Journal of South China University of Technology(Natural Science Edition) ›› 2026, Vol. 54 ›› Issue (2): 62-76.doi: 10.12141/j.issn.1000-565X.250181
• Computer Science & Technology • Previous Articles Next Articles
A Long-Range Lane Detection Method with Enhanced Spatial Perception
WANG Yaoqi, LU Yaqi, WANG Xiaopeng
- School of Electronic and Information Engineering,Lanzhou Jiaotong University,Lanzhou 730070,Gansu,China
-
Received:2025-06-20Online:2026-02-25Published:2025-09-26 -
Contact:卢亚琦(1999—),男,硕士生,主要从事计算机视觉、图像信息处理研究。 E-mail:yaqlu0413@163.com -
About author:王耀琦(1976—),男,硕士,副教授,主要从事多媒体信息处理、嵌入式系统设计研究。E-mail: wangyaoqi@ mail.lzjtu.cn -
Supported by:the Science and Technology Plan Project of Gansu Province(25CXGA031)
CLC Number:
Cite this article
WANG Yaoqi, LU Yaqi, WANG Xiaopeng. A Long-Range Lane Detection Method with Enhanced Spatial Perception[J]. Journal of South China University of Technology(Natural Science Edition), 2026, 54(2): 62-76.
share this article

Fig.1
Schematic diagram of overall network architecture"
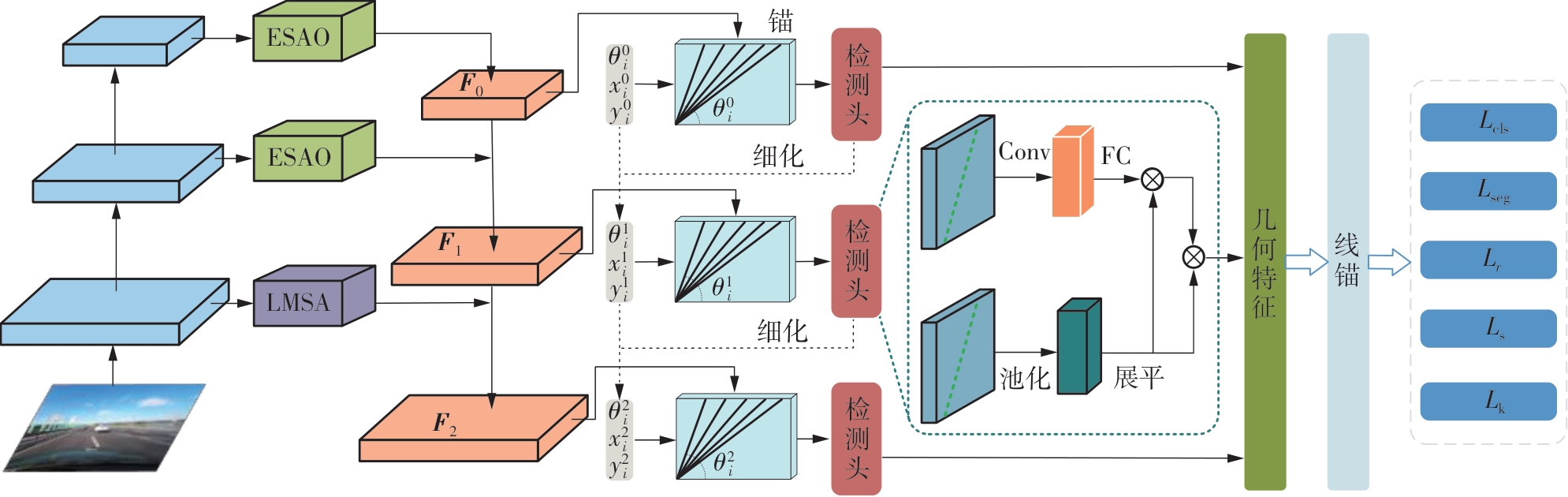

Fig.2
Schematic diagram of SPM structure"
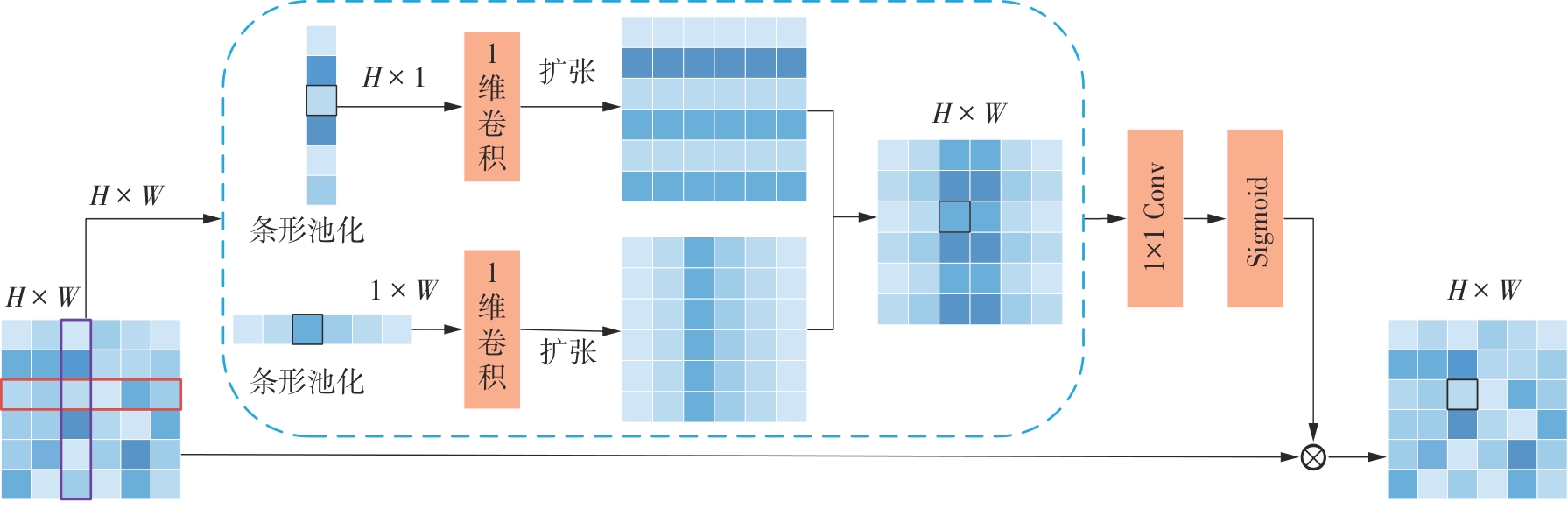

Fig.3
Schematic diagram of SPM block structure"

Fig.4
Schematic diagram of ESAO structure"
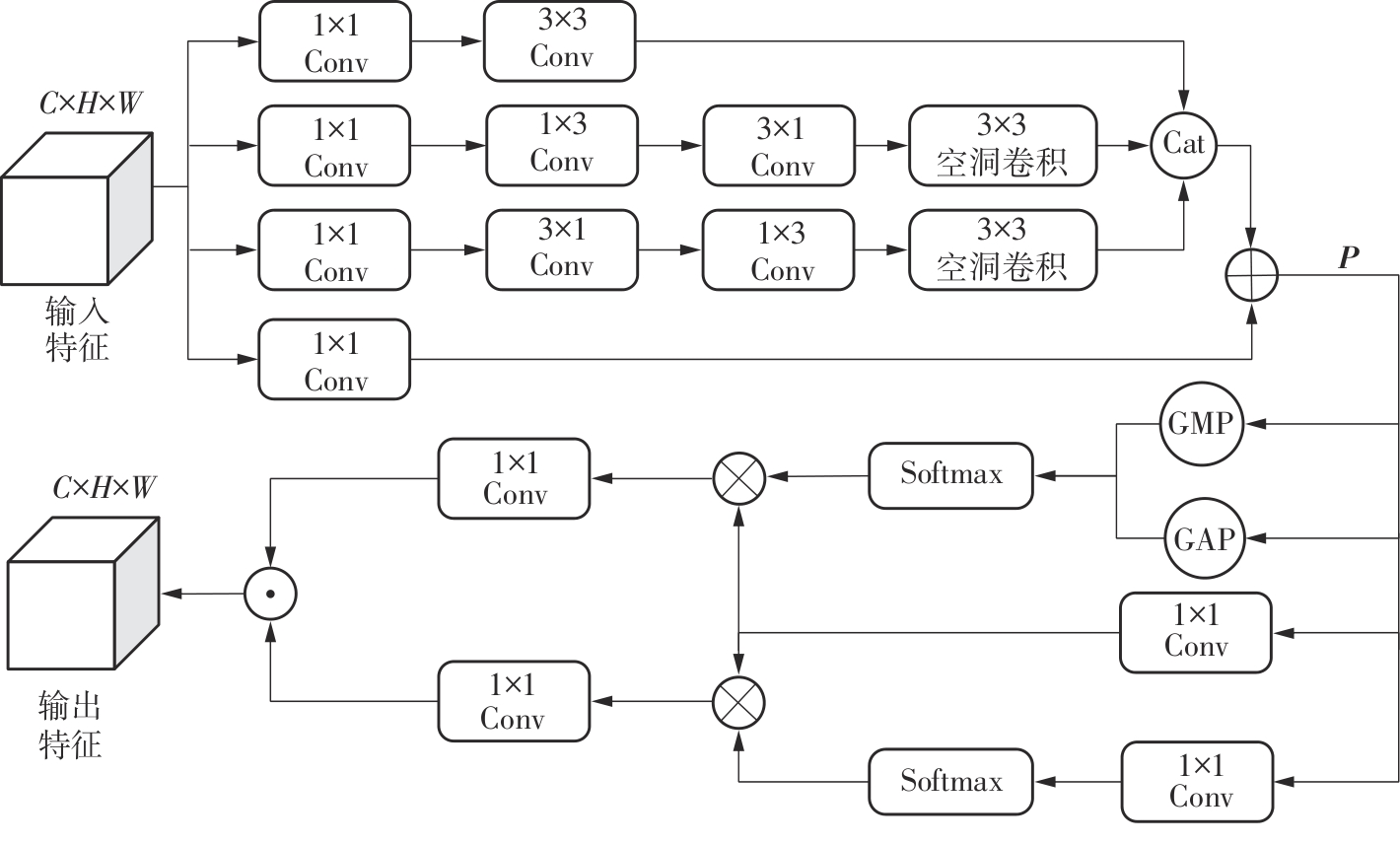

Fig.5
Schematic diagram of LMSA structure"
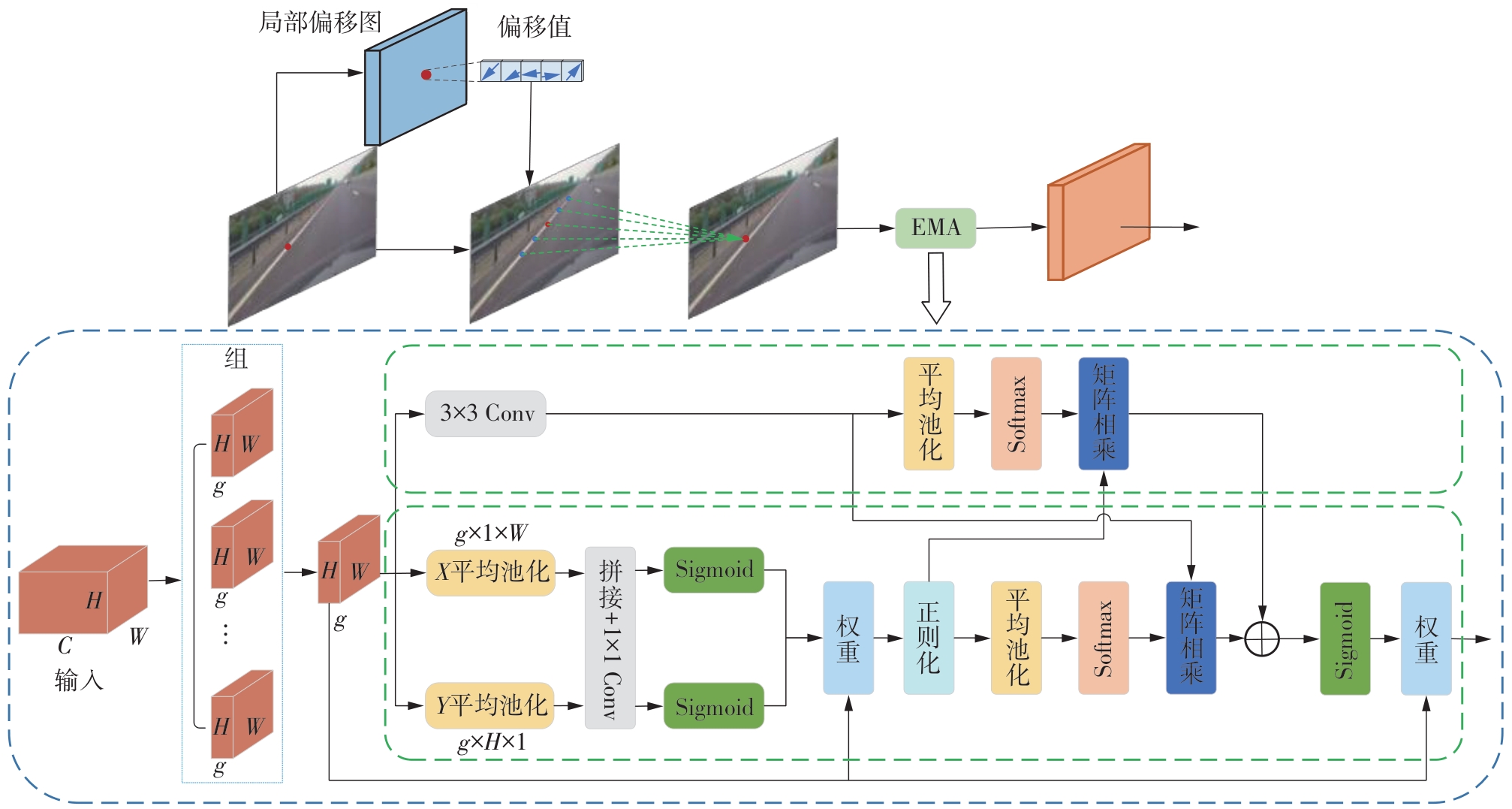
Table 1
Detailed information of three datasets"
| 数据集 | 训练集 | 验证集 | 测试集 | 分辨率 | 道路类别 |
|---|---|---|---|---|---|
| CULane | 88 880 | 9 675 | 34 680 | 1 460 × 590 | 郊区、城市、高速 |
| TuSimple | 3 268 | 358 | 2 782 | 1 280 × 720 | 高速公路 |
| CurveLanes | 100 000 | 20 000 | 30 000 | 2 560 × 1 440 | 城市、高速 |
Fig.6
Scenario distribution of the test set in CULane dataset"
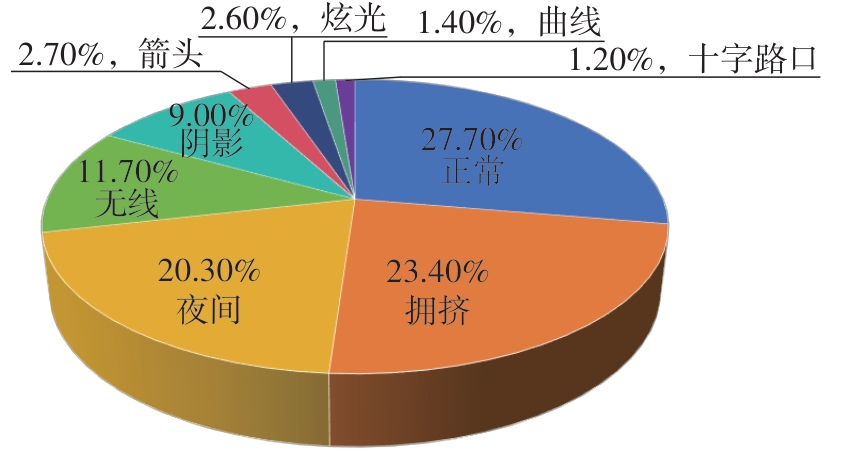
Table 2
Experimental results of different methods on CULane dataset"
| 方法 | 主干网络 | F1@50/% | F1@75/% | Fm1/% | F1@50/% | FPS | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 正常 | 拥挤 | 炫光 | 阴影 | 无线 | 箭头 | 曲线 | 十字路口 | 夜间 | ||||||
| SCNN | VGG16 | 71.60 | 39.84 | 38.84 | 90.60 | 69.70 | 58.50 | 66.90 | 43.40 | 84.10 | 64.40 | 1 990 | 66.10 | 7.5 |
| RESA | ResNet34 | 74.50 | 91.90 | 72.40 | 66.50 | 72.00 | 46.30 | 88.10 | 68.60 | 1 896 | 69.80 | 45.5 | ||
| RESA | ResNet50 | 75.30 | 53.39 | 47.86 | 92.10 | 73.10 | 72.00 | 72.80 | 47.70 | 88.30 | 70.30 | 1 503 | 69.90 | 35.7 |
| UFLD | ResNet18 | 68.40 | 40.01 | 38.94 | 87.70 | 66.00 | 58.40 | 62.80 | 40.20 | 81.00 | 57.90 | 1 743 | 62.10 | 282.0 |
| UFLD | ResNet34 | 72.30 | 90.70 | 70.20 | 59.50 | 69.30 | 44.40 | 85.70 | 69.50 | 2 037 | 66.70 | 170.0 | ||
| LaneATT | ResNet18 | 75.13 | 51.29 | 47.35 | 91.17 | 72.71 | 65.82 | 68.03 | 49.13 | 87.82 | 63.75 | 1 020 | 68.58 | 153.0 |
| LaneATT | ResNet34 | 76.68 | 54.34 | 49.57 | 92.14 | 75.03 | 66.47 | 78.15 | 49.39 | 88.38 | 67.72 | 1 330 | 70.72 | 129.0 |
| LaneATT | ResNet122 | 77.02 | 57.50 | 51.48 | 91.74 | 76.16 | 69.47 | 76.31 | 50.46 | 86.29 | 64.05 | 1 264 | 70.81 | 30.0 |
| GANet | ResNet18 | 77.79 | 57.35 | 52.10 | 92.24 | 77.16 | 71.24 | 77.88 | 53.59 | 89.62 | 73.92 | 1 240 | 72.75 | 153.0 |
| GANet | ResNet34 | 78.39 | 58.62 | 53.36 | 92.73 | 77.92 | 71.64 | 79.49 | 52.63 | 90.37 | 74.32 | 1 368 | 73.67 | 127.0 |
| GANet | ResNet101 | 78.63 | 58.96 | 54.71 | 92.67 | 78.66 | 71.82 | 78.32 | 53.38 | 89.86 | 75.37 | 1 352 | 73.85 | 63.0 |
| CondLane | ResNet18 | 78.14 | 57.42 | 51.84 | 91.87 | 75.79 | 70.72 | 80.01 | 52.39 | 89.37 | 72.40 | 1 364 | 73.23 | 173.0 |
| CondLane | ResNet34 | 78.74 | 59.39 | 53.11 | 92.18 | 77.14 | 71.17 | 79.93 | 51.85 | 89.89 | 73.88 | 1 387 | 73.92 | 128.0 |
| CondLane | ResNet101 | 79.28 | 61.13 | 54.83 | 92.47 | 77.44 | 70.93 | 80.91 | 53.13 | 90.16 | 75.21 | 1 201 | 74.80 | 47.0 |
| CLRNet | ResNet18 | 78.58 | 61.21 | 55.23 | 92.30 | 78.33 | 72.71 | 79.66 | 53.14 | 90.25 | 71.56 | 1 321 | 75.11 | 160.0 |
| CLRNet | ResNet34 | 78.93 | 61.11 | 55.14 | 92.49 | 78.06 | 73.27 | 79.92 | 54.01 | 90.59 | 72.77 | 1 213 | 75.02 | 125.0 |
| CLRNet | ResNet101 | 79.35 | 61.96 | 55.55 | 92.85 | 78.78 | 71.49 | 82.33 | 54.50 | 89.79 | 74.57 | 1 262 | 75.51 | 53.0 |
| CLRerNet | ResNet34 | 79.76 | 62.77 | 55.29 | 92.93 | 78.51 | 72.88 | 82.66 | 54.55 | 90.87 | 74.45 | 1 088 | 76.02 | 180.0 |
| CLRerNet | ResNet101 | 79.91 | 63.30 | 55.62 | 91.91 | 78.03 | 71.98 | 82.12 | 53.73 | 90.53 | 73.83 | 1 113 | 76.13 | 54.0 |
| E-CLRNet | ResNet18 | 79.87 | 62.59 | 55.35 | 93.65 | 78.28 | 74.81 | 80.95 | 53.84 | 90.47 | 74.26 | 1 198 | 75.16 | 147.0 |
| 文中方法 | ResNet18 | 79.98 | 63.19 | 56.13 | 93.85 | 78.48 | 74.98 | 81.95 | 53.65 | 90.37 | 77.26 | 1 298 | 76.76 | 148.0 |
| 文中方法 | ResNet34 | 80.47 | 62.87 | 56.04 | 93.92 | 78.73 | 76.03 | 82.41 | 54.79 | 90.91 | 77.91 | 1 172 | 76.44 | 128.0 |
| 文中方法 | ResNet101 | 81.05 | 64.07 | 57.28 | 94.19 | 79.31 | 74.46 | 84.53 | 55.92 | 90.56 | 79.64 | 1 223 | 77.12 | 47.0 |
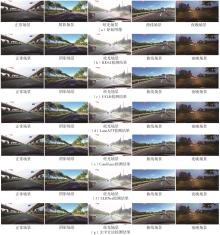
Fig.7
Visual detection results of six methods on CULane dataset"
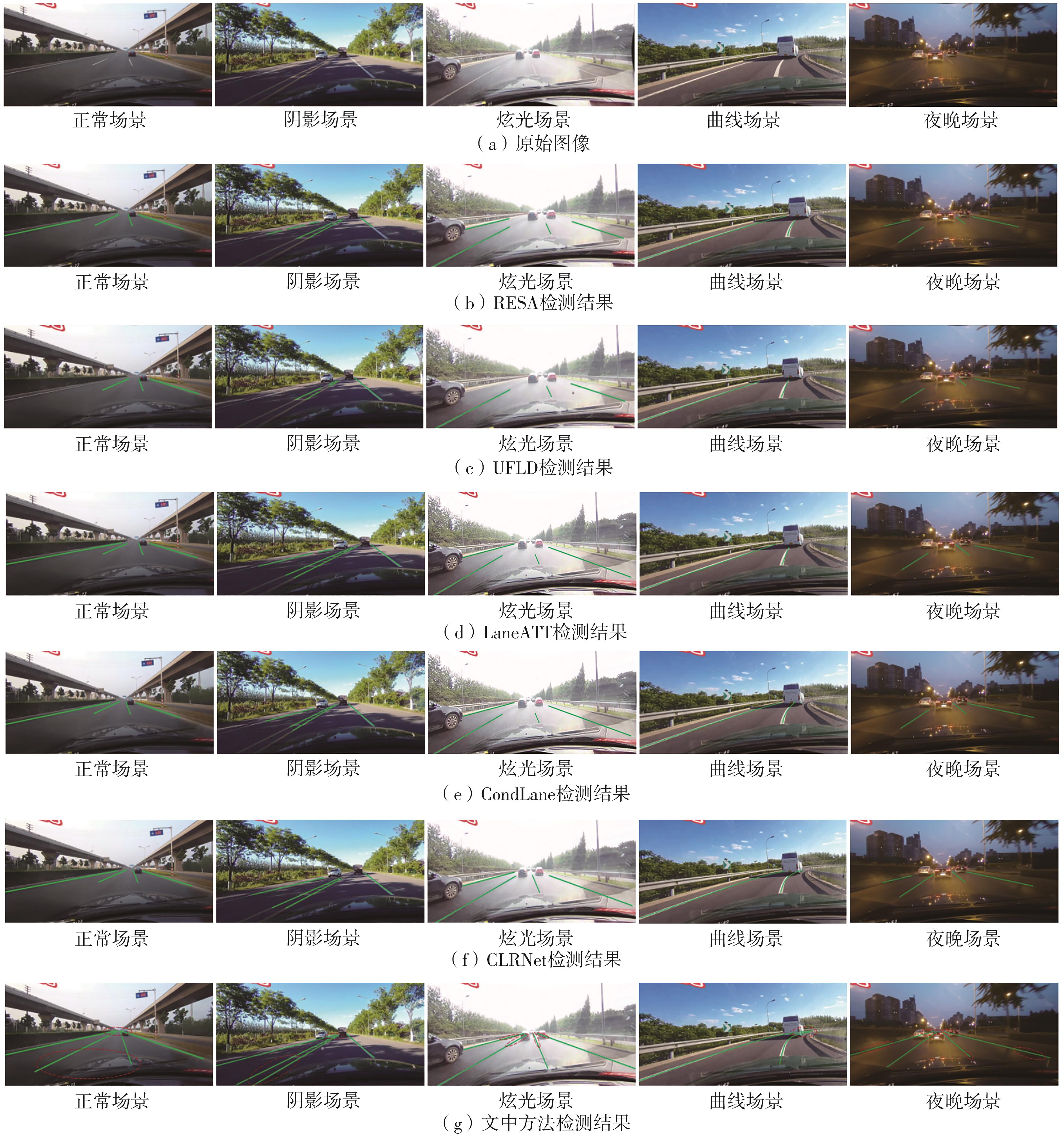
Table 3
Experimental results of different methods on TuSimple dataset"
| 方法 | 主干网络 | F1/% | Acc/% | RFP/% | RFN/% | 方法 | 主干网络 | F1/% | Acc/% | RFP/% | RFN/% | ||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| SCNN | VGG16 | 95.97 | 96.53 | 6.17 | 1.80 | CondLane | ResNet18 | 97.01 | 95.48 | 2.18 | 3.80 | ||
| RESA | ResNet34 | 96.93 | 96.82 | 3.63 | 2.48 | CondLane | ResNet34 | 96.98 | 95.37 | 2.20 | 3.82 | ||
| UFLD | ResNet18 | 87.87 | 95.82 | 19.05 | 3.92 | CondLane | ResNet101 | 97.24 | 96.54 | 2.01 | 3.50 | ||
| UFLD | ResNet34 | 88.02 | 95.86 | 18.91 | 3.75 | CLRNet | ResNet18 | 97.39 | 96.54 | 2.28 | 1.96 | ||
| LaneATT | ResNet18 | 96.71 | 95.57 | 3.56 | 3.01 | CLRNet | ResNet34 | 97.32 | 96.57 | 2.27 | 2.08 | ||
| LaneATT | ResNet34 | 96.77 | 95.63 | 3.53 | 2.92 | CLRNet | ResNet101 | 97.12 | 96.53 | 2.37 | 2.38 | ||
| LaneATT | ResNet122 | 96.06 | 96.10 | 5.64 | 2.17 | 文中方法 | ResNet18 | 97.97 | 96.97 | 2.11 | 2.04 | ||
| GANet | ResNet18 | 97.21 | 95.95 | 2.97 | 2.62 | 文中方法 | ResNet34 | 97.73 | 97.01 | 1.98 | 2.19 | ||
| GANet | ResNet34 | 97.18 | 95.87 | 2.99 | 2.64 | 文中方法 | ResNet101 | 97.54 | 96.87 | 2.46 | 2.42 | ||
| GANet | ResNet101 | 96.95 | 96.44 | 2.63 | 2.47 | ||||||||

Fig.8
Visual detection results of four methods on TuSimple dataset"
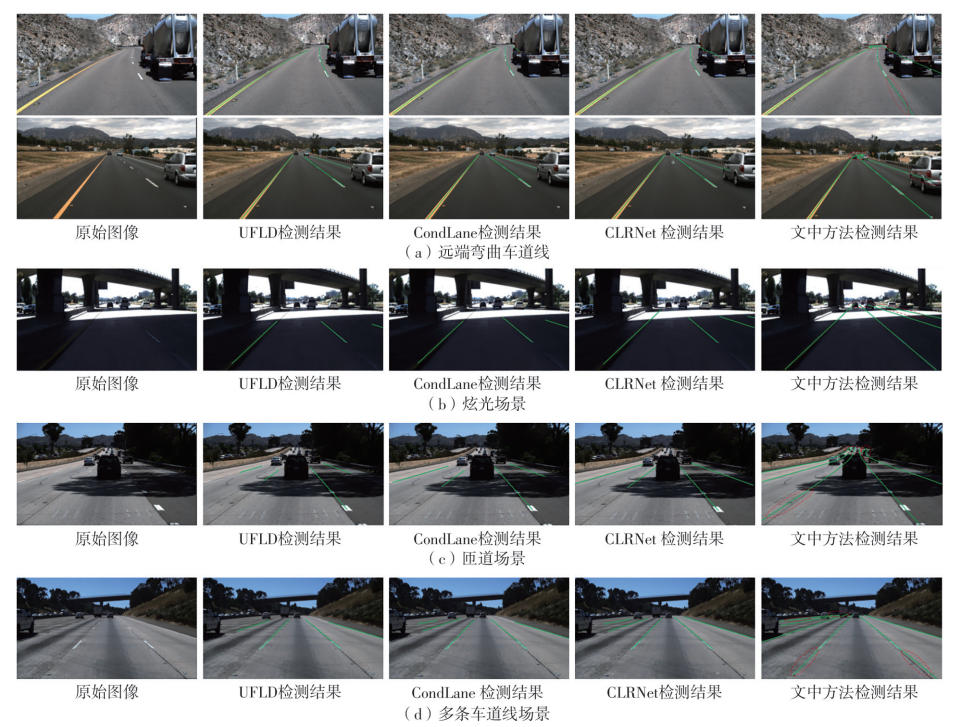
Table 4
Experimental results of different methods on Curve-Lanes dataset"
| 方法 | 主干网络 | F1@50/% | F1@75/% | Fm1/% | P/% | R/% | FPS |
|---|---|---|---|---|---|---|---|
| SCNN | VGG16 | 65.02 | 76.13 | 56.74 | 8 | ||
| UFLDv2 | ResNet18 | 80.45 | 54.23 | 49.06 | 81.49 | 79.44 | 79 |
| UFLDv2 | ResNet34 | 81.34 | 56.49 | 50.48 | 81.93 | 80.76 | 46 |
| CondLane | ResNet18 | 85.09 | 59.04 | 52.50 | 87.75 | 82.58 | 123 |
| CondLane | ResNet34 | 85.92 | 61.07 | 53.76 | 88.29 | 83.68 | 87 |
| CondLane | ResNet101 | 86.10 | 65.26 | 57.10 | 88.98 | 83.41 | 38 |
| 文中方法 | ResNet18 | 87.26 | 68.27 | 59.01 | 90.32 | 84.58 | 143 |
| 文中方法 | ResNet34 | 87.58 | 68.59 | 59.42 | 90.36 | 85.17 | 112 |
| 文中方法 | ResNet101 | 87.83 | 69.60 | 59.98 | 90.74 | 85.22 | 46 |

Fig.9
Visual detection results of three methods on CurveLanes dataset"
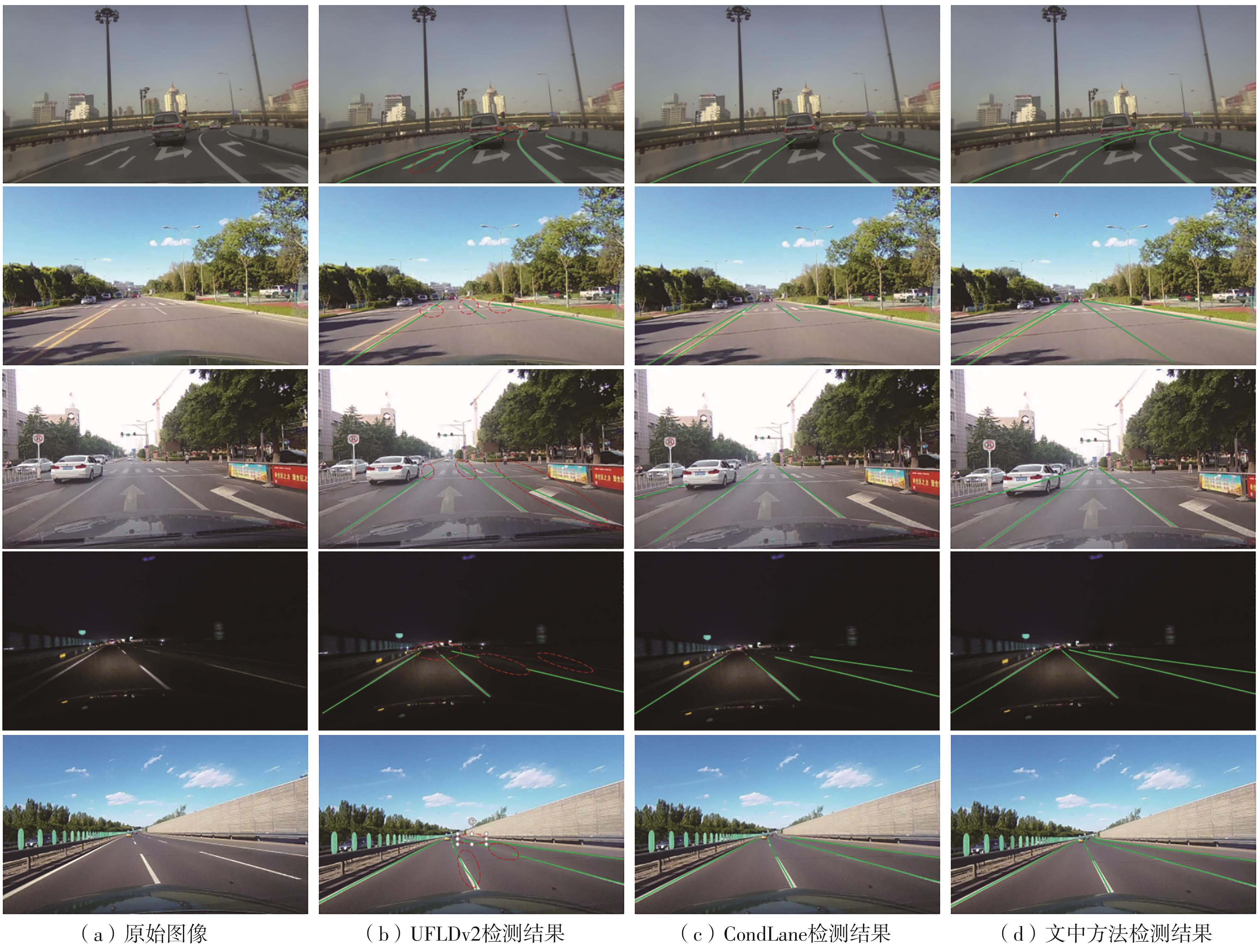
Table 5
Results of the ablation experiments"
| ResNet18 | SPM | ESAO | LMSA | KLoss | F1@50/% | F1@75/% |
|---|---|---|---|---|---|---|
| √ | 78.58 | 61.21 | ||||
| √ | √ | 78.82 | 61.45 | |||
| √ | √ | 78.85 | 61.51 | |||
| √ | √ | 78.89 | 61.44 | |||
| √ | √ | 78.75 | 61.29 | |||
| √ | √ | √ | 79.21 | 61.87 | ||
| √ | √ | √ | √ | 79.66 | 62.18 | |
| √ | √ | √ | √ | √ | 79.98 | 63.19 |
| [1] | GUO J, HARMATI I .Lane-changing decision modelling in congested traffic with a game theory-based decomposition algorithm[J].Engineering Applications of Artificial Intelligence,2022,107:104530/1-20. |
| [2] | WU Y, ZHAO L, LU J,et al .Dense hybrid proposal modulation for lane detection[J].IEEE Transactions on Circuits and Systems for Video Technology,2023,33(11):6845-6859. |
| [3] | DAI W, LI Z, XU X,et al .Enhanced cross layer refinement network for robust lane detection across diverse lighting and road conditions[J].Engineering Applications of Artificial Intelligence,2025,139:109473/1-11. |
| [4] | SANG I C, NORRIS W R .Improved generalizability of CNN based lane detection in challenging weather using adaptive preprocessing parameter tuning[J].Expert Systems with Applications,2025,275:127055/1-9. |
| [5] | QI W Q, ZHAO G Y, MA F L,et al .CLRKDNet:speeding up lane detection with knowledge distillation[EB/OL].(2024-05-21)[2025-05-22]. . |
| [6] | PAN X, SHI J, LUO P,et al .Spatial as deep:spatial CNN for traffic scene understanding[C]∥ Proceedings of the 32nd AAAI Conference on Artificial Intelligence.New Orleans:AAAI,2018:7276-7283. |
| [7] | ZHENG T, FANG H, ZHANG Y,et al .RESA:recurrent feature-shift aggregator for lane detection[C]∥ Proceedings of the 35th AAAI Conference on Artificial Intelligence.Palo Alto:AAAI,2021:3547-3554. |
| [8] | LIU R, YUAN Z, LIU T,et al .End-to-end lane shape prediction with transformers[C]∥ Proceedings of 2021 IEEE Winter Conference on Applications of Computer Vision.Waikoloa:IEEE,2021:3693-3701. |
| [9] | WANG J, MA Y, HUANG S,et al .A keypoint-based global association network for lane detection[C]∥ Proceedings of 2022 IEEE/CVF Conference on Computer Vision and Pattern Recognition.New Orleans:IEEE,2022:1382-1391. |
| [10] | ZHENG T, HUANG Y, LIU Y,et al .CLRNetV2:a faster and stronger lane detector[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,2025,47(6):4271-4284. |
| [11] | TABELINI L, BERRIEL R, PAIXAO T M,et al .Keep your eyes on the lane:real-time attention-guided lane detection[C]∥ Proceedings of 2021 IEEE/CVF Conference on Computer Vision and Pattern Recognition.Nashville:IEEE,2021:294-302. |
| [12] | QIN Z, WANG H, LI X .Ultra fast structure-aware deep lane detection[C]∥ Proceedings the 16th European Conference on Computer Vision.Glasgow:Springer,2020:276-291. |
| [13] | 岳永恒,赵志浩 .基于深度学习的车道线检测算法[J].华南理工大学学报(自然科学版),2025,53(9):22-30. |
| YUE Yongheng, ZHAO Zhihao .Lane line detection algorithm based on deep learning[J].Journal of South China University of Technology(Natural Science Edition),2025,53(9):22-30. | |
| [14] | ZHENG T, HUANG Y, LIU Y,et al .CLRNet:cross layer refinement network for lane detection[C]∥ Proceedings of 2022 IEEE/CVF Conference on Computer Vision and Pattern Recognition.New Orleans:IEEE,2022:898-907. |
| [15] | DING Z, DENG Y, LI C,et al .Lane detection via disentangled representation network with slope consistency loss[J].Engineering Applications of Artificial Intelligence,2024,138:109449/1-12. |
| [16] | Tusimple .Tusimple lane detection benchmark[EB/OL].(2020-10-07)[2025-05-20].. |
| [17] | HE K, ZHANG X, REN S,et al .Deep residual learning for image recognition[C]∥ Proceedings of 2016 IEEE Conference on Computer Vision and Pattern Recognition.Las Vegas:IEEE,2016:770-778. |
| [18] | KAO Y, CHE S, ZHOU S,et al .LHFFNet:a hybrid feature fusion method for lane detection[J].Scientific Reports,2024,14:16353/1-17. |
| [19] | HOU Q, ZHANG L, CHENG M M,et al .Strip poo-ling:rethinking spatial pooling for scene parsing[C]∥ Proceedings of 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition.Seattle:IEEE,2020:4003-4012. |
| [20] | CAO Y, XU J, LIN S,et al .GCNet:non-local networks meet squeeze-excitation networks and beyond[C]∥ Proceedings of 2019 IEEE/CVF International Conference on Computer Vision Workshops.Seoul:IEEE,2019:1971-1980. |
| [21] | HU J, SHEN L, SUN G .Squeeze-and-excitation networks[C]∥ Proceedings of 2018 IEEE Conference on Computer Vision and Pattern Recognition.Salt Lake City:IEEE,2018:7132-7141. |
| [22] | OUYANG D, HE S, ZHANG G,et al .Efficient multi-scale attention module with cross-spatial learning[C]∥ Proceedings of 2023 IEEE International Confe-rence on Acoustics,Speech and Signal Processing.Rhodes Island:IEEE,2023:1-5. |
| [23] | ZHU X, HU H, LIN S,et al .Deformable ConvNets v2:more deformable,better results[C]∥ Procee-dings of 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition.Long Beach:IEEE,2019:9308-9316. |
| [24] | HONDA H, UCHIDA Y .CLRerNet:improving confidence of lane detection with LaneIoU[C]∥ Procee-dings of 2024 IEEE/CVF Winter Conference on Applications of Computer Vision.Waikoloa:IEEE,2024:1176-1185. |
| [25] | LOSHCHILOV I, HUTTER F .Decoupled weight decay regularization[EB/OL].(2017-11-14)[2025-05-22].. |
| [26] | LIU L, CHEN X, ZHU S,et al .CondLaneNet:a top-to-down lane detection framework based on conditional convolution[C]∥ Proceedings of 2021 IEEE/CVF International Conference on Computer Vision.Montreal:IEEE,2021:3773-3782. |
| [27] | QIN Z, ZHANG P, LI X .Ultra fast deep lane detection with hybrid anchor driven ordinal classification[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,2022,46(5):2555-2568. |
| [1] | Chen Yun-long Ye Wu Feng Sui-li. SeveraI EssentiaI Laws Required by Modern Network Traffic [J]. Journal of South China University of Technology (Natural Science Edition), 2007, 35(5): 54-59. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||