
Journal of South China University of Technology(Natural Science) >
Real-Time Template Matching Method for Edge Features
Received date: 2022-11-12
Online published: 2023-03-16
Supported by
the National Key R&D Program of China(2020YFB1711300)
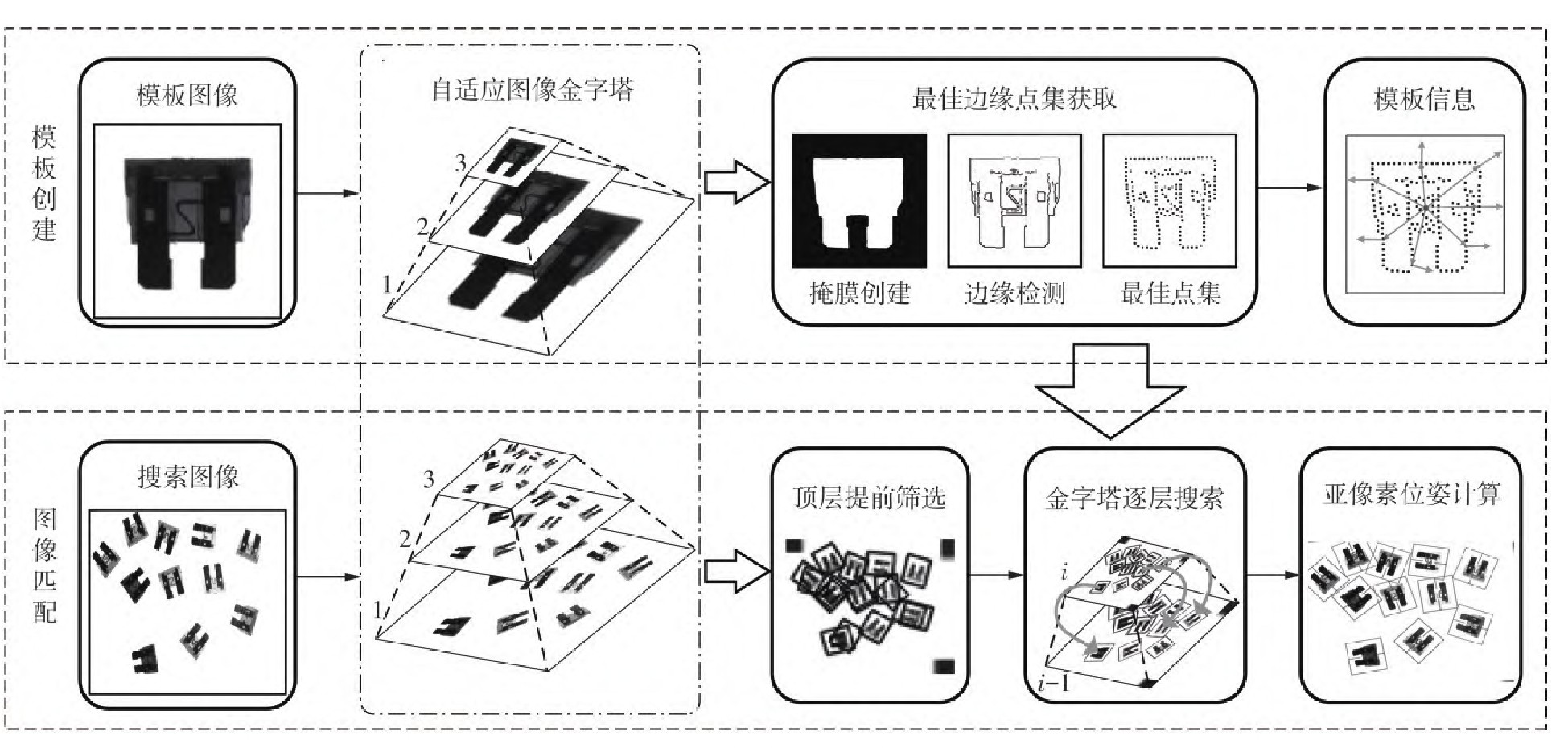
Template matching is a common key technology in the field of machine vision. Currently, edge feature-based template matching methods are facing challenges such as time-consuming searching and low matching accuracy in a complex environment. In order to ensure the robustness while improving the real-time performance, this paper proposed a real-time edge feature-based template matching method. Firstly, in the stage of template creation, a new edge sparse method was proposed, and it can screen out the strong invariant edge points from the template image. It reduces the redundancy of template information while retaining the key template features to ensure the stability and improve the computing efficiency. Secondly, in the stage of pyramid search-based image-matching, a top-level pre-screening method was proposed. Normalized Manhattan distance was used as a constraint to exclude incorrect target poses from the top search results to speed up the search in subsequent layers. Five datasets with different working conditions were constructed, and the proposed template matching method was compared and applied to the fast visual dispensing process for free plane pose. The experimental results show that the proposed matching method can significantly improve the matching speed while ensuring high accuracy. And it can overcome interference factors such as illumination change, rotation, defects, multiple targets, and occlusion, enabling practical applications that require both high robustness and real-time performance.
Key words: machine vision; template matching; edge feature; image pyramid; visual dispensing
WANG Shiyong , QIAN Guokang , LI Di , ZHANG Wujie . Real-Time Template Matching Method for Edge Features[J]. Journal of South China University of Technology(Natural Science), 2023 , 51(9) : 1 -10 . DOI: 10.12141/j.issn.1000-565X.220745
| 1 | MA J, JIANG X, FAN A,et al .Image matching from handcrafted to deep features:A survey[J].International Journal of Computer Vision,2021,129(1):23-79. |
| 2 | QI X, MIAO L .A template matching method for multiscale and rotated images using ring projection vector conversion[C]∥ Proceedings of the 2018 IEEE 3rd International Conference on Image,Vision and Computing (ICIVC).Chongqing:IEEE,2018:45-49. |
| 3 | KAI B,UWE D .Template matching using fast normalized cross correlation[EB/OL].[2022-10-20].. |
| 4 | BAI L, YANG X, GAO H .Corner point-based coarse-fine method for surface-mount component positioning[J].IEEE Transactions on Industrial Informatics,2018,14(3):877-886. |
| 5 | YANG H, ZHENG S, LU J,et al .Polygon-invariant generalized hough transform for high-speed vision-based positioning[J].IEEE Transactions on Automation Science and Engineering,2016,13(3):1367-1384. |
| 6 | DALAL N, TRIGGS B .Histograms of oriented gradients for human detection[C]∥ Proceedings of the 2005 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR’05).San Diego:IEEE,2005:886-893. |
| 7 | JIANG X, XIA Y, ZHANG X,et al .Robust image matching via local graph structure consensus[J].Pattern Recognition,2022,126:108588/1-14. |
| 8 | KE W, ZHANG T, HUANG Z,et al .Multiple anchor learning for visual object detection[C]∥ Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR).Seattle:IEEE,2020:10203-10212. |
| 9 | ULRICH M, FOLLMANN P, NEUDECK J .A comparison of shape-based matching with deep-learning-based object detection[J].tm-Technisches Messen,2019,86(11):685-698. |
| 10 | HINTERSTOISSER S, CAGNIART C, ILIC S,et al .Gradient response maps for real-time detection of textureless objects[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,2012,34(5):876-888. |
| 11 | PENG X .Combine color and shape in real-time detection of texture-less objects[J].Comput Vis Image Underst,2015,135:31-48. |
| 12 | WU Q, XU G, CHENG Y,et al .Histogram of maximal pointedge orientation for multi-source image matching[J].International Journal of Remote Sensing,Taylor & Francis,2020,41(14):5166-5185. |
| 13 | 吴晓军,邹广华 .基于边缘几何特征的高性能模板匹配算法[J].仪器仪表学报,2013,34(7):23-30. |
| WU Xiaojun, ZOU Guanghua .High performance template matching algorithm based on edge geometric features[J].Chinese Journal of Scientific Instrument,2013,34(7):23-30. | |
| 14 | CHAN J, LEE J A, KEMAO Q .BORDER:An oriented rectangles approach to texture-less object recognition [C]∥ Proceedins of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR).Las Vegas:IEEE,2016:2855-2863. |
| 15 | LE T S, LIN C Y .GPU-accelerated image alignment for object detection in industrial applications[C]∥ Proceedins of the 2017 International Conference on Advanced Robotics and Intelligent Systems (ARIS).Taipei:IEEE,2017:13-16. |
| 16 | TSAI C, YU C .Real-time textureless object detection and recognition based on an edge-based hierarchical template matching algorithm[J].Journal of Applied Science and Engineering,2018,21(2):229-240. |
| 17 | 王凯,余振军,何显辉,等 .改进的多尺度形状模板匹配算法[J].激光杂志,2022,43(4):82-87. |
| WANG Kai, YU Zhenjun, HE Xianhui,et al .Improved multi-scale shape template matching algorithm[J].Laser Journal,2022,43(4):82-87. | |
| 18 | ZHANG T, WEI S, JI S .E2EC:an end-to-end contour-based method for high-quality high-speed instance segmentation[C]∥ Proceedins of the 2022 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR).New Orleans:IEEE,2022:4433-4442. |
| 19 | 李华强,喻擎苍,方玫 .Canny算子中Otsu阈值分割法的运用[J].计算机工程与设计,2008(9):2297-2299. |
| LI Huaqiang, YU Qingcang, FANG Mei .Application of Otsu thresholding method on Canny operator [J].Computer Engineering and Design,2008(9):2297-2299. | |
| 20 | HOFHAUSER A, STEGER C, NAVAB N .Edge-based template matching with a harmonic deformation model[C]∥ RANCHORDAS A,ARAúJO H J,PEREIRA J M,et al.Proceedings of the International Conference on Computer Vision and Computer Graphics.Berlin,Heidelberg:Springer,2009:176-187. |
| 21 | B?TTGER T, STEGER C .Accurate and robust tracking of rigid objects in real time[J].Journal of Real-Time Image Processing,2021,18(3):493-510. |
| 22 | YU X, FEI X .Target image matching algorithm based on pyramid model and higher moments[J].Journal of Computational Science,2017,21:189-194. |
| 23 | CUI X, KIM H, PARK E,et al .Robust and accurate pattern matching in fuzzy space for fiducial mark alignment[J].Machine Vision and Applications,2013,24(3):447-459. |
/
| 〈 |
|
〉 |