Journal of South China University of Technology(Natural Science Edition) ›› 2023, Vol. 51 ›› Issue (10): 46-67.doi: 10.12141/j.issn.1000-565X.230200
Special Issue: 2023绿色智慧交通系统专辑
• Green, Intelligent Traffic System • Previous Articles Next Articles
Research Progress on Key Technologies in the Cooperative Vehicle Infrastructure System
LIN Hongyi1 LIU Yang1 LI Shen2 QU Xiaobo1
- 1.School of Vehicle and Mobility,Tsinghua University,Beijing 100084,China
2.School of Civil Engineering,Tsinghua University,Beijing 100084,China
-
Received:2023-04-09Online:2023-10-25Published:2023-06-26 -
Contact:刘洋(1991-),男,博士,助理研究员,主要从事机器学习与智能交通系统研究;李深(1989-),男,博士,助理研究员,主要从事智能交通系统与智能车辆研究。 E-mail:thu_ets_lab@tsinghua.edu.cn;sli299@tsinghua.edu.cn -
About author:林泓熠(1999-),男,博士生,主要从事智慧车辆与智能交通系统研究。E-mail:hy-lin22@mails.tsinghua.edu.cn -
Supported by:the National Natural Science Foundation of China(52220105001)
CLC Number:
Cite this article
LIN Hongyi, LIU Yang, LI Shen, et al. Research Progress on Key Technologies in the Cooperative Vehicle Infrastructure System[J]. Journal of South China University of Technology(Natural Science Edition), 2023, 51(10): 46-67.
share this article
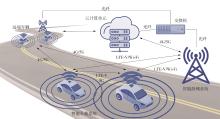
Fig.1
Typical intelligent connected environment in CVIS"
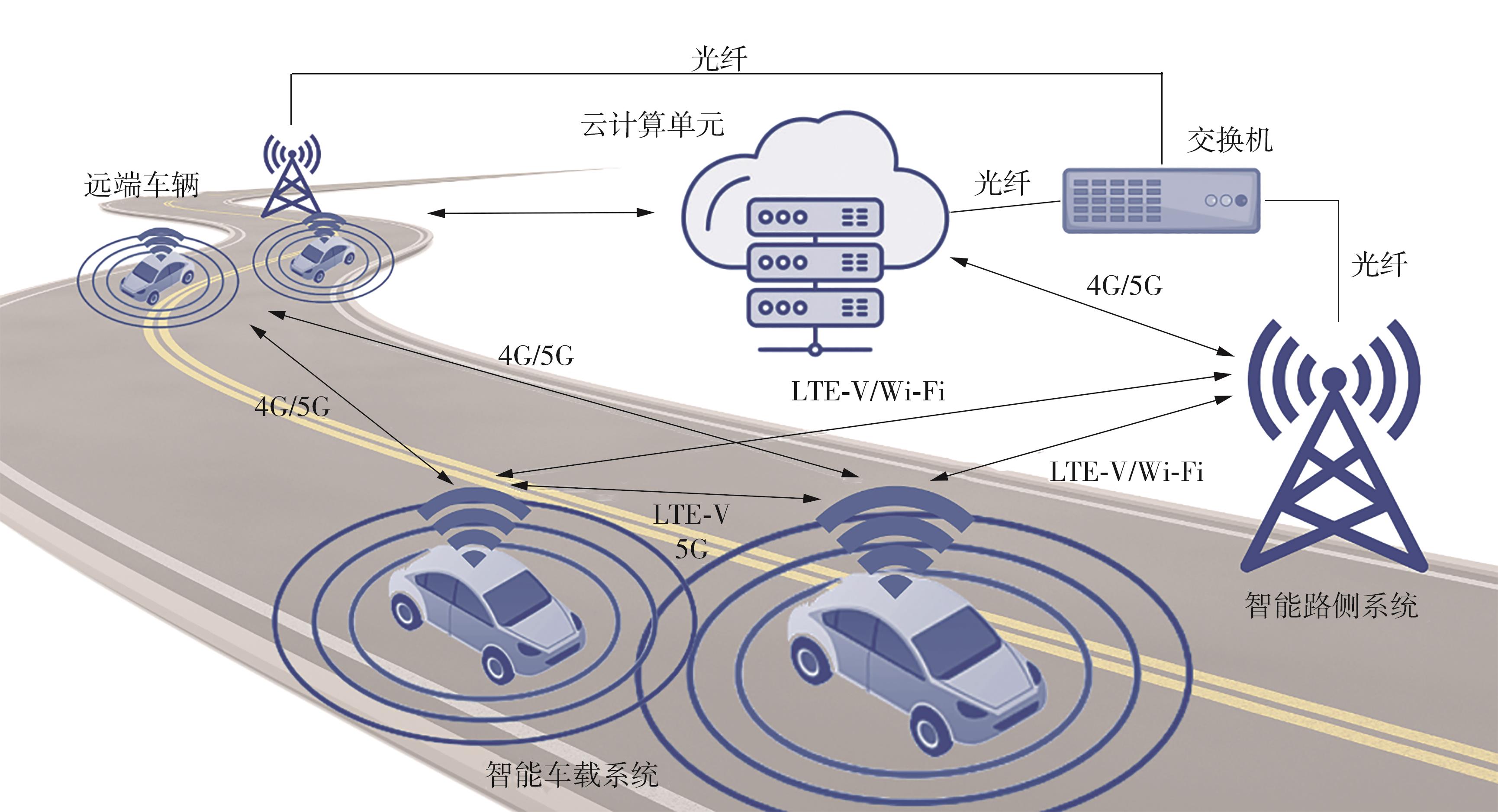
Fig.2
Basic structure of CVIS"
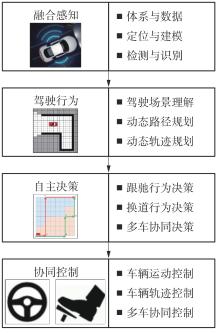
Fig.3
Key technologies and main research contents in CVIS"

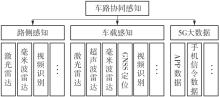
Fig.4
Architecture of the fusion perception system in CVIS"

Table 1
Advantages and disadvantages of vehicle path planning methods"
| 算法类别 | 算法名称 | 优点 | 缺点 |
|---|---|---|---|
| 传统算法 | 图搜索法 | 适合全局路径规划 | 环境建模复杂,算法收敛速度慢 |
| 曲线插值法 | 规划的路径较平滑且曲率连续 | 评价函数的求解速度较慢 | |
| 人工势场法 | 规划的路径平滑且安全 | 易陷入局部最优,难以描述复杂环境 | |
| 群体智能优化法 | 寻找全局最优的能力强 | 收敛速度慢,易陷入局部最优 | |
| 机器学习算法 | 直接策略学习法 | 可缓解数据不足导致的各类限制,可修复当前错误 | 查询效率低,数据收集器不准确,泛化能力较差 |
| 强化学习法 | 可从反馈中进行连续学习和优化,生成能够适应复杂环境的路径规划策略 | 需要大量的计算资源和训练时间 | |
| 并行学习法 | 能在虚拟和真实环境中同时进行学习,学习效率高,决策速度快 | 需要复杂的计算架构和算法设计 |
Table 2
Advantages and disadvantages of vehicle trajectory planning methods"
| 算法 | 优点 | 缺点 |
|---|---|---|
| 采样方法 | 适用于高维度非线性问题,不需全局信息和先验知识 | 需大量采样点,其数量和质量对结果影响大,计算成本高 |
| 曲线插值法 | 可调整路径的形状,计算成本低,适用于实时规划 | 难处理复杂环境下的规划,依赖初始路径,易出现局部最优解 |
| 数值优化法 | 可处理复杂环境下的路径规划问题,并满足特定需求 | 计算成本高,不适用于实时规划,对初值的选择较敏感 |
| 深度强化学习法 | 可适应多种环境和任务,结合传感器信息和周围环境来进行规划 | 需大量数据和计算资源,会出现数据偏差和模型不可解释等问题 |
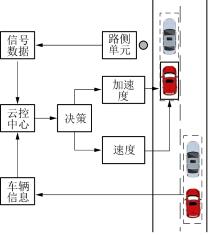
Fig.5
Cooperative car-following scenario"
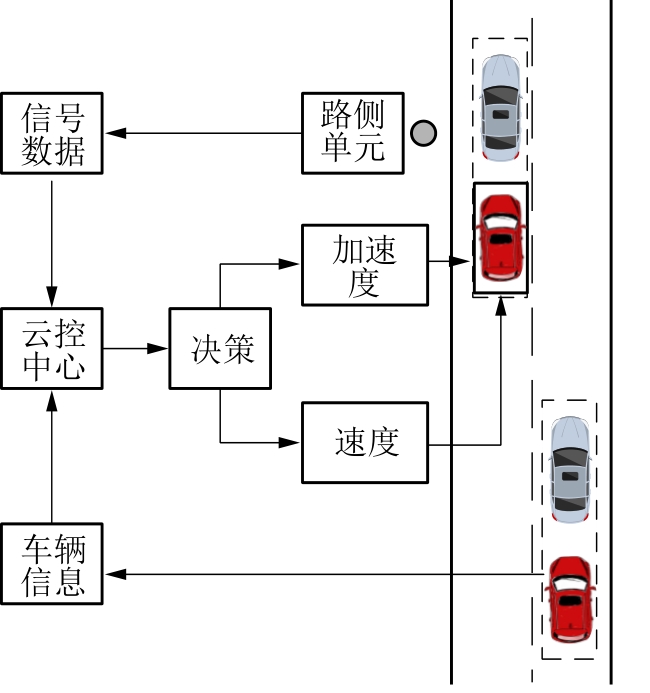
Fig.6
Vehicle lane-changing decision scenario"
| 1 | 曲小波,刘亚君,陈雨薇,等 .城市电动公交车辆运营管理:综述与展望[J].汽车安全与节能学报,2022,13(3):407-420. |
| QU Xiaobo, LIU Yajun, CHEN Yuwei,et al .Urban electric bus operation management:review and outlook[J].Journal of Automotive Safety and Energy,2022,13(3):407-420. | |
| 2 | XU M, LIN H, LIU Y .A deep learning approach for vehicle velocity prediction considering the influence factors of multiple lanes[J].Electronic Research Archive,2023,31(1):401-420. |
| 3 | 秦严严,王昊,王炜,等 .混有 CACC 车辆和 ACC 车辆的异质交通流基本图模型[J].中国公路学报,2017,30(10):127-136. |
| QIN Yanyan, WANG Hao, WANG Wei,et al .Fundamental diagram model of heterogeneous traffic flow mixed with cooperative adaptive cruise control vehicles and adaptive cruise control vehicles[J].China Journal of Highway and Transport,2017,30(10):127-136. | |
| 4 | 张毅,姚丹亚,李力,等 .智能车路协同系统关键技术与应用[J].交通运输系统工程与信息,2021,21(5):40-51. |
| ZHANG Yi, YAO Danya, LI Li,et al .Technologies and applications for intelligent vehicle-infrastructure cooperation systems[J].Journal of Transportation Systems Engineering and Information Technology,2021,21(5):40-51. | |
| 5 | 丁飞,张楠,李升波,等 .智能网联车路云协同系统架构与关键技术研究综述[J].自动化学报,2022,48(12):2863-2885. |
| DING Fei, ZHANG Nan, LI Shengbo,et al .A survey of architecture and key technologies of intelligent connected vehicle-road-cloud cooperation system[J].Acta Automatica Sinica,2022,48(12):2863-2885. | |
| 6 | TIAN D, ZHANG C, DUAN X,et al .An automatic car accident detection method based on cooperative vehicle infrastructure systems[J].IEEE Access,2019,7:127453-127463. |
| 7 | ZHOU J, TIAN D, WANG Y,et al .Reliability-optimal cooperative communication and computing in connected vehicle systems[J].IEEE Transactions on Mobile Computing,2019,19(5):1216-1232. |
| 8 | 张新钰,邹镇洪,李志伟,等 .面向自动驾驶目标检测的深度多模态融合技术[J].智能系统学报,2020,15(4):758-771. |
| ZHANG Xinyu, ZOU Zhenghong, LI Zhiwei,et al .Deep multi-modal fusion in object detection for autonomous driving[J].CAAI Transactions on Intelligent Systems,2020,15(4):758-771. | |
| 9 | KIM T, GHOSH J .Robust detection of non-motorized road users using deep learning on optical and lidar data[C]∥Proceedings of the 2016 IEEE 19th International Conference on Intelligent Transportation Systems (ITSC).Piscatway,NJ:IEEE,2016:271-276. |
| 10 | YU H, LUO Y, SHU M,et al .Dair-v2x:A large-scale dataset for vehicle-infrastructure cooperative 3d object detection[C]∥Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition.Piscatway,NJ:2022:21361-21370. |
| 11 | VERONESE L D P, GUIVANT J, CHEEIN F A A,et al .A light-weight yet accurate localization system for autonomous cars in large-scale and complex environments[C]∥Proceedings of the 2016 IEEE 19th International Conference on Intelligent Transportation Systems (ITSC).Piscatway,NJ:IEEE,2016:520-525. |
| 12 | XU Y, JOHN V, MITA S,et al .3D point cloud map based vehicle localization using stereo camera[C]∥Proceedings of the 2017 IEEE Intelligent Vehicles Symposium (IV).Piscatway,NJ:IEEE,2017:487-492. |
| 13 | BRUBAKER M A, GEIGER A, URTASUN R .Map-based probabilistic visual self-localization[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,2015,38(4):652-665. |
| 14 | CARNEIRO R V, NASCIMENTO R C, GUIDOLINI R,et al .Mapping road lanes using laser remission and deep neural networks[C]∥Proceedings of the 2018 International Joint Conference on Neural Networks (IJCNN).Piscatway,NJ:IEEE,2018:1-8. |
| 15 | BASTANI F, HE S, ABBAR S,et al .Roadtracer:Automatic extraction of road networks from aerial images[C]∥Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition.Piscatway,NJ:IEEE,2018:4720-4728. |
| 16 | 安鑫,蔡伯根,上官伟 .车路协同路侧感知融合方法的研究[J].测控技术,2022,41(2):1-12. |
| AN Xin, CAI Bogen, SHANGGUAN Wei .Vehicle road cooperative roadside perception fusion method[J].Measurement & Control Technology,2022,41(2):1-12. | |
| 17 | FERNANDES L C, SOUZA J R, PESSIN G,et al .CaRINA intelligent robotic car:architectural design and applications[J].Journal of Systems Architecture,2014,60(4):372-392. |
| 18 | JENSEN M B, PHILIPSEN M P, MøGELMOSE A,et al .Vision for looking at traffic lights:issues,survey,and perspectives[J].IEEE Transactions on Intelligent Transportation Systems,2016,17(7):1800-1815. |
| 19 | GURGHIAN A, KODURI T, BAILUR S V,et al .Deeplanes:End-to-end lane position estimation using deep neural networksa[C]∥Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition Workshops.Piscatway,NJ:IEEE,2016:38-45. |
| 20 | WU T, RANGANATHAN A .A practical system for road marking detection and recognition[C]∥Proceedings of the 2012 IEEE Intelligent Vehicles Symposium.Piscatway,NJ:IEEE,2012:25-30. |
| 21 | WEN C, SUN X, LI J,et al .A deep learning framework for road marking extraction,classification and completion from mobile laser scanning point clouds[J].ISPRS Journal of Photogrammetry and Remote Sensing,2019,147:178-192. |
| 22 | BERRIEL R F, ROSSI F S, DE SOUZA A F,et al .Automatic large-scale data acquisition via crowdsourcing for crosswalk classification:a deep learning approach[J].Computers & Graphics,2017,68:32-42. |
| 23 | MENZEL T, BAGSCHIK G, MAURER M .Scenarios for development,test and validation of automated vehicles[C]∥Proceedings of the 2018 IEEE Intelligent Vehicles Symposium (IV).Piscatway,NJ:IEEE,2018:1821-1827. |
| 24 | MURPHEY Y L, MILTON R, KILIARIS L .Driver’s style classification using jerk analysis[C]∥Proceedings of the 2009 IEEE Workshop on Computational Intelligence in Vehicles and Vehicular Systems.Piscatway,NJ:IEEE,2009:23-28. |
| 25 | CONSTANTINESCU Z, MARINOIU C, VLADOIU M .Driving style analysis using data mining techniques[J].International Journal of Computers Communications & Control,2010,5(5):654-663. |
| 26 | BOLOVINOU A, BAKAS I, AMDITIS A,et al .Online prediction of an electric vehicle remaining range based on regression analysis[C]∥Proceedings of the 2014 IEEE International Electric Vehicle Conference (IEVC).Piscatway,NJ:IEEE,2014:1-8. |
| 27 | YURTSEVER E, MIYAJIMA C, TAKEDA K .A traffic flow simulation framework for learning driver heterogeneity from naturalistic driving data using autoencoders[J].International Journal of Automotive Engineering,2019,10(1):86-93. |
| 28 | SAMA K, MORALES Y, AKAI N,et al .Driving feature extraction and behavior classification using an autoencoder to reproduce the velocity styles of experts[C]∥Proceedings of the 2018 21st International Conference on Intelligent Transportation Systems (ITSC).Piscatway,NJ:IEEE,2018:1337-1343. |
| 29 | ROSS S, GORDON G, BAGNELL D .A reduction of imitation learning and structured prediction to no-regret online learning[C]∥Proceedings of the 14th International Conference on Artificial Intelligence and Statistics.FL,USA:JMLR Workshop and Conference Proceedings,2011:627-635. |
| 30 | HE H, EISNER J, DAUME H .Imitation learning by coaching[J].Advances in Neural Information Processing Systems,2012,25:1-8. |
| 31 | ZHANG J, CHO K .Query-efficient imitation learning for end-to-end autonomous driving[C]∥Proceedings of the AAAI Conference on Artificial Intelligence.Phoenix,Arizona,USA:AAAI,2016. |
| 32 | HOQUE R, BALAKRISHNA A, NOVOSELLER E,et al. ThriftyDAgger:budget-aware novelty and risk gating for interactive imitation learning[C]∥Conference on Robot Learning.[S.l.]:PMLR,2022:598-608. |
| 33 | YAN C, QIN J, LIU Q,et al .Mapless navigation with safety-enhanced imitation learning[J].IEEE Transactions on Industrial Electronics,2022,70(7):7073-7081. |
| 34 | YE F, CHENG X, WANG P,et al .Automated lane change strategy using proximal policy optimization-based deep reinforcement learning[C]∥Proceedings of the 2020 IEEE Intelligent Vehicles Symposium (IV).Piscatway,NJ:IEEE,2020:1746-1752. |
| 35 | WU Y, LIAO S, LIU X,et al .Deep reinforcement learning on autonomous driving policy with auxiliary critic network[J].IEEE Transactions on Neural Networks and Learning Systems,2023,34(7):3680-3690. |
| 36 | HUANG Z, WU J, LV C .Efficient deep reinforcement learning with imitative expert priors for autonomous driving[J].IEEE Transactions on Neural Networks and Learning Systems,2022:1-13. |
| 37 | CHEN L, HU X, TANG B,et al .Parallel motion planning:Learning a deep planning model against emergencies[J].IEEE Intelligent Transportation Systems Magazine,2018,11(1):36-41. |
| 38 | 郭奕璀,蒋涛,张葛祥 .基于动态窗口和绕墙走的自动垂直泊车轨迹规划[J].交通信息与安全,2017(1):92-97. |
| GUO Yicui, JIANG Tao, ZHANG Gexiang .Trajectory planning for automatic vertical parking based on dynamic window and wall following approach[J].Journal of Transport Information and Safety,2017(1):92-97. | |
| 39 | 杨刚,张东好,李克强,等 .基于车车通信的车辆并行协同自动换道控制[J].公路交通科技,2017,34(1):120-129. |
| YANG Gang, ZHANG Donghao, LI Keqiang,et al .Cooperative same-direction automated lane-changing based on vehicle-to-vehicle communication[J].Journal of Highway and Transportation Research and Development,2017,34(1):120-129. | |
| 40 | 赵树恩,王金祥,李玉玲 .基于多目标优化的智能车辆换道轨迹规划[J].交通运输工程学报,2021,21(2):232-242. |
| ZHAO Shuen, WANG Jinxiang, LI Yuling .Lane changing trajectory planning of intelligent vehicle based on multiple objective optimization[J].Journal of Traffic and Transportation Engineering,2021,21(2):232-242. | |
| 41 | CHOI S, KIM J,YEO H .Attention-based recurrent neural network for urban vehicle trajectory prediction[J].Procedia Computer Science,2019,151:327-334. |
| 42 | CHEN W, WANG F, SUN H .S2tnet:spatio-temporal transformer networks for trajectory prediction in autonomous driving[C]∥Proceedings of the Asian Conference on Machine Learning.[S.l.]:PMLR,2021:454-469. |
| 43 | MO X, XING Y, LV C .Interaction-aware trajectory prediction of connected vehicles using cnn-lstm networks[C]∥Proceedings of the IECON 2020 the 46th Annual Conference of the IEEE Industrial Electronics Society.Piscatway,NJ:IEEE,2020:5057-5062. |
| 44 | CHANDRA R, GUAN T, PANUGANTI S,et al .Forecasting trajectory and behavior of road-agents using spectral clustering in graph-lstms[J].IEEE Robotics and Automation Letters,2020,5(3):4882-4890. |
| 45 | JEON H, CHOI J,KUM D .Scale-net:Scalable vehicle trajectory prediction network under random number of interacting vehicles via edge-enhanced graph convolutional neural network[C]∥Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS).Piscatway,NJ:IEEE,2020:2095-2102. |
| 46 | GAO J, SUN C, ZHAO H,et al .Vectornet:encoding hd maps and agent dynamics from vectorized representation[C]∥Proceedings of the Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition.Piscatway,NJ:IEEE,2020:11525-11533. |
| 47 | LU Y, WANG W, HU X,et al .Vehicle trajectory prediction in connected environments via heterogeneous context-aware graph convolutional networks[J].IEEE Transactions on Intelligent Transportation Systems,2023,24(8):8452-8464. |
| 48 | 贾洪飞,隽志才,王晓原 .基于神经网络的车辆跟驰模型的建立[J].公路交通科技,2001,18(4):92-94. |
| JIA Hongfei, JUAN Zhicai, WANG Xiaoyuan .Development of a car-following model based on artificial neural networks[J].Journal of Highway and Transportation Research and Development,2001,18(4):92-94. | |
| 49 | CHEN Z, HUANG X .End-to-end learning for lane keeping of self-driving cars[C]∥Proceedings of the 2017 IEEE Intelligent Vehicles Symposium (IV).Piscatway,NJ:IEEE,2017:1856-1860. |
| 50 | YE Y, ZHANG X, SUN J .Automated vehicle’s behavior decision making using deep reinforcement learning and high-fidelity simulation environment[J].Transportation Research Part C:Emerging Technologies,2019,107:155-170. |
| 51 | YU C, WANG X, XU X,et al .Distributed multiagent coordinated learning for autonomous driving in highways based on dynamic coordination graphs[J].IEEE Transactions on Intelligent Transportation Systems,2019,21(2):735-748. |
| 52 | GAO X, LI X, LIU Q,et al .Multi-agent decision-making modes in uncertain interactive traffic scenarios via graph convolution-based deep reinforcement learning[J].Sensors,2022,22(12):4586. |
| 53 | DAI Q, XU X, GUO W,et al .Towards a systematic computational framework for modeling multi-agent decision-making at micro level for smart vehicles in a smart world[J].Robotics and Autonomous Systems,2021,144:103859. |
| 54 | CHAE H, KANG C M, KIM B,et al .Autonomous braking system via deep reinforcement learning[C]∥Proceedings of the 2017 IEEE 20th International Conference on Intelligent Transportation Systems (ITSC).Piscatway,NJ:IEEE,2017:1-6. |
| 55 | SAXENA D M,BAE S, NAKHAEI A,et al .Driving in dense traffic with model-free reinforcement learning[C]∥Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA).Piscatway,NJ:IEEE,2020:5385-5392. |
| 56 | WANG X, XUE Y, CEN B-L,et al .Study on pollutant emissions of mixed traffic flow in cellular automaton[J].Physica A:Statistical Mechanics and its Applications,2020,537:122686. |
| 57 | MA L, QU S, SONG L,et al .Exploring the effect of connected autonomous vehicles in mixed traffic flow[C]∥Proceedings of the 3rd International Conference on Intelligent Computing and Human-Computer Interaction (ICHCI 2022).Guangzhou:SPIE,2023,12509:201-206. |
| 58 | PAPADOULIS A, QUDDUS M, IMPRIALOU M .Evaluating the safety impact of connected and autonomous vehicles on motorways[J].Accident Analysis & Prevention,2019,124:12-22. |
| 59 | ZHENG F, LIU C, LIU X,et al .Analyzing the impact of automated vehicles on uncertainty and stability of the mixed traffic flow[J].Transportation Research Part C:Emerging Technologies,2020,112:203-219. |
| 60 | RAHMATI Y, KHAJEH HOSSEINI M, TALEBPOUR A,et al .Influence of autonomous vehicles on car-following behavior of human drivers[J].Transportation Research Record,2019,2673(12):367-379. |
| 61 | ZHAO X, WANG Z, XU Z,et al .Field experiments on longitudinal characteristics of human driver behavior following an autonomous vehicle[J].Transportation Research Part C:Emerging Technologies,2020,114:205-224. |
| 62 | WEN X, CUI Z, JIAN S .Characterizing car-following behaviors of human drivers when following automated vehicles using the real-world dataset[J].Accident Analysis & Prevention,2022,172:106689. |
| 63 | 杨澜,赵祥模,吴国垣,等 .智能网联汽车协同生态驾驶策略综述[J].交通运输工程学报,2020,20(5):58-72. |
| YANG Lan, ZHAO Xiangmo, WU Guoyuan,et al .Review on connected and automated vehicles based cooperative eco-driving strategies[J].Journal of Traffic and Transportation Engineering,2020,20(5):58-72. | |
| 64 | LAN X, DI CAIRANO S .Continuous curvature path planning for semi-autonomous vehicle maneuvers using RRT[C]∥Proceedings of the 2015 European Control Conference (ECC).Piscatway,NJ:IEEE,2015:2360-2365. |
| 65 | YANG I, KIM H J, JEON W H,et al .Development of realistic shortest path algorithm considering lane changes[J].Journal of Advanced Transportation,2016,50(4):541-551. |
| 66 | LUO Y, XIANG Y, CAO K,et al .A dynamic automated lane change maneuver based on vehicle-to-vehicle communication[J].Transportation Research Part C:Emerging Technologies,2016,62:87-102. |
| 67 | HUANG Z, WU Q, MA J,et al .An APF and MPC combined collaborative driving controller using vehicular communication technologies[J].Chaos,Solitons & Fractals,2016,89:232-242. |
| 68 | XU G, LIU L,OU Y,et al .Dynamic modeling of driver control strategy of lane-change behavior and trajectory planning for collision prediction[J].IEEE Transactions on Intelligent Transportation Systems,2012,13(3):1138-1155. |
| 69 | ZHENG J, SUZUKI K, FUJITA M .Predicting driver’s lane-changing decisions using a neural network model[J].Simulation Modelling Practice and Theory,2014,42:73-83. |
| 70 | XIE D F, FANG Z Z, JIA B,et al .A data-driven lane-changing model based on deep learning[J].Transportation Research Part C:Emerging Technologies,2019,106:41-60. |
| 71 | CODEVILLA F, MüLLER M, LóPEZ A,et al .End-to-end driving via conditional imitation learning[C]∥Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA).Piscatway,NJ:IEEE,2018:4693-4700. |
| 72 | ZHAO J, QU T, XU F .A deep reinforcement learning approach for autonomous highway driving[J].IFAC-PapersOnLine,2020,53(5):542-546. |
| 73 | SCHULMAN J, WOLSKI F, DHARIWAL P,et al .Proximal policy optimization algorithms[J].arXiv preprint arXiv:170706347,2017. |
| 74 | MUHAMMAD A, ELHATTAB M, ARFAOUI M A,et al .Age of information optimization in a ris-assisted wireless network[J].arXiv preprint arXiv:210306405,2021. |
| 75 | XU W, LIU Y, YI H,et al .Lane-changing decision model for autonomous vehicle under mixed traffic environment[C]∥Proceedings of the Sixth International Conference on Traffic Engineering and Transportation System (ICTETS 2022).Guangzhou:SPIE,2023,12591:768-774. |
| 76 | LIU Q, LI Z, LI X,et al .Graph convolution-based deep reinforcement learning for multi-agent decision-making in mixed traffic environments[J].arXiv preprint arXiv:220112776,2022. |
| 77 | PEI H, ZHANG Y, ZHANG Y,et al .Optimal cooperative driving at signal-free intersections with polynomial-time complexity[J].IEEE Transactions on Intelligent Transportation Systems,2021,23(8):12908-12920. |
| 78 | LI L, WANG F-Y .Cooperative driving at adjacent blind intersections[C]∥Proceedings of the 2005 IEEE International Conference on Systems,Man and Cybernetics.Piscatway,NJ:IEEE,2005:847-852. |
| 79 | WANG Y, CAI P, LU G .Cooperative autonomous traffic organization method for connected automated vehicles in multi-intersection road networks[J].Transportation Research Part C:Emerging Technologies,2020,111:458-476. |
| 80 | NTOUSAKIS I A, PORFYRI K, NIKOLOS I K,et al .Assessing the impact of a cooperative merging system on highway traffic using a microscopic flow simulator[C]∥Proceedings of the ASME International Mechanical Engineering Congress and Exposition.Montreal:American Society of Mechanical Engineers,2014,46613:P.V012T15A024. |
| 81 | XU B, LI S E, BIAN Y,et al .Distributed conflict-free cooperation for multiple connected vehicles at unsignalized intersections[J].Transportation Research Part C:Emerging Technologies,2018,93:322-334. |
| 82 | DING J, PEI H, HU J,et al .Cooperative adaptive cruise control in vehicle platoon under environment of i-VICS[C]∥Proceedings of the 2018 21st International Conference on Intelligent Transportation Systems (ITSC).Piscatway,NJ:IEEE,2018:1246-1251. |
| 83 | PEI H, ZHANG Y, TAO Q,et al .Distributed cooperative driving in multi-intersection road networks[J].IEEE Transactions on Vehicular Technology,2021,70(6):5390-5403. |
| 84 | WANG Z, WU G, HAO P,et al .Developing a platoon-wide eco-cooperative adaptive cruise control (CACC) system[C]∥Proceedings of the 2017 IEEE Intelligent Vehicles Symposium (IV).Piscatway,NJ:IEEE,2017:1256-1261. |
| 85 | GUO G, YANG D, ZHANG R .Distributed trajectory optimization and platooning of vehicles to guarantee smooth traffic flow[J].IEEE Transactions on Intelligent Vehicles,2022,8(1):684-695. |
| 86 | RAJAMANI R, TAN H-S, LAW B K,et al .Demonstration of integrated longitudinal and lateral control for the operation of automated vehicles in platoons[J].IEEE Transactions on Control Systems Technology,2000,8(4):695-708. |
| 87 | 冀杰,李以农,郑玲,等 .车辆自动驾驶系统纵向和横向运动综合控制[J].中国公路学报,2010,23(5):119-126. |
| JI Jie, LI Yinong, ZHENG Ling,et al .Integrated control of longitudinal and lateral motion for autonomous vehicle driving system[J].China Journal of Highway and Transport,2010,23(5):119-126. | |
| 88 | LEE H, TOMIZUKA M .Coordinated longitudinal and lateral motion control of vehicles for IVHS[J].Journal of Dynamic Systems,Measurement and Control,2001,123(3):535-543. |
| 89 | KUMARAWADU S, LEE T T .Neuroadaptive combined lateral and longitudinal control of highway vehicles using RBF networks[J].IEEE Transactions on Intelligent Transportation Systems,2006,7(4):500-512. |
| 90 | 郭景华,罗禹贡,李克强 .智能电动车辆横纵向协调与重构控制[J].控制理论与应用,2014(9):1238-1244. |
| GUO Jinghua, LUO Yugong, LI Keqiang .Cooperative and reconfigurable lateral and longitudinal control of intelligent electric vehicles[J].Control Theory & Applications,2014(9):1238-1244. | |
| 91 | BUEHLER M, IAGNEMMA K, SINGH S .The DARPA urban challenge:autonomous vehicles in city traffic[M].NY,USA:Springer,2009. |
| 92 | SAMSON C .Path following and time-varying feedback stabilization of a wheeled mobile robot[C]∥Proceedings of the International Conference on Control Automation,Robotics and Vision.Singapore:[s.n.],1992:13. |
| 93 | THRUN S, MONTEMERLO M, DAHLKAMP H,et al .Stanley:The robot that won the DARPA Grand Challenge[J].Journal of Field Robotics,2006,23(9):661-692. |
| 94 | KANAYAMA Y, KIMURA Y, MIYAZAKI F,et al .A stable tracking control method for an autonomous mobile robot[C]∥Proceedings of the IEEE International Conference on Robotics and Automation.Piscatway,NJ:IEEE,1990. |
| 95 | JIANGDAGGER Z P, NIJMEIJER H .Tracking control of mobile robots:a case study in backstepping[J].Automatica,1997,33(7):1393-1399. |
| 96 | D’ANDRéA-NOVEL B, CAMPION G, BASTIN G .Control of nonholonomic wheeled mobile robots by state feedback linearization[J].The International Journal of Robotics Research,1995,14(6):543-559. |
| 97 | OLLERO A, AMIDI O .Predictive path tracking of mobile robots.Application to the CMU Navlab[C]∥Proceedings of 5th International Conference on Advanced Robotics,Robots in Unstructured Environments. Pisa:ICAR,1991:1081-1086. |
| 98 | KIM E, KIM J, SUNWOO M .Model predictive control strategy for smooth path tracking of autonomous vehicles with steering actuator dynamics[J].International Journal of Automotive Technology,2014,15:1155-1164. |
| 99 | FALCONE P, BORRELLI F, TSENG H E,et al .Linear time‐varying model predictive control and its application to active steering systems:stability analysis and experimental validation[J].International Journal of Robust and Nonlinear Control:IFAC‐Affiliated Journal,2008,18(8):862-875. |
| 100 | PAN J, XU Q, LI K,et al .Controller design for V2X application under unreliable feedback channel[C]∥Proceedings of the 2019 IEEE Intelligent Transportation Systems Conference (ITSC).Piscatway,NJ:IEEE,2019:2496-2502. |
| 101 | CAI M, XU Q, LI K,et al .Multi-lane formation assignment and control for connected vehicles[C]∥Proceedings of the 2019 IEEE Intelligent Vehicles Symposium (IV).Piscatway,NJ:IEEE,2019:1968-1973. |
| 102 | ZHENG Y, WANG J, LI K .Smoothing traffic flow via control of autonomous vehicles[J].IEEE Internet of Things Journal,2020,7(5):3882-3896. |
| 103 | WANG J, ZHENG Y, XU Q,et al .Controllability analysis and optimal controller synthesis of mixed traffic systems[C]∥Proceedings of the 2019 IEEE Intelligent Vehicles Symposium (IV).Piscatway,NJ:IEEE,2019:1041-1047. |
| [1] | LI Haijian, ZHAO Guoqiang, YANG Yanfang, et al. Characteristics of Vehicle Spatiotemporal Diagram Under the Emergency Braking Warning [J]. Journal of South China University of Technology (Natural Science Edition), 2020, 48(7): 76-84. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||