Journal of South China University of Technology(Natural Science Edition) ›› 2022, Vol. 50 ›› Issue (10): 124-131.doi: 10.12141/j.issn.1000-565X.220120
Special Issue: 2022年流体动力与机电控制工程
• Fluid Power & Electromechanical Control Engineering • Previous Articles Next Articles
Kinematic Characteristics and Dynamic Analysis of Recirculating Planetary Roller Screw Mechanism
QIAO Guan1 LIAO Rong1 JIANG Guangjun1 MA Shangjun2 YANG Guangmei3
- 1.Inner Mongolia Key Laboratory of Advanced Manufacturing Technology,Inner Mongolia University of Technology,Hohhot 010051,Inner Mongolia,China
2.Shaanxi Engineering Laboratory for Transmissions and Controls,Northwestern Polytechnical University,Xi’an 710072,Shaanxi,China
3.Inner Mongolia Power Machinery Research Institute,Hohhot 010010,Inner Mongolia,China
-
Received:2022-03-14Online:2022-10-25Published:2022-10-09 -
Contact:乔冠(1990-),男,博士,副教授,主要从事行星滚柱丝杠传动设计与研制研究。 E-mail:qiaoguan@imut.edu.cn -
About author:乔冠(1990-),男,博士,副教授,主要从事行星滚柱丝杠传动设计与研制研究。 -
Supported by:the National Natural Science Foundation of China(52265009);the Natural Science Foundation of Inner Mongolia(2020BS05003);Inner Mongolia Science and Technology Project(2020GG0288)
CLC Number:
Cite this article
QIAO Guan, LIAO Rong, JIANG Guangjun, et al. Kinematic Characteristics and Dynamic Analysis of Recirculating Planetary Roller Screw Mechanism[J]. Journal of South China University of Technology(Natural Science Edition), 2022, 50(10): 124-131.
share this article
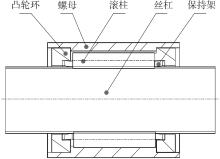
Fig.1
Schematic diagram of RPRSM structure"
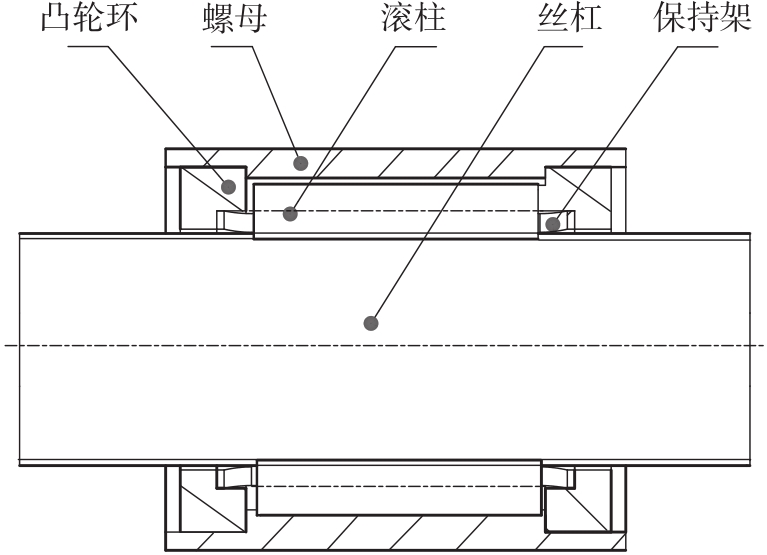
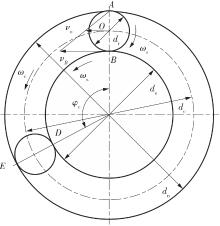
Fig.2
RPRSM motion diagram"
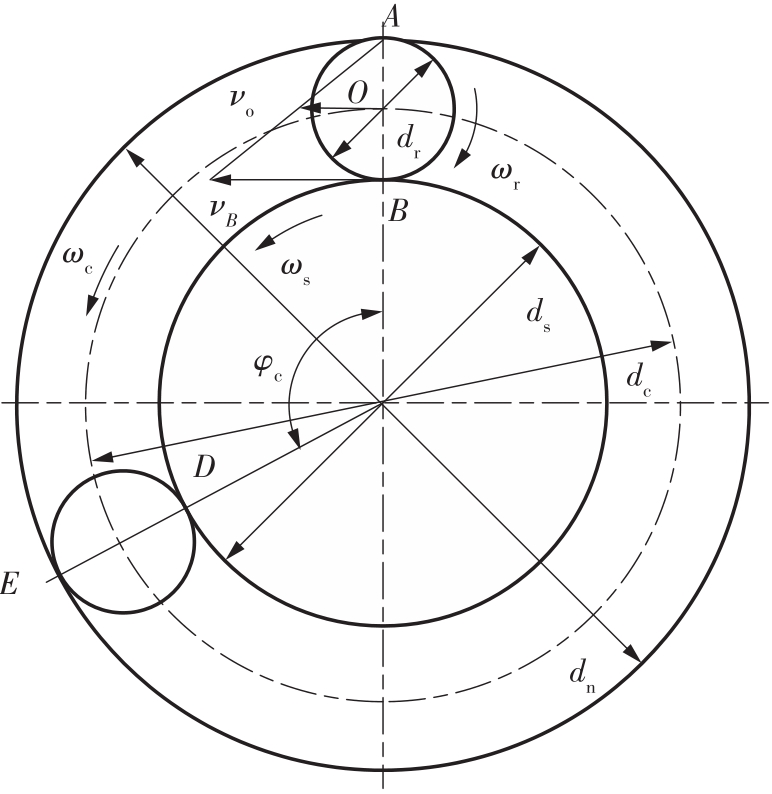
Table 1
Basic parameters of main parts"
| 零件 | 个数 | 螺距/mm | 头数 | 旋向 | 节圆直径/mm |
|---|---|---|---|---|---|
| 滚柱 | 12 | — | — | — | 6.63 |
| 丝杠 | 1 | 1 | 1 | 右旋 | 31.13 |
| 螺母 | 1 | 1 | 1 | 右旋 | 44.14 |
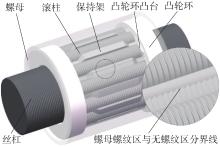
Fig.3
RPRSM 3D model"
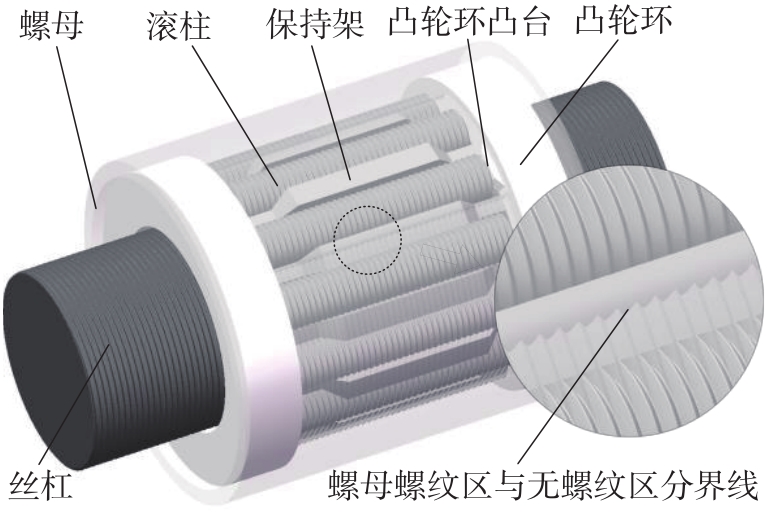
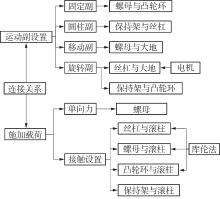
Fig.4
Basic connection relation of virtual prototype"
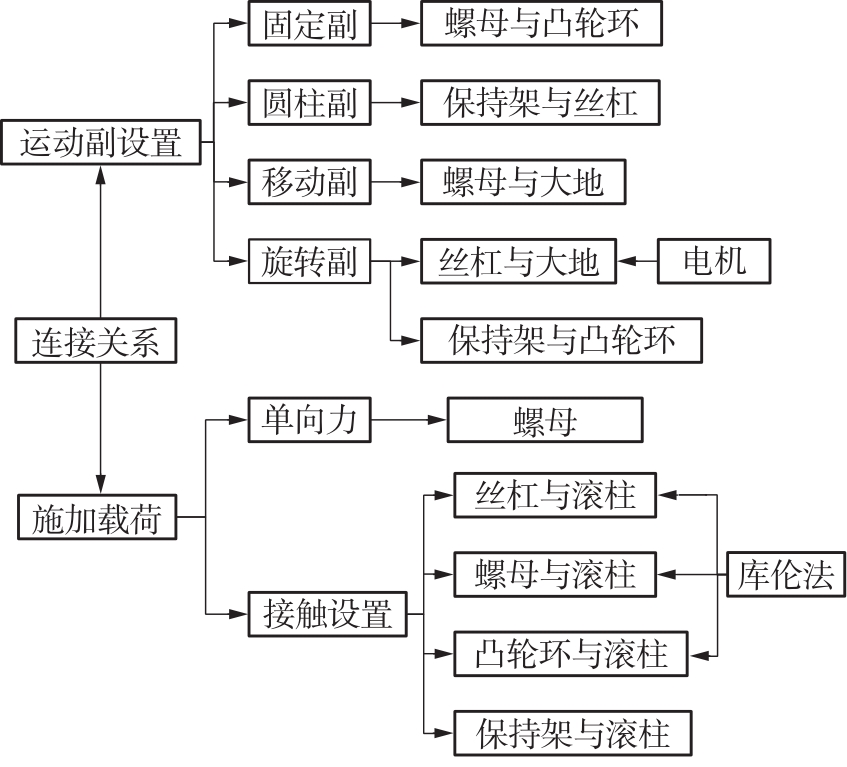
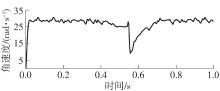
Fig.5
Angular speed of roller"
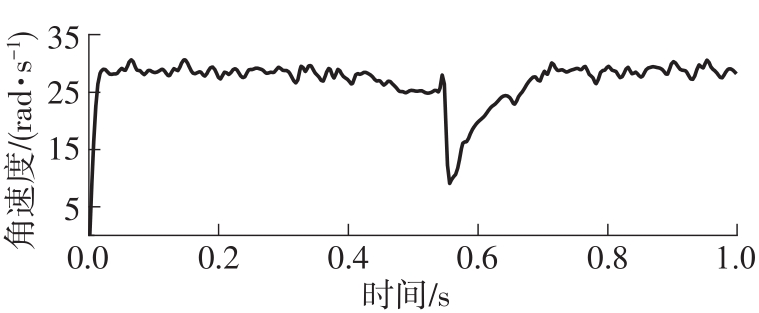
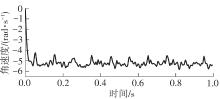
Fig.6
Angular speed of carrier"
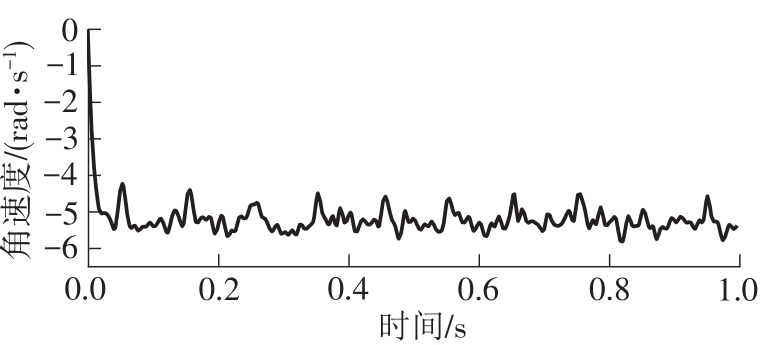
Fig.7
Axial displacement of nut"
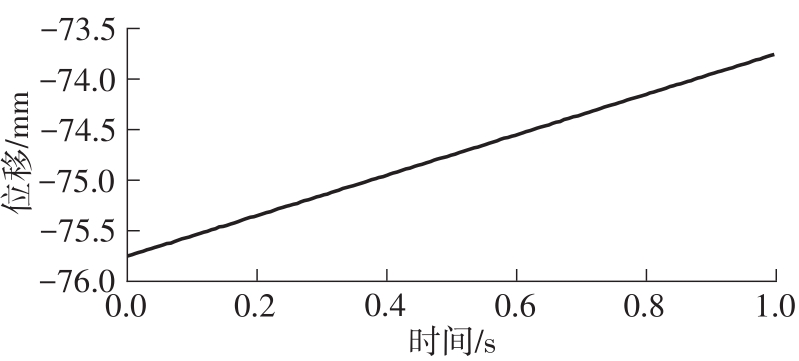
Fig.8
Moving velocity of nut"
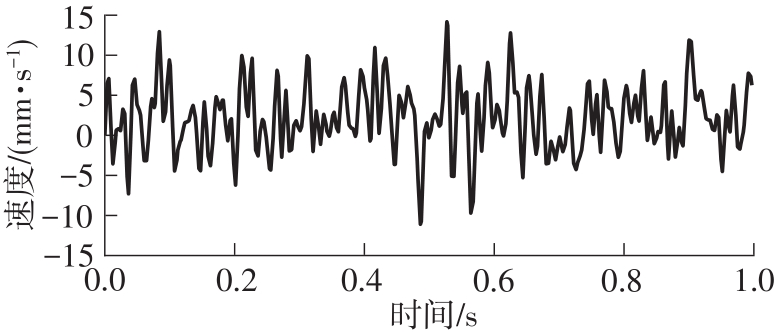
Fig.9
Angular speed of screw"
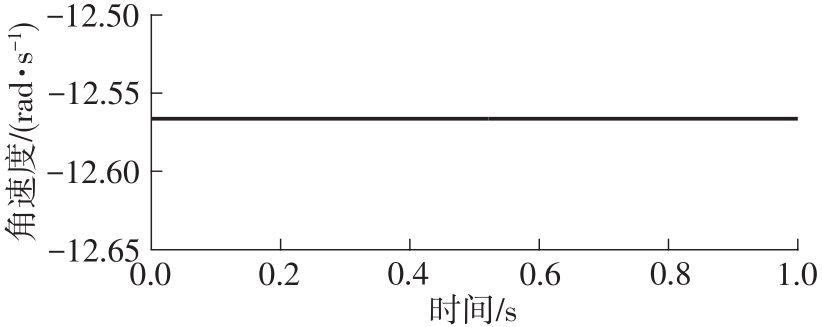
Table 2
Comparison between simulation value and theoretical value"
| 项目 | ||||
|---|---|---|---|---|
| 相对误差/% | 3.91 | 0.19 | 1.00 | 0 |
| 理论值 | 29.43 | -5.19 | 2.00 | 2 |
| 仿真值 | 28.28 | -5.20 | 1.98 | 2 |
Fig.10
Contact force curves between screw and roller"
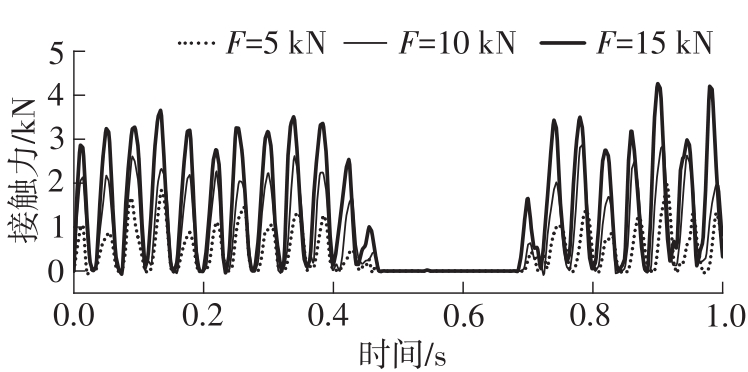
Fig.11
Contact force curves between roller and nut"
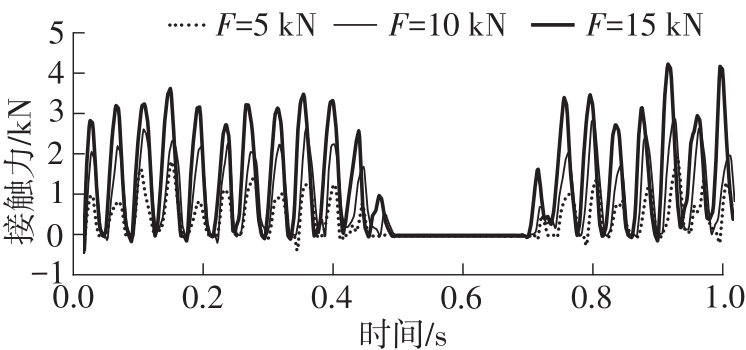
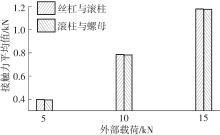
Fig.12
Average contact force between screw/nut and roller"
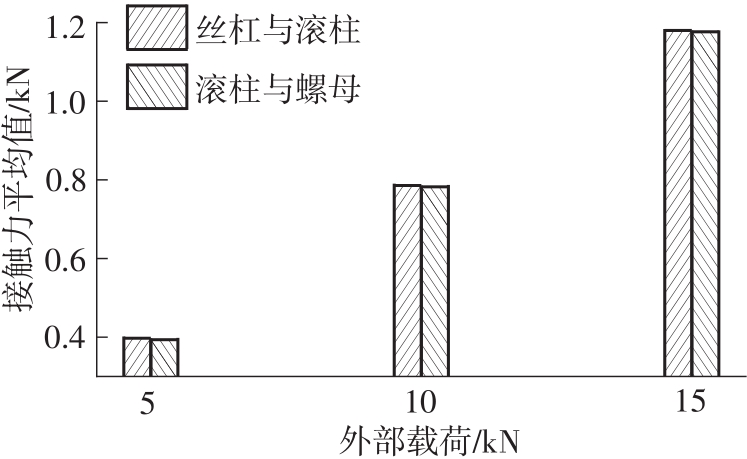

Fig.13
Collision force between roller and convex platform of cam ring under three loads"
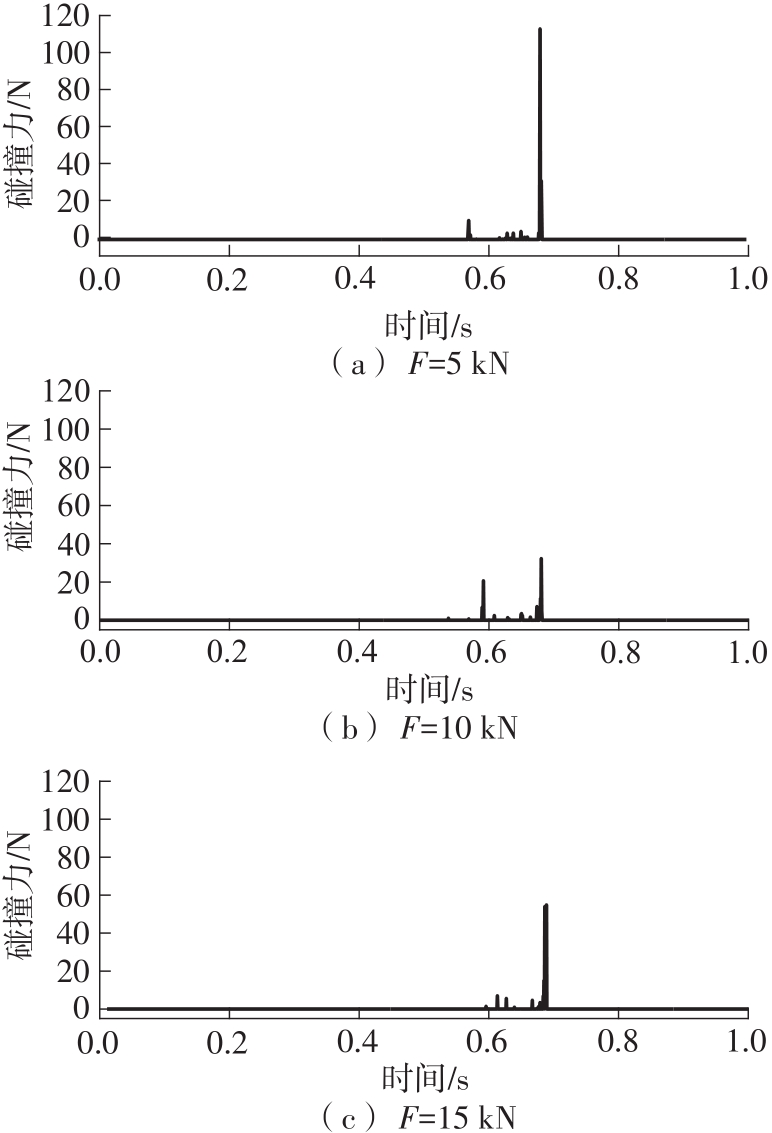
Fig.14
Collision force between roller and convex platform of cam ring at 10 kN"
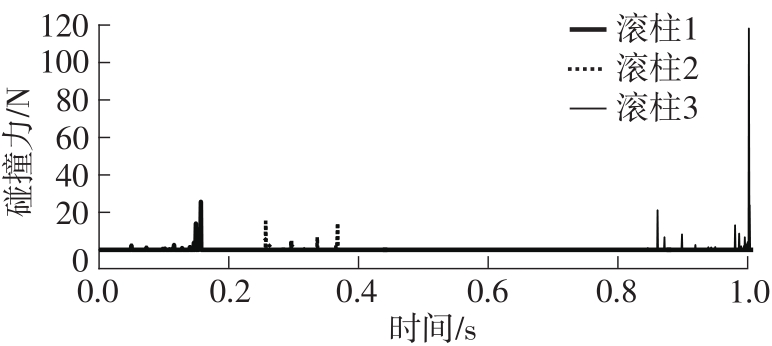

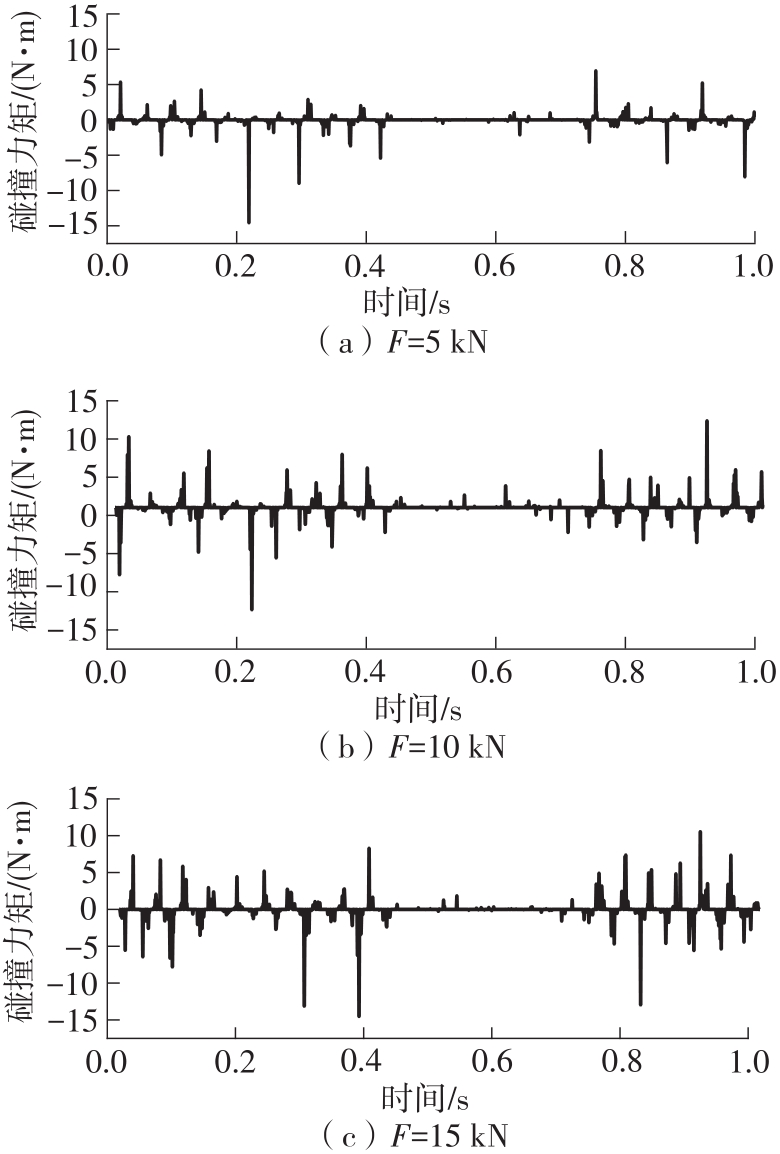
Fig.15
Collision torque between roller and carrier under three loads"
| 1 | 姚琴,刘永寿,马尚君,等. 基于运动学分析的行星滚柱丝杠副应力循环规律 [J].华南理工大学学报(自然科学版),2021,49(9):135-144. |
| YAO Qin, LIU Yongshou, MA Shangjun,et al .Stress cycle behaviors of planetary roller screw mechanism based on kinematic analysis [J].Journal of South China University of Technology(Natural Science Edition),2021,49(9):135-144. | |
| 2 | LIU Y, SHANG Y, WANG J .Mathematical analysis of the meshing performance of planetary roller screws applying different roller thread shapes [J].Advances in Mechanical Engineering,2017,9(5):1-11. |
| 3 | 靳谦忠,杨家军,孙健利 .滚珠丝杠副和行星式滚柱丝杠副静刚度的比较研究 [J].机械科学与技术,1999(2):62-64. |
| JIN Qianzhong, YANG Jiajun, SUN Jianli .Comparative study on static stiffness of ball screw and planetary ball screw [J].Mechanical Science and Technology for Aerospace Engineering,1999(2):62-64. | |
| 4 | MA S, ZHANG T, LIU G,et al .Kinematics of plane-tary roller screw mechanism considering helical directions of screw and roller threads [J].Mathematical Problems in Engineering,2015,2015:1-11. |
| 5 | VELINSKY S A, CHU B, LASKY T A .Kinematics and efficiency analysis of the planetary roller screw mechanism [J].Journal of Mechanical Design,2009,131(1):1-8. |
| 6 | QIAO G, LIU G, SHI Z .A review of electromechanical actuators for more/all electric aircraft systems [J].Proceedings of the Institution of Mechanical Engineers,Part C:Journal of Mechanical Engineering Science,2018,232(22):4128-4151. |
| 7 | FU X, LIU G, LI X,et al .Dynamic modeling of the double-nut planetary roller screw mechanism considering elastic deformations [J].Journal of Computational and Nonlinear Dynamics,2021,16(5):1-13. |
| 8 | FU X, LIU G, MA S,et al .Kinematic model of pla-netary roller screw mechanism with run-out and position errors [J].Journal of Mechanical Design,2018,140(3):1-10. |
| 9 | 马尚君,刘更,周建星.行星滚柱丝杠副运转过程动态特性分析 [J].振动与冲击,2013,32(3):167-171. |
| MA Shangjun, LIU Geng, ZHOU Jianxing .Dynamic characteristics analysis of planetary roller screw during operation [J].Journal of Vibration and Shock,2013,32(3):167-171. | |
| 10 | 吴林萍,马尚君,张建新,等 .基于参数匹配的二级行星滚柱丝杠动力学分析 [J].华南理工大学学报(自然科学版),2021,49(9):126-134. |
| WU Linping, MA Shangjun, ZHANG Jianxin,et al .Dynamic analysis of two-stage planetary roller screw mechanism based on parameter matching [J].Journal of South China University of Technology(Natural Science Edition),2021,49(9):126-134. | |
| 11 | 党金良,刘更,马尚君 .反向式行星滚柱丝杠机构运动原理及仿真分析 [J].系统仿真学报,2013,25(7):1646-1651. |
| DANG Jinliang, LIU Geng, MA Shangjun .The motion principle and simulation analysis of the reverse pla-netary roller screw mechanism [J].Journal of System Simulation,2013,25(7):1646-1651. | |
| 12 | 王乐,李海泓,张玲 .行星滚柱丝杠小转角运动的动力学分析 [J].航空兵器,2015(2):58-64. |
| WANG Le, LI Haihong, ZHANG Ling .The dynamics analysis of small angle motion of planetary roller screw [J] Aero Weaponry,2015(2):58-64. | |
| 13 | 乔冠,刘更,马尚君,等 .基于行星滚柱丝杠副的机电作动器动态特性分析 [J].振动与冲击,2016,35(7):82-88. |
| QIAO Guan, LIU Geng, MA Shangjun,et al .Dynamic characteristics analysis of electromechanical actuators based on planetary roller screw[J].Journal of Vibration and Shock,2016,35(7):82-88. | |
| 14 | 贺继鹏,刘更,马尚君,等 .基于键合图的行星滚柱丝杠副动态特性建模与仿真 [J].振动与冲击,2015,34(20):66-73. |
| HE Jipeng, LIU Geng, MA Shangjun,et al .Mode-ling and simulation of dynamic characteristics of pla-netary roller screw based on bond graph [J].Journal of Vibration and Shock,2015,34(20):66-73. | |
| 15 | 李欣,刘更,宋春雨,等 .多级行星滚柱丝杠刚体动力学建模与分析 [J].西北工业大学学报,2020,38(5):1001-1009. |
| LI Xin, LIU Geng, SONG Chunyu,et al .Rigid body dynamics modeling and analysis of multi-stage planetary roller screw [J].Journal of Northwestern Polytechnical University,2020,38(5):1001-1009. | |
| 16 | 邢思 .循环式行星滚柱丝杠副的设计与工作特性研究[D].汉中:陕西理工大学,2018. |
| 17 | 程春林 .一种直槽保持架循环式行星滚柱丝杠:CN108266510A [P].2018-07-10. |
| 18 | 刘更,马尚君,佟瑞庭,等 .行星滚柱丝杠副的新发展及关键技术 [J].机械传动,2012,36(5):103-108. |
| LIU Geng, MA Shangjun, TONG Ruiting,et al .New developments and key technologies of planetary roller screw [J].Journal of Mechanical Transmission,2012,36(5):103-108. | |
| 19 | 李巧 .循环式行星滚柱丝杠副的设计及运动连续性研究[D].汉中:陕西理工大学,2021. |
| 20 | 李增刚 .ADAMS入门详解与实例 [M].2版.北京:国防工业出版社,2014:126-127. |
| [1] | WU Wenliang, ZENG Weikai, LI Zhi, et al. Analysis of Water Accumulation Characteristics on S-Curve of Highway Based on Numerical Simulation [J]. Journal of South China University of Technology(Natural Science Edition), 2024, 52(8): 56-64. |
| [2] | LI Xiao, LI Yapeng. Artificial Bladder Detrusor System Driven by Shape Memory Alloy [J]. Journal of South China University of Technology(Natural Science Edition), 2024, 52(6): 73-80. |
| [3] | HAO Xiuhong, TIAN Runwei, JIAO Wei, et al. Effects of the Wear of Fabric Liner on Self-Lubricating Joint Bearings Dynamics [J]. Journal of South China University of Technology(Natural Science Edition), 2024, 52(4): 88-94. |
| [4] | ZHENG Zhi, GUO Naisheng, YOU Zhanping. Molecular Simulation of Interaction Behavior Between Asphalt Components and Waste Wood Oil [J]. Journal of South China University of Technology(Natural Science Edition), 2024, 52(12): 79-86. |
| [5] | XIA Yimin, LI Zhenghui, TAN Shunhui, et al.. Influence of Oil Characteristics on Flow Pulsation of Axial Piston Pump of Large Displacement Under Solid-Liquid-Temperature Coupling [J]. Journal of South China University of Technology(Natural Science Edition), 2023, 51(9): 44-55. |
| [6] | HU Xingjun, LUO Yufei, ZHANG Jinglong, et al.. Influence of Inflow Direction on Thermal-Hydraulic Performance of Louvered Fin-Common Flow Down Vortex Generator [J]. Journal of South China University of Technology(Natural Science Edition), 2023, 51(7): 12-20. |
| [7] | LI Wenbo, DU Xiaoxiao. Dissociation Behavior of Polyacrylic Acid in Aqueous Solution [J]. Journal of South China University of Technology(Natural Science Edition), 2023, 51(3): 83-90. |
| [8] | LOU Bo, LI Senhao, LU Song, et al. Kinetic Mechanism of Pyrolysis of Lilac Lignin Dimer Memes [J]. Journal of South China University of Technology(Natural Science Edition), 2023, 51(12): 107-117. |
| [9] | QIAO Guan, LIAO Rong, ZHANG Xiaomin, et al.. Fatigue Analysis and Life Prediction of Recirculating Planetary Roller Screw Mechanism [J]. Journal of South China University of Technology(Natural Science Edition), 2023, 51(11): 131-139. |
| [10] | HE Zhaoxia, WANG Xingzhe, XING Zengfei, et al. Dynamic Characteristics Analysis of Vibrating Screen Based on System and Particle Coupling Dynamics [J]. Journal of South China University of Technology(Natural Science Edition), 2023, 51(1): 41-50. |
| [11] | HOU Liwei, WANG Hengsheng, ZOU Haoran. Deep Learning-Based Prediction of Contact Force in the Process of Shoveling Up Glass Subtrate [J]. Journal of South China University of Technology(Natural Science Edition), 2022, 50(8): 71-81. |
| [12] | XU Ning, WANG Hainian, CHEN Yu, et al. Research on the Compatibility of Bio-Asphalt Based on Molecular Dynamics [J]. Journal of South China University of Technology(Natural Science Edition), 2022, 50(5): 65-72. |
| [13] | HAN Guangze, XING Yukun, HU Qiuxia, et al. Thermodynamic Characteristics of a Single-Phase Dielectric System with the Action of Electrostatic Filed [J]. Journal of South China University of Technology(Natural Science Edition), 2022, 50(3): 127-132,139. |
| [14] | ZHAO Jin, QIN Yangjun, LIU Chang, et al. Research on Graphene-based Heat Transfer in Nanochannel by Using Non-equilibrium Molecular Dynamics [J]. Journal of South China University of Technology(Natural Science Edition), 2022, 50(3): 140-146. |
| [15] | XIA Shaojun JIN Qinglong WU Zhixiang. Exergy efficiency analyses and optimization of regenerative S-CO2 Brayton cycle [J]. Journal of South China University of Technology(Natural Science Edition), 2022, 50(2): 111-120. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||