华南理工大学学报(自然科学版) ›› 2025, Vol. 53 ›› Issue (10): 131-144.doi: 10.12141/j.issn.1000-565X.240228
人形机器人腿部构型研究的历史、现状与展望
丁宏钰1,2, 石照耀3, 张攀3, 付春江4
- 1.广东海洋大学 机械与能源工程学院,广东 阳江 529500
2.广东海洋大学深圳研究院,广东 深圳 518116
3.北京工业大学 北京市精密测控技术与仪器工程技术研究中心,北京 100124
4.深圳市优必选科技股份有限公司 人形机器人创新中心,广东 深圳 518052
-
收稿日期:2024-05-09出版日期:2025-10-25发布日期:2025-05-30 -
通信作者:石照耀(1964—),男,教授,博士生导师,主要从事精密测试技术和仪器、齿轮工程与精密减速器研究。 E-mail:hyding2004@163.com;shizhaoyao@bjut.edu.cn -
作者简介:丁宏钰(1979 —),男,高级工程师,硕士生导师,主要从事精密减速器、机器人关节、机器人构型研究。E-mail:hyding2004@163.com -
基金资助:国家自然科学基金项目(52375048);国家自然科学基金项目(52305046);广东海洋大学科研启动项目(1302-360302022301)
History, Present Situation and Prospect of Research on Leg Configuration of Humanoid Robot
DING Hongyu1,2, SHI Zhaoyao3, ZHANG Pan3, FU Chunjiang4
- 1.School of Mechanical and Energy Engineering,Guangdong Ocean University,Yangjiang 529500,Guangdong,China
2.Shenzhen Institute of Guangdong Ocean University,Shenzhen 518116,Guangdong,China
3.Beijing Engineering Research Center of Precision Measurement Technology and Instruments,Beijing University of Technology,Beijing 100124,China
4.Humanoid Innovation Center,UBTECH Robotics,Inc. ,Shenzhen 518052,Guangdong,China
-
Received:2024-05-09Online:2025-10-25Published:2025-05-30 -
Contact:石照耀(1964—),男,教授,博士生导师,主要从事精密测试技术和仪器、齿轮工程与精密减速器研究。 E-mail:hyding2004@163.com;shizhaoyao@bjut.edu.cn -
About author:丁宏钰(1979 —),男,高级工程师,硕士生导师,主要从事精密减速器、机器人关节、机器人构型研究。E-mail:hyding2004@163.com -
Supported by:the National Natural Science Foundation of China(52375048)
摘要:
人形机器人的运动性能还没有全面达到人类的水平,是影响其大规模产业化应用的因素之一,这不仅是由于控制算法的限制,也受到机械结构设计的制约,尤其是腿部构型在很大程度上决定了机器人的动态平衡性、负载能力和能源效率。为此,该文研究了国内外人形机器人腿部构型的起源与发展历程。目前,人形机器人的腿部构型主要分为串联、并联和串并联3种形式,其结构特性直接影响运动表现。该文分析了串联、并联和串并联构型,并比较其性能特点:串联构型工作空间大,灵活性高,但由于关节传动链较长,刚度相对较低,影响承载能力;并联构型刚度高,动态响应快,但运动范围受限;串并联构型则结合了前两者的优势,具有较好的刚度和灵活性,近年来逐渐成为研究热点之一。讨论了腿部构型研究的技术难点、热点,指出了发展趋势:腿部从采用单一串联构型向使用并联和串并联构型方向发展;腿部驱动器由刚性驱动器向弹性和准直驱驱动器方向发展;腿部采用旋转驱动器向旋转和直线驱动器并用方向发展;控制方面由位置控制向力矩控制和力位混合控制方向发展。
中图分类号:
引用本文
丁宏钰, 石照耀, 张攀, 付春江. 人形机器人腿部构型研究的历史、现状与展望[J]. 华南理工大学学报(自然科学版), 2025, 53(10): 131-144.
DING Hongyu, SHI Zhaoyao, ZHANG Pan, FU Chunjiang. History, Present Situation and Prospect of Research on Leg Configuration of Humanoid Robot[J]. Journal of South China University of Technology(Natural Science Edition), 2025, 53(10): 131-144.
图1
人类腿部关节简化"
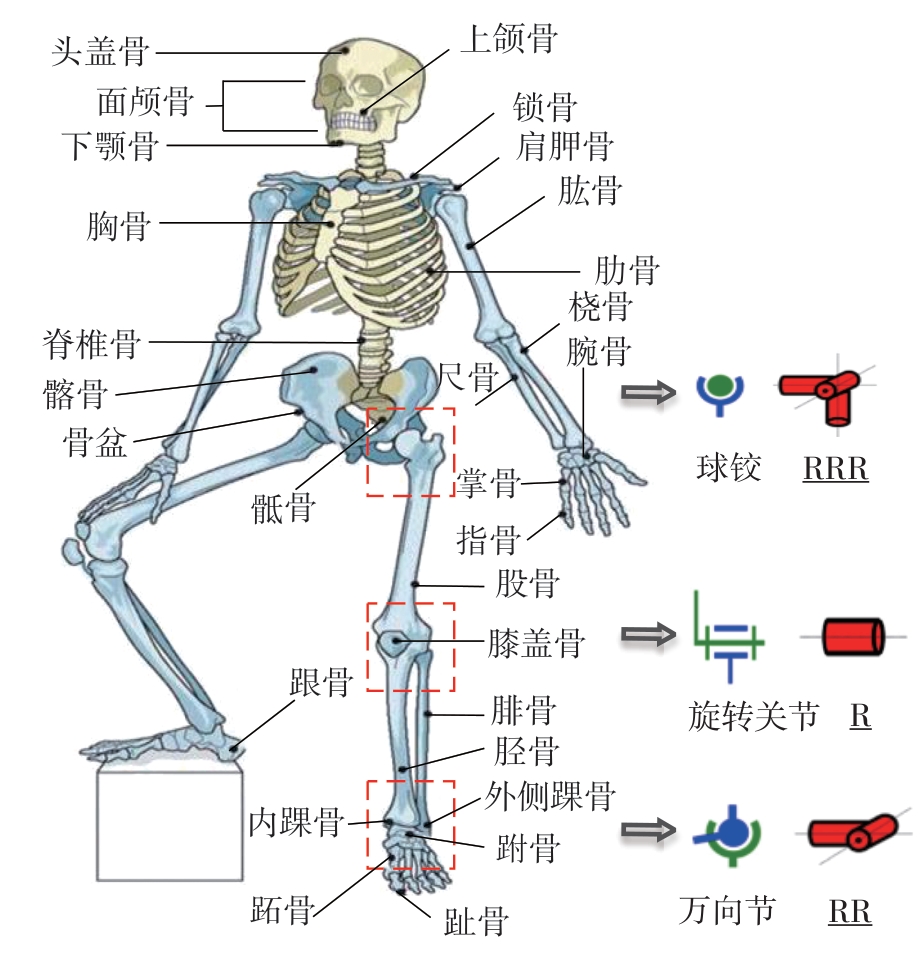
图2
Hill肌肉力模型"
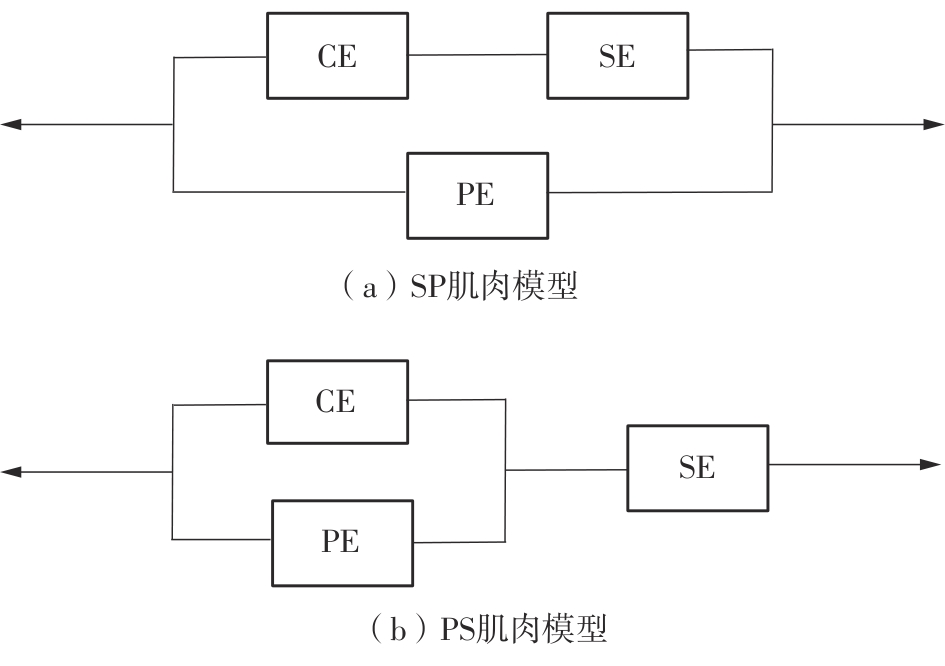

图3
人形机器人腿部构型历史"
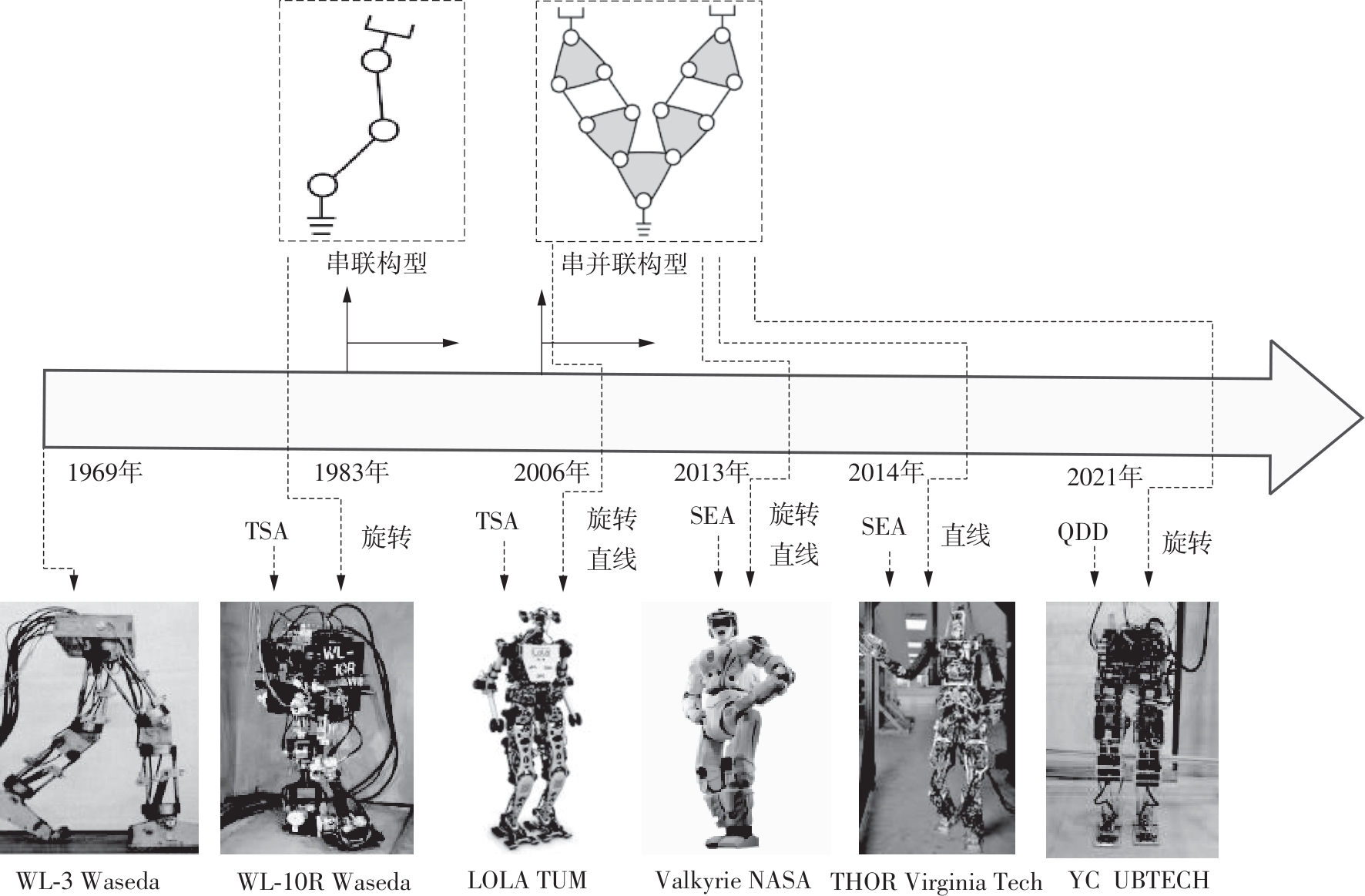
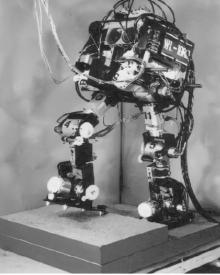
图4
WL-10RD机器人[12]"
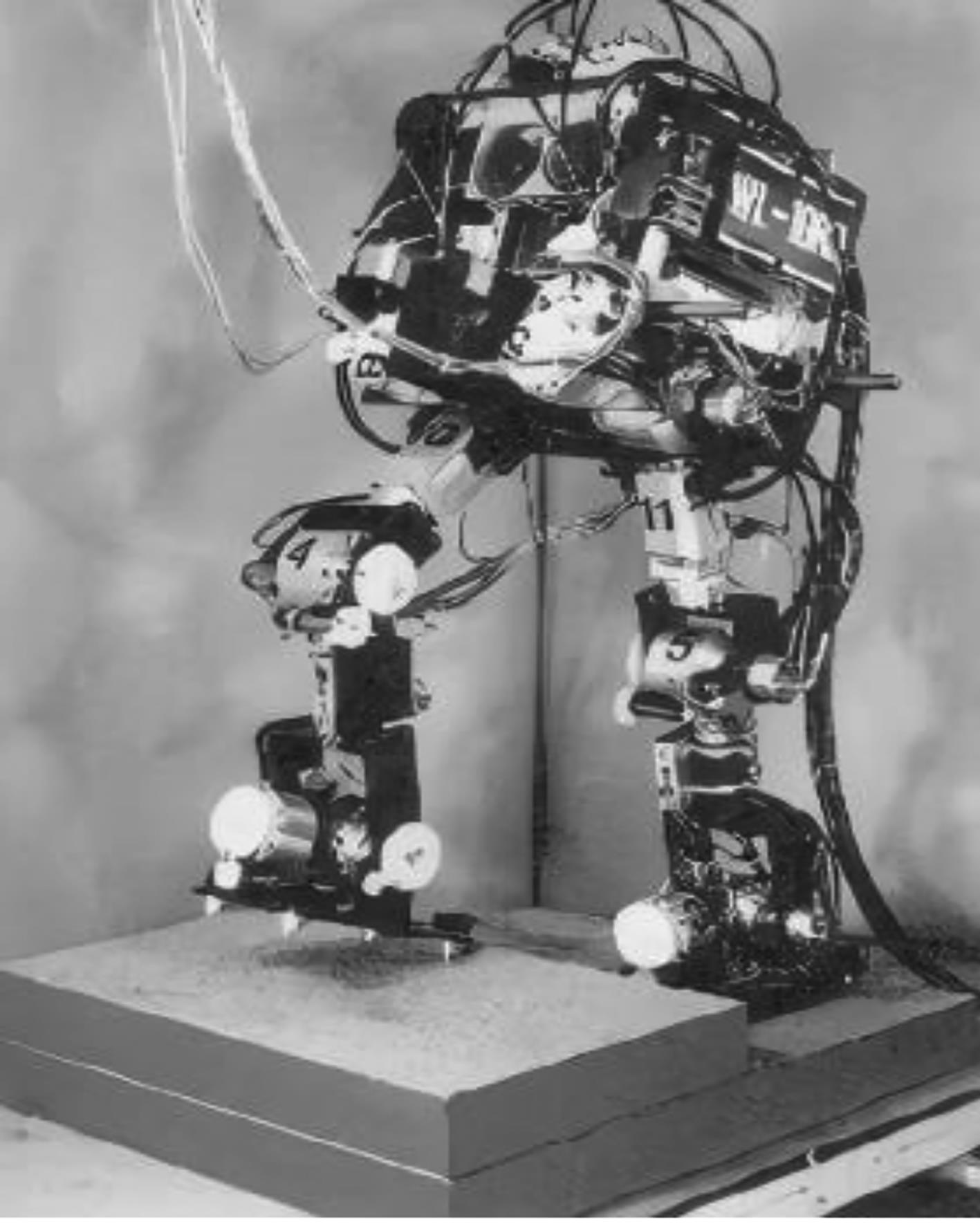

图5
HUBO机器人腿部结构[21]"
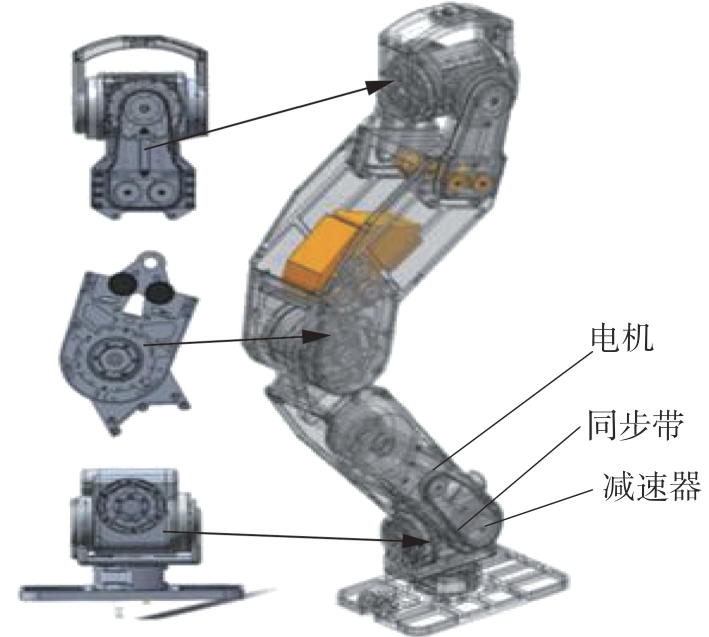
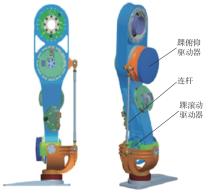
图6
TORO机器人腿部[22]"
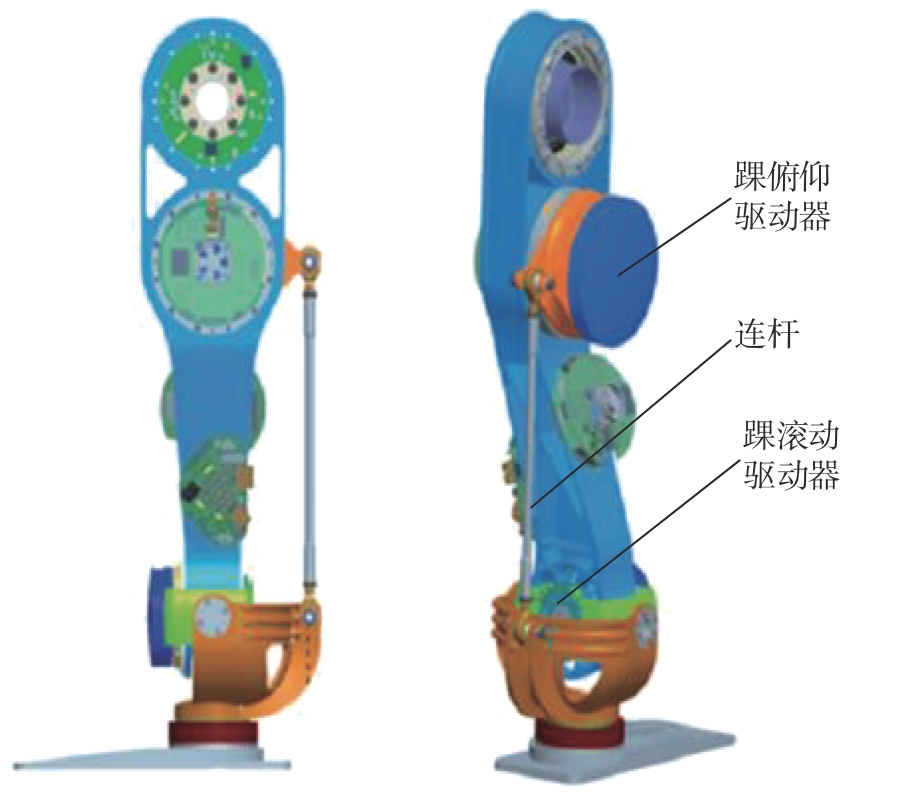
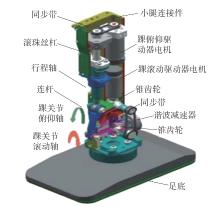
图7
HPR-4机器人小腿结构[26]"
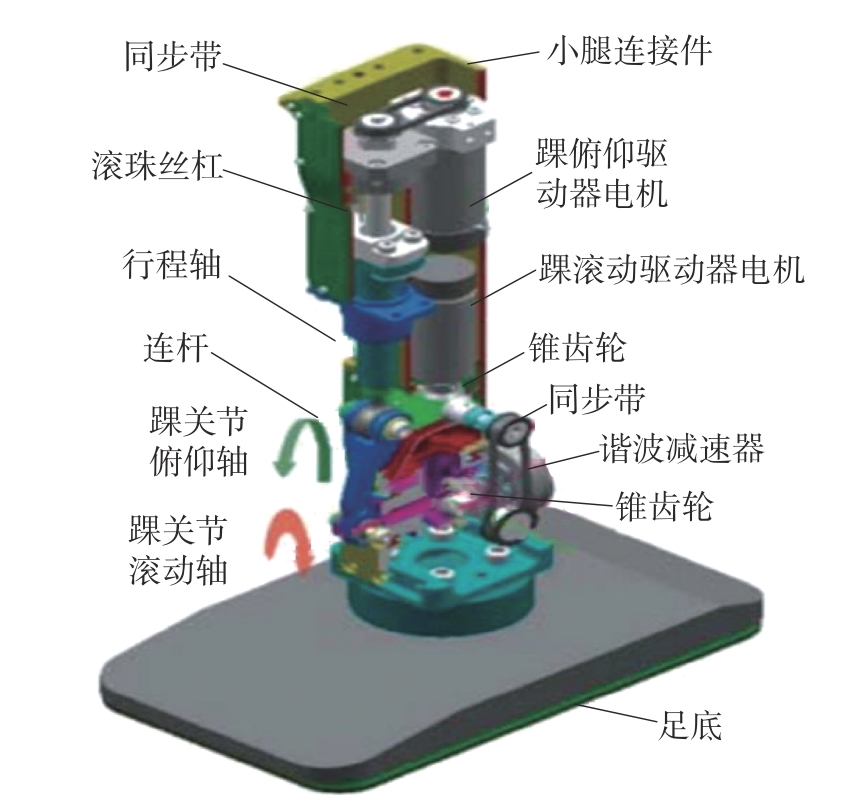

图8
COMAN机器人腿部结构[30]"
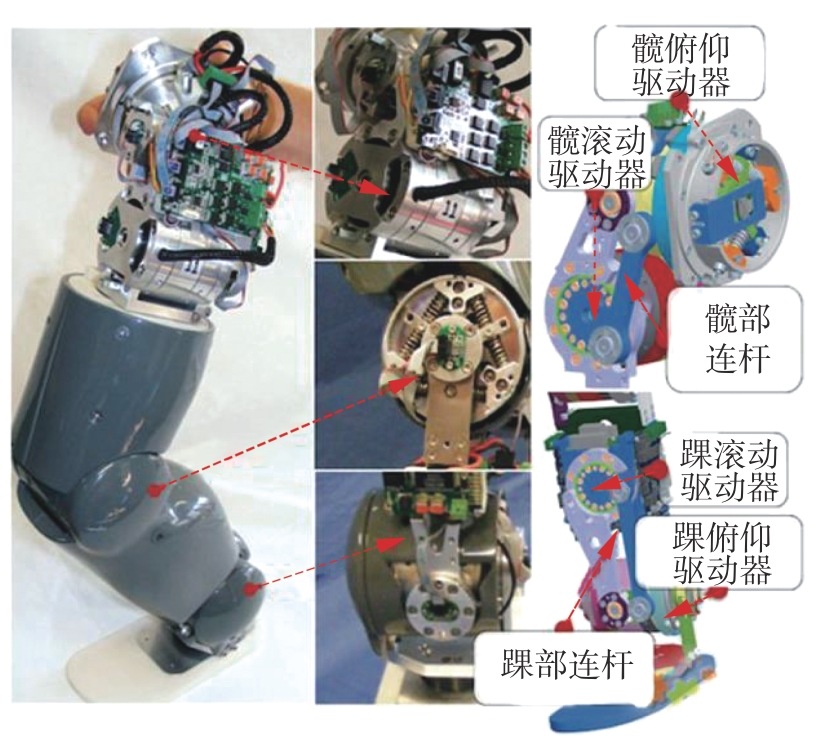

图9
Valkyrie机器人踝部机构[36]"

图10
CogIMon机器人踝部机构[37]"
图11
DURUS机器人踝部机构[38]"
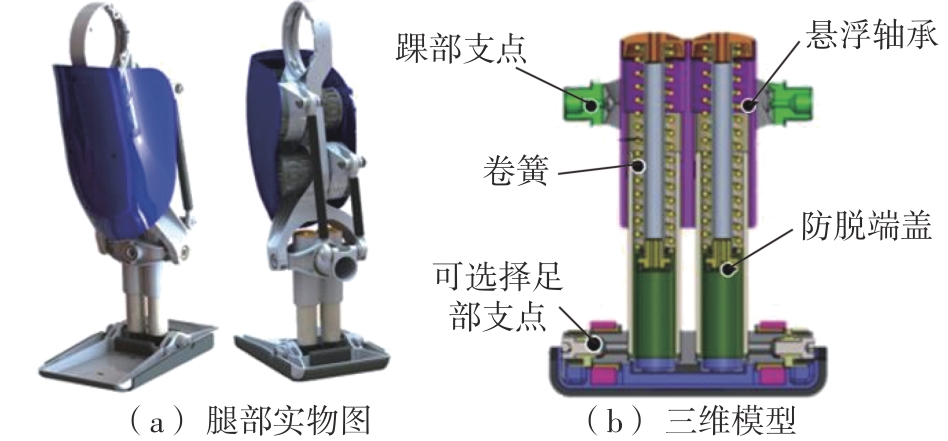
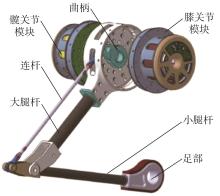
图12
跳跃机器人腿部构型[44]"
图13
WALK-MAN机器人腿部构型[46]"
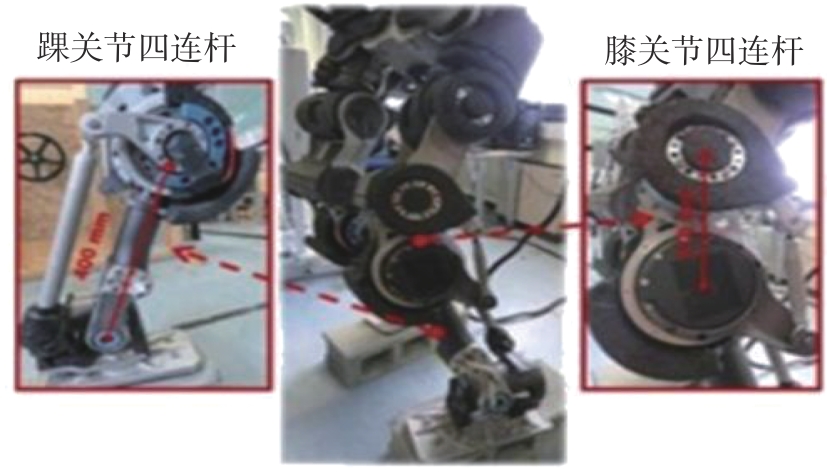
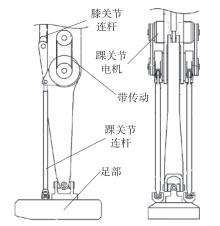
图14
ASIMO机器人腿部结构[48]"
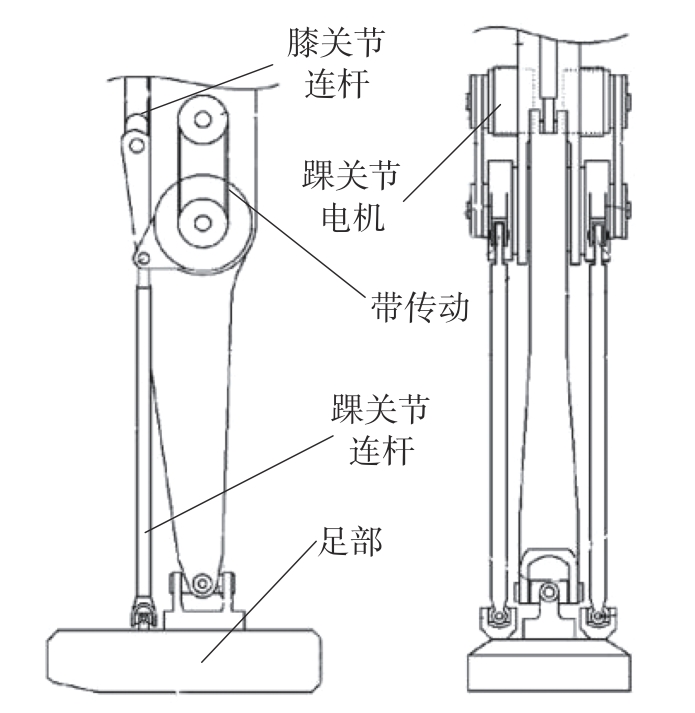
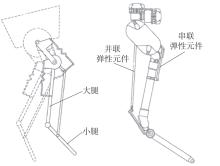
图15
Digit机器人腿部结构[50]"
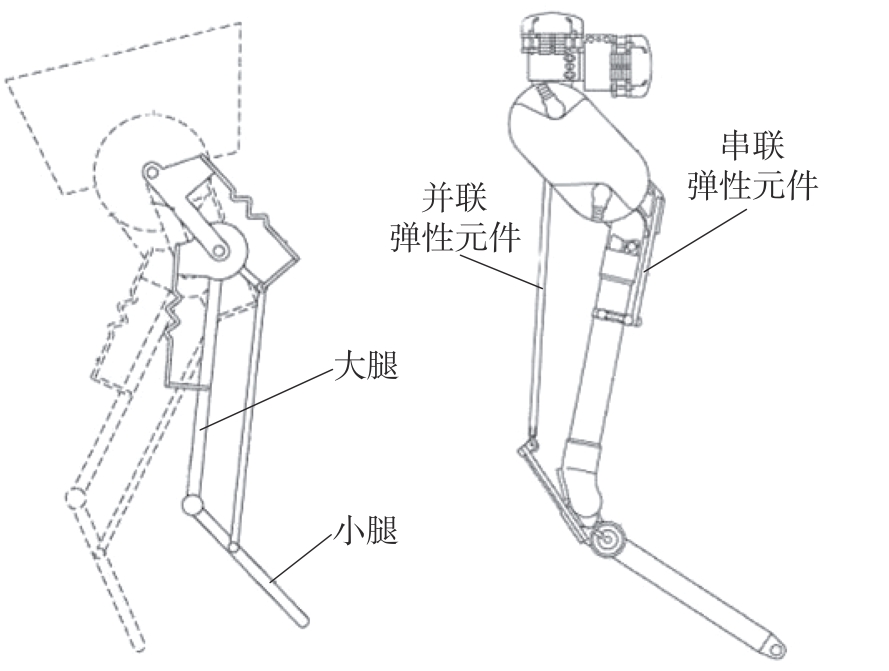
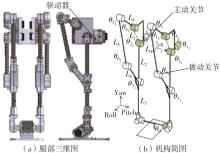
图16
Disney机器人腿部结构[52]"
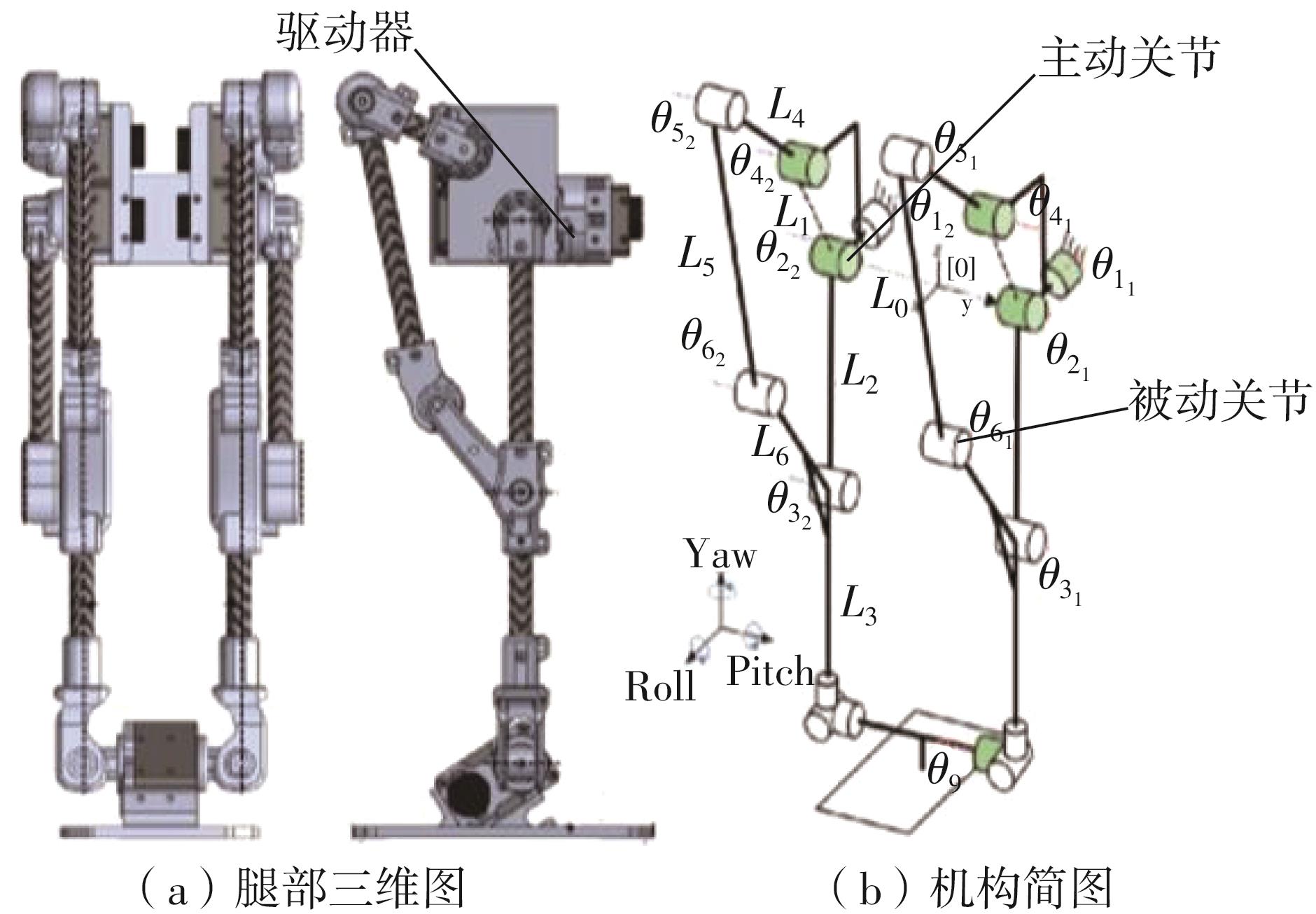

图17
LEO机器人腿部构型[53]"
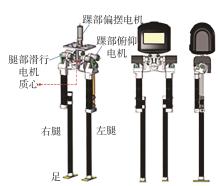
图18
L03 机器人腿部构型[54]"
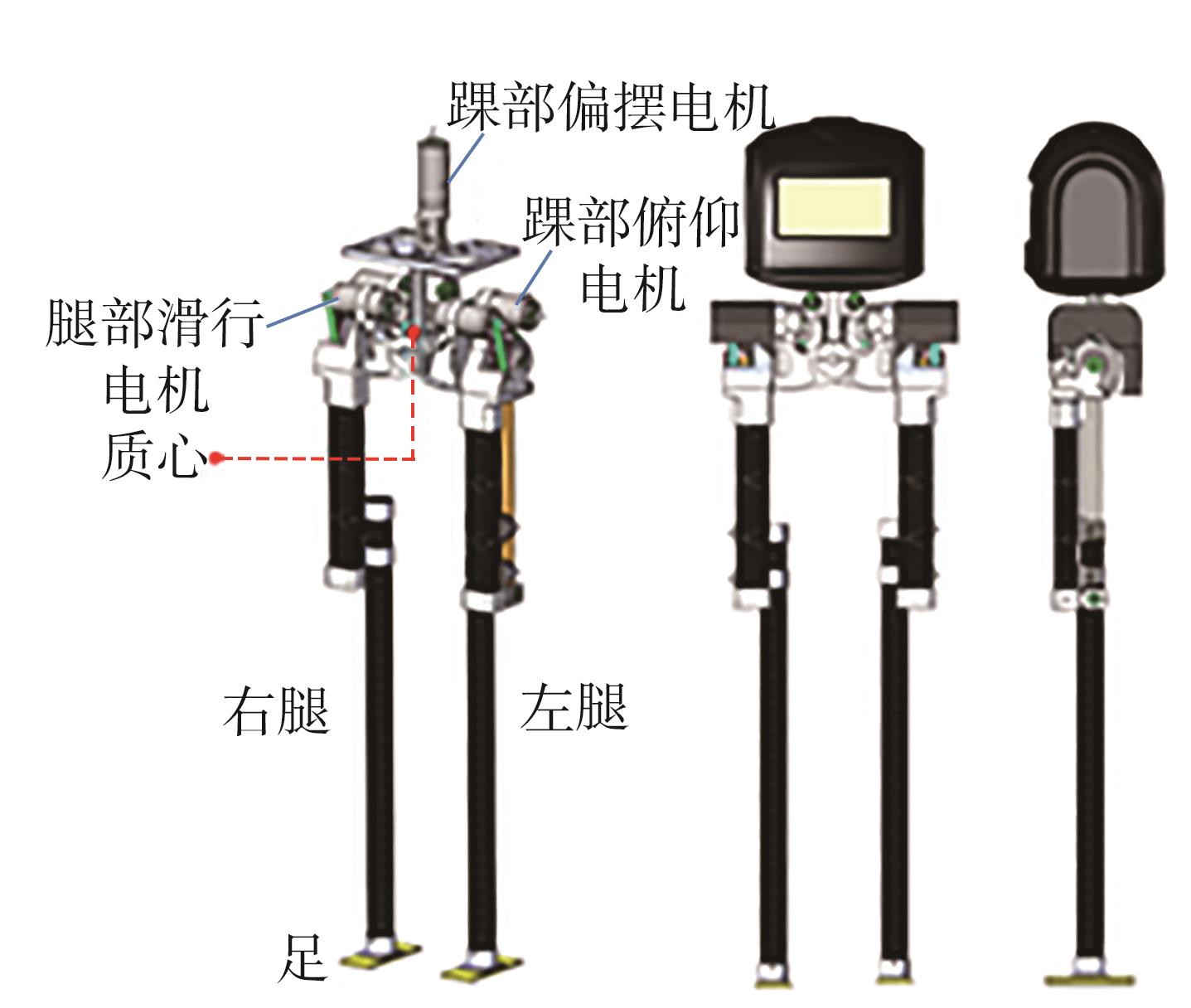
图19
OmniLeg机器人腿部结构[55]"
图20
麻省理工学院机器人结构[56]"
图21
YC 机器人腿部结构[58]"
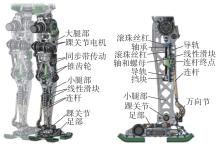
图22
LOLA机器人腿部构型[59]"
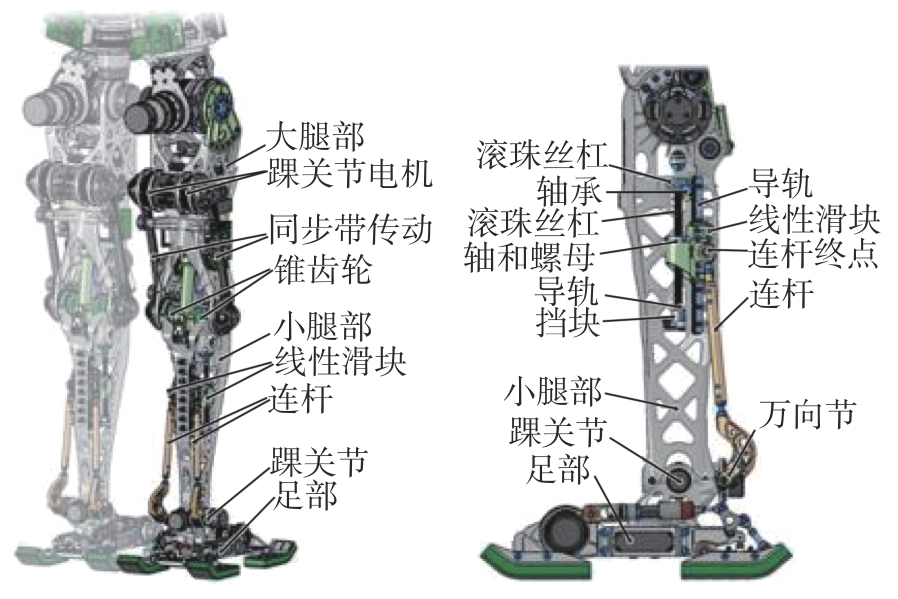
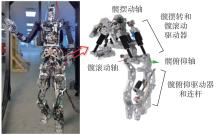
图23
THOR机器人腿部结构[10]"
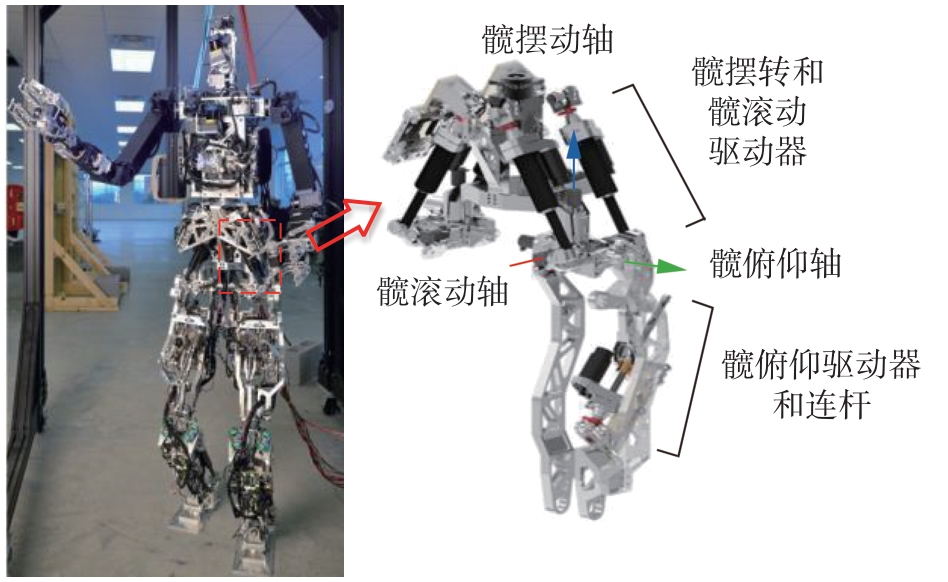
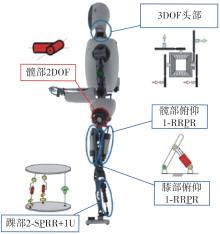
图24
RH5机器人腿部构型[62]"
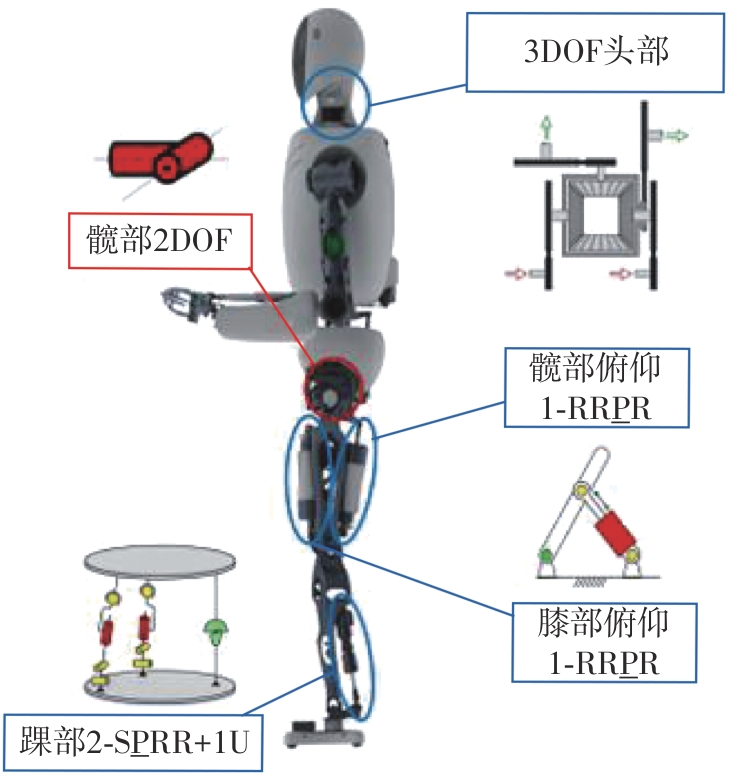
图25
BHR-T机器人腿部构型[63]"
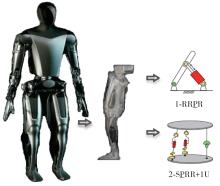
图26
Optimus 机器人腿部构型[64]"
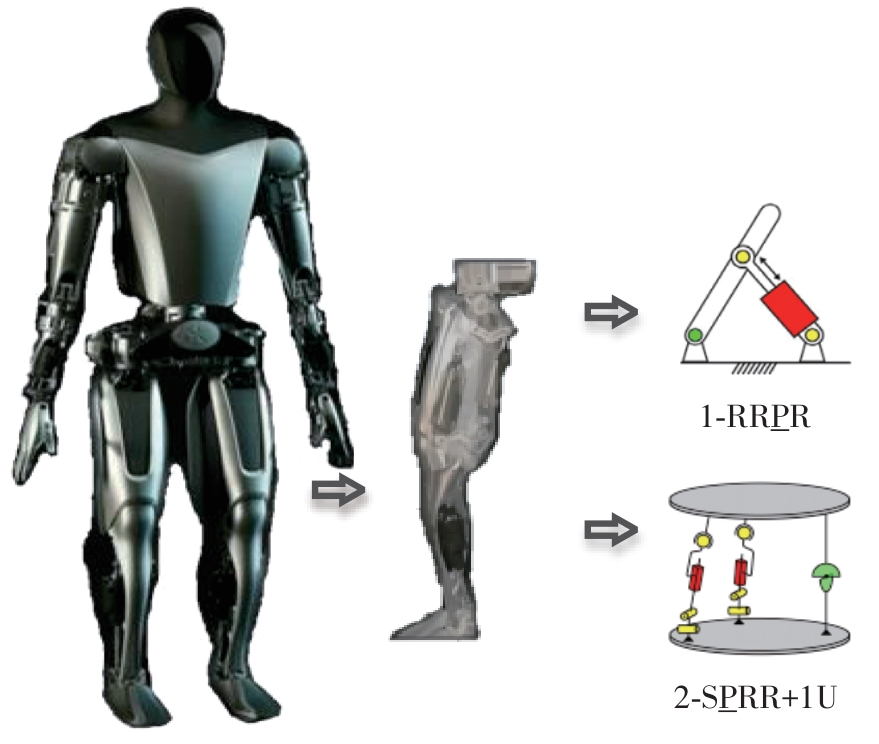
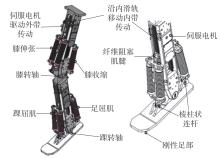
图27
JEG 机器人腿部构型[65]"
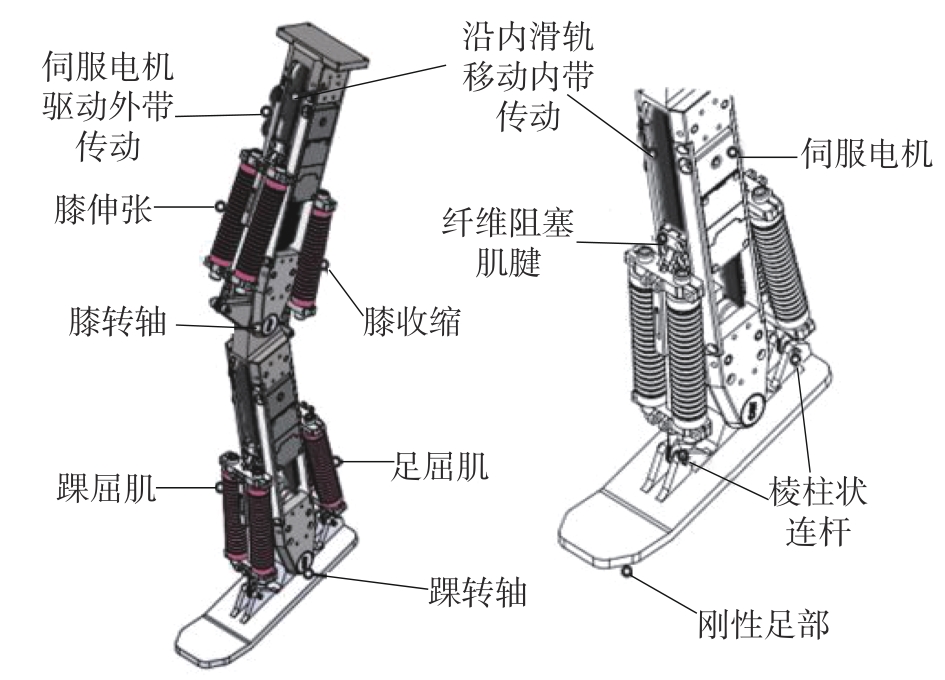
表1
腿部构型性能比较"
构型 类型 | 刚性 | 质量 分布 | 转动惯量 | 运动学 求解 |
|---|---|---|---|---|
| 串联 | 较差 | 质心低 | 膝部和髋部转动惯量大 | 简单 |
| 并联 | 好 | 质心高 | 髋部和膝部转动惯量小 | 复杂 |
| 串并联 | 好 | 质心高 | 髋部和膝部转动惯量小 | 复杂 |
表2
典型机器人腿部并联机构应用情况"
| 机器人名称(时间) | 腿部使用并联机构自由度数量 | 腿部应用并联机构自由度数量 | ||
|---|---|---|---|---|
| 髋部 | 膝部 | 踝部 | ||
| LOLA[ | 0 | 1 | 2 | 3 |
| Valkyrie[ | 0 | 0 | 2 | 2 |
| TORO[ | 0 | 0 | 2 | 2 |
| THOR[ | 3 | 1 | 2 | 6 |
| TALOS[ | 0 | 0 | 2 | 2 |
| RH5[ | 1 | 1 | 2 | 4 |
| Disney Robot[ | 3 | 1 | 1 | 6 |
| YC[ | 1 | 1 | 2 | 4 |
| MIT Humanoid[ | 1 | 1 | 2 | 4 |
| Optimus[ | 2 | 1 | 2 | 5 |
| BHR-T[ | 0 | 1 | 2 | 3 |
表3
人形机器人腿部机构"
| 部位名称 | 机构/代号 | |||
|---|---|---|---|---|
| 髋部 | 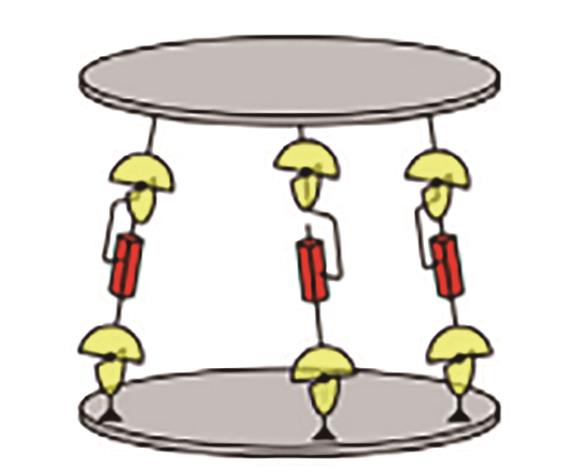 | 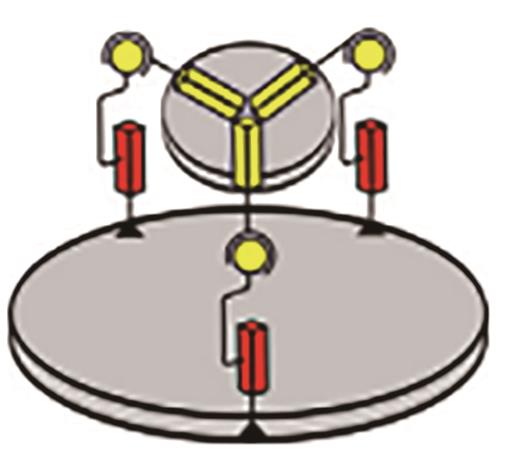 | 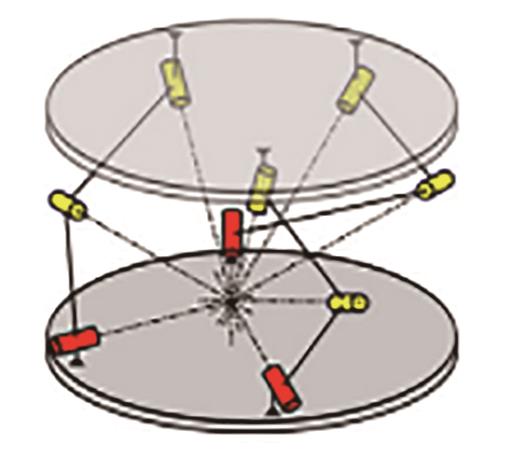 | 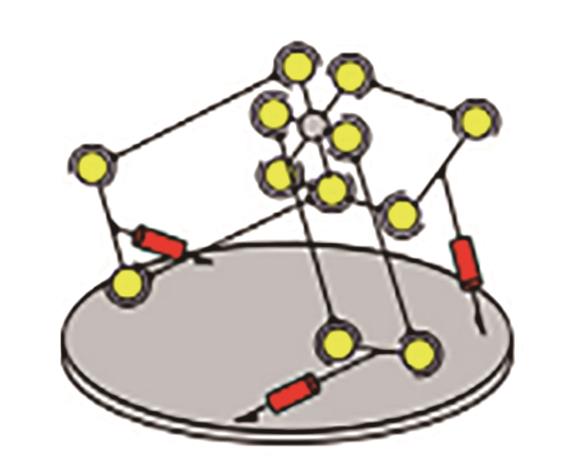 |
| 3-U | 3- | 3- | 3- | |
| 膝部 | 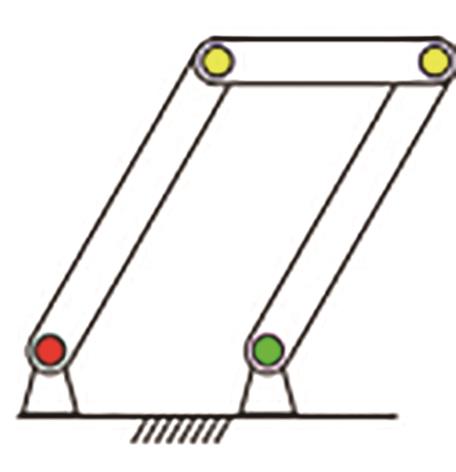 | 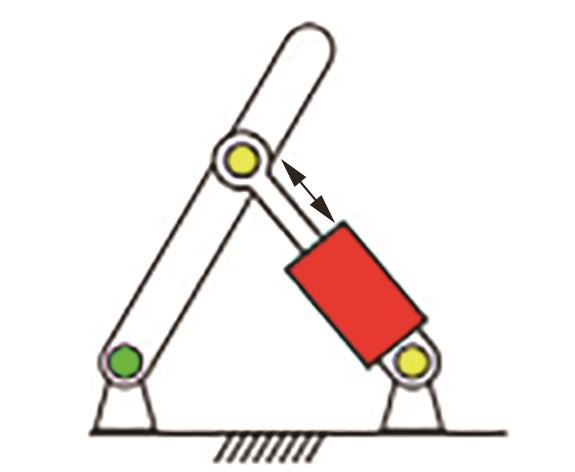 | ||
| 1- | 1-RR | |||
| 踝部 |  | 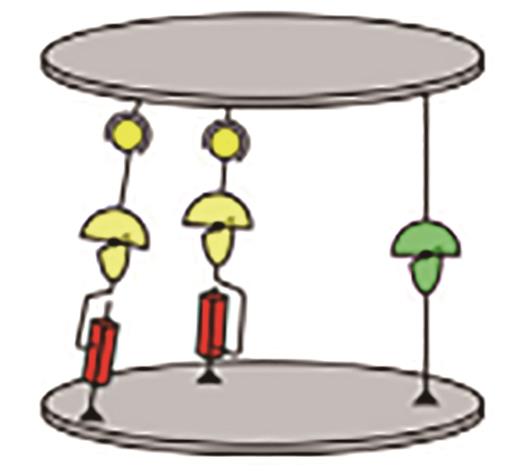 | 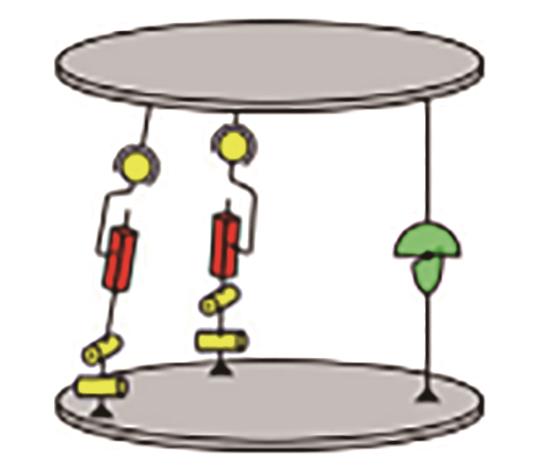 |  |
| 2-S | 2- | 2-S | 2-SU[1-RR | |
| [1] | 陈子琏,曾园山,张惠君 .人体结构学[M].北京:科学出版社,2001. |
| [2] | 刘方 .人体解剖学[M].3版.北京:人民卫生出版社,1998. |
| [3] | 周玉林,高峰 .仿人机器人构型[J].机械工程学报,2006,42(11):66-74. |
| ZHOU Yulin, GAO Feng .Configuration of humanoid robot[J].Chinese Journal of Mechanical Engineering,2006,42(11):66-74. | |
| [4] | KUMAR S, WÖHRLE H, FERNÁNDEZ J G,et al .A survey on modularity and distributivity in series-parallel hybrid robots[J].Mechatronics,2020,68:102367/1-17. |
| [5] | 郭志攀 .小型双足机器人设计及运动规划研究[D].哈尔滨:哈尔滨工业大学,2007. |
| [6] | HILL A V .The heat of shortening and the dynamic constants of muscle[J].Proceedings of the Royal Society B:Biological Sciences,1938,126(843):136-195. |
| [7] | 丁宏钰,石照耀,岳会军,等 .国内外双足人形机器人驱动器研究综述[J].哈尔滨工程大学学报,2021,42(7):936-945. |
| DING Hongyu, SHI Zhaoyao, YUE Huijun,et al .A review on biped humanoid robot actuator in China and overseas[J].Journal of Harbin Engineering University,2021,42(7):936-945. | |
| [8] | LIM H O, TAKANISHI A .Biped walking robots created at Waseda University:WL and WABIAN family[J].Philosophical Transactions Mathematical Physical & Engineering Sciences,2007,365(1850):49-64. |
| [9] | LOHMEIER S .Design and realization of a humanoid robot for fast and autonomous bipedal locomotion[D].Munich:Technical University of Munich,2010. |
| [10] | LEE B, KNABE C, OREKHOV V,et al .Design of a human-like range of motion hip joint for humanoid robots[C]∥ Proceedings of ASME 2014 International Design Engineering Technical Conferences and Compu-ters and Information in Engineering Conference.New York,ASME Press,2014:1-8. |
| [11] | 丁宏钰,汪文广,黄亮,等 .关节铰接结构、机器人腿部结构及机器人:CN215789962U[P].2022-02-11. |
| [12] | TAKANISHI,A,ISHIDA,M,YAMAZAKI,Y,et al .The realization of dynamic walking by the biped walking robot WL-10RD[J].Journal of the Robotics Society of Japan,1985,3(4):325-336. |
| [13] | LI Q H, TAKANISHI A, KATO I .Learning control of compensative trunk motion for biped walking robot based on ZMP stability criterion[C]∥ Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway:IEEE Press,1992:597-599. |
| [14] | ISHIDA T, KUROKI Y, YAMAGUCHI J .Mechanical system of a small biped entertainment robot[C]∥ Proceedings of Intelligent Robots and Systems.Piscata-way:IEEE Press,2003:297-302. |
| [15] | IRIBE M, FUKUSHIMA T, YAMAGUCHI J,et al .Development of a new actuator for a small biped entertainment robot which has suitable functions for humanoid robots[C]∥ Proceedings of Conference of the IEEE Industrial Electronics Society.Piscataway:IEEE Press,2004:2762-2767. |
| [16] | ISHIDA T, TAKANISHI A .A robot actuator deve-lopment weith high backdrivability[C]∥ Proceedings of Conference on Robotics,Automation and Mechatro-nics.Piscataway:IEEE Press,2006:1-6. |
| [17] | KUROKI Y .A small biped entertainment robot creating attractive applications[C]∥ Proceedings of International Conference on Robotics and Automation.Piscataway:IEEE Press,2006:13-20. |
| [18] | IRIBE M, FUKUSHIMA T, YAMAGUCHI J,et al .Development of a new actuator for a small biped entertainment robot which has suitable functions for humanoid robots[C]∥ Proceedings of the 30th annual Confe-rence of the IEEE Industrial Electronics Society.Piscata-way:IEEE Press,2005:2762-2767. |
| [19] | PARK I, KIM J,OH J,et al .Online biped walking pattern generation for humanoid robot KHR-3(KAIST Humanoid Robot-3:HUBO)[C]∥ Proceedings of the 2006 6th IEEE-RAS International Conference on Humanoid Robots.Piscataway:IEEE Press,2006:398- 403. |
| [20] | PARK I W, KIM J Y, LEE J,et al .Mechanical design of the humanoid robot platform,HUBO[J].Advanced Robotics,2007,21(11):1305-1322. |
| [21] | JUNG T,LIM J,BAE H,et al .Development of the humanoid disaster response platform DRC-HUBO+[J].IEEE Transactions on Robotics,2018,34(1):1-17. |
| [22] | OTT C, BAUMGARTNER C, MAYR J,et al .Deve-lopment of a biped robot with torque controlled joints[C]∥ Proceedings of International Conference on Humanoid Robots.Los Alamitos:IEEE Computer Society Press,2010:167-173. |
| [23] | ENGLSBERGER J, WERNER A,OTT C,et al .Overview of the torque-controlled humanoid robot TORO[C]∥ Proceedings of International Conference on Humanoid Robots.Los Alamitos:IEEE Computer Society Press,2014:916-923. |
| [24] | HENZE B, ROA M A,OTT C .Passivity-based whole-body balancing for torque-controlled humanoid robots in multi-contact scenarios[J].The International Journal of Robotics Research,2014,35(12):1522-1543. |
| [25] | HENZE B, DIETRICH A, ROA M A,et al .Multi-contact balancing of humanoid robots in confined spaces:utilizing knee contacts[C]∥ Proceedings of IEEE/RSJ International Conference on Intelligent Robots and Systems. Vancouver:IEEE Press,2017:697-704. |
| [26] | KANEKO K, KANEHIRO F, MORISAWA M,et al .Humanoid robot HRP-4-humanoid robotics platform with lightweight and slim body[C]∥ Proceedings of 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems.San Francisco:IEEE Press,2011:4400-4407. |
| [27] | COLASANTO L, TSAGARAKIS N G, CALDWELL D G .A compact model for the compliant humanoid robot COMAN[C]∥ Proceedings of the Fourth IEEE RAS/EMBS International Conference on Biomedical Robotics & Biomechatronics.Roma:IEEE Computer Society Press,2012:688-694. |
| [28] | DALLALI H, KORMUSHEV P, LI Z,et al .On global optimization of walking gaits for the compliant humanoid robot COMAN using reinforcement learning[J].Cybernetics and Information Technologies,2012,12(3):39-52. |
| [29] | LI Z, VANDERBORGHT B, TSAGARAKIS N G,et al.Stabilization for the compliant humanoid robot COMAN exploiting intrinsic and controlled compliance[C]∥ Proceedings of 2012 IEEE International Conference on Robotics and Automation.Saint Paul:IEEE Press,2012:2000-2006. |
| [30] | VO-GIA L, KASHIRI N, NEGRELLO F,et al .Development of a 7DOF soft manipulator arm for the compliant humanoid robot COMAN[C]∥ Proceedings of 2014 IEEE International Conference on Robotics and Biomimetics.Bali:IEEE Press,2014:1106-1111. |
| [31] | SHAREEF Z, STEIL J .Trajectory optimization of compliant humanoid (COMAN) robot arm using path parameter based dynamic programming[C]∥ Proceedings of International Conference on Humanoid Robots.Cancun:IEEE Press,2017:705-710. |
| [32] | LEE J, DALLALI H, TSAGARAKIS N,et al .Robust and model-free link position tracking control for humanoid COMAN with multiple compliant joints[C]∥ Proceedings of 13th IEEE-RAS International Conference on Humanoid Robots.Atlanta:IEEE Press,2013:1-7. |
| [33] | ZHENG Y, LIN M C, MANOCHA D,et al .A walking pattern generator for biped robots on uneven terrains[C]∥ Proceedings of 2010 IEEE/RSJ International Conference on Intelligent Robots & Systems.Taipei:IEEE Press,2010:4483-4488. |
| [34] | 梶田秀司 .仿人机器人[M].北京:清华大学出版社,2007. |
| [35] | DING H Y, SHI Z, HU Y,et al .Lightweight design optimization for legs of bipedal humanoid robot[J].Structural and Multidisciplinary Optimization,2021,64:2749-2762. |
| [36] | RADFORD N A, STRAWSER P, HAMBUCHEN K,et al .Valkyrie:NASA’s first bipedal humanoid robot[J].Journal of Field Robotics,2015,32(3):379-419. |
| [37] | ZHOU C, NIKOS T .On the comprehensive kinema-tics analysis of a humanoid parallel ankle mechanism[J].Journal of Mechanisms and Robotics,2018,10(5):1-15. |
| [38] | REHER J, COUSINEAU E A, HEREID A,et al .Realizing dynamic and efficient bipedal locomotion on the humanoid robot DURUS[C]∥ Proceedings of 2016 IEEE International Conference on Robotics and Automation (ICRA). Stockholm: IEEE,2016:1794-1801. |
| [39] | 俞志伟,王立权 .双足机器人并联踝关节优化设计[J].机械工程学报,2009,45(11):52-57. |
| YU Zhiwei, WANG Liquan .Optimal design for biped robot parallel ankle joint for[J].Journal of Mechanical Engineering,2009,45(11):52-57. | |
| [40] | STASSE O, FLAYOLS T, BUDHIRAJA R,et al .TALOS:a new humanoid research platform targeted for industrial applications[C]∥ Proceedings of 2017 IEEE-RAS 17th International Conference on Humanoid Robotics (Humanoids).Birmingham:IEEE Press,2017:689-695. |
| [41] | RAMUZAT N, BUONDONNO G, BORIA S,et al .Comparison of position and torque whole body control schemes on the humanoid robot TALOS[C]∥ Proceedings of International Conference on Advanced Robotics.Ljubljana:IEEE Press,2021:785-792. |
| [42] | BONNET V, MIRABEL J, DANEY D,et al .Practical whole-body elasto-geometric calibration of a humanoid robot:application to the TALOS robot[J].Robo-tics and Autonomous Systems,2023,164:104365/1-12. |
| [43] | 陈子明,尹涛,潘泓,等 .一种三自由度并联踝关节康复机构[J].机械工程学报,2020,56(21):70-77. |
| CHEN Ziming, YIN Tao, PAN Hong,et al .3-DOF parallel ankle joint rehabilitation mechanism[J].Journal of Mechanical Engineering,2020,56(21):70-77. | |
| [44] | 单开正,于海涛,韩亮亮,等 .近似直驱双足机器人跳跃运动非线性优化及试验验证[J].机械工程学报,2021,57(13):153-162,171. |
| SHAN Kaizheng, YU Haitao, HAN Liangliang,et al .Nonlinear optimization and experimental validation of a quasi-direct-drive bipedel robot’s jumping motion[J].Journal of Mechanical Engineering,2021,57(13):153-162,171. | |
| [45] | NEGRELLO F, GARABINI M, GATELANO M G .et al.A modular compliant actuator for emerging high performance and fall-resilient humanoids[C]∥ Proceedings of 2015 IEEE-RAS 15th International Conference on Humanoid Robots (Humanoids).Seoul:IEEE Press,2015:414-420. |
| [46] | NEGRELLO F, GARABINI M, CATALANO M G,et al .WALK-MAN humanoid lower body design optimization for enhanced physical performance[C]∥ Proceedings of 2016 IEEE International Conference on Robotics & Automation. Stockholm:IEEE Press,2016:1817-1824. |
| [47] | TSAGARAKIS G N, CALDWELL D G, NEGRELLO F,et al .WALK-MAN:a high-performance humanoid platform for realistic environments[J].Journal of Field Robotics,2017,43(4):1-35. |
| [48] | ISHIKAWA T, MIYAZAKI S, YAMAMOTO T .Legged mobile robot and swing structure:Japan,JP2011224772A[P].2011-11-10. |
| [49] | ISHIKAWA T, MIYAZAKI S, YAMAMOTO T .Legged mobile robot and swing structure:Japan,JP5602057B2[P].2014-08-29. |
| [50] | HURST J, JONES M S . ABATE A M .Leg configuration for spring-mass legged locomotion:US10189519B2[P].2019-01-29. |
| [51] | GIM K G, KIM J, YAMANE K .Design of a serial-parallel hybrid leg for a humanoid robot[C]∥ Proceedings of 2018 IEEE International Conference on Robotics and Automation.Brisbane:IEEE Press,2018:6076-6081. |
| [52] | GIM K G, KIM J, YAMANE K .Design and fabrication of a bipedal robot using serial-parallel hybrid leg mechanism[C]∥ Proceedings of International Conference on Intelligent Robots and Systems.Piscataway:IEEE Press,2018:5095-5110. |
| [53] | KIM K, SPIELER P, LUPU E S,et al .A bipedal walking robot that can fly,slackline,and skateboard [J].Science Robotics,2021,6(59):1-14. |
| [54] | TANG J, ZHU Y, GAN W,et al .Design,control,and validation of a symmetrical hip and straight-legged vertically-compliant bipedal robot[J].Biomimetics,2023,8(4):340/1-22. |
| [55] | XU Y Z, LUO Z R, BAI X J,et al .Design and experiments of a human-leg-inspired omnidirectional robotic leg[J].Journal of Bionic Engineering,2023,20(6):2570-2589. |
| [56] | CHIGNOLI M, KIM D, STANGER-JONES E,et al .The MIT humanoid robot:design,motion planning,and control for acrobatic behaviors[C]∥ Proceedings of International conference on humanoid robots.Piscata-way:IEEE Press,2021:1-8. |
| [57] | 石照耀,丁宏钰,汪文广,等 .双足机器人腿部新构型设计与试验研究[J].机械工程学报,2023,59(1):103-112. |
| SHI Zhaoyao, DING Hongyu, WANG Wenguang,et al .Design and experimental research on the novel leg configuration of bipedal robot[J].Journal of Mechanical Engineering,2023,59(1):103-112. | |
| [58] | 丁宏钰 .双足机器人腿部及其驱动器的设计理论与关键技术研究[D].北京:北京工业大学,2022. |
| [59] | LOHMEIER S, BUSCHMANN T, SCHWIENBACHER M,et al .Leg design for a humanoid walking robot [C]∥ Proceedings of 6th IEEE-RAS International Conference on Humanoid Robots. Piscataway:IEEE Press,2006:536-541. |
| [60] | LOHMEIER S, BUSCHMANN T, ULBRICH H,et al .Modular joint design for performance enhanced humanoid robot LOLA[C]∥ Proceedings of the 2006 IEEE International Conference on Robotics and Automation.Piscataway:IEEE Press,2006:88-93. |
| [61] | BUSCHMANN T, LOHMEIER S, ULBRICH H .Humanoid robot LOLA:design and walking control[J].Journal of Physiology-Paris,2009,103(3):141-148. |
| [62] | ESSER J, KUMAR S, PETERS H,et al .Design,analysis and control of the series-parallel hybrid RH5 humanoid robot[C]∥ Proceedings of 2020 IEEE-RAS 20th International Conference on Humanoid Robots (Humanoids).Munich:IEEE Press,2021:400-407. |
| [63] | DONG C, CHEN X C, YU Z G,et al .Swift running robot leg:mechanism design and motion-guided optimization[J].IEEE/ASME Transactions on Mechatronics,2024,29(3):1702-1713. |
| [64] | Inc Tesla .Tesla Bot[EB/OL].(2023-12-12)[2024-05-09].. |
| [65] | LOIS L, JAMES B, JOSH P,et al .A compliant robotic leg based on fibre jamming[J].Transactions on Robotics,2024,40:4578-4597. |
| [66] | HU Y S, Wu X Y, DING H Y,et al .Study of series-parallel mechanism used in legs of biped robot[C]∥Proceedings of 2021 7th International Conference on Control,Automation and Robotics.Piscataway:IEEE Press,2021:97-102. |
| [67] | LI Z Y, CHEN X, PENG X B,et al .Reinforcement learning for robust parameterized locomotion control of bipedal robots[C]∥ Proceedings of IEEE International Conference on Robotics and Automation.Piscataway:IEEE Press, 2021:2811-2817. |
| [68] | RADOSAVOVIC I, XIAO T, ZHANG B,et al .Real-world humanoid locomotion with reinforcement learning.Science robotics,2024,89(9):1-32. |
| [1] | 赵京 王炎 陈雨青. 基于预设性能函数的机械臂快速无超调拟人运动控制算法[J]. 华南理工大学学报(自然科学版), 2019, 47(10): 42-50. |
| [2] | 冯颖 冯俊杰 Subhash Rakheja 姜辉. 一种基于率相关回滞的压电带载驱动建模方法[J]. 华南理工大学学报(自然科学版), 2018, 46(8): 57-63. |
| [3] | 刘昶 石万凯 韩振华 徐浪. 基于插齿刀具运动控制的复合摆线齿轮加工方法 [J]. 华南理工大学学报(自然科学版), 2018, 46(2): 31-37. |
| [4] | 陈洁 李玉麒 刘庆飞 何山 詹仲强. 电致动驱动器的变形量研究[J]. 华南理工大学学报(自然科学版), 2016, 44(8): 13-17,25. |
| [5] | 高长虹 丛大成 杨志东 曲智勇. 冗余驱动液压振动台内力耦合动态抑制策略[J]. 华南理工大学学报(自然科学版), 2016, 44(1): 93-99. |
| [6] | 王振民 张芩 杜贵平. 大功率模块高频驱动器的设计及实验分析[J]. 华南理工大学学报(自然科学版), 2013, 41(7): 50-55. |
| [7] | 邱志成 凌德芳. 压电悬臂板的非线性振动控制[J]. 华南理工大学学报(自然科学版), 2012, 40(11): 45-51. |
| [8] | 张宇辉 李迪. 工业以太环网的最低松弛度优先信息调度算法[J]. 华南理工大学学报(自然科学版), 2011, 39(2): 76-80. |
| [9] | 赵维俭 李迪. CAN网络化运动控制系统的动态带宽分配算法[J]. 华南理工大学学报(自然科学版), 2010, 38(10): 61-67. |
| [10] | 牛荣军 黄平. 磁头表面结构对硬盘驱动器气膜润滑特性的影响[J]. 华南理工大学学报(自然科学版), 2007, 35(8): 38-43. |
| [11] | 张铁 谢存禧 龚树强. 基于DSP的巡逻保安机器人的运动控制系统[J]. 华南理工大学学报(自然科学版), 2006, 34(7): 26-30. |
| [12] | 沈星, 袁慎芳, 王鑫伟, 等. 铜-压电陶瓷复合型驱动器的制备及特性[J]. 华南理工大学学报(自然科学版), 2004, 32(4): 11-14. |
| [13] | 陈展荣 徐娟 禹智涛. 柔性结构的自组织模糊主动振动控制[J]. 华南理工大学学报(自然科学版), 2004, 32(3): 61-65. |
| [14] | 吴捷, 雷春林, 陈渊睿, 等. 基于智能功率模块的电动机伺服驱动器[J]. 华南理工大学学报(自然科学版), 2004, 32(12): 61-64,73. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||

