华南理工大学学报(自然科学版) ›› 2023, Vol. 51 ›› Issue (12): 21-33.doi: 10.12141/j.issn.1000-565X.220695
所属专题: 2023年机械工程
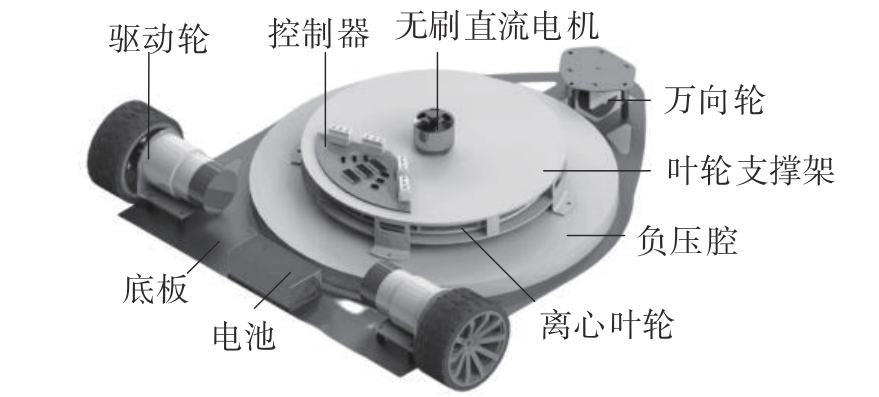
负压吸附桥梁检测爬壁机器人的本体结构优化设计
黄海新1 王峥1 程寿山2 李春明3
- 1.河北工业大学 土木与交通学院,天津 300401
2.交通运输部 公路科学研究所,北京 100080
3.天津市交通运输基础设施养护集团有限公司,天津 300401
Optimized Design of the Main Structure of a Wall-Climbing Robot for Bridge Detection Based on Negative Pressure Adsorption
HUANG Haixin1 WANG Zheng1 CHENG Shoushan2 LI Chunming3
- 1.School of Civil and Transportation Engineering,Hebei University of Technology,Tianjin 300401,China
2.Research Institute of Highway Ministry of Transport,Beijing 100080,China
3.Tianjin Transportation Infrastructure Maintenance Group Co. ,Ltd. ,Tianjin 300401,China
摘要:
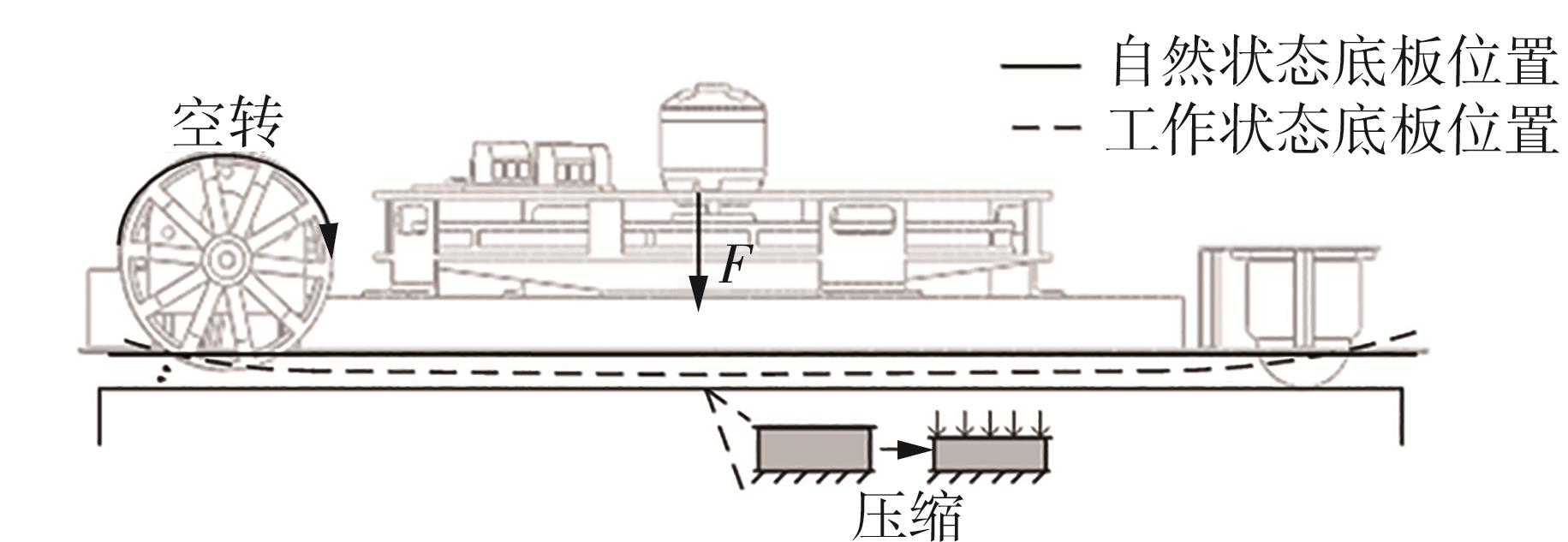
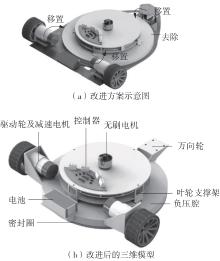
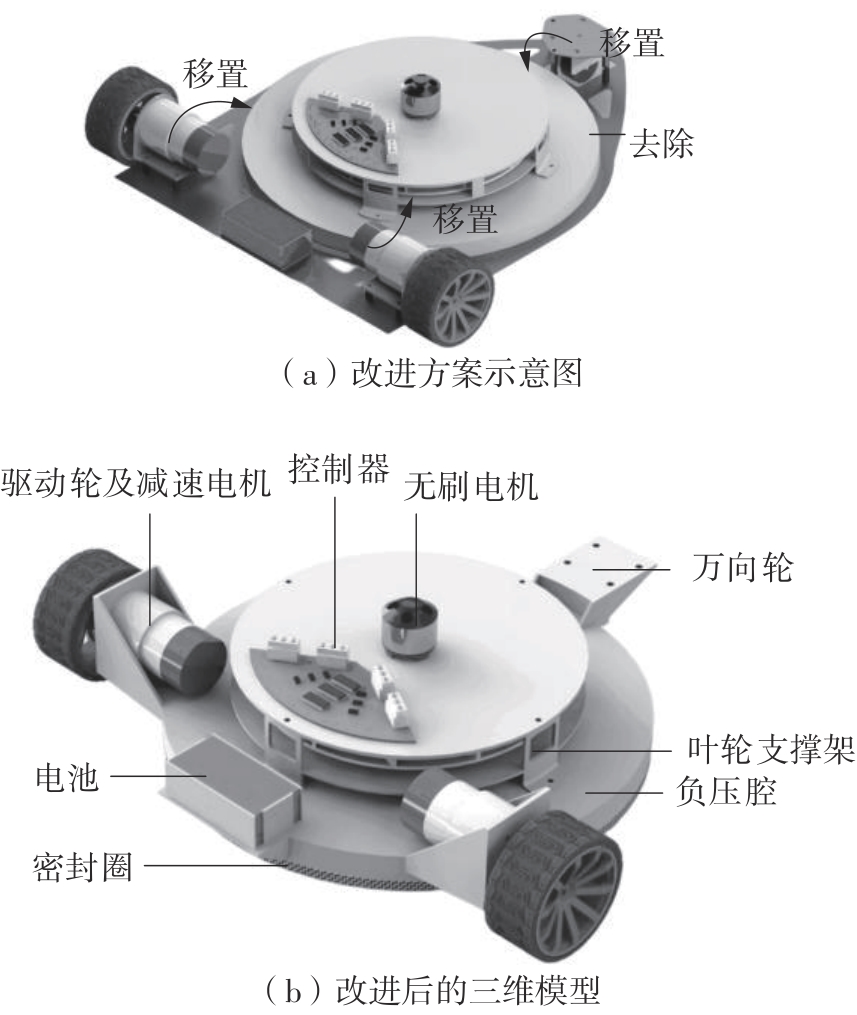
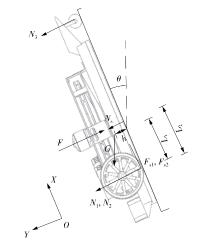
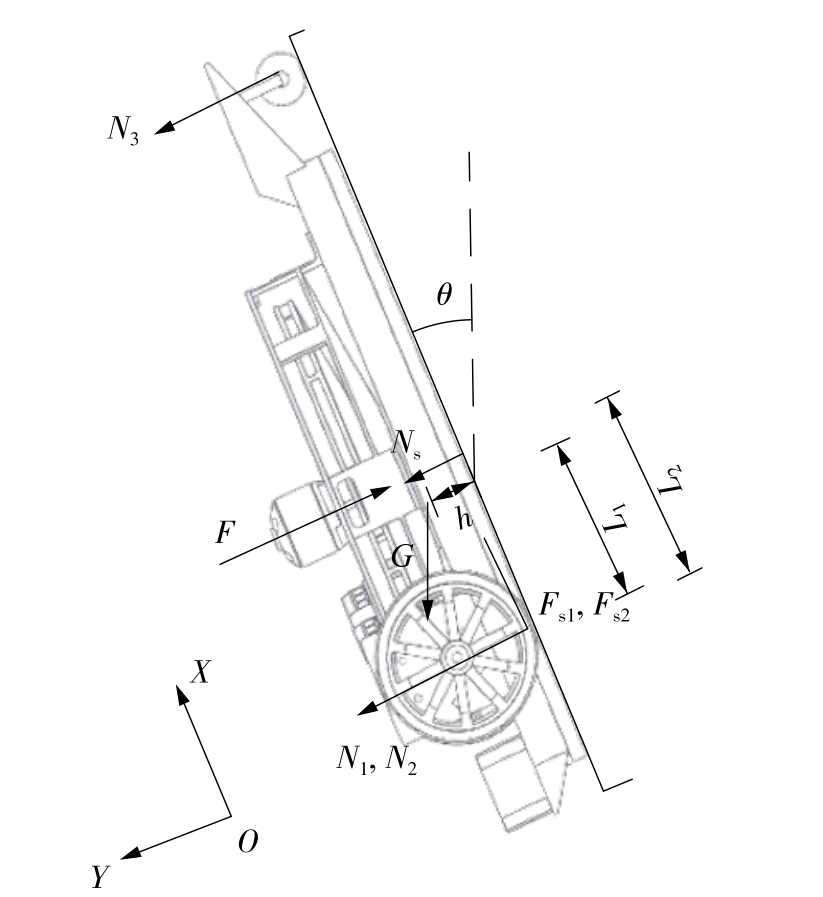
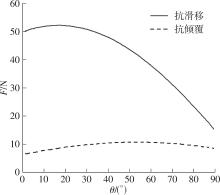
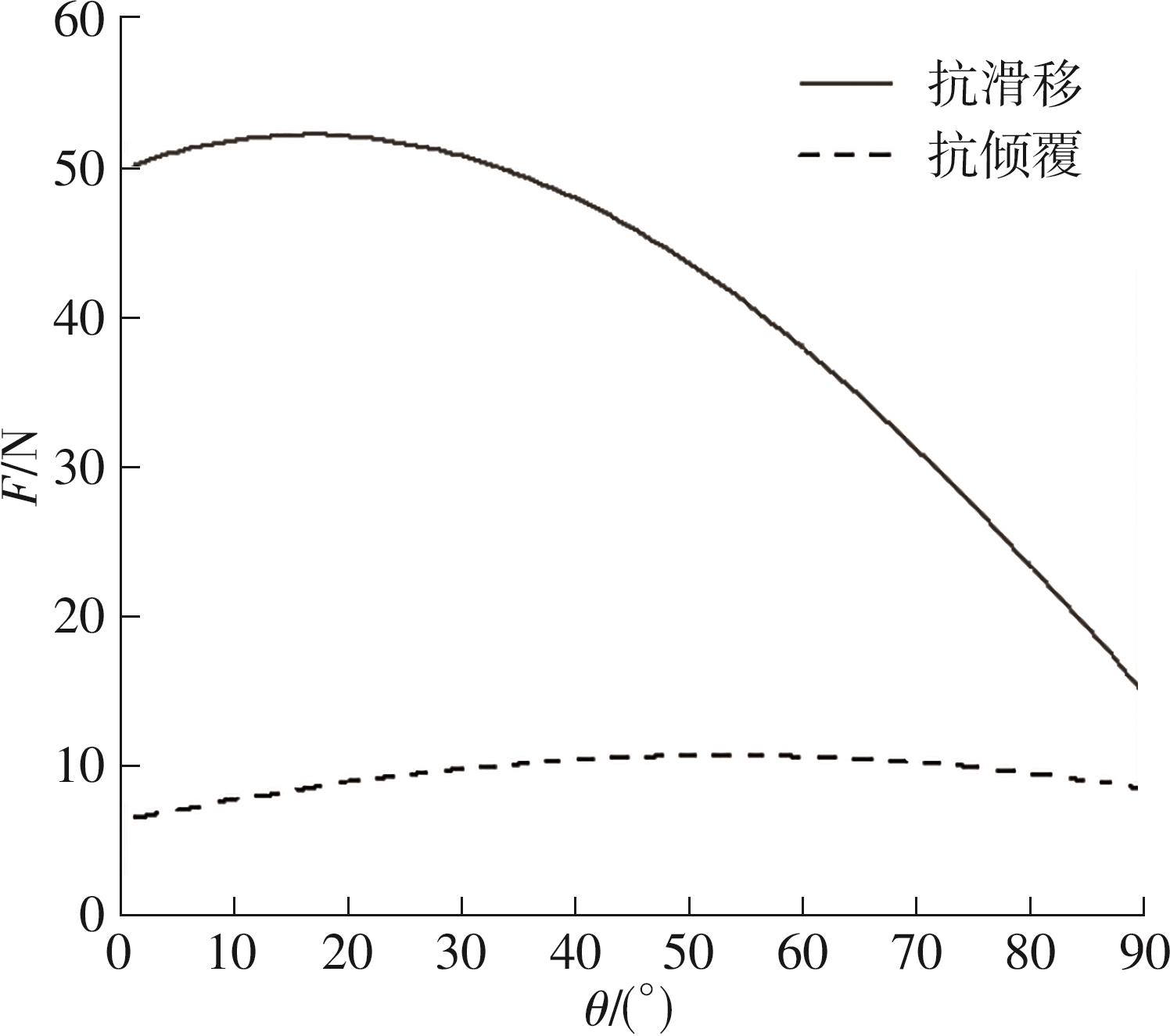
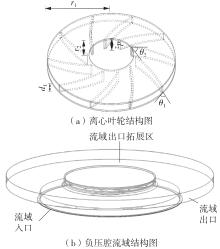
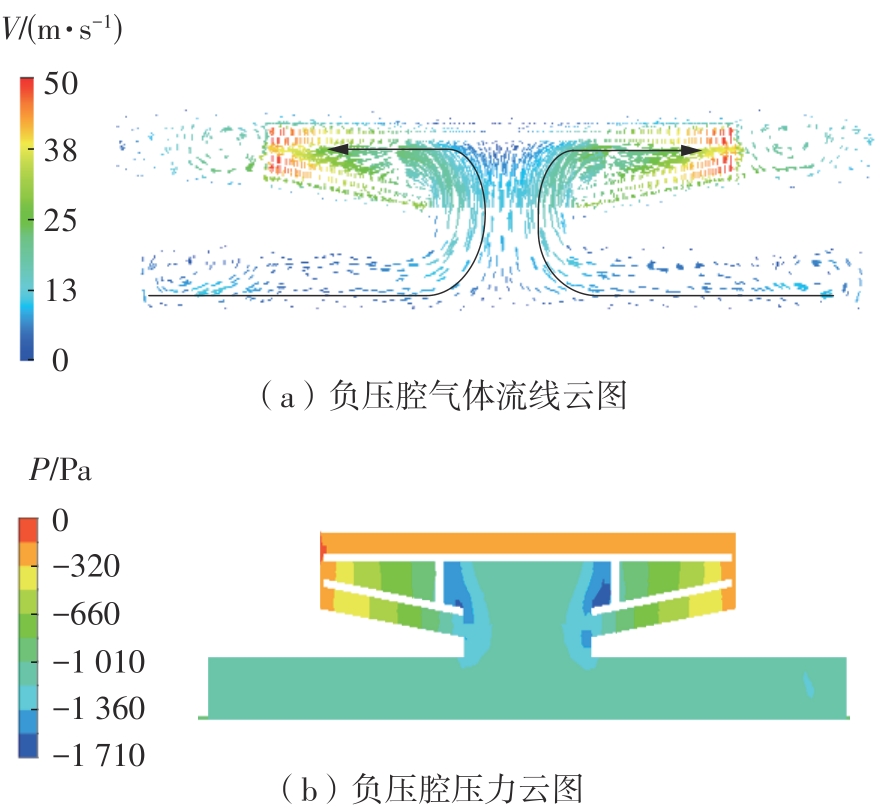
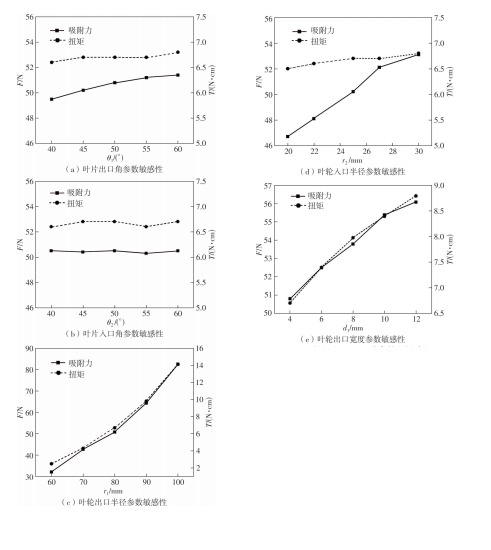
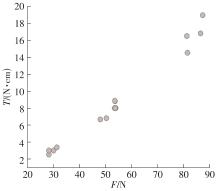
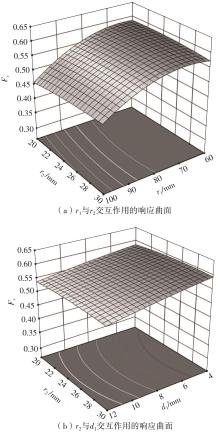
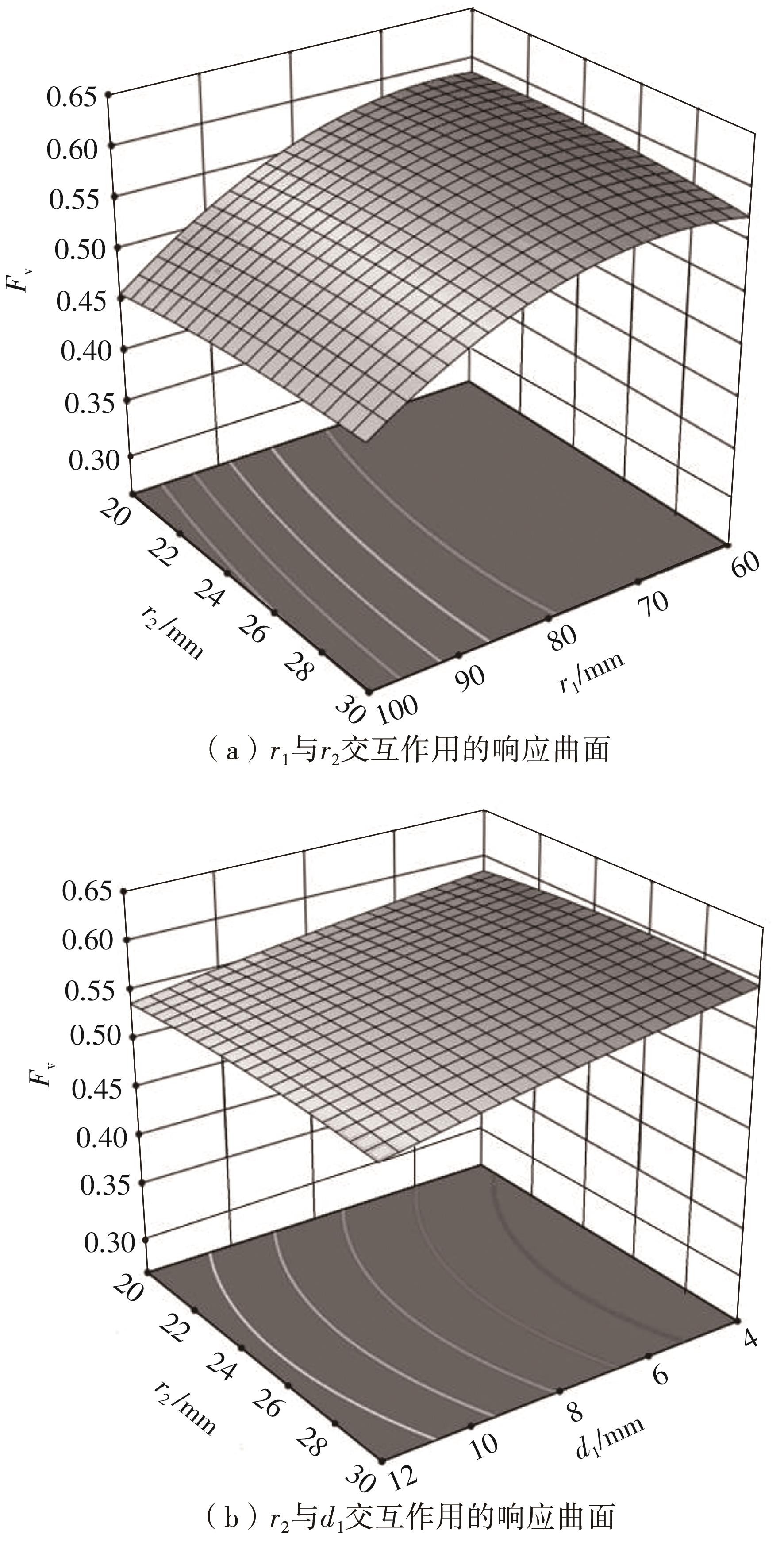
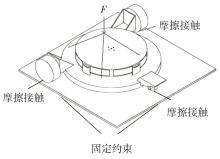
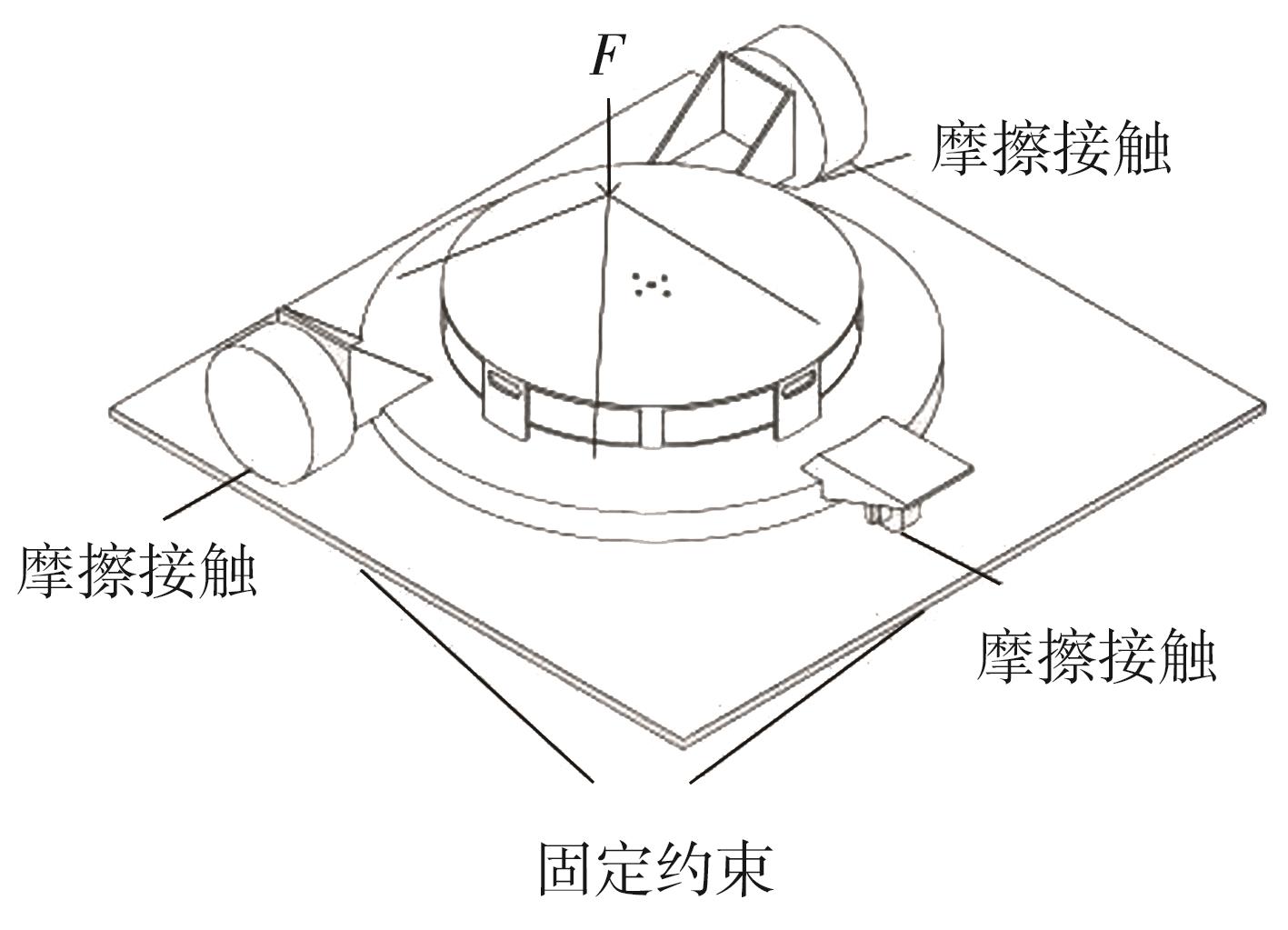
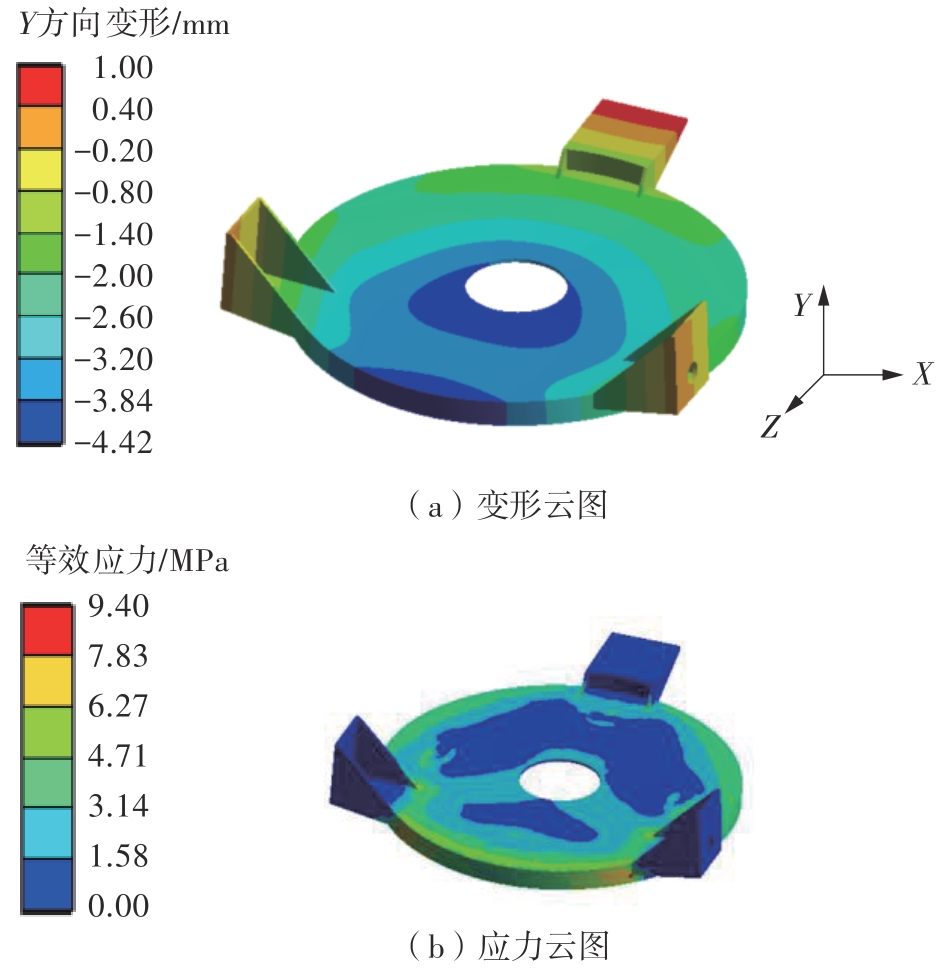
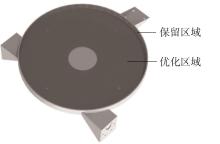
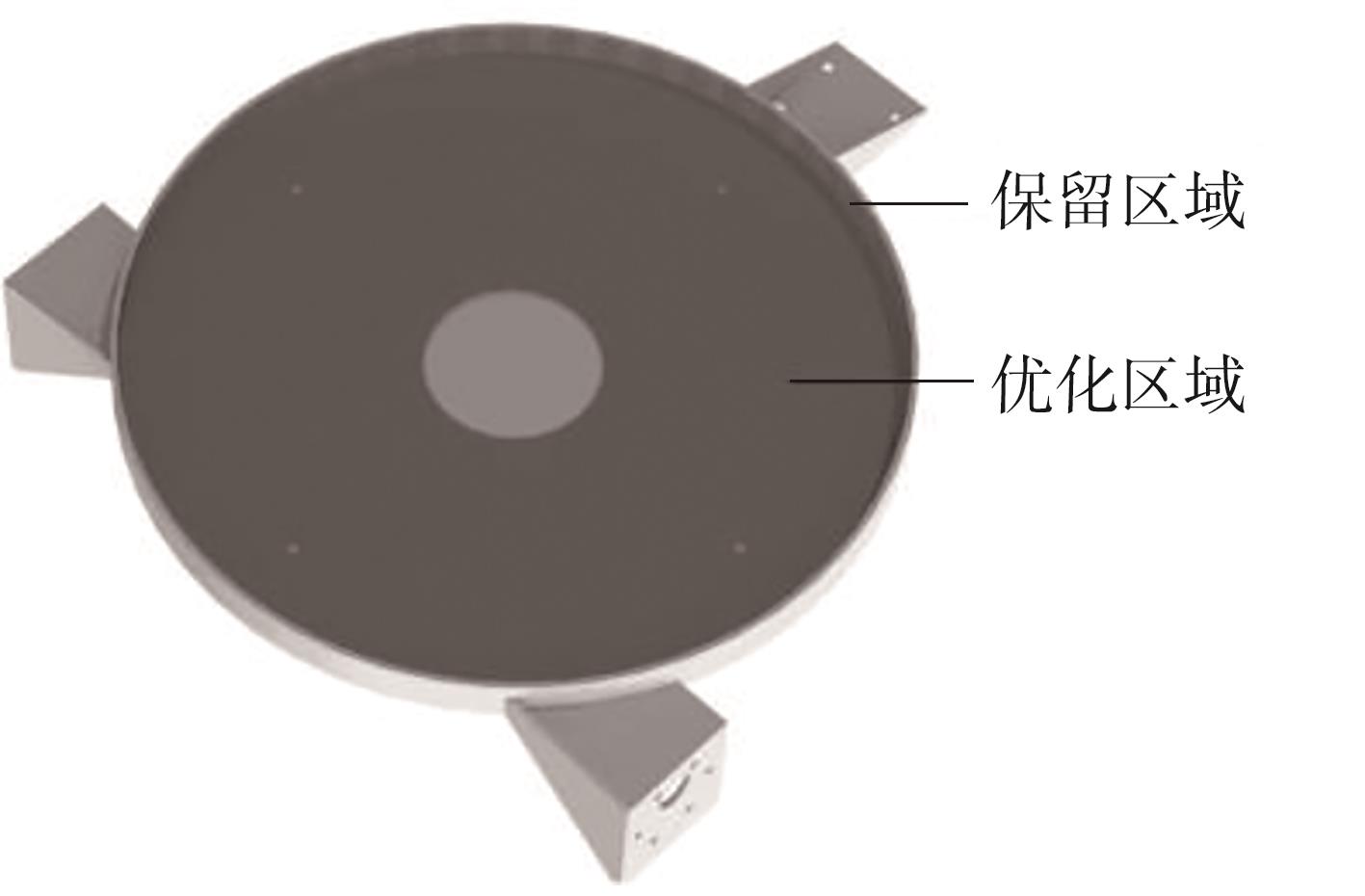
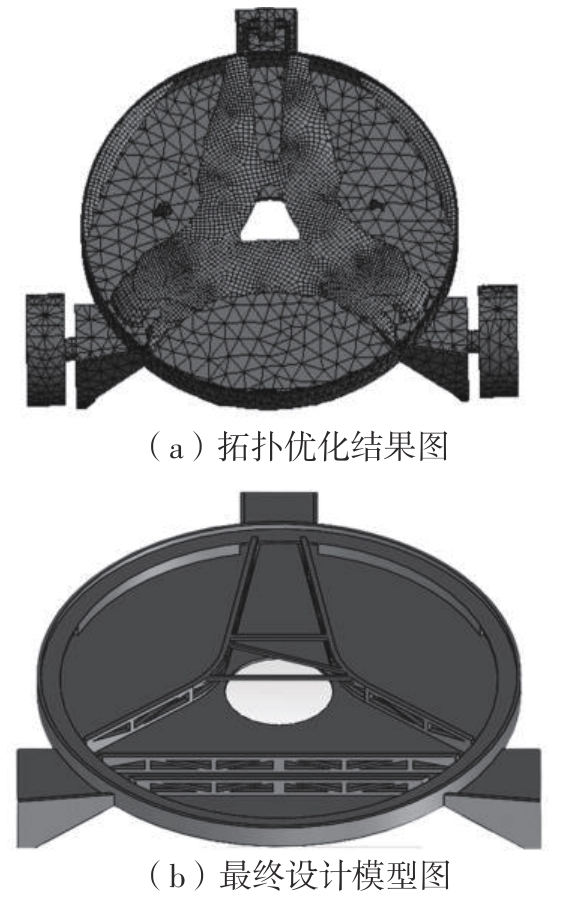
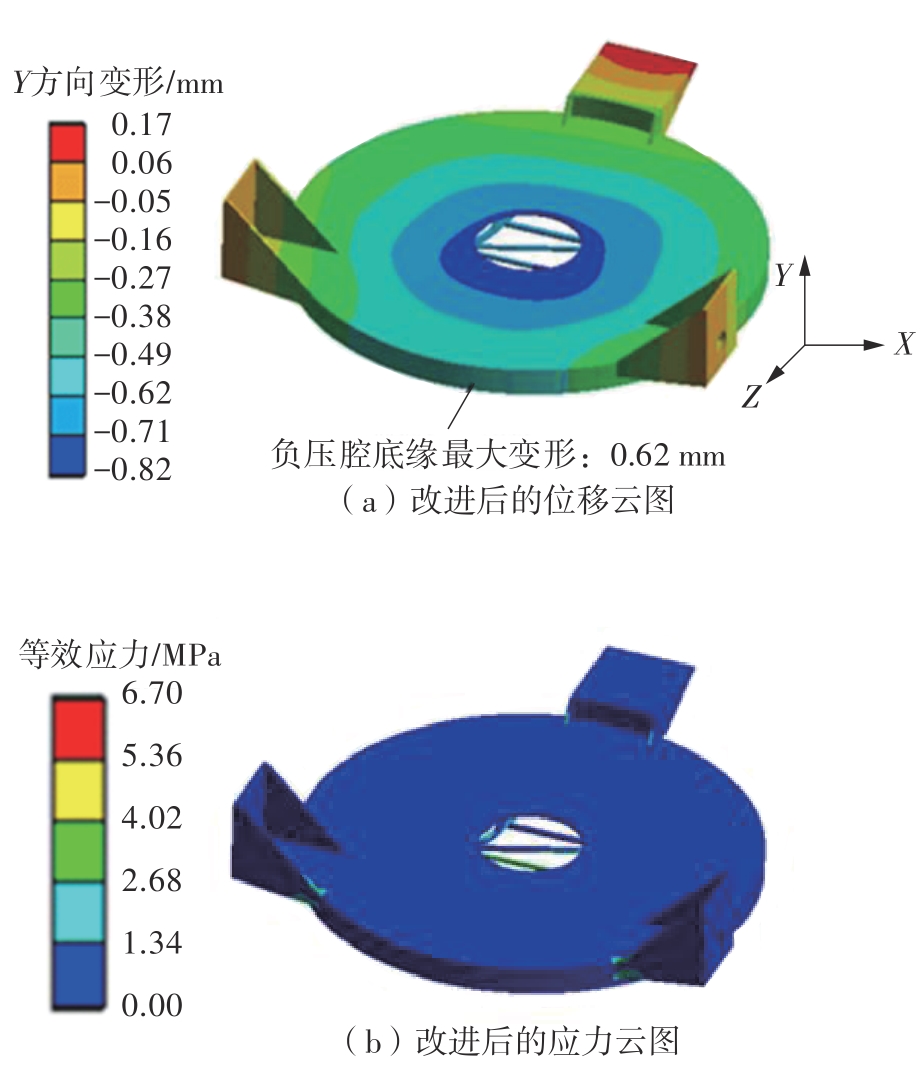
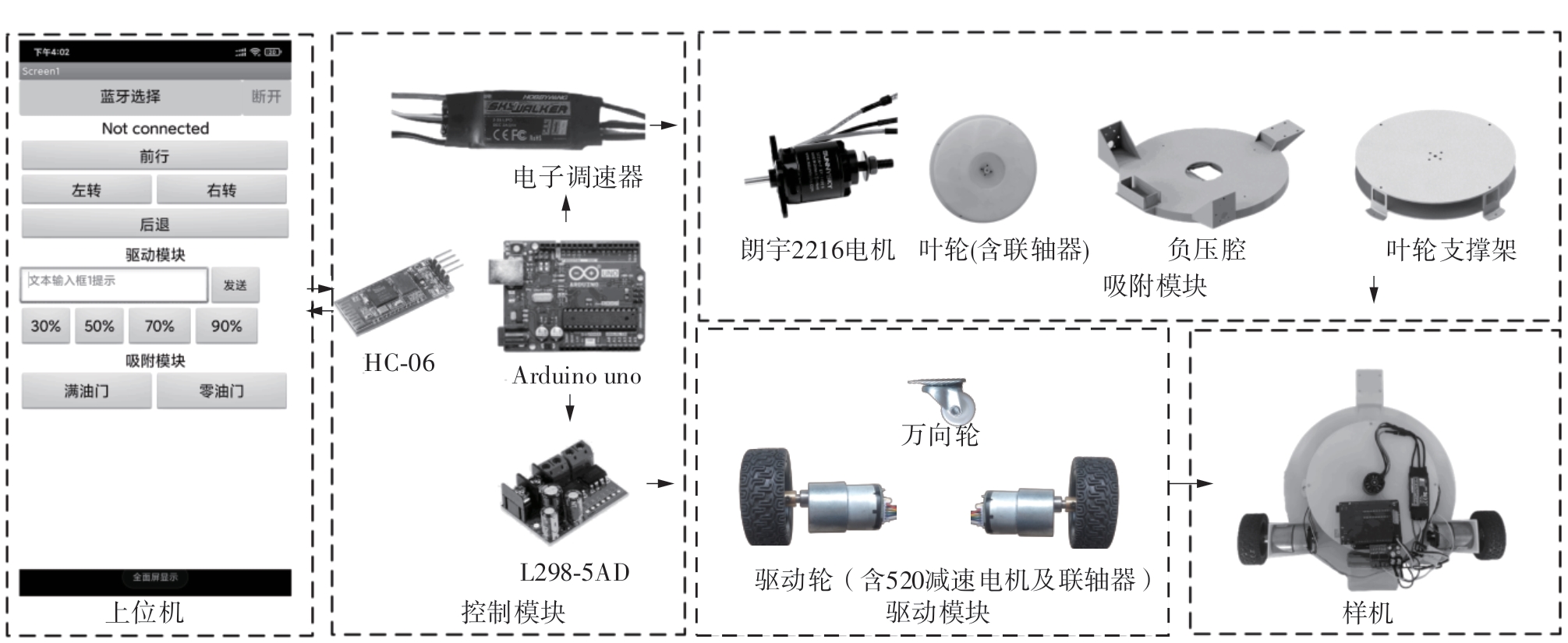
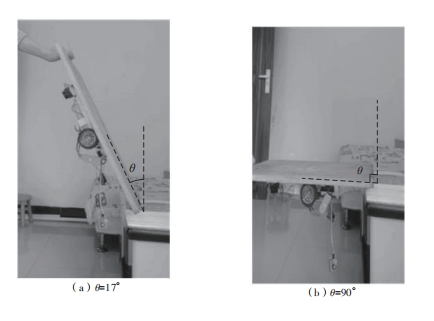
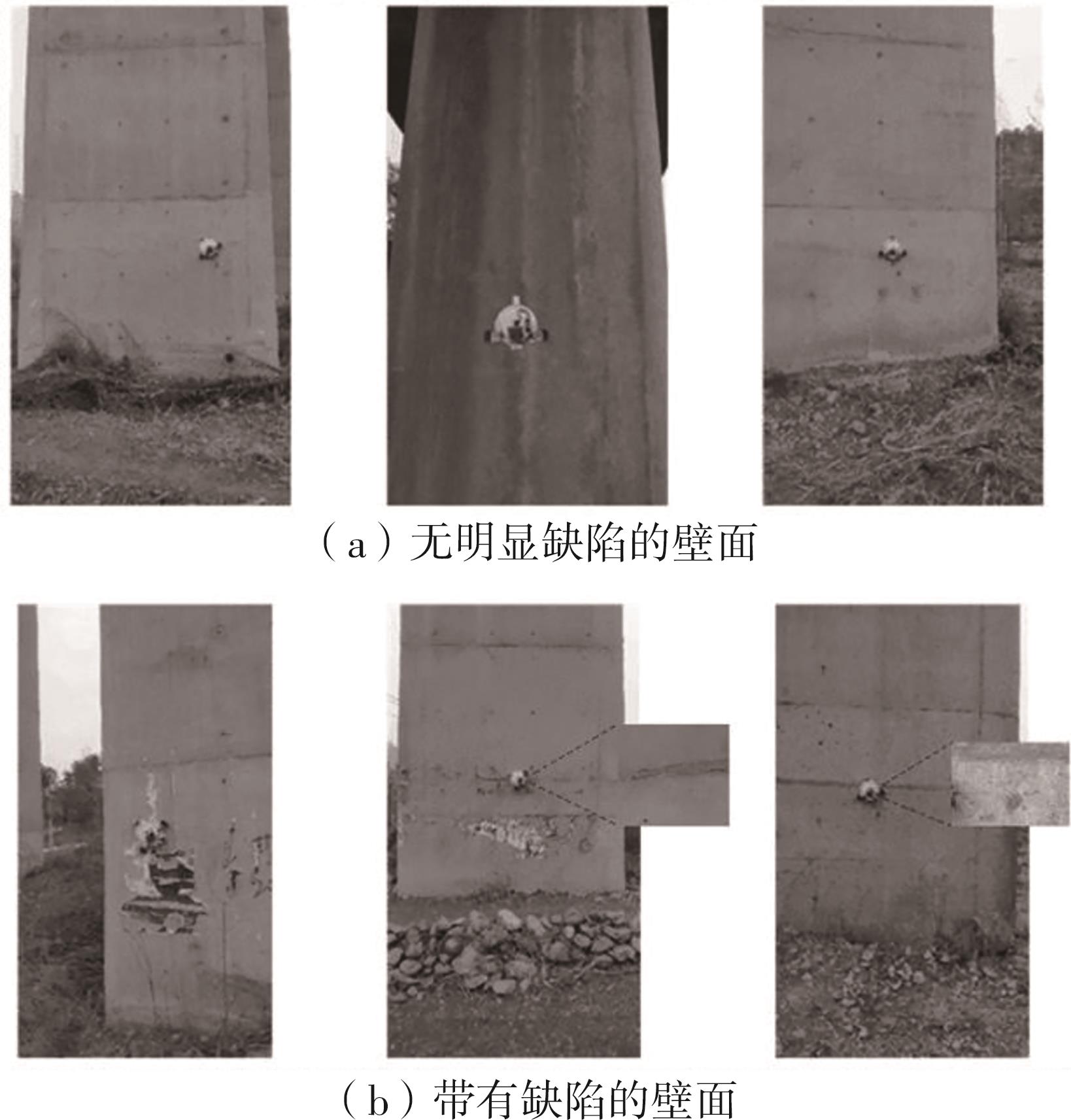
针对桥梁高墩、梁底等区域检测困难的问题,设计开发了一款基于负压吸附的桥梁病害检测爬壁机器人。针对其自身的吸附稳定性,建立并推导了满足抗滑移和抗倾覆条件下的吸附力指标计算式,据此确定能在各角度壁面实现稳定吸附时机器人所需的最小吸附力。结果表明:为确保机器人可靠工作,吸附模块需提供53.0 N的吸附力;结合经验公式给出离心叶轮的初步设计方案并利用Fluent对叶轮流域进行流体力学仿真及响应面优化,建立了由吸附力与扭矩共同构成的评价函数,并给出了函数值最佳时的叶轮设计参数,使吸附模块在满足稳定性的前提下,综合评价函数值较初设方案提升了3.4 %;对负压腔进行拓扑优化,综合考虑拓扑优化结果及负压腔气动性能,获得了腔体内加强肋的构造及布置形式,其中与车轮支撑臂相衔接的加劲肋为“八”字形与直线型镂空构造设计;优化后负压腔的最大竖向位移值减小为原模型的18.5 %,而质量仅增加了16.9 %,加强肋的精准布设效果明显,成功将竖向变形控制在了合理的范围内。最后,利用UTR6180型光敏树脂借助3D打印工艺完成了样机制作,其尺寸约为300 mm×280 mm×15 mm,质量约为1.15 kg。将样机置于多工况下进行性能测试,结果表明:本研究设计开发的爬壁机器人可在多种桥梁壁面稳定吸附并行进,不存在打滑、漂移现象。
中图分类号: