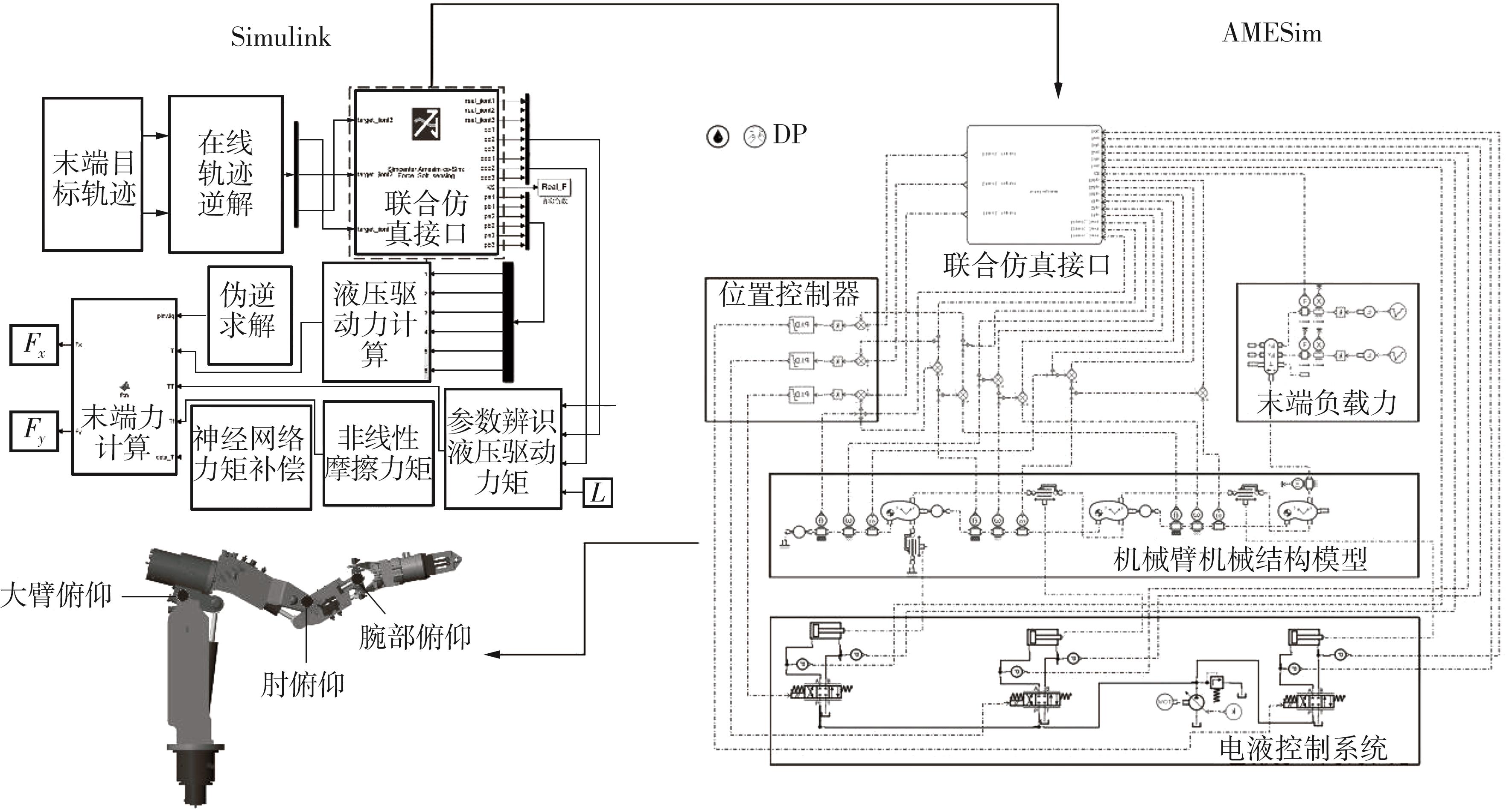

Fig.9
Triangular trajectory diagram of force soft sensor"
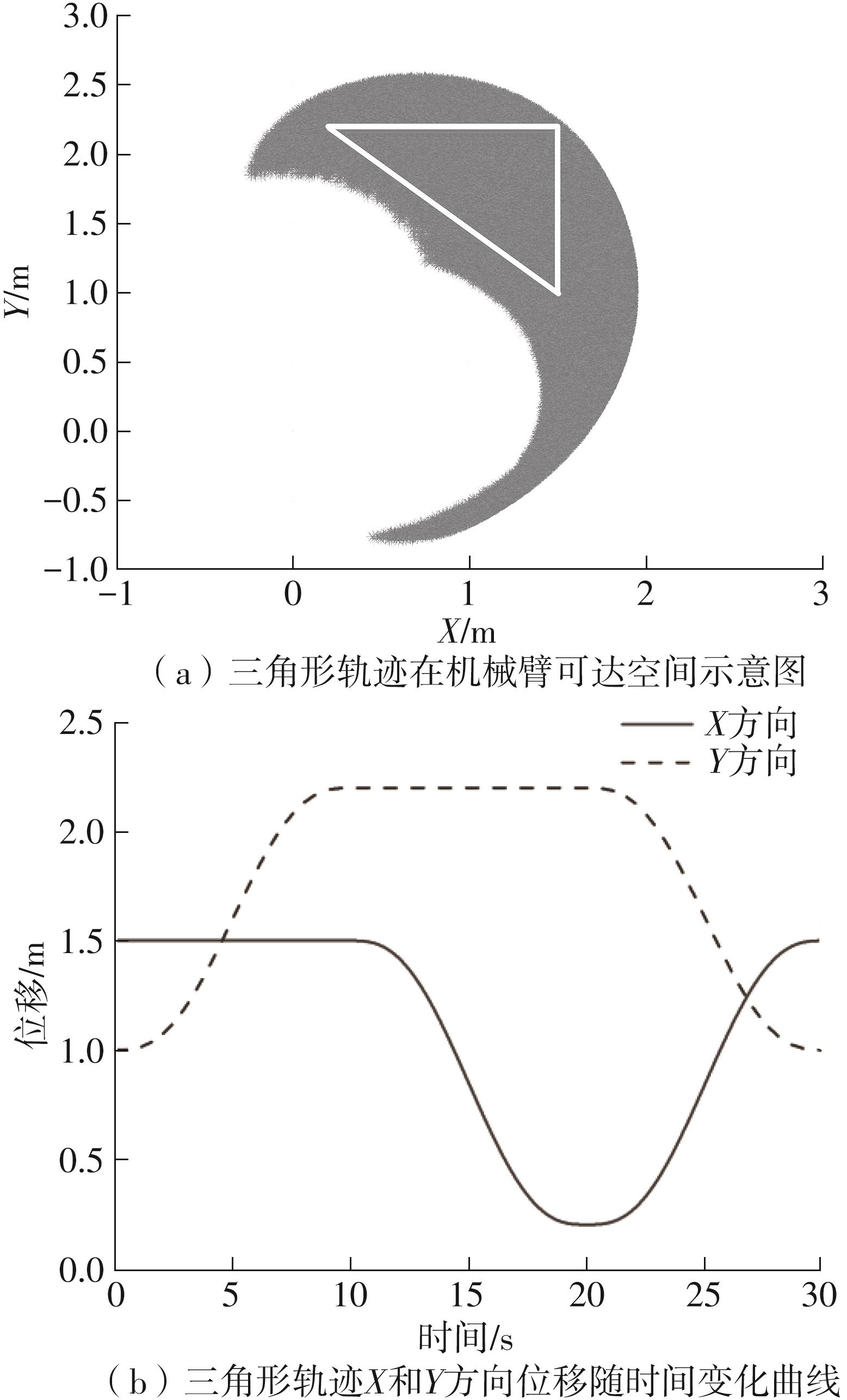
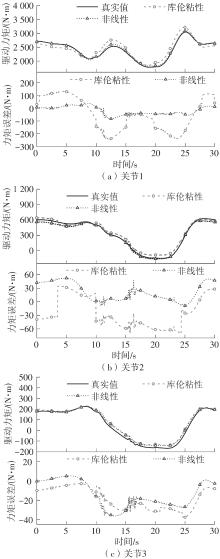
Fig.10
Comparison of joint torques between two dynamics models under triangular trajectory"
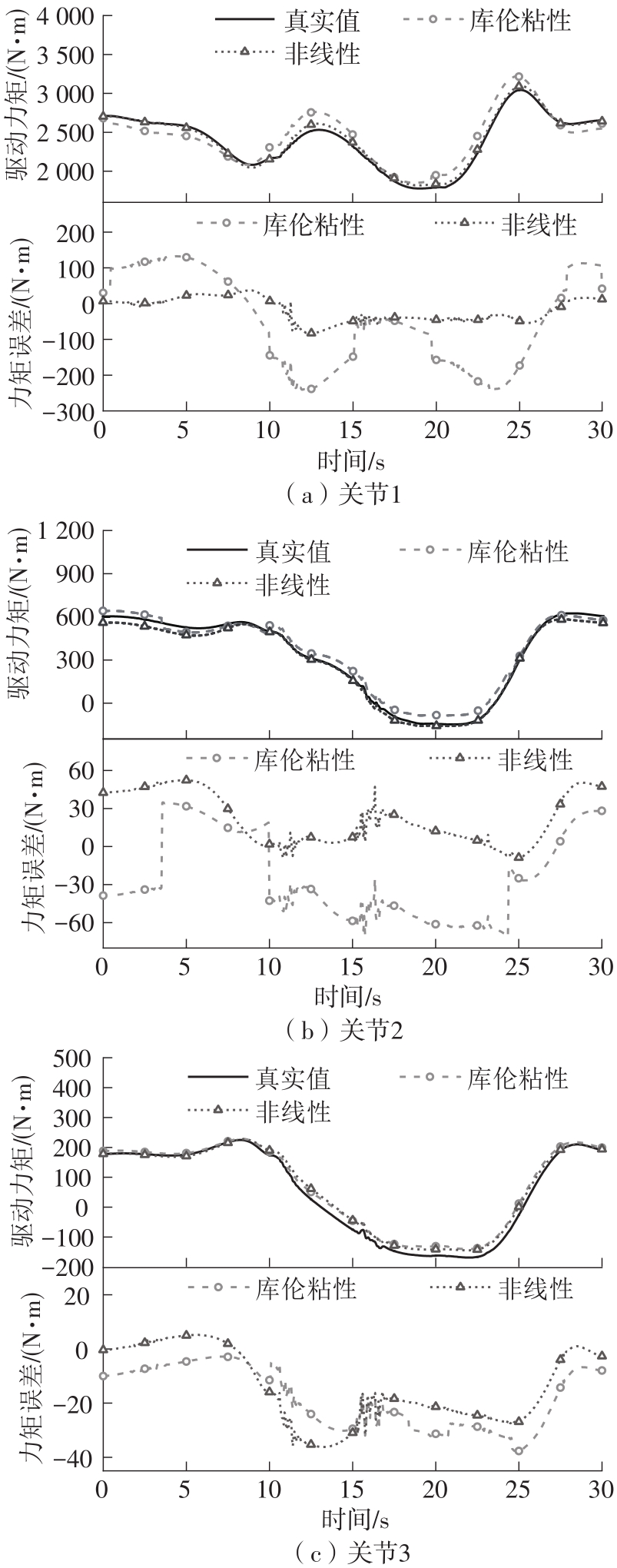
Table 2
RMES of “Coulomb Stickiness” and “Nonlinear” of each joint of manipulator"
| 关节 | RMES/(N·m) | |
|---|---|---|
| 库伦粘性 | 非线性 | |
| 关节1 | 138.04 | 38.33 |
| 关节2 | 41.87 | 29.22 |
| 关节3 | 21.44 | 19.58 |
Fig.11
Comparison of joint torques and torque errors with and without neural network torque compensation under triangular trajectory"
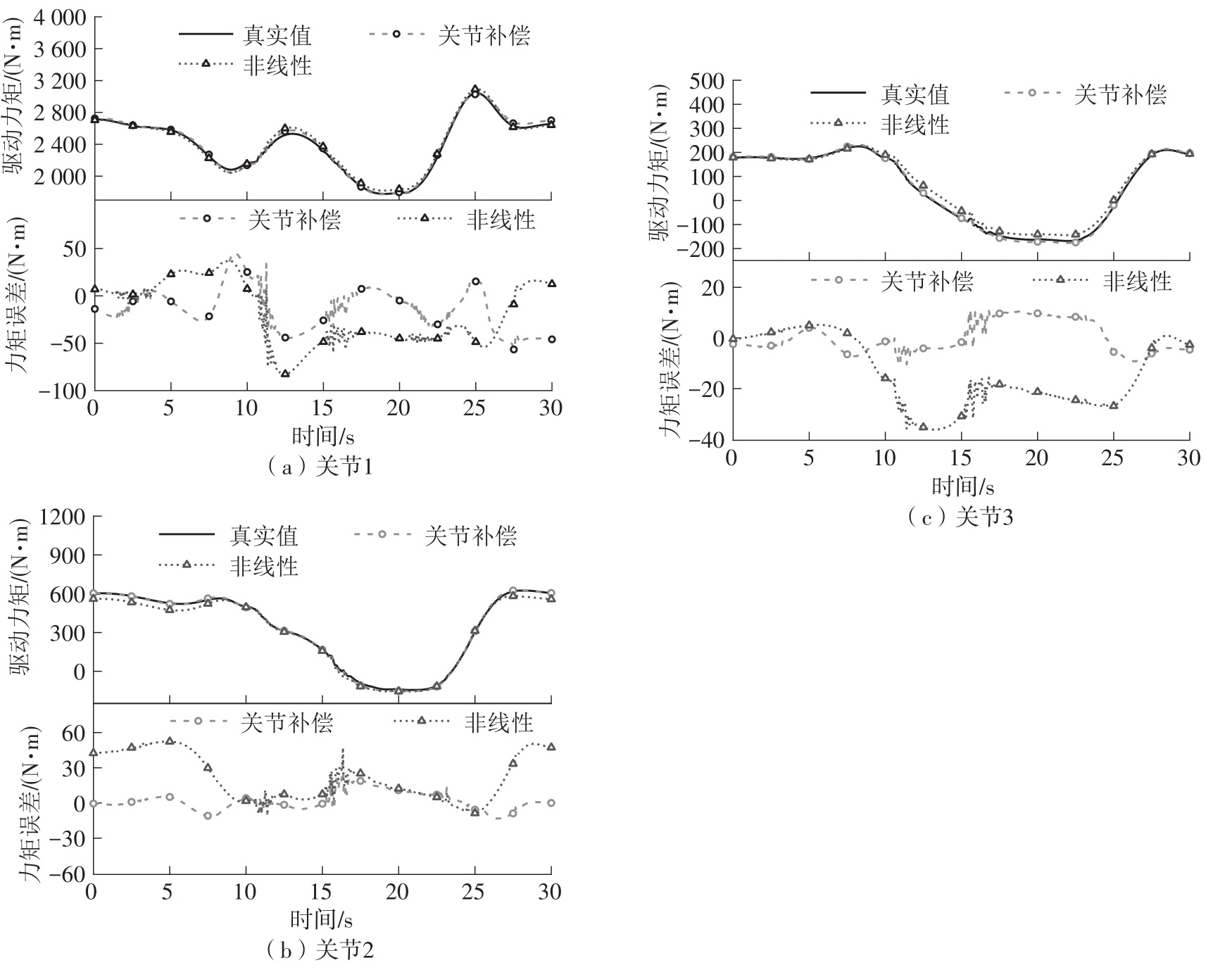
Table 3
RMES of “Nonlinear” and “Joint Compensation” of each joint of manipulator"
| 关节 | RMES/(N·m) | |
|---|---|---|
| 非线性 | 关节补偿 | |
| 关节1 | 38.33 | 26.30 |
| 关节2 | 29.22 | 8.16 |
| 关节3 | 19.58 | 6.10 |

Fig.12
Soft-sensing result of terminal force in horizontal direction"
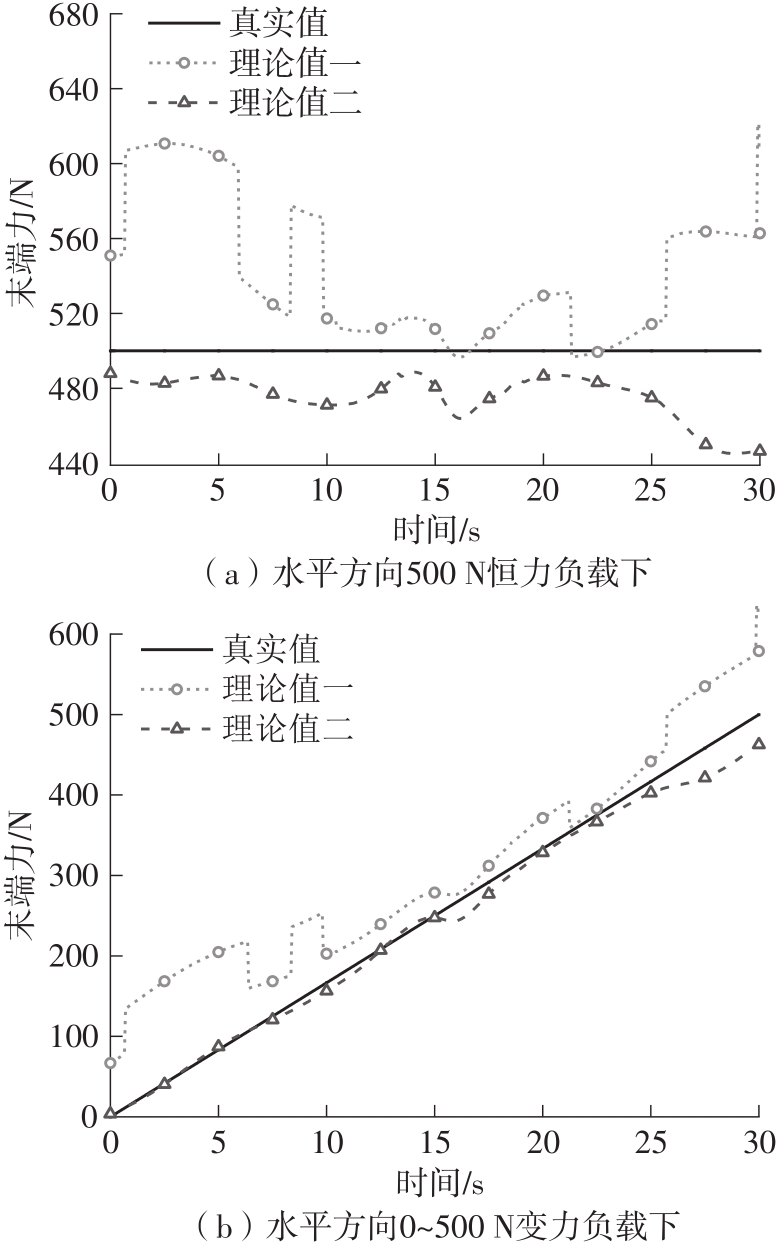

Fig.13
Soft-sensing result of terminal force in vertical direction"
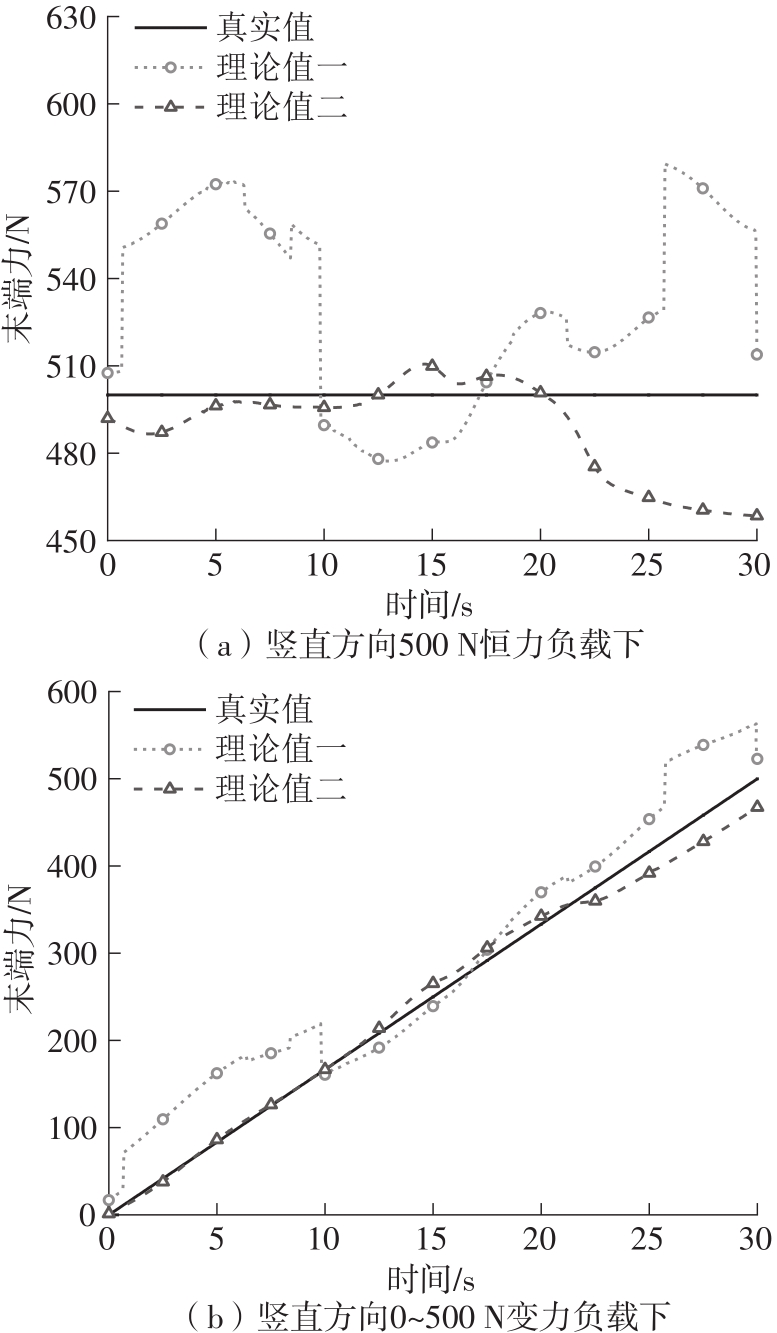
Table 4
MAPE of soft sensing simulation results of terminal force of hydraulic manipulator"
| 受力方向及大小 | M/% | |
|---|---|---|
| 理论值一 | 理论值二 | |
| 水平500 N | 8.39 | 4.84 |
| 竖直500 N | 7.59 | 2.79 |
| 水平0~500 N | 111.12 | 5.73 |
| 竖直0~500 N | 52.49 | 4.81 |
| 1 | WANG X, HUANG J, SONG H. Simultaneous robot-world and hand-eye calibration based on a pair of dual equations [J].Measurement,2021,181:109623-1-13. |
| 2 | 段书用,李昌洛,韩旭,等 .机械臂动力学分析及关节非线性摩擦模型建立[J].机械工程学报,2020,56(9):18-28. |
| DUAN Shuyong, LI Changluo, HAN Xu,et al .Forward-inverse dynamics analysis of robot arm trajectories and development of a nonlinear friction model for robot joints [J].Journal of Mechanical Engineering,2020,56(9):18-28. | |
| 3 | ROVEDA L, PIGA D .Sensorless environment stiffness and interaction force estimation for impedance control tuning in robotized interaction tasks [J].Autonomous Robots,2021,45(3):371-388. |
| 4 | ZHANG T, SUN H, ZOU Y,et al .An estimation model of human dynamic arm strength with joint rotation compensation [J].Measurement,2021,179:109486-1-10. |
| 5 | TRAN C, TRIVEDI M M .3-D posture and gesture re-cognition for interactivity in smart spaces [J].IEEE Transactions on Industrial Informatics,2011,8(1):178-187. |
| 6 | 陶东,张强,赵良玉 .模型不确定的空间机器人无力传感器阻抗控制方法 [J].宇航学报,2021,42(6):766-774. |
| TAO Dong, ZHANG Qiang, ZHAO Liangyu .Force sensorless impedance control for a space robot with dynamic uncertainty [J].Journal of Astronautics,2021,42(6):766-774. | |
| 7 | SEBASTIAN G, LI Z, CROCHER V,et al .Interaction force estimation using extended state observers:An application to impedance-based assistive and rehabilitation robotics [J].IEEE Robotics and Automation Letters,2019,4(2):1156-1161. |
| 8 | PHAM T H, CARON S, KHEDDAR A .Multicontact interaction force sensing from whole-body motion capture [J].IEEE Transactions on Industrial Informatics,2017,14(6):2343-2352. |
| 9 | MAO Z, IIZUKA T, MAEDA S .Bidirectional electrohydrodynamic pump with high symmetrical performance and its application to a tube actuator [J].Sensors and Actuators A:Physical,2021,332:113168-1-7. |
| 10 | 孙博林,程敏,丁孺琦 .带流量前馈与工作腔压力反馈的电液负载敏感系统节能方法 [J].液压与气动,2022,45(10):1-7. |
| SUN Bolin, CHENG Min, DING Ruqi .Energy sa-ving method for electro-hydraulic load-sensing systems with [J].Chinese Hydraulics & Pneumatics,2022,45(10):1-7. | |
| 11 | KOIVUMÄKI J, MATTILA J .Stability-guaranteed force-sensorless contact force/motion control of heavy-duty hydraulic manipulators [J].IEEE Transactions on Robotics,2015,31(4):918-935. |
| 12 | KAMEZAKI M, IWATA H, SUGANO S .Condition-based less-error data selection for robust and accurate mass measurement in large-scale hydraulic manipulators [J].IEEE Transactions on Instrumentation and Measurement,2017,66(7):1820-1830. |
| 13 | RENNER A, WIND H, SAWODNY O .Online payload estimation for hydraulically actuated manipulators [J].Mechatronics,2020,66:102322-1-15. |
| 14 | 丁亚东,陈柏,吴洪涛,等 .一种工业机器人动力学参数的辨识方法 [J].华南理工大学学报:(自然科学版),2015,43(3):49-56. |
| DING Ya-dong, CHEN Bai, WU Hong-tao,et al .An identification method of industrial robot's dynamic parameters[J].Journal of South China University of Technology(Natural Science Edition),2015,43(3):49-56. | |
| 15 | VUONG N, MARCELO JR A H, LI Y,et al .Improved dynamic identification of robotic manipulators in the linear region of dynamic friction [J].IFAC Proceedings Volumes,2009,42(16):167-172. |
| 16 | 郭菲,李永泉,李玉昆,等 .电液驱动 3-UPS/S 并联稳定平台的动力学参数辨识 [J].中国机械工程,2016,27(21):2862-2868,2876. |
| GUO Fei, LI Yongquan, LI Yukun,et al .Indentification of dynamics parameters for an electro-hydraulic 3-UPS/S paralled stabilized paltform [J].Journal of Mechanical Engineering,2016,27(21):2862-2868,2876. | |
| 17 | 张铁,胡亮亮,邹焱飚 .基于混合遗传算法的机器人改进摩擦模型辨识 [J].浙江大学学报 (工学版),2021,55(5):801-809. |
| ZHANG Tie, HU Liang-liang, ZOU Yan-biao .Identification of improved friction model for robot based on hybrid genetic algorithm [J].Journal of Zhejiang University (Engineering Science),2021,55(5):801-809. | |
| 18 | 李琳,林燕龙,邹焱飚 .Scara 机器人关节摩擦建模与补偿的实验与仿真 [J].系统仿真学报,2019,31(8):1572-1581. |
| LI Lin, LIN Yanlong, ZOU Yanbiao .Simulation and experiment of friction modeling and compensation of scara [J].Journal of System Simulation,2019,31(8):1572-1581. | |
| 19 | 吴文祥,朱世强,靳兴来 .基于改进傅里叶级数的机器人动力学参数辨识 [J].浙江大学学报(工学版),2013,47(2):231-237. |
| WU Wen-xiang, ZHU Shi-qiang, JIN Xing-lai .Dynamic identification for robot manipulators based on modifiedFourierseries [J].Journal of Zhejiang University (Engineering Science),2013,47(2):231-237. | |
| 20 | 席万强,陈柏,丁力,等 .考虑非线性摩擦模型的机器人动力学参数辨识 [J].农业机械学报,2017,48(2):393-399. |
| XI Wanqiang, CHEN Bai, DING Li,et al .Dynamic parameter identification for robot manipulators with nonlinear friction model [J].Transactions of the Chinese Society for Agricultural Machinery,2017,48(2):393-399. | |
| 21 | 贺苗,吴晓敏,邵桂芳,等 .基于RBFNN的机器人关节摩擦建模与补偿研究 [J].仪器仪表学报,2020,41(11):278-284. |
| HE Miao, WU Xiaomin, SHAO Guifang,et al .Research on friction modeling and compensation of robot joint based on RBFNN [J].Chinese Journal of Scientific Instrument,2020,41(11):278-284. | |
| 22 | 张铁,洪景东,李秋奋,等 .基于 BP 神经网络的机器人波动摩擦力矩修正方法 [J].工程科学学报,2019,41(8):1085-1091. |
| ZHANG Tie, HONG Jingdong, LI Qiufen,et al .Wave friction correction method for a robot based on BP neural network [J].Chinese Journal of Engineering,2019,41(8):1085-1091. | |
| 23 | YANG H, FANG H, FANG Y,et al .Dimensional synthesis of a novel 5-DOF reconfigurable hybrid perfusion manipulator for large-scale spherical honeycomb perfusion [J].Frontiers of Mechanical Engineering,2021,16(1):46-60. |
| 24 | AI BITAR N, GAVRILOV A .A new method for compensating the errors of integrated navigation systems using artificial neural networks [J].Measurement,2021,168:108391-1-12. |
| 25 | WANG S, SHAO X, YANG L,et al .Deep learning aided dynamic parameter identification of 6-DOF robot manipulators [J].IEEE Access,2020,8:138102-138116. |
| 26 | XIAO J, ZENG F, ZHANG Q,et al .Research on the forcefree control of cooperative robots based on dynamic parameters identification [J].Industrial Robot:the International Journal of Robotics Research and Application,2019,46(4):499-509. |
| 27 | 程文明,张道裕,谌庆荣,等 .欠驱动起重机的神经网络直接鲁棒自适应控制 [J].华南理工大学学报(自然科学版),2021,49(5):120-127,144. |
| CHENG Wenming, ZHANG Daoyu, CHEN Qingrong,et al .A directly robust adaptive neural network controller for an underacuated crane[J].Journal of South China University of Technology (Natural Science Edition),2021,49(5):120-127,144. | |
| 28 | LIU S, WANG L, WANG X V .Sensorless force estimation for industrial robots using disturbance observer and neural learning of friction approximation [J].Robotics and Computer-Integrated Manufacturing,2021,71:102168-1-11. |
| [1] | DU Heng, LÜ Yanting, HUANG Hui, MA Baizhou. High-Precision Improved Hyperbolic Tangent Model for Multi-Stage Flow Channel Magnetorheological Damper [J]. Journal of South China University of Technology(Natural Science Edition), 2025, 53(7): 39-49. |
| [2] | GUO Xinping, HE Xin, WANG Hengsheng, et al. Model Feedforward Compensation Active Disturbance Rejection Control for a Heavy-Duty Hydraulic Manipulator Arm [J]. Journal of South China University of Technology(Natural Science Edition), 2024, 52(4): 59-67. |
| [3] | YE Bosheng, LI Siao, TAN Shuai, et al. Trajectory Friction Compensation Algorithm for Robots Based on Velocity Control [J]. Journal of South China University of Technology(Natural Science Edition), 2024, 52(4): 51-58. |
| [4] | WU Chunling, FU Juncheng, XU Xianfeng, et al. Lithium Battery SOC Estimation Based on Multi Innovation Least Square and Multi Innovation Extended Kalman Filter Algorithm [J]. Journal of South China University of Technology(Natural Science Edition), 2024, 52(2): 74-83. |
| [5] | YAO Bin, ZHANG Zihao, DAI Yu, et al. Research on Dynamic Characteristics of Force Sensor Based on VFF-RLS [J]. Journal of South China University of Technology(Natural Science Edition), 2023, 51(5): 86-94. |
| [6] | YANG Jipeng XIA Ye SUN Limin. Structural Parameter Identification and Seismic Input Inversion Based on Transform Space Method [J]. Journal of South China University of Technology(Natural Science Edition), 2021, 49(8): 85-94. |
| [7] | LIU Guang LIU Jike Lü Zhongrong. Parameter Identification of Fractional-Order System via Enhanced Response Sensitivity Approach [J]. Journal of South China University of Technology (Natural Science Edition), 2020, 48(4): 65-72,94. |
| [8] | LIU Pei ZHU Haixin LIAN Pengyu YANG Weiguo. Automatic Updating Method of Finite Element Model and Its Application Based on Ambient Vibration and Bayesian Theorem [J]. Journal of South China University of Technology(Natural Science Edition), 2019, 47(7): 49-57. |
| [9] | CAO Xiaohua WEI Heng WANG Xin . Parameter Identification Method of PMSM Considering Temperature Influence [J]. Journal of South China University of Technology (Natural Science Edition), 2018, 46(8): 64-71. |
| [10] | REN Ya-feng CHANG Shan LIU Geng WU Li-yan ZHAO Chen-qing CHANG Le-hao. Vibration Analysis of Gear-Housing-Foundation Coupled System [J]. Journal of South China University of Technology (Natural Science Edition), 2017, 45(5): 38-44. |
| [11] | ZHANG Tie LIANG Xiao-hong QIN Bin-bin LIU Xiao-gang. Dynamic Parameter Identification of SCARA Robots Based on Newton-Euler Method [J]. Journal of South China University of Technology (Natural Science Edition), 2017, 45(10): 129-136,143. |
| [12] | DING Li WU Hong-tao YAO Yu LI Yao XIE Ben-hua CHEN Bai. Parameters Identification of Industrial Robots Based on WLS-ABC Algorithm [J]. Journal of South China University of Technology (Natural Science Edition), 2016, 44(5): 90-95. |
| [13] | Zheng Wei-jia Wang Xiao-hong Pi You-guo. Fractional-Order Modeling of Permanent Magnet Synchronous Motor Based on Output-Error Algorithm [J]. Journal of South China University of Technology (Natural Science Edition), 2015, 43(9): 8-13. |
| [14] | Zhang Bao- zhen Zhang Yao Lin Ling- xue. Estimation Equivalence Method Based on Modified Differential Evolution Algorithm [J]. Journal of South China University of Technology (Natural Science Edition), 2014, 42(4): 7-12,18. |
| [15] | Li Yi- bo Zhang Meng Huang Ming- hui Lu Xin- jiang. Parameter Identification and Compensation Control of Friction for Die- Forging Press Running at Low Speed [J]. Journal of South China University of Technology (Natural Science Edition), 2013, 41(7): 38-44. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||