华南理工大学学报(自然科学版) ›› 2025, Vol. 53 ›› Issue (6): 44-55.doi: 10.12141/j.issn.1000-565X.240330
分布式驱动电动车辆的驱动防滑多模式控制策略设计
朱绍鹏1,2(), 毛竞扬1, 刘栋青3, 殷玉明4, 陈慧鹏5, 许烨开1
- 1.浙江大学 动力机械及车辆工程研究所,浙江 杭州 310027
2.浙江大学 嘉兴研究院,浙江 嘉兴 314011
3.北京全路通信信号研究设计院集团有限公司,北京 100070
4.浙江工业大学 机械工程学院,浙江 杭州 310023
5.杭州电子科技大学 机械工程学院,浙江 杭州 310018
Design of Acceleration Slip Regulation Multi-Mode Control Strategy of Distributed Drive Electric Vehicle
ZHU Shaopeng1,2(), MAO Jingyang1, LIU Dongqing3, YIN Yuming4, CHEN Huipeng5, XU Yekai1
- 1.Power Machinery & Vehicle Engineering Institute,Zhejiang University,Hangzhou 310027,Zhejiang,China
2.Jiaxing Research Institute,Zhejiang University,Jiaxing 314011,Zhejiang,China
3.CRSC Research & Design Institute Group;Co. ,Ltd. ,Beijing 100070,China
4.College of Mechanical Engineering,Zhejiang University of Technology,Hangzhou 310023,Zhejiang,China
5.School of Mechanical Engineering,Hangzhou Dianzi University,Hangzhou 310018,Zhejiang,China
摘要:
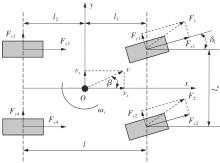
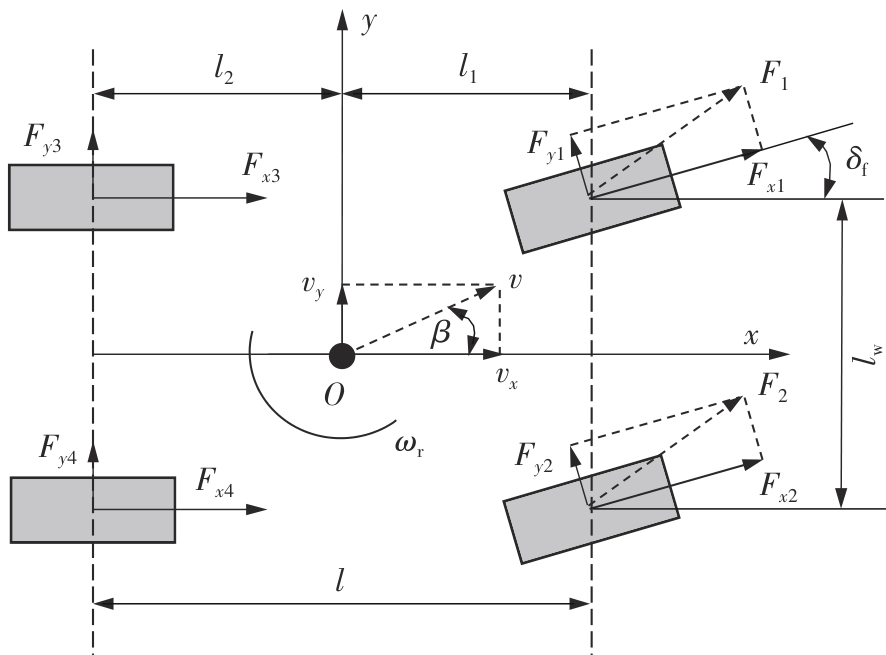
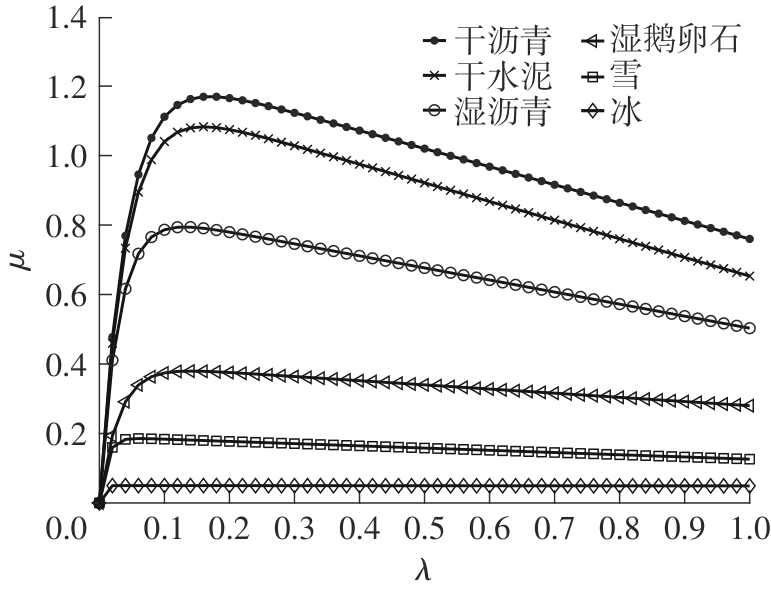
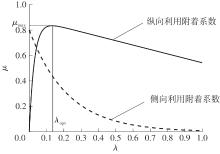
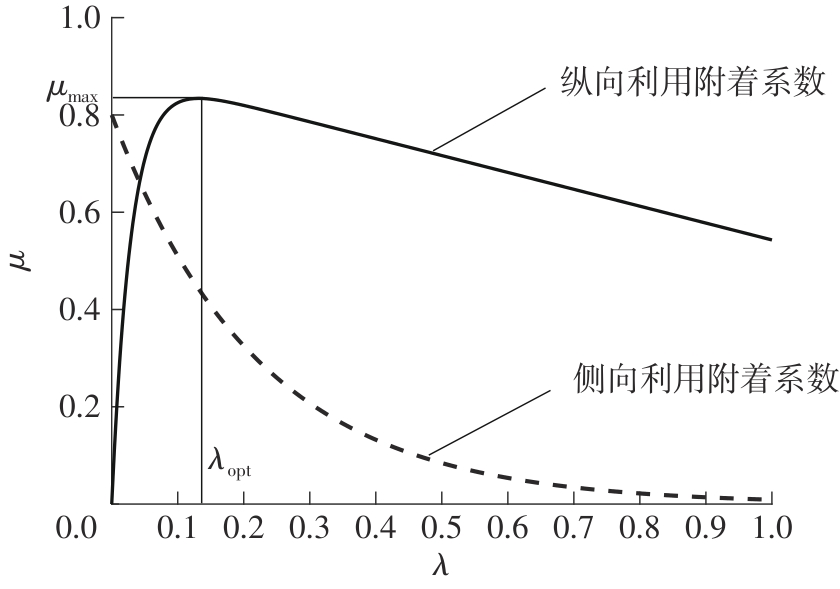
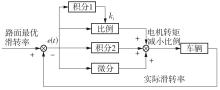
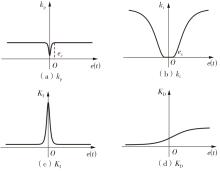
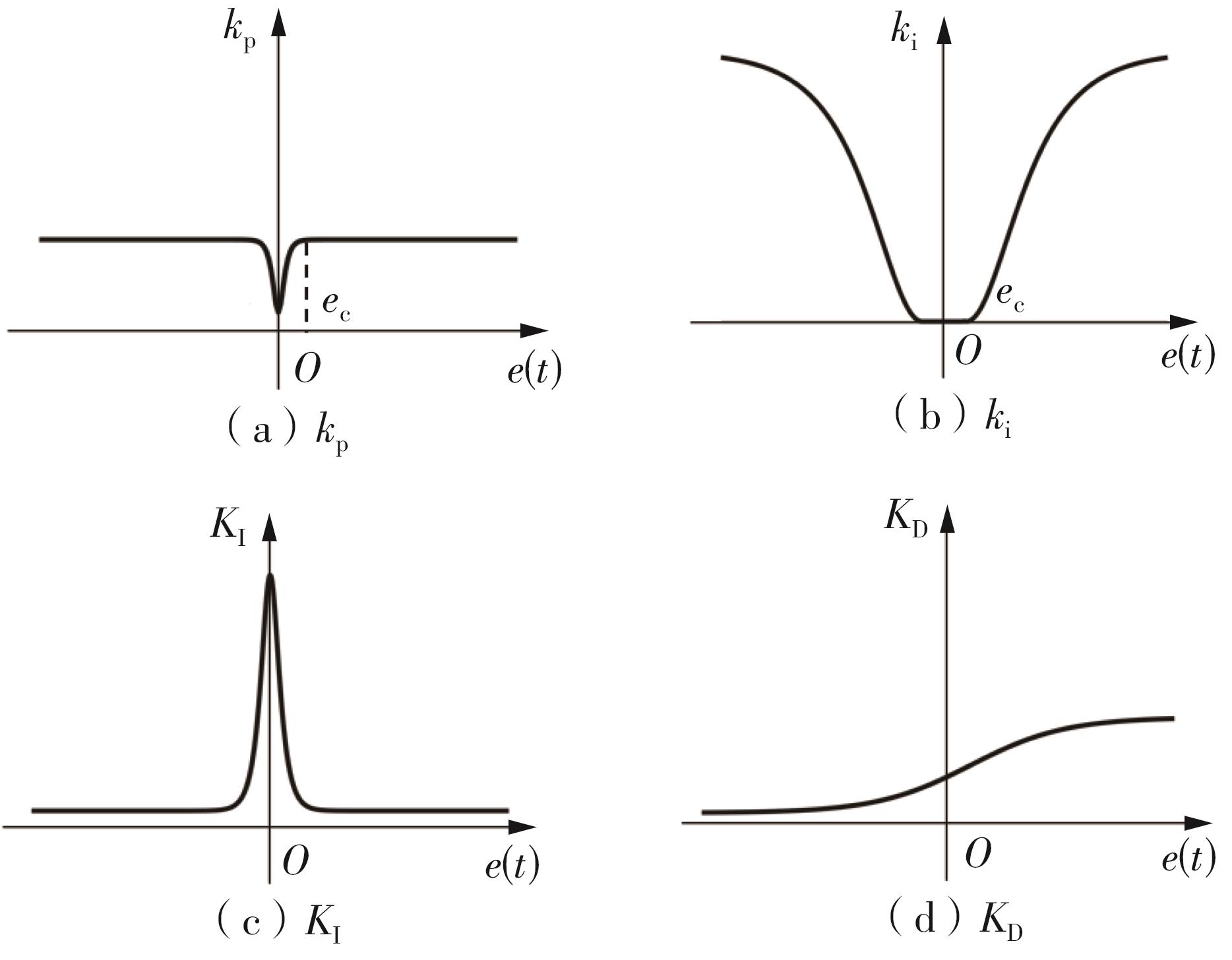
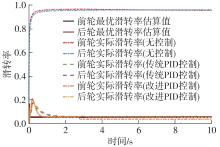
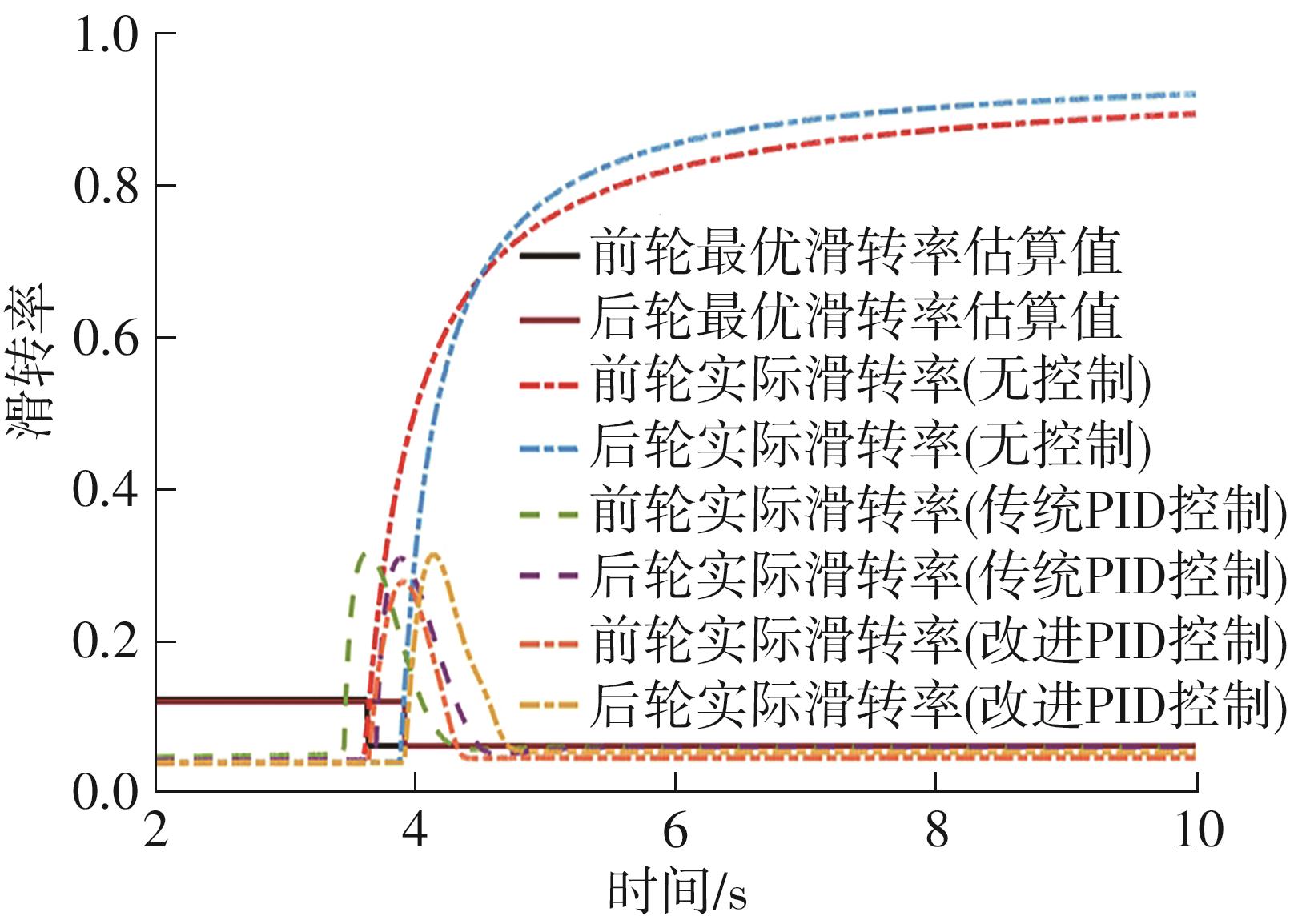
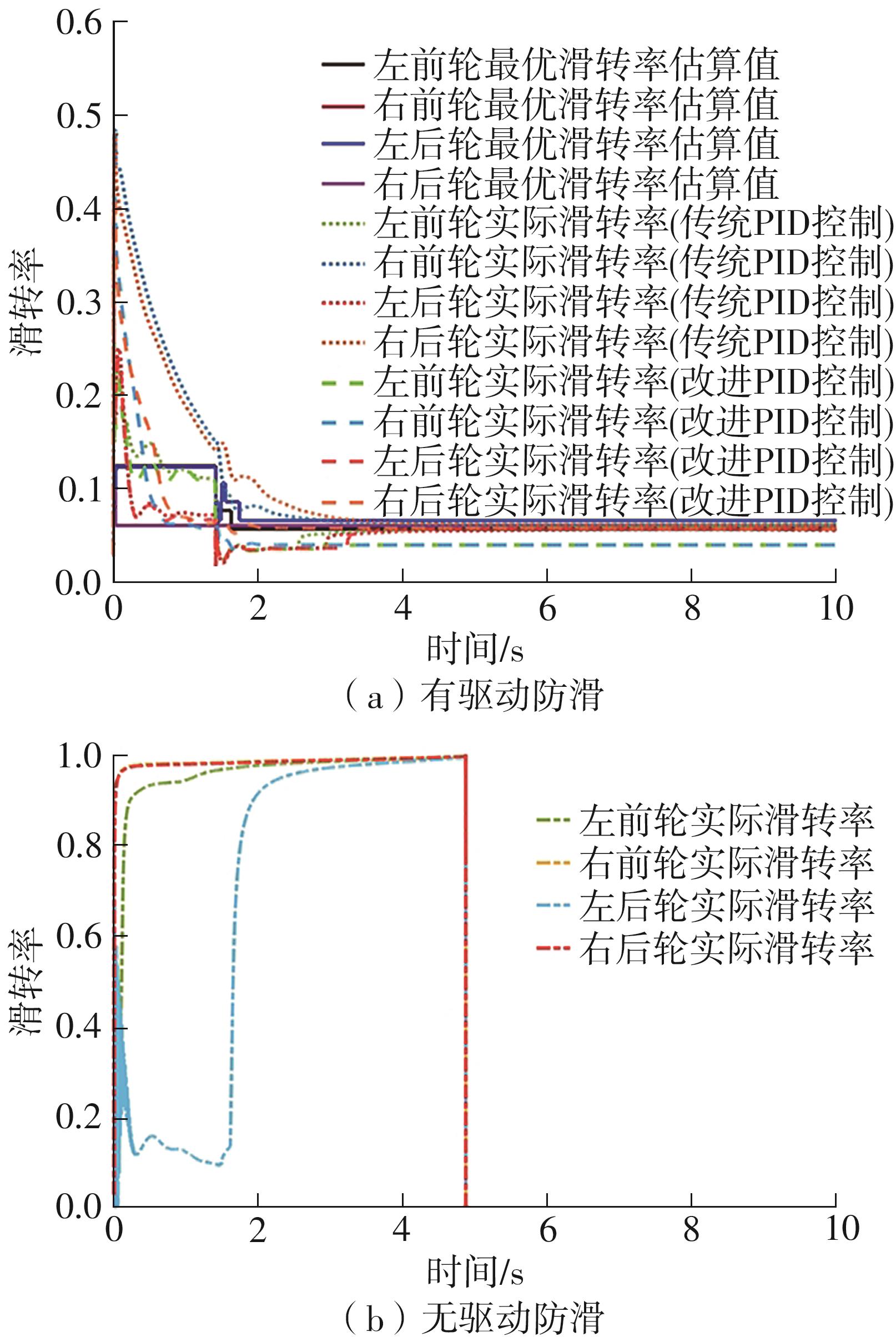
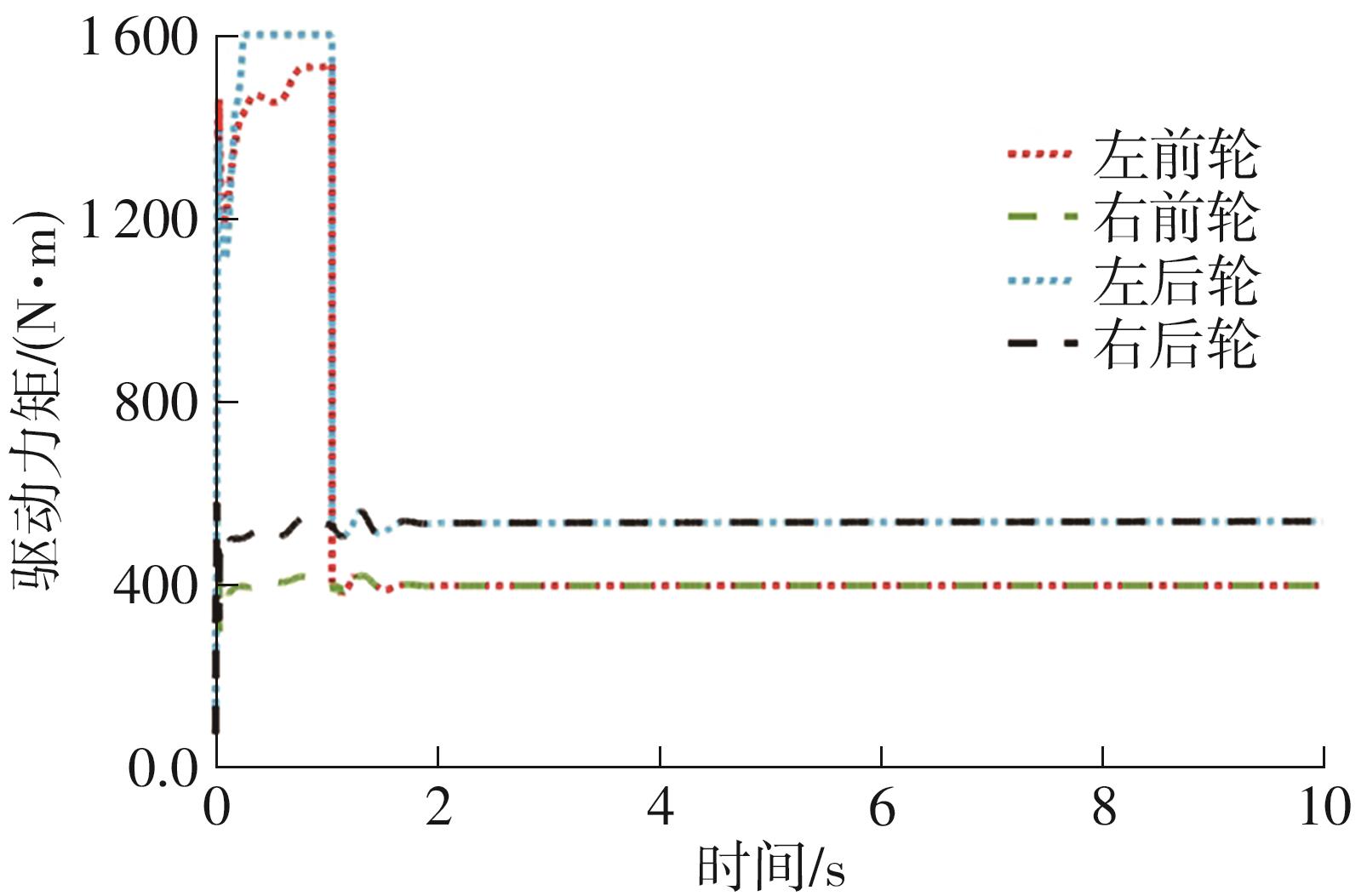
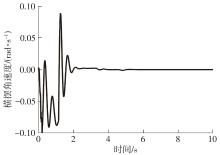
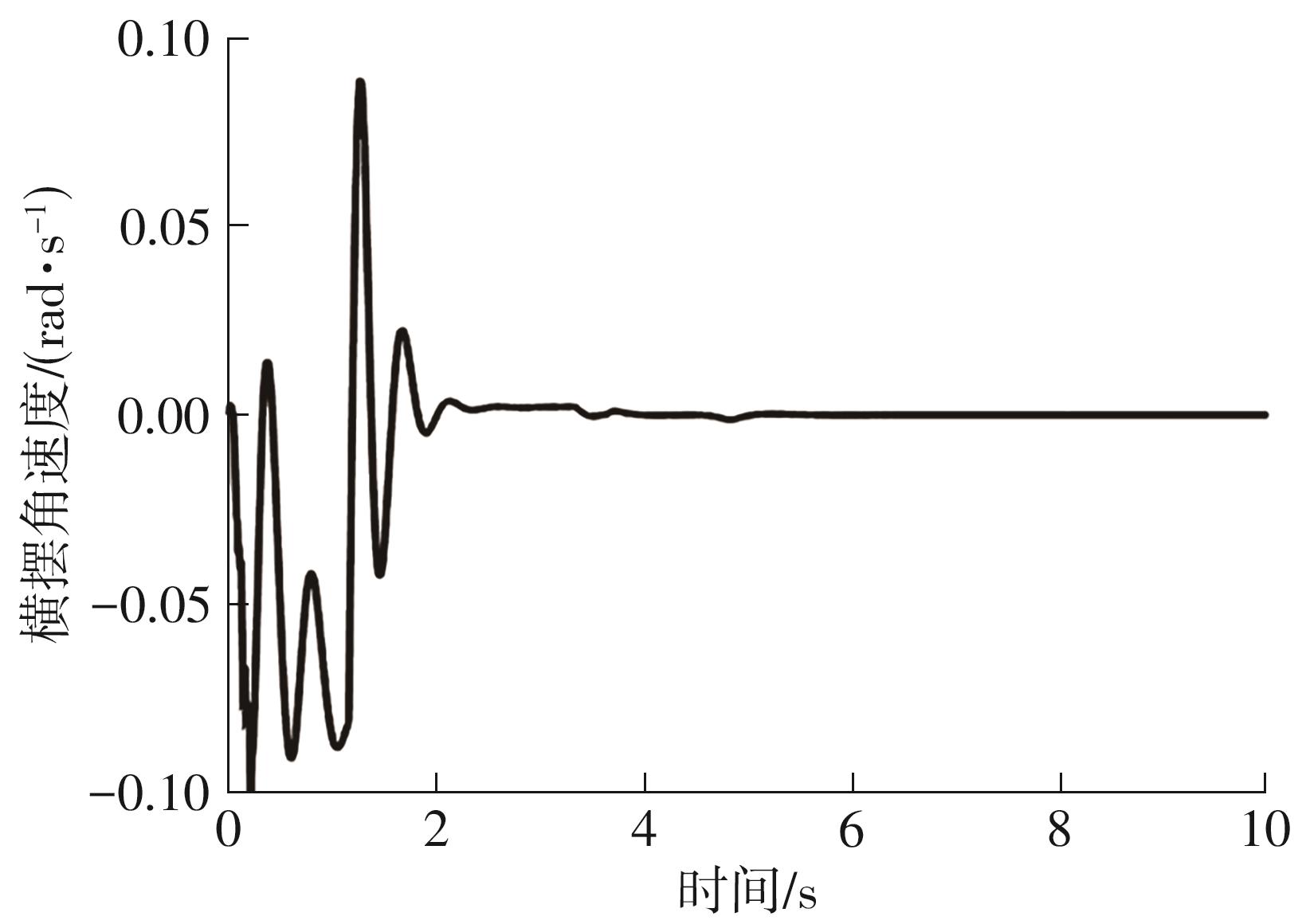
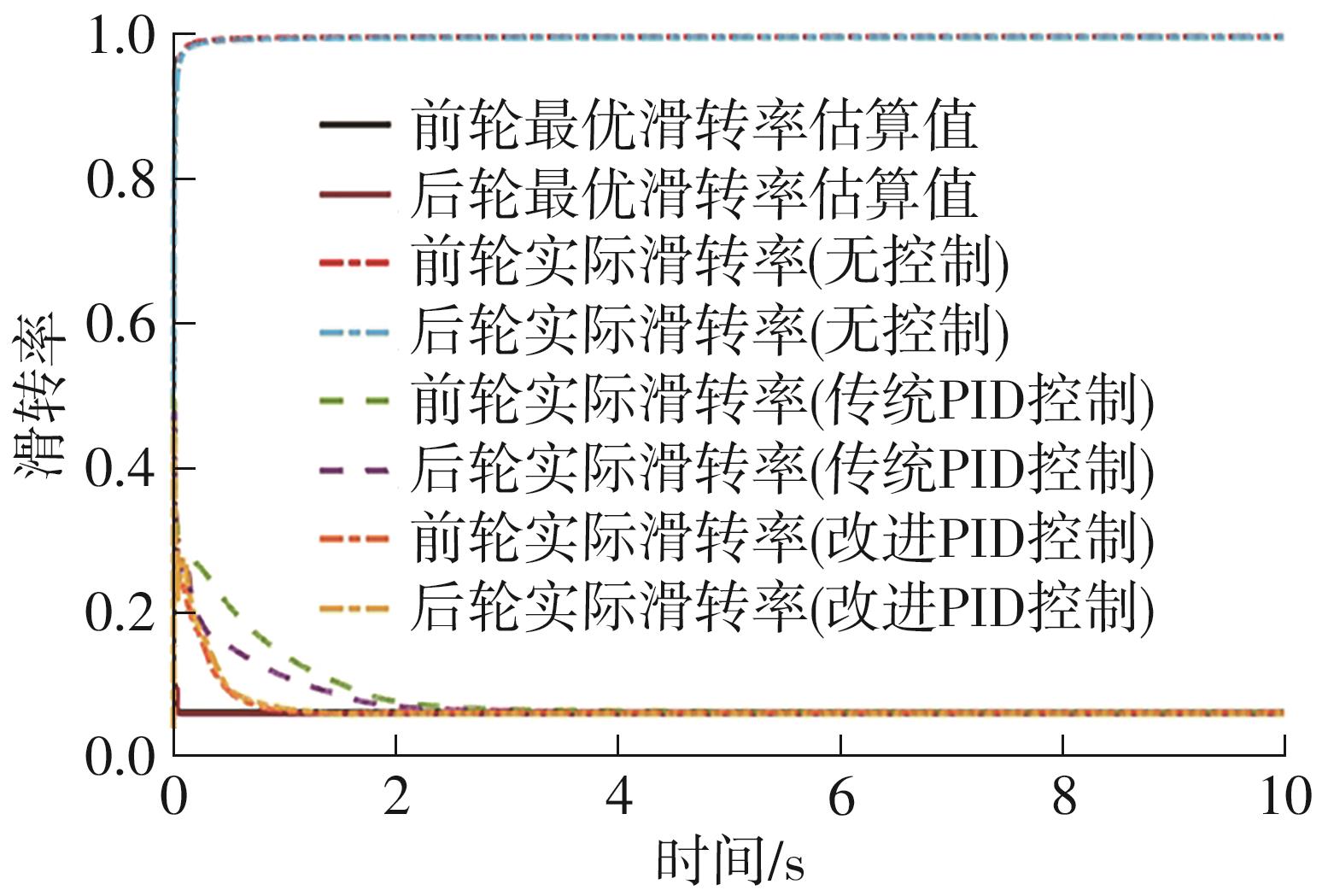
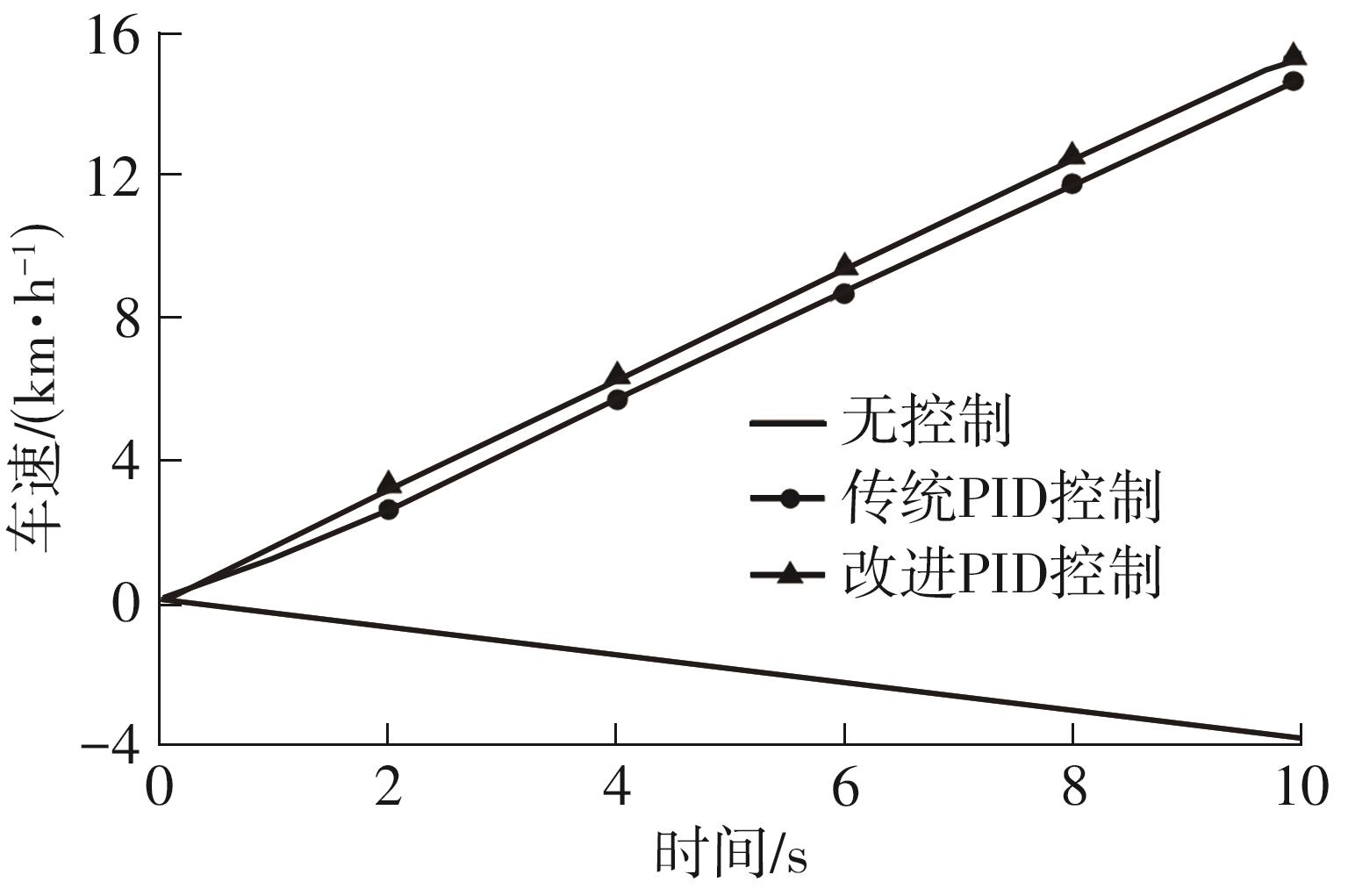
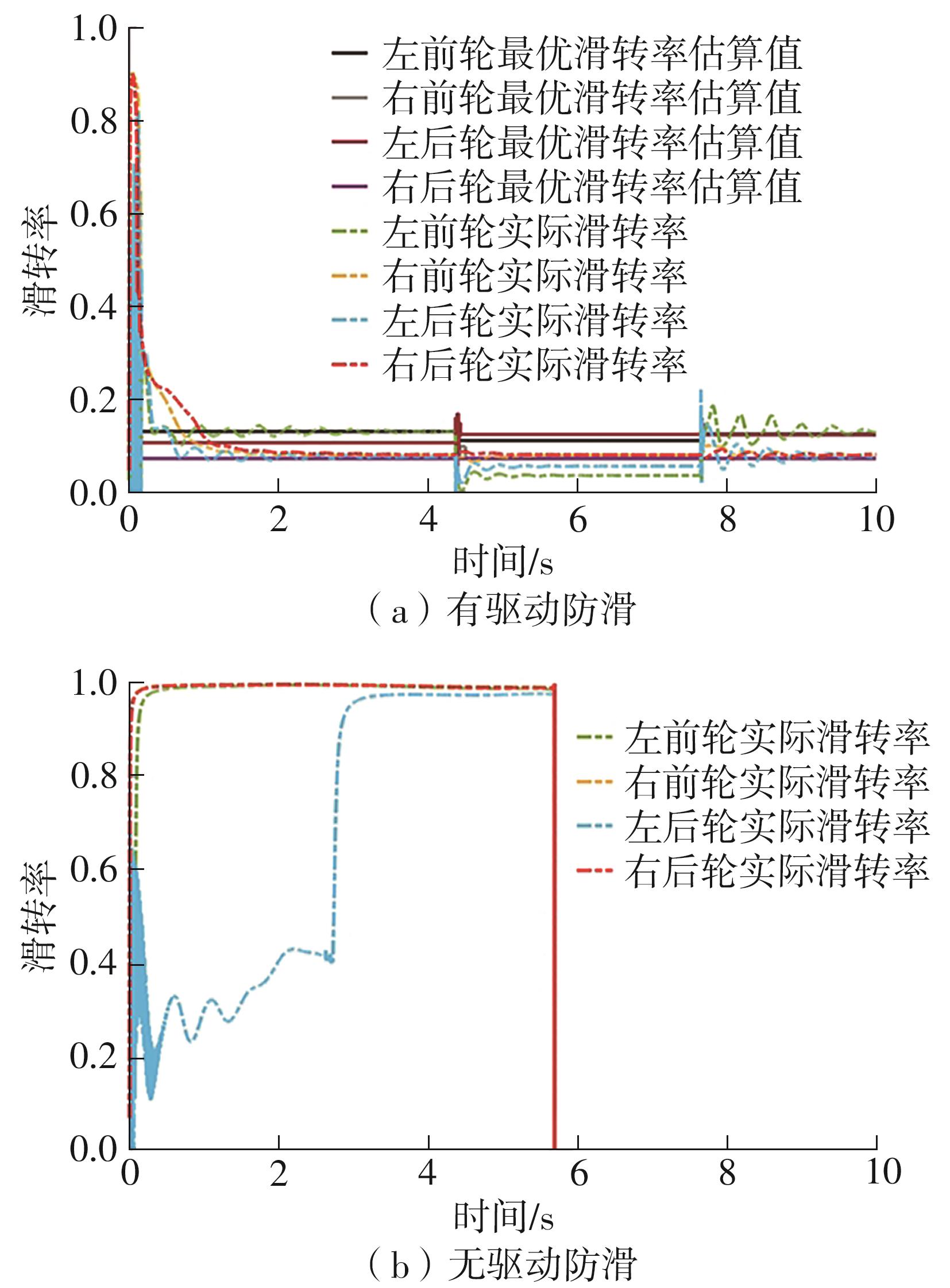
分布式驱动电动车辆可以独立、精准地控制各车轮的驱动转矩来实现驱动防滑控制,但单一的驱动防滑策略难以满足多种复杂行驶工况要求,不能保证车辆驱动综合性能最优。因此,该研究提出一种响应快速、控制精准适应多种复杂工况的驱动防滑多模式控制策略。首先,针对不同工况下的性能要求,基于七自由度分布式驱动车辆模型设计了相应的驱动模式及模式切换策略。其次,基于Burckhardt轮胎模型6条标准路面的附着特性曲线,利用优化的线性插值算法,提出了路面识别融合算法计算最优滑转率,并以此作为控制目标设计了非线性整定的PID控制器实现动力分配控制及切换。最后,建立了CarSim整车模型和Matlab/Simulink驱动防滑控制模型,在低附着路面、对接路面、对开路面、低附着坡道和对开坡道上进行了联合仿真验证。仿真结果表明,路面识别策略能精确地辨识道路的附着系数,驱动防滑策略在不同工况下都能快速响应,并在不同模式之间准确切换,兼顾了动力性与稳定性,有效提高了驱动防滑性能。
中图分类号: