Journal of South China University of Technology(Natural Science Edition) ›› 2023, Vol. 51 ›› Issue (9): 1-10.doi: 10.12141/j.issn.1000-565X.220745
Special Issue: 2023年机械工程
• Mechanical Engineering • Previous Articles Next Articles
Real-Time Template Matching Method for Edge Features
WANG Shiyong QIAN Guokang LI Di ZHANG Wujie
- School of Mechanical and Automotive Engineering,South China University of Technology,Guangzhou 510640,Guangdong,China
-
Received:2022-11-12Online:2023-09-25Published:2023-03-16 -
About author:王世勇(1981-),男,博士,副教授,主要从事嵌入式控制系统与智能制造系统研究。E-mail:mesywang@scut.edu.cn -
Supported by:the National Key R&D Program of China(2020YFB1711300)
CLC Number:
Cite this article
WANG Shiyong, QIAN Guokang, LI Di, et al.. Real-Time Template Matching Method for Edge Features[J]. Journal of South China University of Technology(Natural Science Edition), 2023, 51(9): 1-10.
share this article
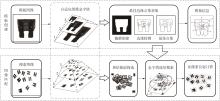
Fig.1
Overall technical framework"
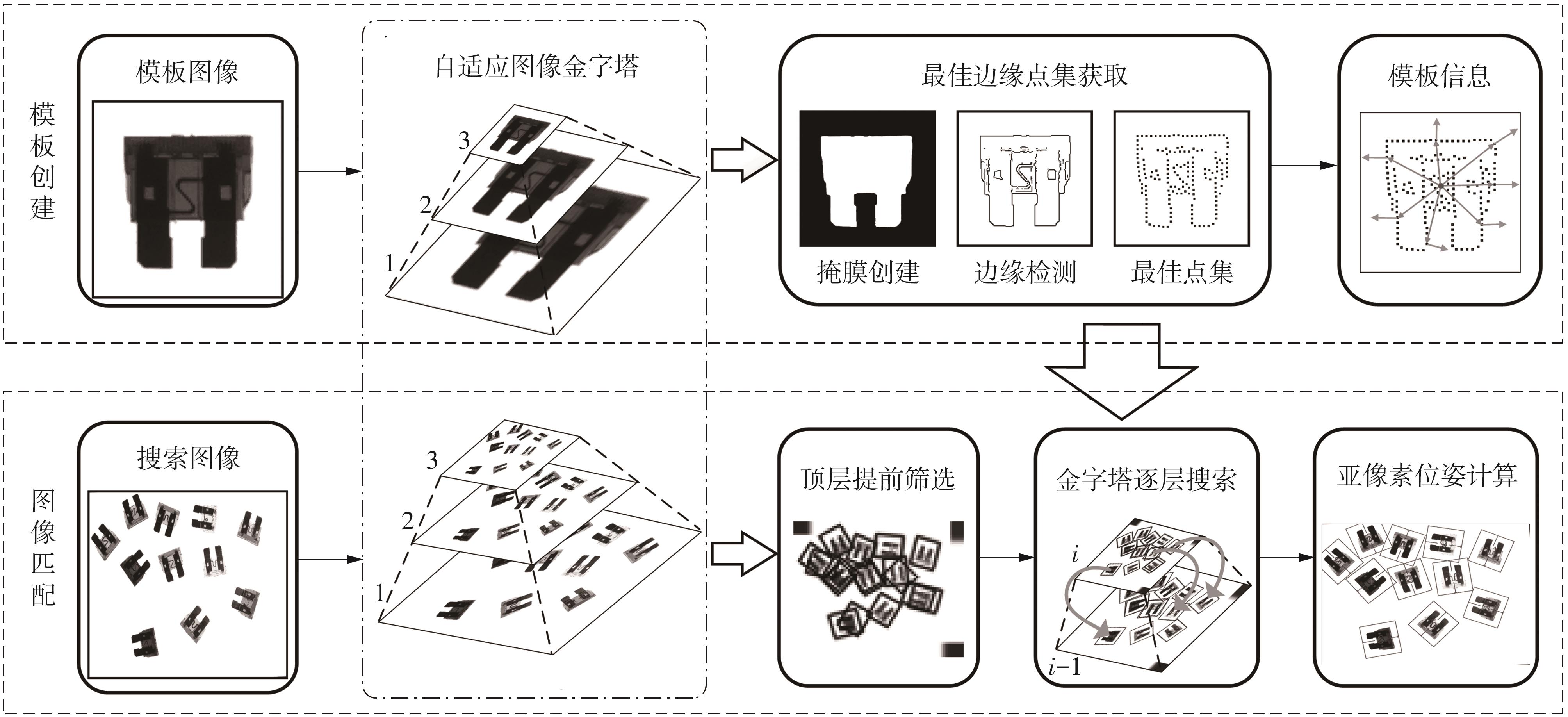
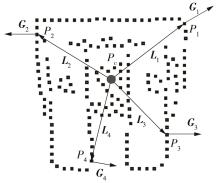
Fig.2
Illustration of template information descriptors"

Fig.3
A top-level pre-screening example"
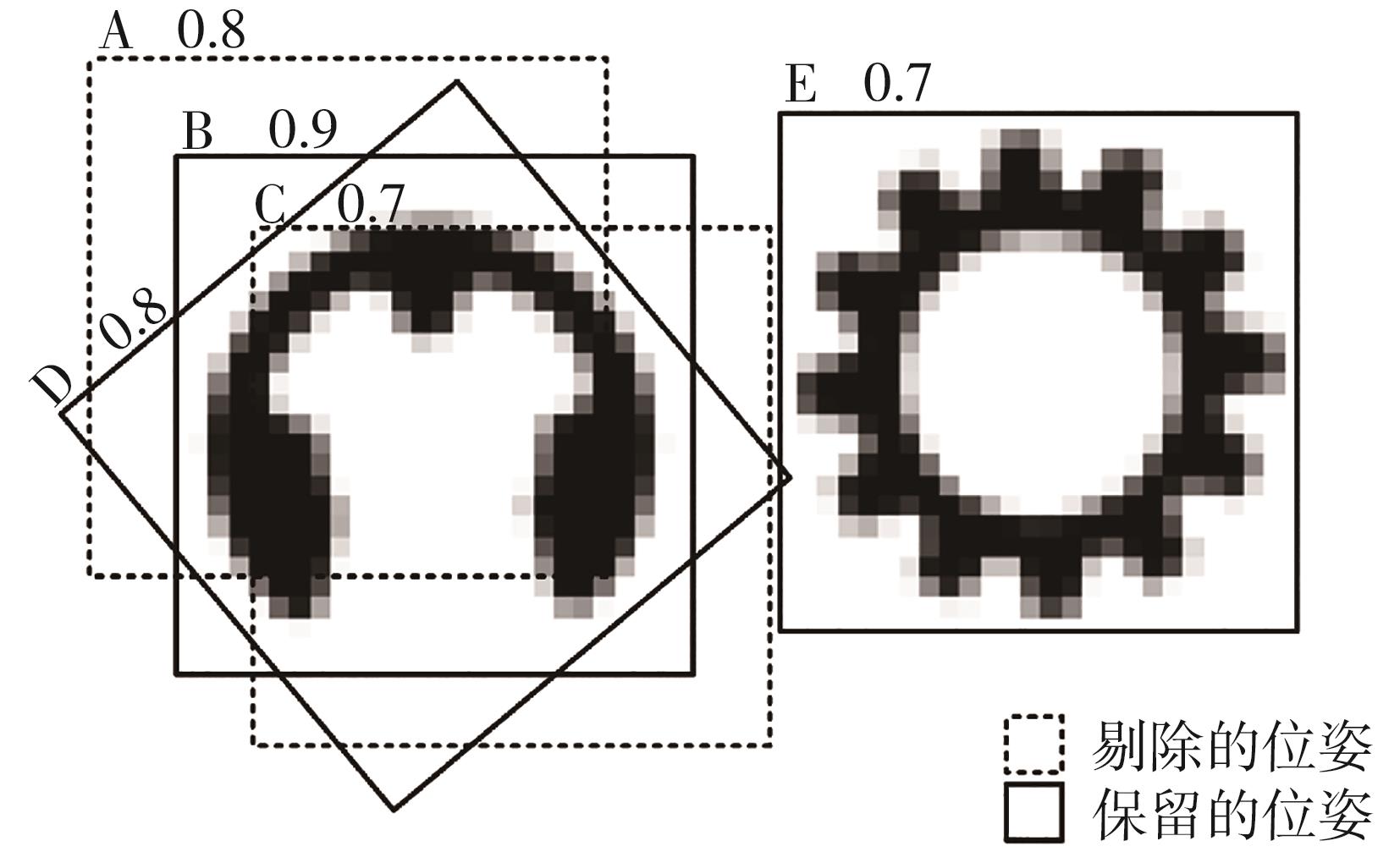
Fig.4
The best edge points under different sparse factors"
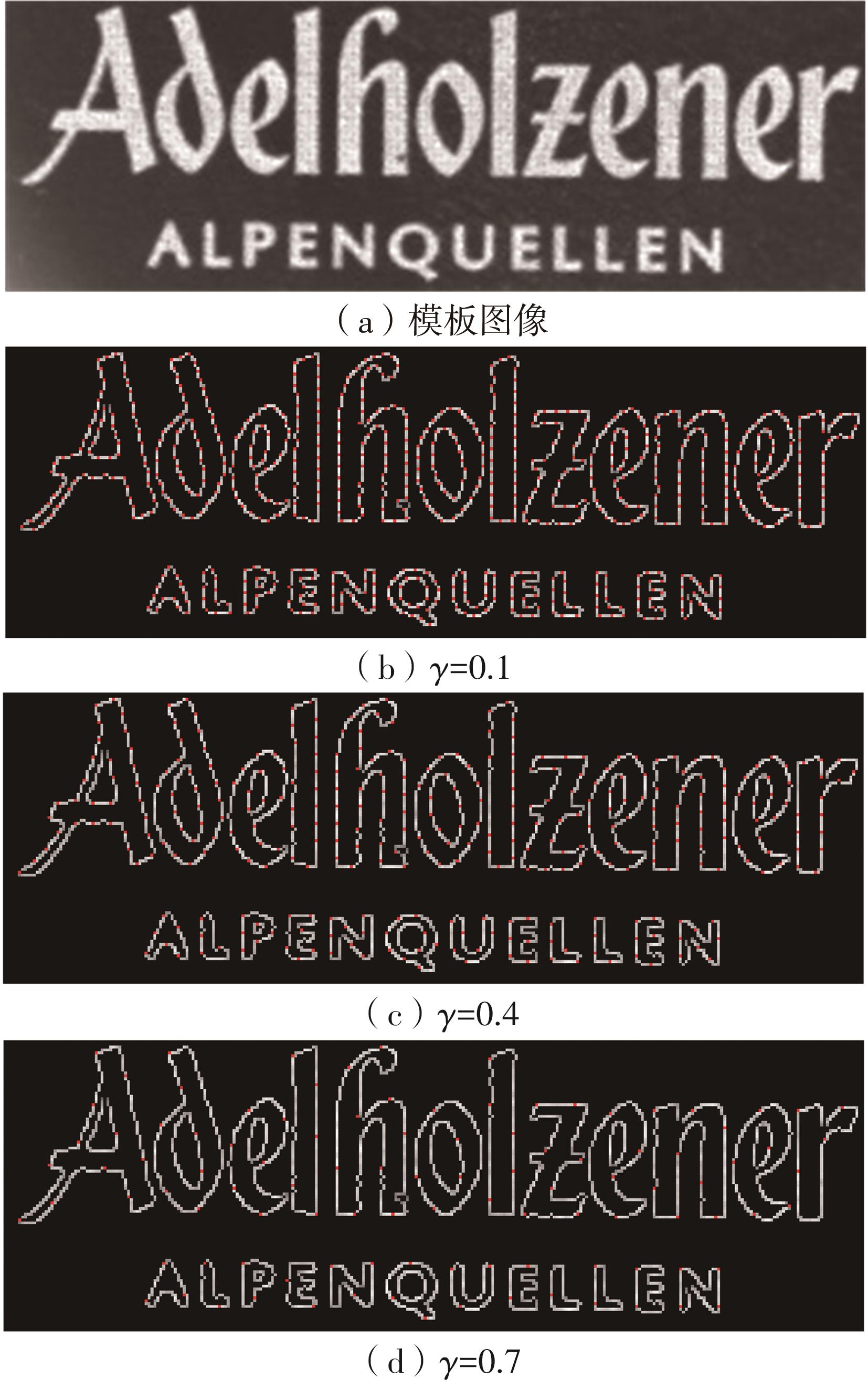
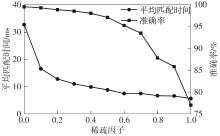
Fig.5
Algorithm performance under different sparse factors"
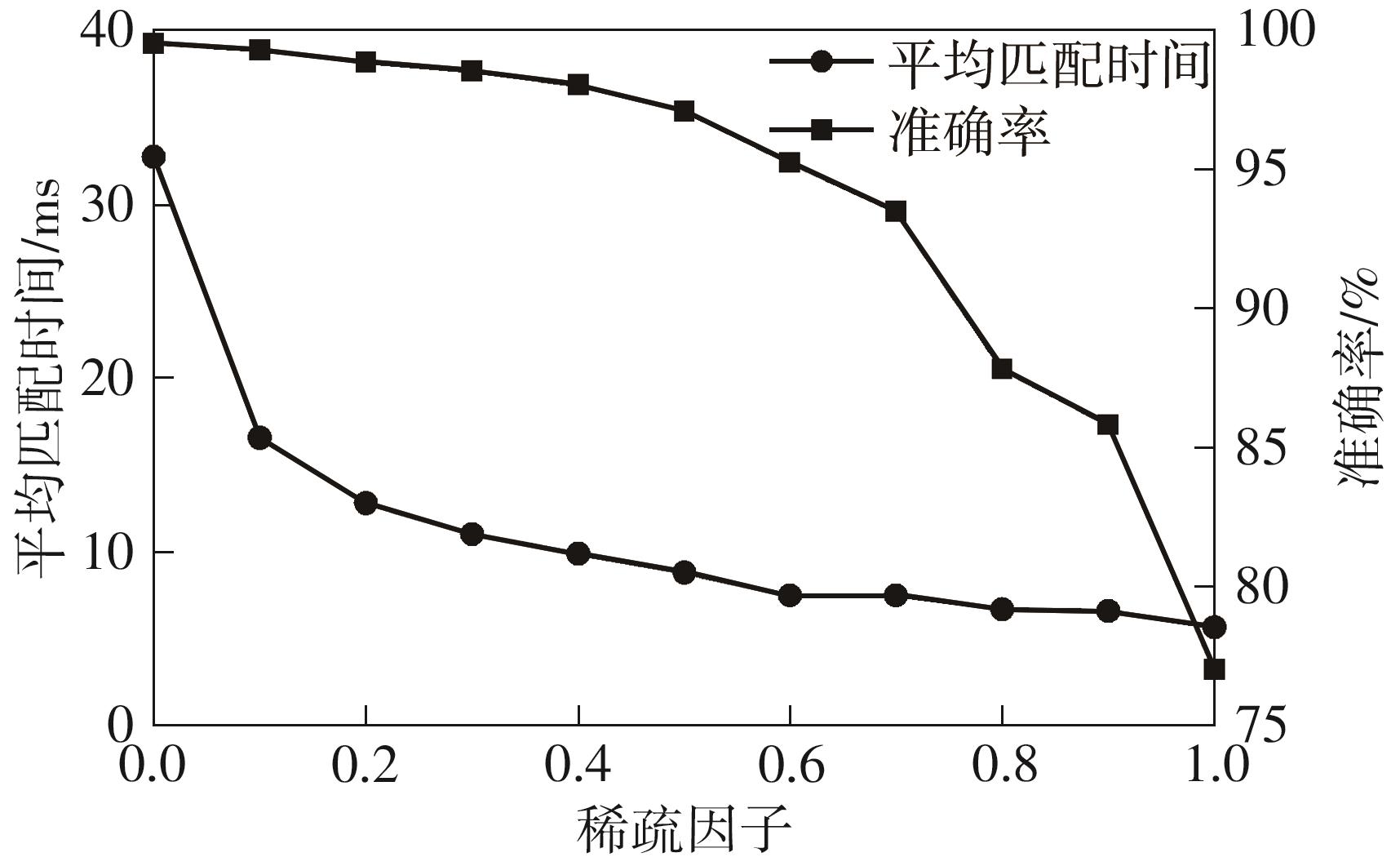

Fig.6
Comparison performance of algorithms with pre-screening and without pre-screening"
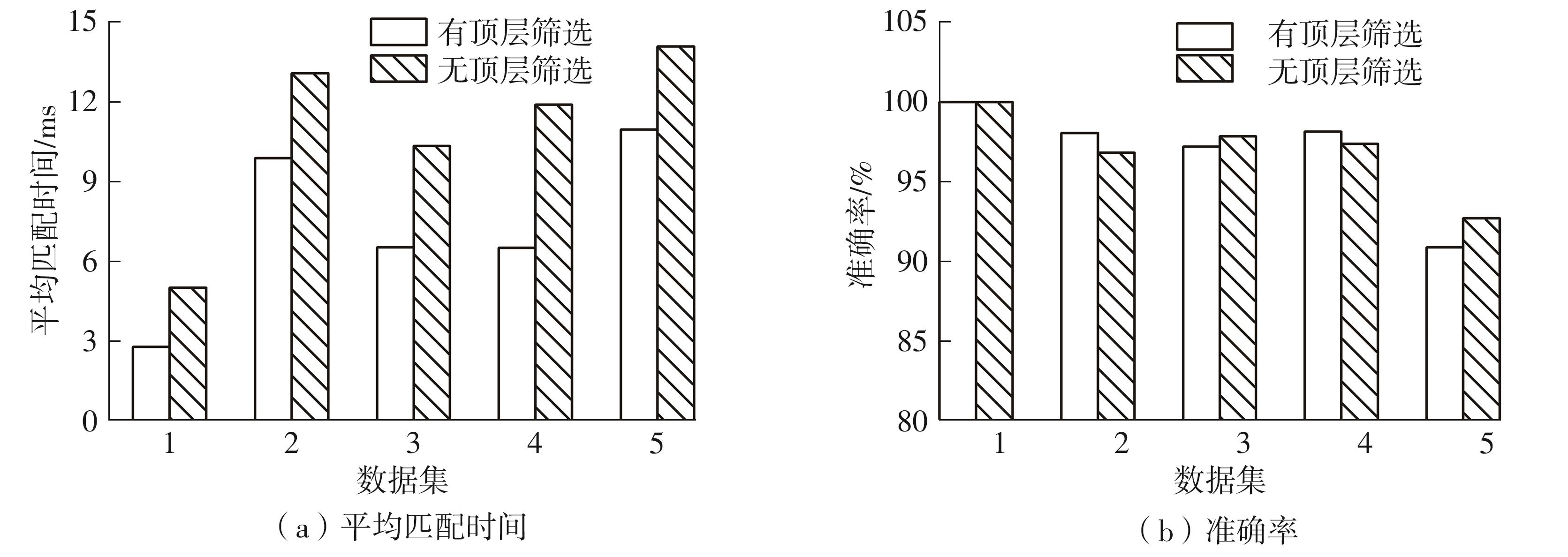
Fig.7
Matching examples of the proposed algorithm for five datasets"
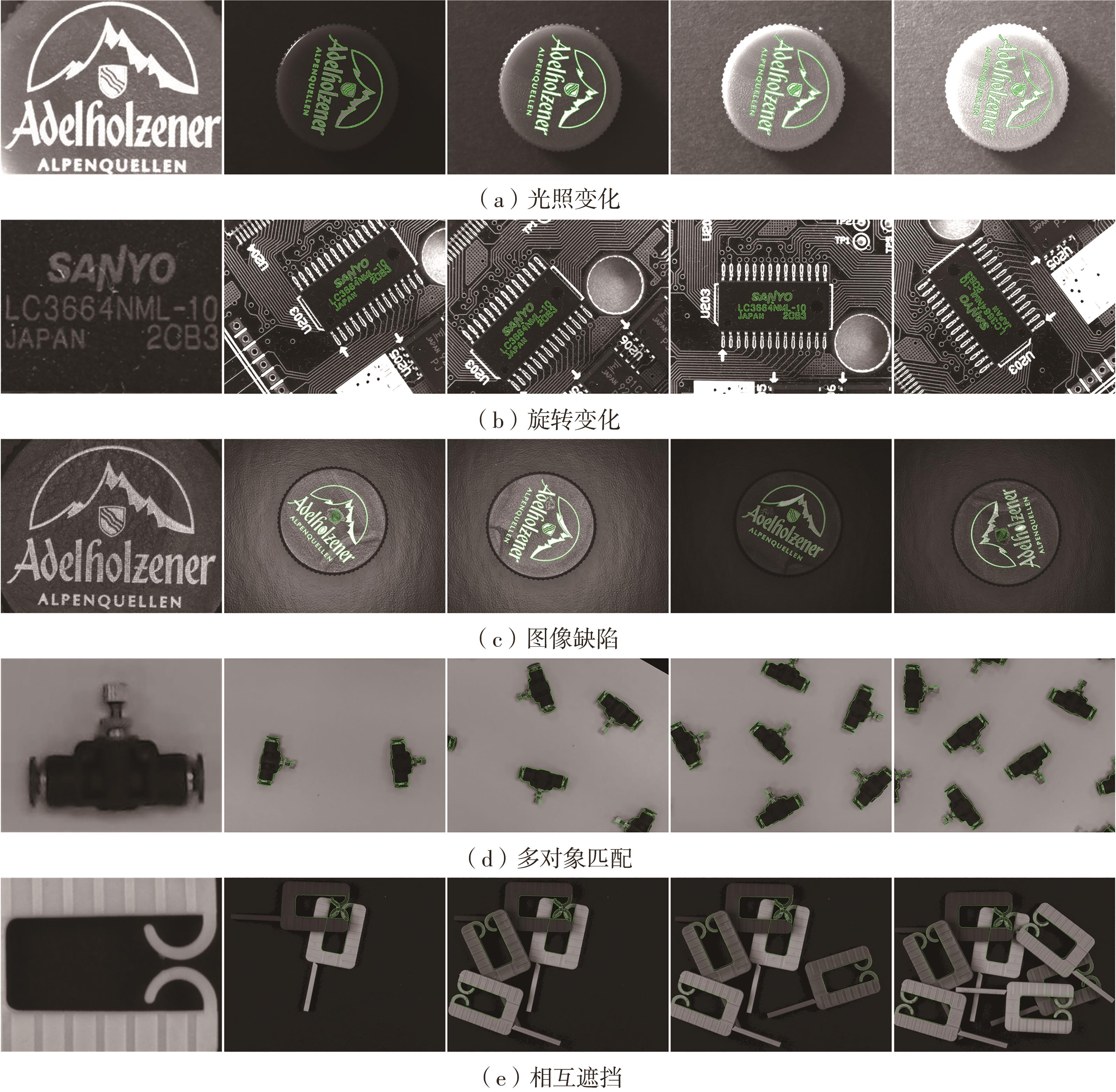
Table 1
Average matching time of five algorithms for five datasets"
| 方法 | 数据集1 | 数据集2 | 数据集3 | 数据集4 | 数据集5 |
|---|---|---|---|---|---|
| 所提模板匹配方法 | 2.79 | 9.88 | 6.53 | 6.51 | 10.96 |
| RPVC | 45.68 | 32.42 | 96.16 | 30.69 | 56.60 |
| LGSC | 1 688.94 | 1 041.77 | 9 311.08 | 345.22 | 223.11 |
| NCC | 592.80 | 314.12 | 895.99 | 3 701.00 | 1 490.00 |
| CCAS | 16.97 | 20.72 | 39.80 | 51.21 | 40.40 |
Table 2
Comparison of accuracy of five algorithms for five datasets"
| 方法 | 数据集1 | 数据集2 | 数据集3 | 数据集4 | 数据集5 |
|---|---|---|---|---|---|
| 所提模板匹配方法 | 100.00 | 98.06 | 97.22 | 98.15 | 90.87 |
| RPVC | 76.24 | 13.33 | 74.07 | 86.11 | 30.16 |
| LGSC | 94.44 | 96.25 | 90.43 | 88.73 | 92.63 |
| NCC | 100.00 | 100.00 | 96.33 | 92.86 | 68.42 |
| CCAS | 99.38 | 99.44 | 95.37 | 94.30 | 82.86 |
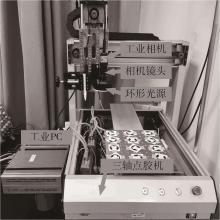
Fig.8
A glue dispenser"
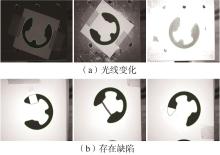
Fig.9
Real-time positioning effect of the proposed template matching method with glue dispenser"
| 1 | MA J, JIANG X, FAN A,et al .Image matching from handcrafted to deep features:A survey[J].International Journal of Computer Vision,2021,129(1):23-79. |
| 2 | QI X, MIAO L .A template matching method for multiscale and rotated images using ring projection vector conversion[C]∥ Proceedings of the 2018 IEEE 3rd International Conference on Image,Vision and Computing (ICIVC).Chongqing:IEEE,2018:45-49. |
| 3 | KAI B,UWE D .Template matching using fast normalized cross correlation[EB/OL].[2022-10-20].. |
| 4 | BAI L, YANG X, GAO H .Corner point-based coarse-fine method for surface-mount component positioning[J].IEEE Transactions on Industrial Informatics,2018,14(3):877-886. |
| 5 | YANG H, ZHENG S, LU J,et al .Polygon-invariant generalized hough transform for high-speed vision-based positioning[J].IEEE Transactions on Automation Science and Engineering,2016,13(3):1367-1384. |
| 6 | DALAL N, TRIGGS B .Histograms of oriented gradients for human detection[C]∥ Proceedings of the 2005 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR’05).San Diego:IEEE,2005:886-893. |
| 7 | JIANG X, XIA Y, ZHANG X,et al .Robust image matching via local graph structure consensus[J].Pattern Recognition,2022,126:108588/1-14. |
| 8 | KE W, ZHANG T, HUANG Z,et al .Multiple anchor learning for visual object detection[C]∥ Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR).Seattle:IEEE,2020:10203-10212. |
| 9 | ULRICH M, FOLLMANN P, NEUDECK J .A comparison of shape-based matching with deep-learning-based object detection[J].tm-Technisches Messen,2019,86(11):685-698. |
| 10 | HINTERSTOISSER S, CAGNIART C, ILIC S,et al .Gradient response maps for real-time detection of textureless objects[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,2012,34(5):876-888. |
| 11 | PENG X .Combine color and shape in real-time detection of texture-less objects[J].Comput Vis Image Underst,2015,135:31-48. |
| 12 | WU Q, XU G, CHENG Y,et al .Histogram of maximal pointedge orientation for multi-source image matching[J].International Journal of Remote Sensing,Taylor & Francis,2020,41(14):5166-5185. |
| 13 | 吴晓军,邹广华 .基于边缘几何特征的高性能模板匹配算法[J].仪器仪表学报,2013,34(7):23-30. |
| WU Xiaojun, ZOU Guanghua .High performance template matching algorithm based on edge geometric features[J].Chinese Journal of Scientific Instrument,2013,34(7):23-30. | |
| 14 | CHAN J, LEE J A, KEMAO Q .BORDER:An oriented rectangles approach to texture-less object recognition [C]∥ Proceedins of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR).Las Vegas:IEEE,2016:2855-2863. |
| 15 | LE T S, LIN C Y .GPU-accelerated image alignment for object detection in industrial applications[C]∥ Proceedins of the 2017 International Conference on Advanced Robotics and Intelligent Systems (ARIS).Taipei:IEEE,2017:13-16. |
| 16 | TSAI C, YU C .Real-time textureless object detection and recognition based on an edge-based hierarchical template matching algorithm[J].Journal of Applied Science and Engineering,2018,21(2):229-240. |
| 17 | 王凯,余振军,何显辉,等 .改进的多尺度形状模板匹配算法[J].激光杂志,2022,43(4):82-87. |
| WANG Kai, YU Zhenjun, HE Xianhui,et al .Improved multi-scale shape template matching algorithm[J].Laser Journal,2022,43(4):82-87. | |
| 18 | ZHANG T, WEI S, JI S .E2EC:an end-to-end contour-based method for high-quality high-speed instance segmentation[C]∥ Proceedins of the 2022 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR).New Orleans:IEEE,2022:4433-4442. |
| 19 | 李华强,喻擎苍,方玫 .Canny算子中Otsu阈值分割法的运用[J].计算机工程与设计,2008(9):2297-2299. |
| LI Huaqiang, YU Qingcang, FANG Mei .Application of Otsu thresholding method on Canny operator [J].Computer Engineering and Design,2008(9):2297-2299. | |
| 20 | HOFHAUSER A, STEGER C, NAVAB N .Edge-based template matching with a harmonic deformation model[C]∥ RANCHORDAS A,ARAÚJO H J,PEREIRA J M,et al.Proceedings of the International Conference on Computer Vision and Computer Graphics.Berlin,Heidelberg:Springer,2009:176-187. |
| 21 | BÖTTGER T, STEGER C .Accurate and robust tracking of rigid objects in real time[J].Journal of Real-Time Image Processing,2021,18(3):493-510. |
| 22 | YU X, FEI X .Target image matching algorithm based on pyramid model and higher moments[J].Journal of Computational Science,2017,21:189-194. |
| 23 | CUI X, KIM H, PARK E,et al .Robust and accurate pattern matching in fuzzy space for fiducial mark alignment[J].Machine Vision and Applications,2013,24(3):447-459. |
| [1] | XIA Yimin, MA Jiesong, ZHANG Yazhou, et al. Bolting Jumbo Boom Positioning Based on Compliance Error Detection [J]. Journal of South China University of Technology (Natural Science Edition), 2020, 48(3): 83-90. |
| [2] | ZHENG Sifan, WANG Weixing, HE Zhanhua, et al. Research on Swing Amplitude Detection of Automobile Wiper with Two Granularity Optical Flow Manifold Learning#br# [J]. Journal of South China University of Technology (Natural Science Edition), 2020, 48(1): 123-132. |
| [3] |
KUANG Yongcong LI Jiayu LIANG Jinglun OUYANG Gaofei.
Precise Positioning Method of Electronic-Component Leads Based on Rotational Stereo Vision
|
| [4] | LIU Jian-guo YU Li LIU Si-jian WANG Shuai-shuai. Stereo Matching Algorithm Based on Improved Census Transform and Multi-Scale Space [J]. Journal of South China University of Technology (Natural Science Edition), 2017, 45(12): 43-49. |
| [5] | Guo Ling Li Zhen-zhen Du Ming-hui. Moving Target Tracking Based on Monocular Sequence Images [J]. Journal of South China University of Technology(Natural Science Edition), 2012, 40(3): 94-99. |
| [6] | Zhang Qian Pei Hai-long Shi Bu-hai Zhao Yun-ji. Design of Machine Vision System to Detect Surface Stains of Non-Woven Fabric Products [J]. Journal of South China University of Technology(Natural Science Edition), 2012, 40(3): 81-87. |
| [7] | Sun Da-Wen Wu Di He Hong-ju Feng Yao-ze. Applications of Modern Optical Imaging Technologies for Rapid Quality Inspection of Food Products [J]. Journal of South China University of Technology(Natural Science Edition), 2012, 40(10): 59-68. |
| [8] | Quan Yan-ming Li Shu-mei. Fast Image Mosaic Method for Large-Scale Workpiece Measurement System [J]. Journal of South China University of Technology (Natural Science Edition), 2011, 39(8): 60-65. |
| [9] | Lei Jing-fa Wang De-hui Yuan Zhong-fan. A Measurement Method of Plane Angle Based on Machine Vision [J]. Journal of South China University of Technology (Natural Science Edition), 2011, 39(8): 54-59. |
| [10] | Wu Xiao. Self-Localization of Soccer Robot Based on Improved Genetic Algorithm [J]. Journal of South China University of Technology (Natural Science Edition), 2011, 39(6): 58-64. |
| [11] | Huang Chen-hua Xie Cun-xi Zhang Tie. Edge Detection Algorithm Based on Grey-Model Whitening Response [J]. Journal of South China University of Technology (Natural Science Edition), 2008, 36(8): 33-36,53. |
| [12] | Lu Sheng-lin Zhang Xian-min Kuang Yong-cong. Neural Network-Based Inspecting Method of PCB Solder Joint [J]. Journal of South China University of Technology (Natural Science Edition), 2008, 36(5): 135-139. |
| [13] | Liang Zhong-wei Ye Bαng-yan Peng Rui-tao Xu Lan-ying. Image-Splicing Technology for IC Chip Inspection Based on Direction-Predicting Operator of Grading 8 Neighborhoods [J]. Journal of South China University of Technology (Natural Science Edition), 2007, 35(12): 56-60. |
| [14] | Yang Duan-duan Jin Lian-wen Yin Jun-xun. Fingertip Detection Approach for Finger-Writing ChineseCharacter Recognition System [J]. Journal of South China University of Technology (Natural Science Edition), 2007, 35(1): 58-63. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||