Journal of South China University of Technology(Natural Science Edition) ›› 2024, Vol. 52 ›› Issue (8): 65-75.doi: 10.12141/j.issn.1000-565X.230388
Previous Articles Next Articles
Operational Characteristics and Eco-Safe Influence of Connected Mixed Platoon in Car-Following Event
FU Qiang( ), ZHAO Xiaohua, LI Haijian(), REN Wenhao, DAI Yibo
), ZHAO Xiaohua, LI Haijian(), REN Wenhao, DAI Yibo
- Faculty of Architecture,Civil and Transportation Engineering,Beijing University of Technology,Beijing 100124,China
-
Received:2023-06-07Online:2024-08-25Published:2023-12-27 -
Contact:李海舰(1986—),男,博士,副教授,主要从事智能交通系统研究。 E-mail:lihaijian@bjut.edu.cn -
About author:付强(1995—),男,博士生,主要从事智能网联、驾驶行为研究。E-mail: fuqiang@emails.bjut.edu.cn -
Supported by:the National Natural Science Foundation of China(52072012)
CLC Number:
Cite this article
FU Qiang, ZHAO Xiaohua, LI Haijian, REN Wenhao, DAI Yibo. Operational Characteristics and Eco-Safe Influence of Connected Mixed Platoon in Car-Following Event[J]. Journal of South China University of Technology(Natural Science Edition), 2024, 52(8): 65-75.
share this article

Fig.1
Framework of connected mixed platoon test platform"


Fig.2
Eco-lane design layout"


Fig.3
Schematic diagram of connected mixed platoon mode"


Fig.4
Connected mixed platoon effect"

Fig.5
Connected HMI interface design diagram"
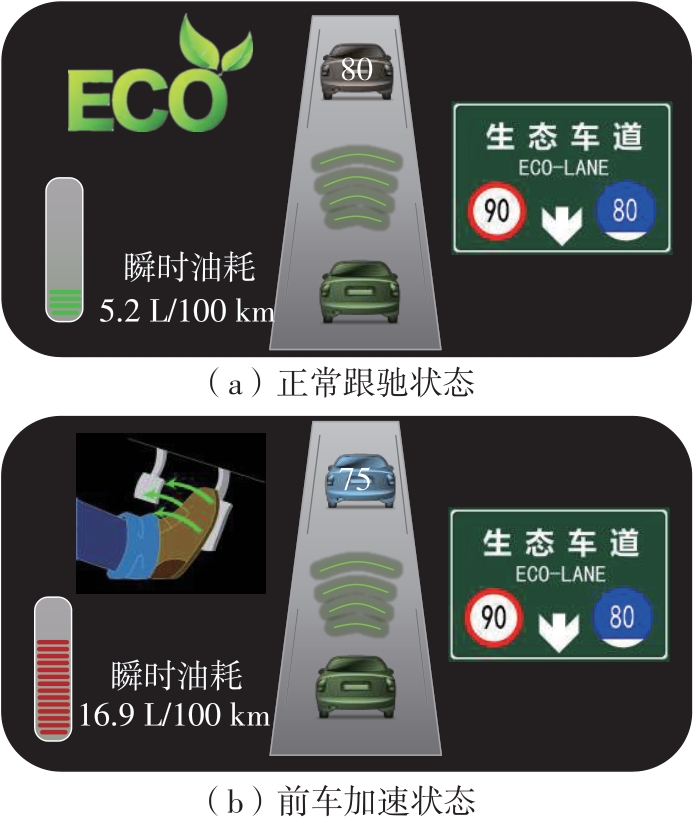
Table 1
Connected HMI voice information content"
| 预警点 | 预警信息 |
|---|---|
| ① | 前方1 000 m最外侧为生态车道,建议速度80~90 km/h |
| ② | 前方500 m最外侧为生态车道,建议速度80~90 km/h |
| ③ | 您已进入生态车道,建议速度80~90 km/h |
| ④ | 前方有慢速车辆 |
| ⑤ | 请保持安全车距 |
| ⑥ | 前方500 m生态车道结束 |
| ⑦ | 您已驶离生态车道 |
| 建议速度80~90 km/h | |
| “哔哔哔”蜂鸣声 | |
| 请避免急加速 | |
| 请避免急减速 |

Fig.6
Connected HMI application effect"

Table 2
Basic information of participants"
| 性别 | 数量 | 年龄/岁 | 驾龄/a | 不同驾驶里程 下的人数 | |||
|---|---|---|---|---|---|---|---|
| 均值 | 标准差 | 均值 | 标准差 | <3万km | ≥3万km | ||
| 合计 | 36 | 36.67 | 14.18 | 9.61 | 10.01 | 24 | 12 |
| 男性 | 24 | 38.59 | 13.98 | 11.67 | 10.51 | 14 | 10 |
| 女性 | 12 | 32.83 | 13.80 | 5.51 | 7.38 | 10 | 2 |

Fig.7
Experimental flowchart"

Table 3
Statistical test results for driving behavior indicator"
| 指标 | 均值 | 显著性 | |||||
|---|---|---|---|---|---|---|---|
| 单车-无网联 | 单车-网联 | 编队-无网联 | 编队-网联 | 车队形式 | 网联 条件 | 交互作用 | |
| 速度/(km·h-1) | 77.03 | 77.76 | 80.10 | 76.93 | 0.231 | 0.022* | 0.035* |
| 加速度/(m·s-2) | -0.025 | -0.029 | -0.019 | -0.011 | 0.354 | 0.489 | 0.152 |
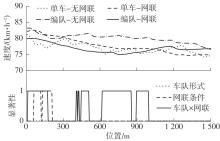
Fig.8
Changing process of speed for platoon"

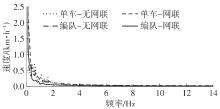
Fig.9
Spectrum of speed for platoon"


Fig.10
Histogram of high frequency component of speed for platoon"


Fig.11
Changing process of acceleration for platoon"


Fig.12
Spectra of acceleration for platoon"


Fig.13
Histogram of high frequency component of acceleration for platoon"

Table 4
Statistical test results for eco-safe data indicator"
| 指标 | 均值 | 显著性 | |||||
|---|---|---|---|---|---|---|---|
| 单车-无网联 | 单车-网联 | 编队-无网联 | 编队-网联 | 车队形式 | 网联条件 | 交互作用 | |
| 油耗/(L·(100 km)-1) | 7.50 | 6.82 | 6.46 | 6.70 | 0.000** | 0.971 | 0.008** |
| 速度安全熵 | 0.038 5 | 0.013 0 | 0.021 5 | 0.010 3 | 0.036* | 0.000** | 0.253 |
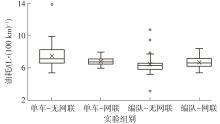
Fig.14
Fuel consumption distribution characteristics of platoon"
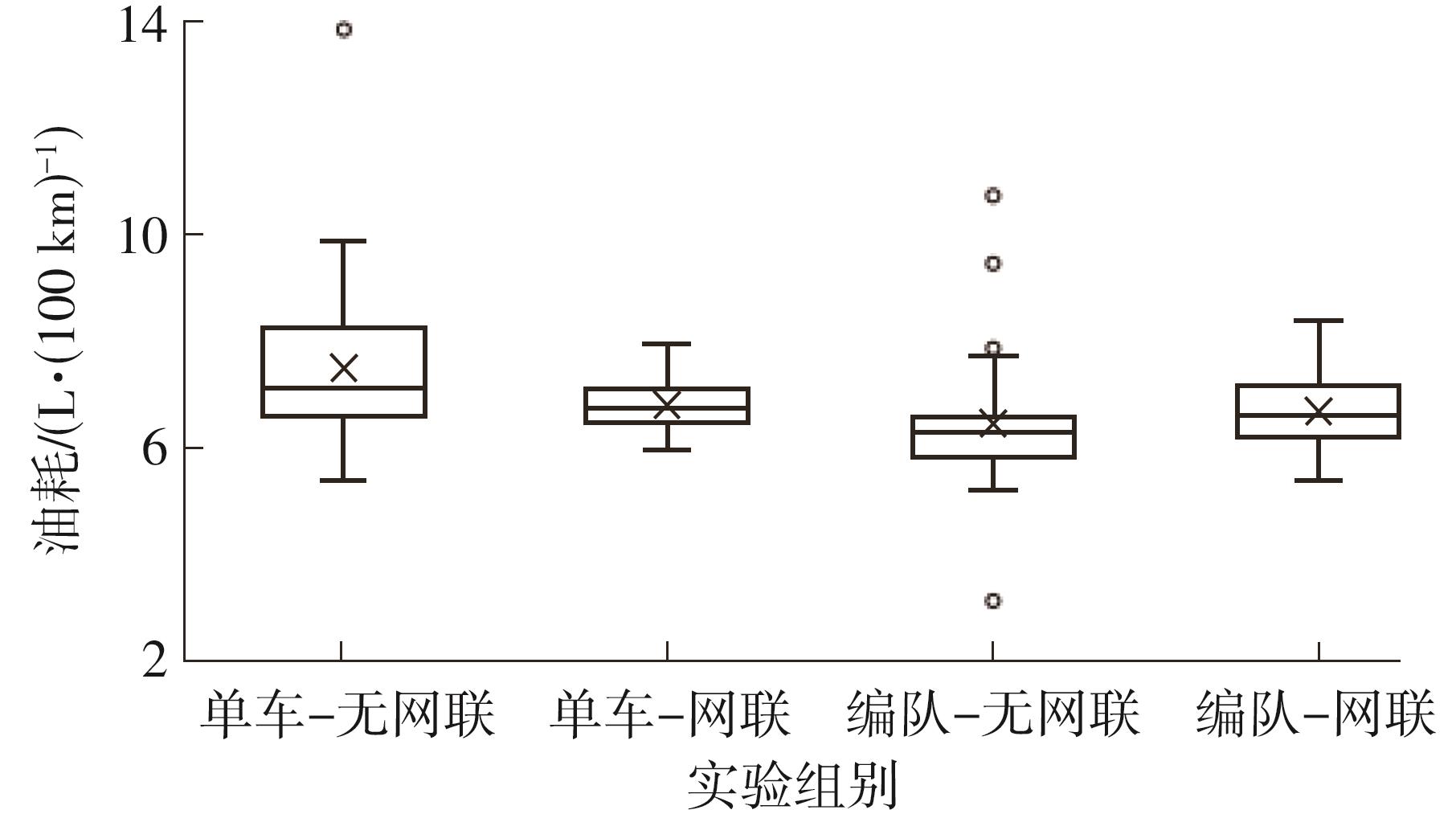
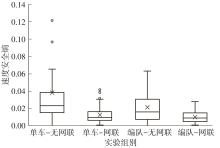
Fig.15
Speed Entropy distribution characteristics of Platoon"


Fig.16
Data distribution characterization of platoon’s speed, acceleration and fuel consumption"

Fig.17
Data distribution characterization of platoon’s speed, acceleration and speed safety entropy"

| 1 | 国家统计局 .中国统计年鉴[M].北京:中国统计出版社,2021. |
| 2 | 生态环境部 .中国移动源环境管理年报(2022)[R].北京:生态环境部,2022. |
| 3 | 李鹏飞,罗禹贡,刘畅,等 .智能网联车辆队列紧急工况控制策略设计[J].汽车工程,2022,44(3):299-307,318. |
| LI Pengfei, LUO Yugong, LIU Chang,et al .Control strategies design of intelligent and connected vehicle platoon under emergency conditions[J].Automotive Engineering,2022,44(3):299-307,318. | |
| 4 | DAI Y, WANG C, XIE Y .Explicitly incorporating surrogate safety measures into connected and automated vehicle longitudinal control objectives for enhancing platoon safety[J].Accident Analysis & Prevention,2023,183,106975/1-21. |
| 5 | FU Q, WU Y, ZHAO X,et al .Multivariate effectiveness of ecolane and ecoHMI based cooperative vehicle-infrastructure system[J].International Journal of Automotive Technology,2023,24(1):219-239. |
| 6 | RUAN T, ZHOU L, WANG H .Stability of heterogeneous traffic considering impacts of platoon management with multiple time delays[J].Physica A:Statistical Mechanics and Its Applications,2021,583:126294/1-13. |
| 7 | 廖若桦 .车路协同环境下信号交叉口车队生态驾驶研究[D].北京:北京交通大学,2018. |
| 8 | CHEN Y, ZHA Q, JING P,et al .Modeling and gender difference analysis of acceptance of cooperative vehicle infrastructure system[J].Journal of Southeast University (English Edition),2021,37(2):216-221. |
| 9 | ,公路路线设计规范 [S]. |
| 10 | ,道路交通标志和标线 [S]. |
| 11 | YELCHURU B, FITZGEREL S, MURARI S,et al .AERIS-applications for the environment:real-time information synthesis:eco-lanes operational scenario modeling report[R].Washington D C:U.S. Department of Transportation,Intelligent Transportation Systems Joint Program Office,2014. |
| 12 | BEZA A D, ZEFREH M M, TOROK A,et al .How PTV VISSIM has been calibrated for the simulation of automated vehicles in literature?[J].Advances in Civil Engineering,2022,2022:2548175/1-18. |
| 13 | CAMPBELL L, BROWN L, GRAVING S,et al .Human factors design guidance for level 2 and level 3 automated driving concepts[R].Washington D C:National Highway Traffic Safety Administration,2018. |
| 14 | 戴一康 .基于NUI的智能车载助理系统人机界面设计研究[D].南京:东南大学,2019. |
| 15 | ,Ergonomics of human-system interaction—part 210:human-centered design for interactive systems [S]. |
| 16 | 郭景华,李文昌,罗禹贡,等 .基于深度强化学习的驾驶员跟车模型研究[J].汽车工程,2021,43(4):571-579. |
| GUO Jinghua, LI Wenchang, LUO Yugong,et al.Driver car-following model based on deep reinforcement learning[J].Automotive Engineering,2021,43(4):571-579. | |
| 17 | HUCHO W, SOVRAN G .Aerodynamics of road vehicles[J].Annual Review of Fluid Mechanics,1993,25:485-537. |
| 18 | HUSSEIN A, RAKHA H .Vehicle platooning impact on drag coefficients and energy/fuel saving implications[J].IEEE Transactions on Vehicular Technology,2022,71(2):1199-1208. |
| 19 | 伍毅平,赵晓华,荣建,等 .基于驾驶模拟实验的生态驾驶行为节能减排潜力[J].北京工业大学学报,2015,41(8):1212-1218. |
| WU Yi-ping, ZHAO Xiao-hua, RONG Jian,et al .Potential of eco-driving in reducing fuel consumption and emissions based on a driving simulator[J].Journal of Beijing University of Technology,2015,41(8):1212-1218. | |
| 20 | 赵晓华,董文慧,李佳,等 .基于驾驶行为的隧道交通标志影响特征及作用机理[J].华南理工大学学报(自然科学版),2023,51(4):88-100. |
| ZHAO Xiaohua, DONG Wenhui, LI Jia,et al .Influence characteristics and action mechanism of tunnel traffic sians based on driving behavior[J].Journal of South China University of Technology (Natural Science Edition),2023,51(4):88-100. | |
| 21 | 张建华,赵晓华,欧居尚,等 .雾天桥梁可变限速值的效用评估及优化[J].华南理工大学学报(自然科学版),2024,52(1):127-138. |
| ZHANG Jianhua, ZHAO Xiaohua, Jushang OU,et al .Evaluation of utility and optimal of variable speed limit value for bridge in foggy condition[J].Journal of South China University of Technology (Natural Science Edition),2024,52(1):127-138. | |
| 22 | 赵晓华,许士丽,荣建,等 .基于ROC曲线的驾驶疲劳脑电样本篇判定值研究[J].西南交通大学学报,2013,48(1):178-183. |
| ZHAO Xiaohua, XU Shili, RONG Jian,et al .Discriminating threshold of driving fatigue based on the electroencephalography sample entropy by receiver ope-rating characteristic curve analysis[J].Journal of Southwest Jiaotong University,2013,48(1):178-183. | |
| 23 | 罗旭,王宏,王福旺 .基于脑电信号分类的高速公路上驾驶疲劳识别[J].汽车工程,2015,37(2):230-234. |
| LUO Xu, WANG Hong, WANG Fuwang .Driver fatigue recognition in highway driving based on EEG signal classification[J].Automotive Engineering,2015,37(2):230-234. | |
| 24 | 刘志强,张凯铎,倪捷 .基于自然驾驶跟车数据的驾驶人差异性分析与辨识[J].交通运输系统工程与信息,2021,21(1):48-55. |
| LIU Zhi-qiang, ZHANG Kai-duo, NI Jie .Analysis and identification of drivers’ difference in car following condition based on naturalistic driving data[J].Journal of Transportation Systems Engineering and Information Technology,2021,21(1):48-55. |
| [1] | HE Qingling, PEI Yulong, DONG Chuntong, et al. Classification and Identification of Risky Driving Behavior Based on Hybrid Strategy Improved ASO-LSSVM [J]. Journal of South China University of Technology(Natural Science Edition), 2024, 52(9): 131-141. |
| [2] | CHEN Bingshuo, LI Yang, ZHAO Xiaohua, et al. Study on Evaluation and Influencing Factors of Cognitive Driving Ability in Elderly Drivers [J]. Journal of South China University of Technology(Natural Science Edition), 2024, 52(9): 142-152. |
| [3] | GAO Longkai, ZHAO Xiaohua, OU Jushang, et al. Optimization Design of the Stereoscopic Compound Expressway Sign System Based on Unity3D [J]. Journal of South China University of Technology(Natural Science Edition), 2024, 52(5): 20-30. |
| [4] | ZHANG Ting, CHEN Feng, LI Huang, et al. Evaluation of the Effect of Self-luminous Road Marking in Expressway Weaving Section Based on Driving Behavior [J]. Journal of South China University of Technology(Natural Science Edition), 2024, 52(11): 106-117. |
| [5] | ZHAO Xiaohua, DONG Wenhui, LI Jia, et al. Influence Characteristics and Action Mechanism of Tunnel Traffic Signs Based on Driving Behavior [J]. Journal of South China University of Technology(Natural Science Edition), 2023, 51(4): 88-100. |
| [6] | GUO Miao, ZHAO Xiaohua, YAO Ying, et al. Study on Accident Risk Based on Driving Behavior and Traffic Operating Status [J]. Journal of South China University of Technology(Natural Science Edition), 2022, 50(9): 29-38. |
| [7] | BIAN Yang, YU Jie ZHAO, Xiaohua, et al. Research on the Comprehensive Influence of Navigation BroadcastWording on Driving Behavior [J]. Journal of South China University of Technology (Natural Science Edition), 2020, 48(11): 30-37,54. |
| [8] | FU Xinsha DU Jintao HE Shijian. Effects of Guide Distance and Initial Speed on Driving Behavior at Expressway Exit [J]. Journal of South China University of Technology (Natural Science Edition), 2019, 47(11): 1-9. |
| [9] | Cao Bao-gui Yang Zhao-sheng. An Improved Car-Following Dynamic Model [J]. Journal of South China University of Technology (Natural Science Edition), 2011, 39(10): 96-99,131. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||