华南理工大学学报(自然科学版) ›› 2023, Vol. 51 ›› Issue (1): 16-21.doi: 10.12141/j.issn.1000-565X.220066
所属专题: 2023年机械工程
关节角参数化结合接近矢量可行方向的五自由度机械臂逆运动学求解
万珍平1 罗钊1 陆龙生1 张端康1 赵明华2 吕晓能2
- 1.华南理工大学 机械与汽车工程学院,广东 广州 510640
2.广东南牧机械设备有限公司,广东 云浮 527300
Inverse Kinematics Solution of 5-DOF Manipulator via Joint Angle Parameterization and Feasible Direction of Approach Vector
WAN Zhenping1 LUO Zhao1 LU Longsheng1 ZHANG Duankang1 ZHAO Minghua2 LÜ Xiaoneng2
- 1.School of Mechanical and Automotive Engineering,South China University of Technology,Guangzhou 510640,Guangdong,China
2.Guangdong Nanmu Machinery Equipment Co. ,Ltd. ,Yunfu 527300,Guangdong,China
摘要:
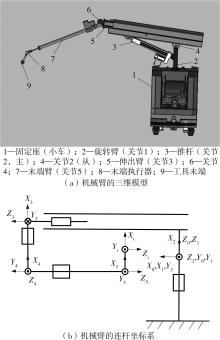
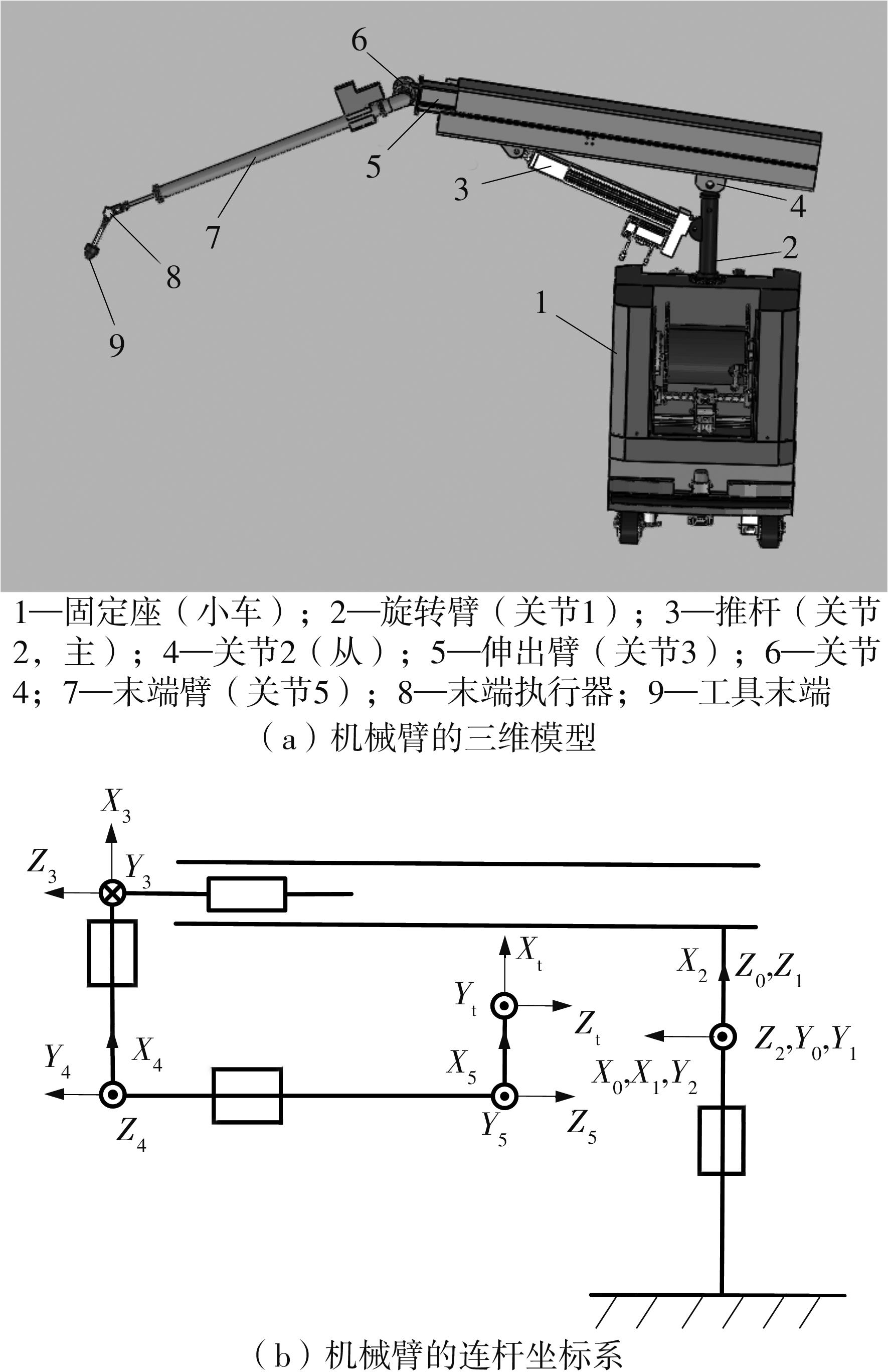
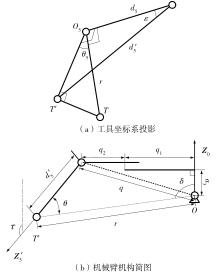
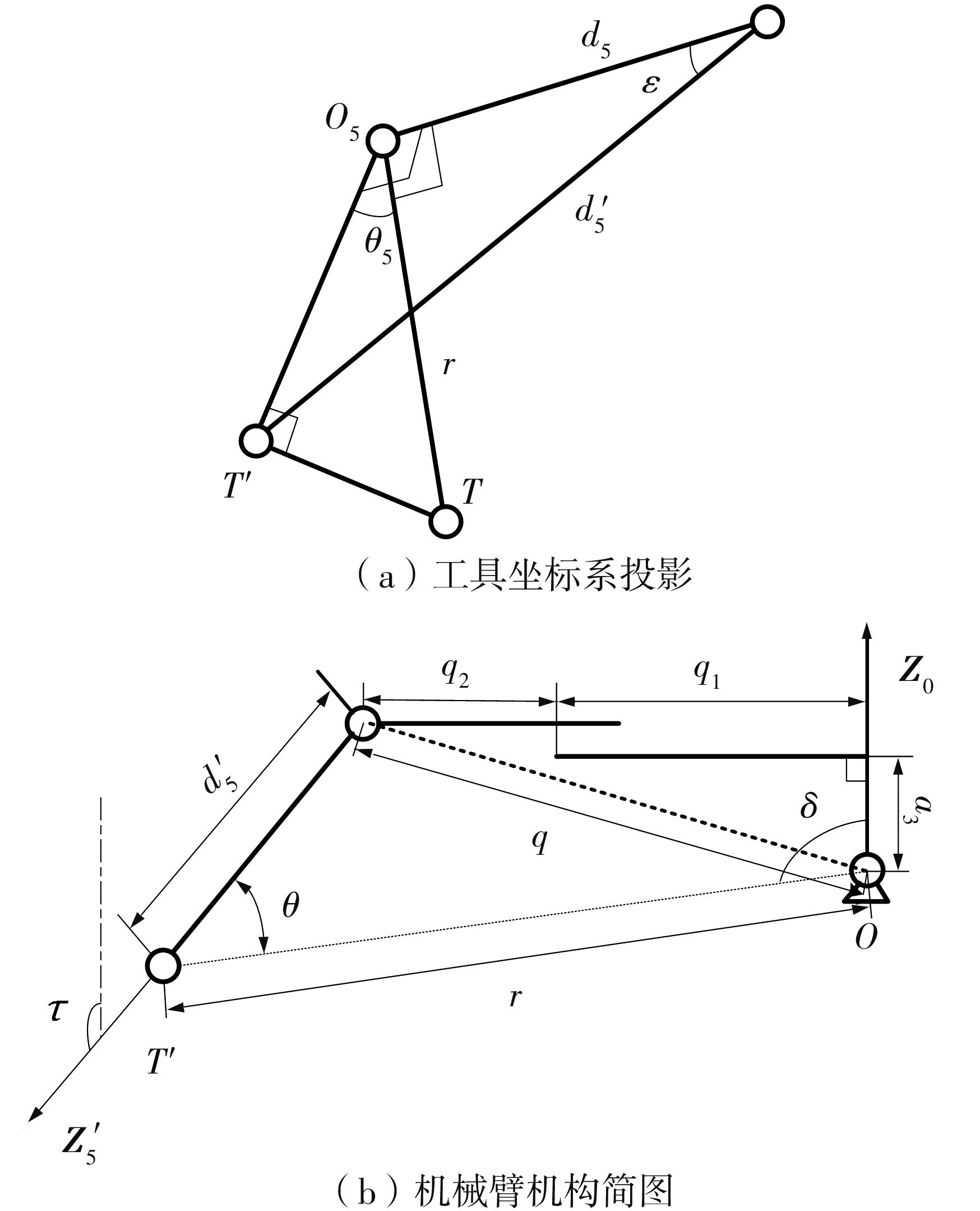
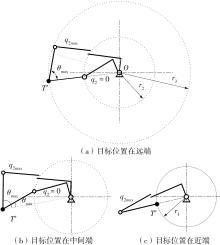
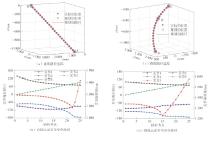
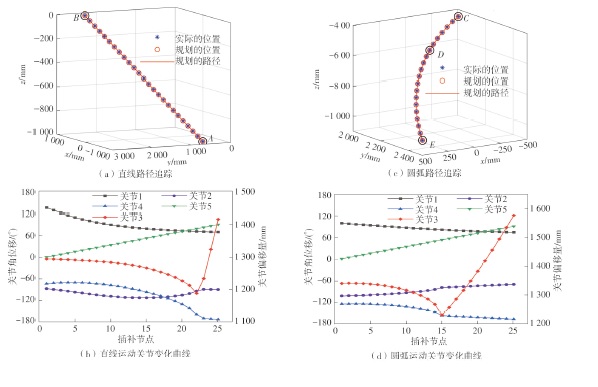
五自由度的机械臂无法达到任意位姿,采用传统的位姿描述方式进行逆运动学求解时,极易产生无解的情况。文中以一种适用于清洁、喷涂、焊接等作业的、由4个旋转关节和1个移动关节构成的五自由度机械臂为例,建立运动学模型并进行逆运动学分析,在此基础上,提出一种关节角参数化结合接近矢量可行方向的逆运动学求解方法。该方法基于自由度约束的末端位姿描述,先通过关节角参数化将末端执行器的运动空间由三维降为二维,再采用几何法分析末端执行器在不同目标位置(远端、中间端、近端)时的接近矢量的可行方向,从而避免参数盲目取值,确保运动学逆解的存在,然后根据运动连续性和各关节的运动范围从中筛选出最优解。路径规划仿真结果表明,实际路径与规划路径非常吻合,关节运动平稳,证明了所提方法的可行性和准确性。文中研究的五自由度机械臂具有一定的代表性,逆运动学求解方法计算复杂度低,求解过程较为简便,求解思路可为欠自由度机械臂的逆运动学求解提供借鉴。
中图分类号: