Journal of South China University of Technology(Natural Science Edition) ›› 2025, Vol. 53 ›› Issue (6): 44-55.doi: 10.12141/j.issn.1000-565X.240330
• Vehicle Engineering • Previous Articles Next Articles
Design of Acceleration Slip Regulation Multi-Mode Control Strategy of Distributed Drive Electric Vehicle
ZHU Shaopeng1,2(), MAO Jingyang1, LIU Dongqing3, YIN Yuming4, CHEN Huipeng5, XU Yekai1
- 1.Power Machinery & Vehicle Engineering Institute,Zhejiang University,Hangzhou 310027,Zhejiang,China
2.Jiaxing Research Institute,Zhejiang University,Jiaxing 314011,Zhejiang,China
3.CRSC Research & Design Institute Group;Co. ,Ltd. ,Beijing 100070,China
4.College of Mechanical Engineering,Zhejiang University of Technology,Hangzhou 310023,Zhejiang,China
5.School of Mechanical Engineering,Hangzhou Dianzi University,Hangzhou 310018,Zhejiang,China
-
Received:2024-06-26Online:2025-06-25Published:2024-09-27 -
Supported by:the National Key Research and Development Program of China(2022YFB2502400)
CLC Number:
Cite this article
ZHU Shaopeng, MAO Jingyang, LIU Dongqing, YIN Yuming, CHEN Huipeng, XU Yekai. Design of Acceleration Slip Regulation Multi-Mode Control Strategy of Distributed Drive Electric Vehicle[J]. Journal of South China University of Technology(Natural Science Edition), 2025, 53(6): 44-55.
share this article
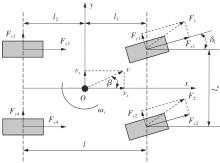
Fig.1
Seven-degree freedom vehicle dynamic model"
Fig.2
μ-λ curve of standard pavement"
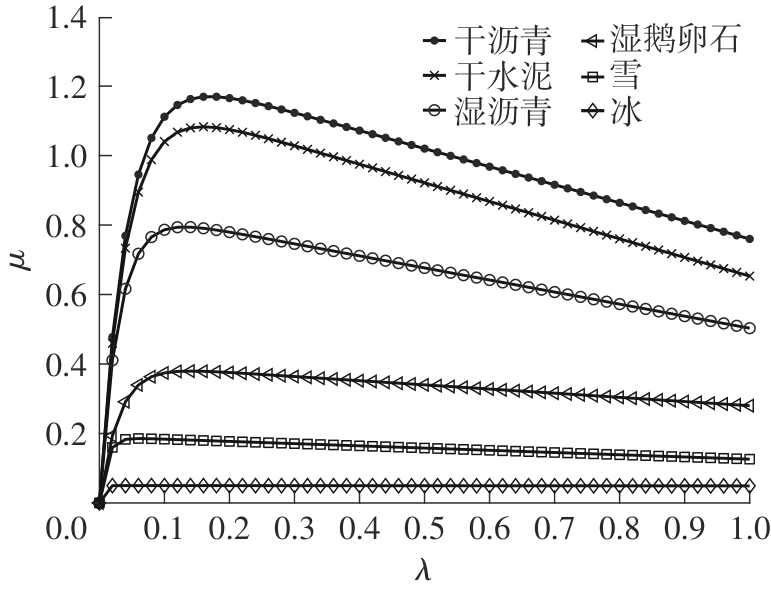
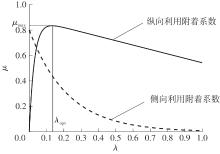
Fig.3
Relationship curve between adhesion coefficient and slip ratio"
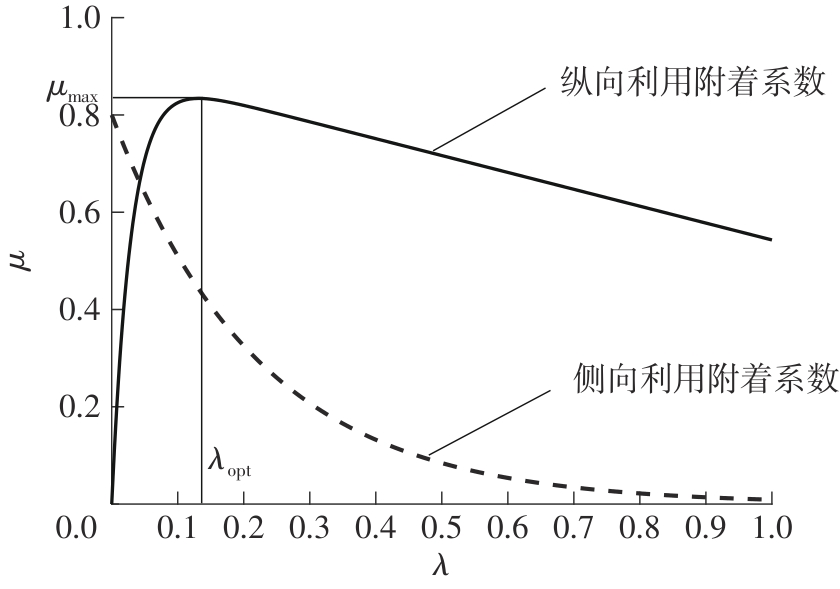
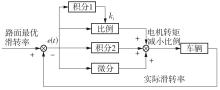
Fig.4
Improved PID control structure"

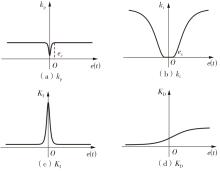
Fig.5
Variation curve of each coefficient with deviation"
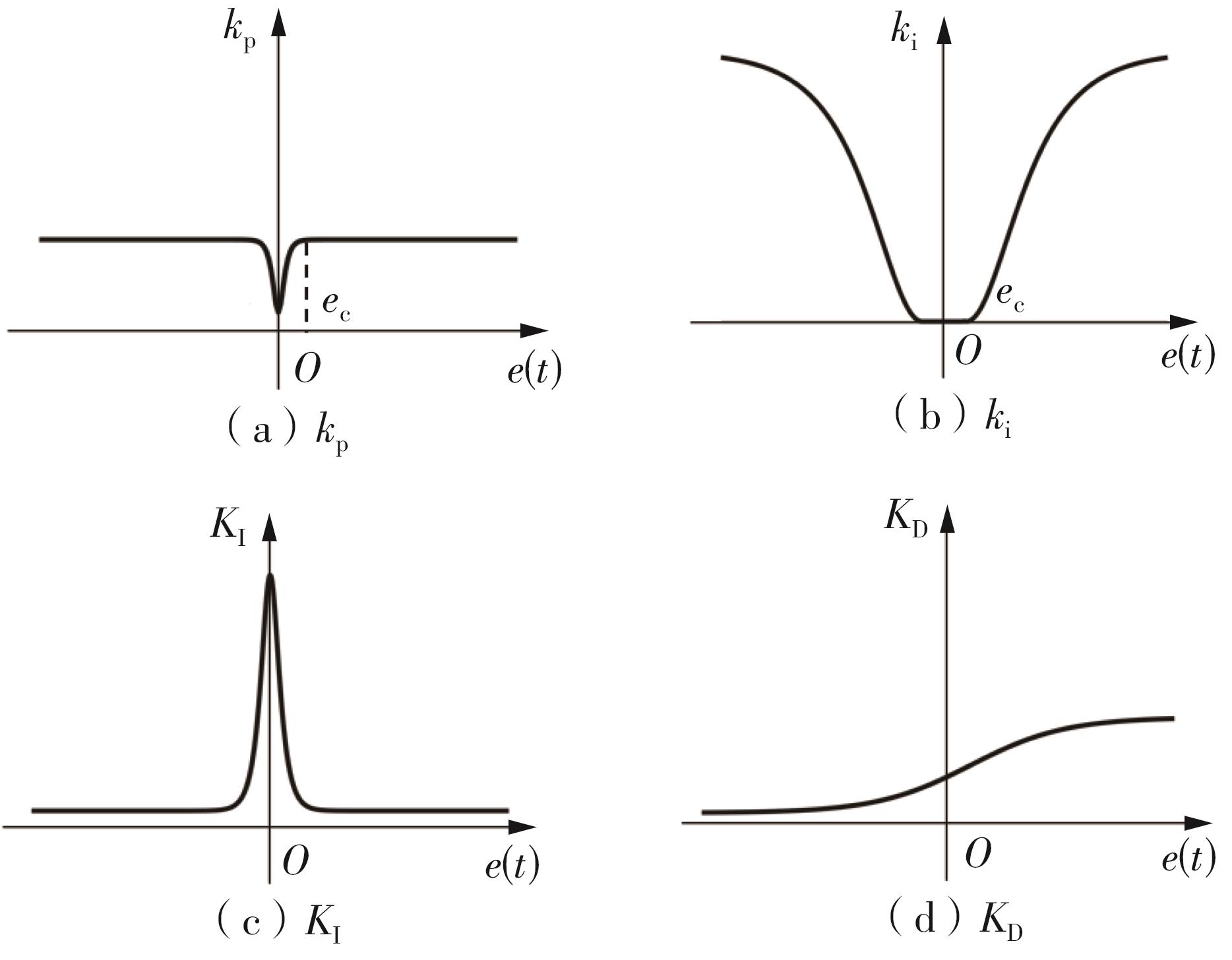
Table 1
Vehicle parameters"
| 参数 | 数值 |
|---|---|
| 整车质量/kg | 3 000 |
| 质心高度/m | 0.650 |
| 质心到前轴的距离/m | 1.500 |
| 质心到后轴的距离/m | 1.500 |
| 轴距/m | 3.000 |
| 轮距/m | 1.680 |
| 轮胎滚动半径/m | 0.355 |
| 横摆转动惯量/(kg·m2) | 2 059 |
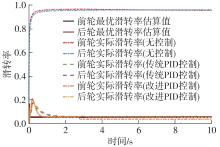
Fig.6
Comparison of straight-line acceleration slip ratios on low adhesion coefficient road surface"
Table 2
Adjustment time under low adhesion road surface conditions with different road surface adhesion coefficients"
| 路面附着系数 | 调节时间/s | 路面附着系数 | 调节时间/s | ||
|---|---|---|---|---|---|
| 0.4 | 0.1 | 0.2 | 0.7 | ||
| 0.3 | 0.3 | 0.1 | 1.2 | ||
Fig.7
Comparison of straight-line acceleration slip ratios on high and low adhesion coefficient joint road surfaces"
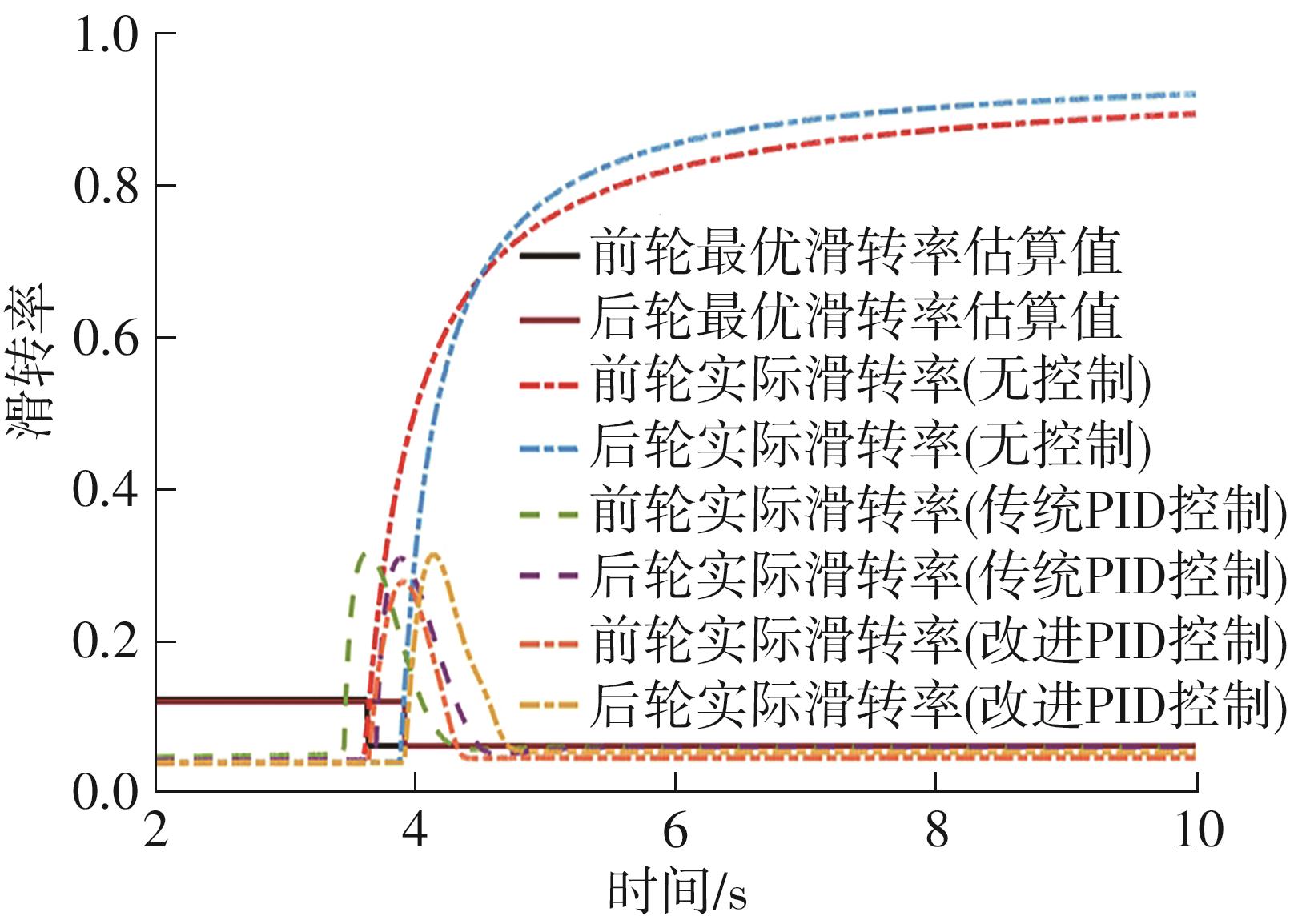
Table 3
Adjustment time under high and low adhesion coefficient joint road surfaces conditions with different road surface adhesion coefficients"
| 路面附着系数 | 调节 时间/s | 路面附着系数 | 调节 时间/s | ||||||
|---|---|---|---|---|---|---|---|---|---|
| 驶入前 | 驶入后 | 驶入前 | 驶入后 | ||||||
| 0.9 | 0.3 | 0.4 | 0.7 | 0.3 | 0.4 | ||||
| 0.9 | 0.2 | 1.1 | 0.7 | 0.2 | 1.0 | ||||
| 0.9 | 0.1 | 1.4 | 0.7 | 0.1 | 1.3 | ||||
| 0.8 | 0.3 | 0.4 | 0.6 | 0.3 | 0.4 | ||||
| 0.8 | 0.2 | 1.0 | 0.6 | 0.2 | 1.0 | ||||
| 0.8 | 0.1 | 1.3 | 0.6 | 0.1 | 1.3 | ||||

Fig.8
Comparison of straight-line acceleration slip ratios on high and low adhesion coefficient bisectional road surfaces"
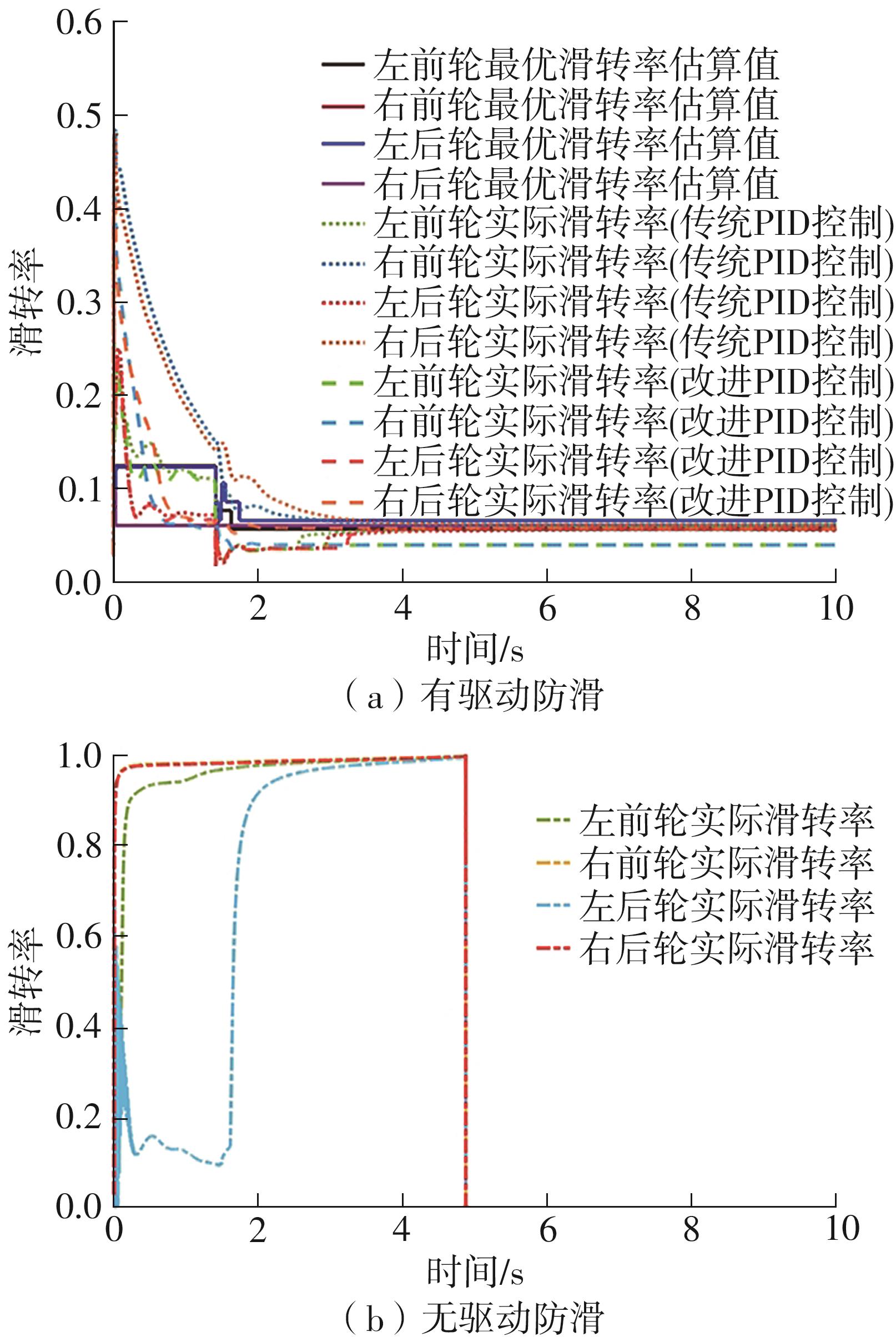
Fig.9
Straight-line acceleration four-wheel drive torque on high and low adhesion coefficient bisectional road surfaces"
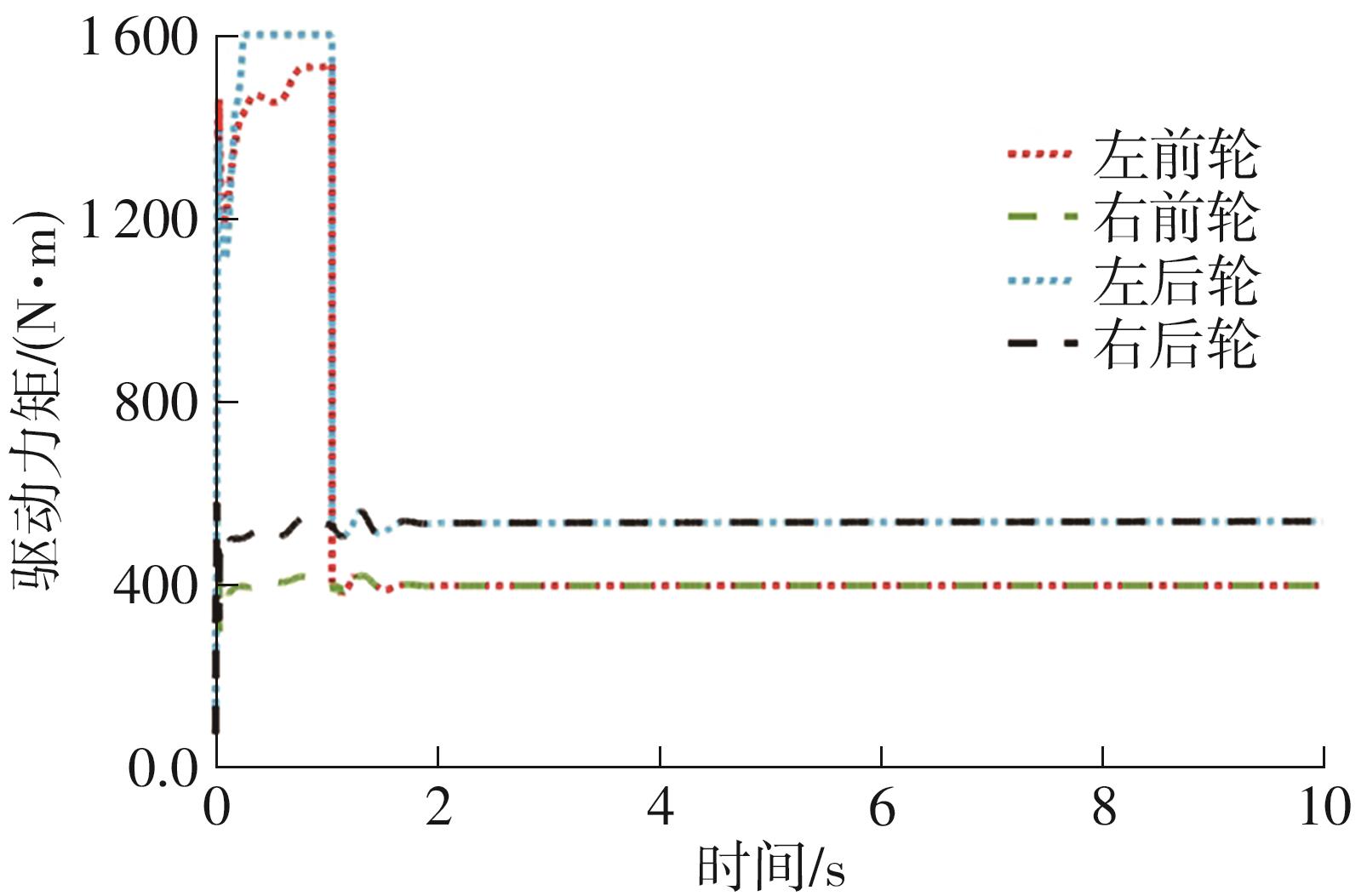
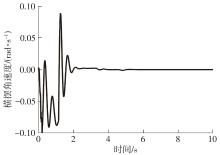
Fig.10
Straight-line acceleration yaw rate on high and low adhesion coefficient bisectional road surfaces"
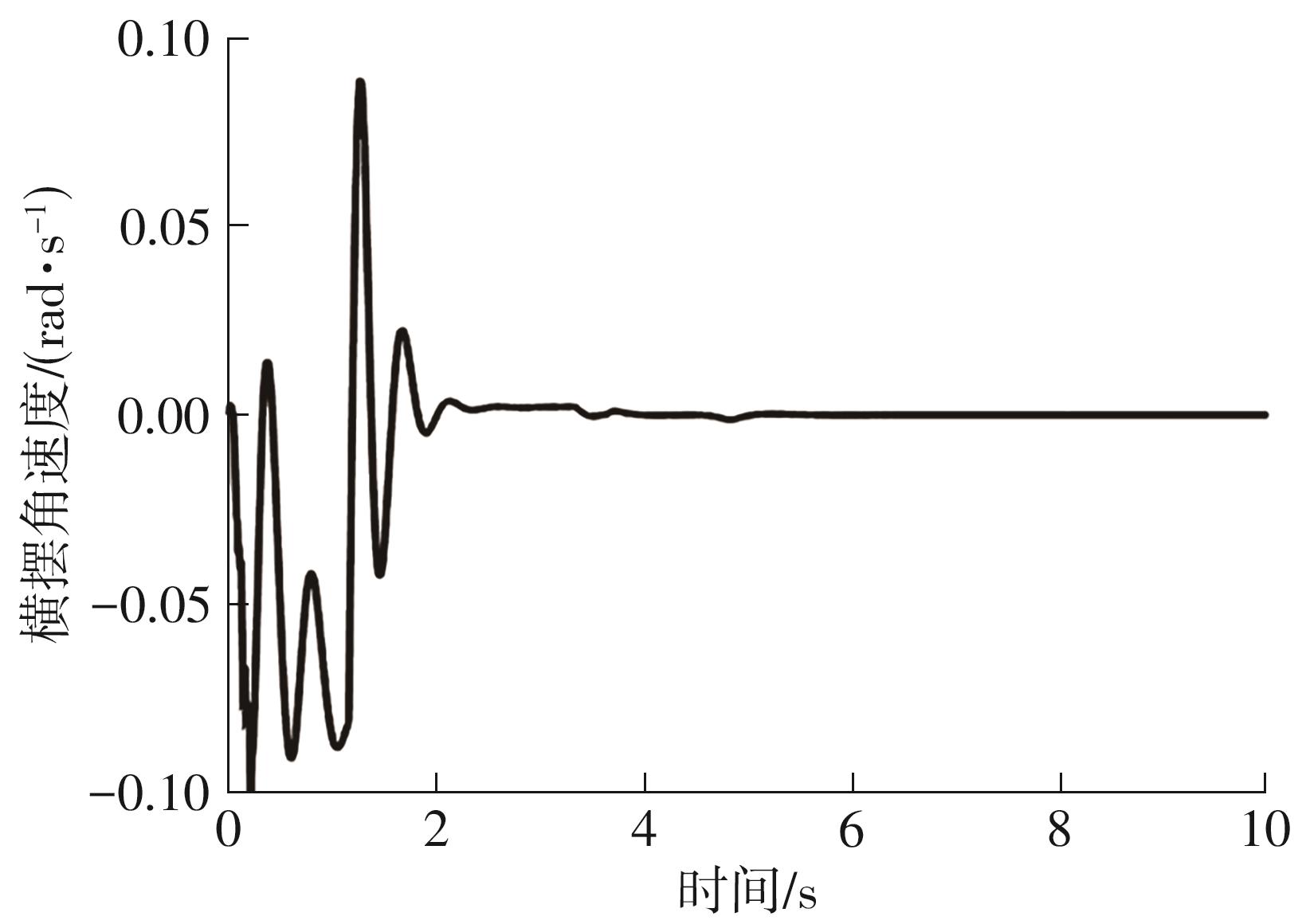

Fig.11
Comparison of straight-line acceleration vehicle speeds and traveling trace on high and low adhesion coefficient bisectional road surfaces"
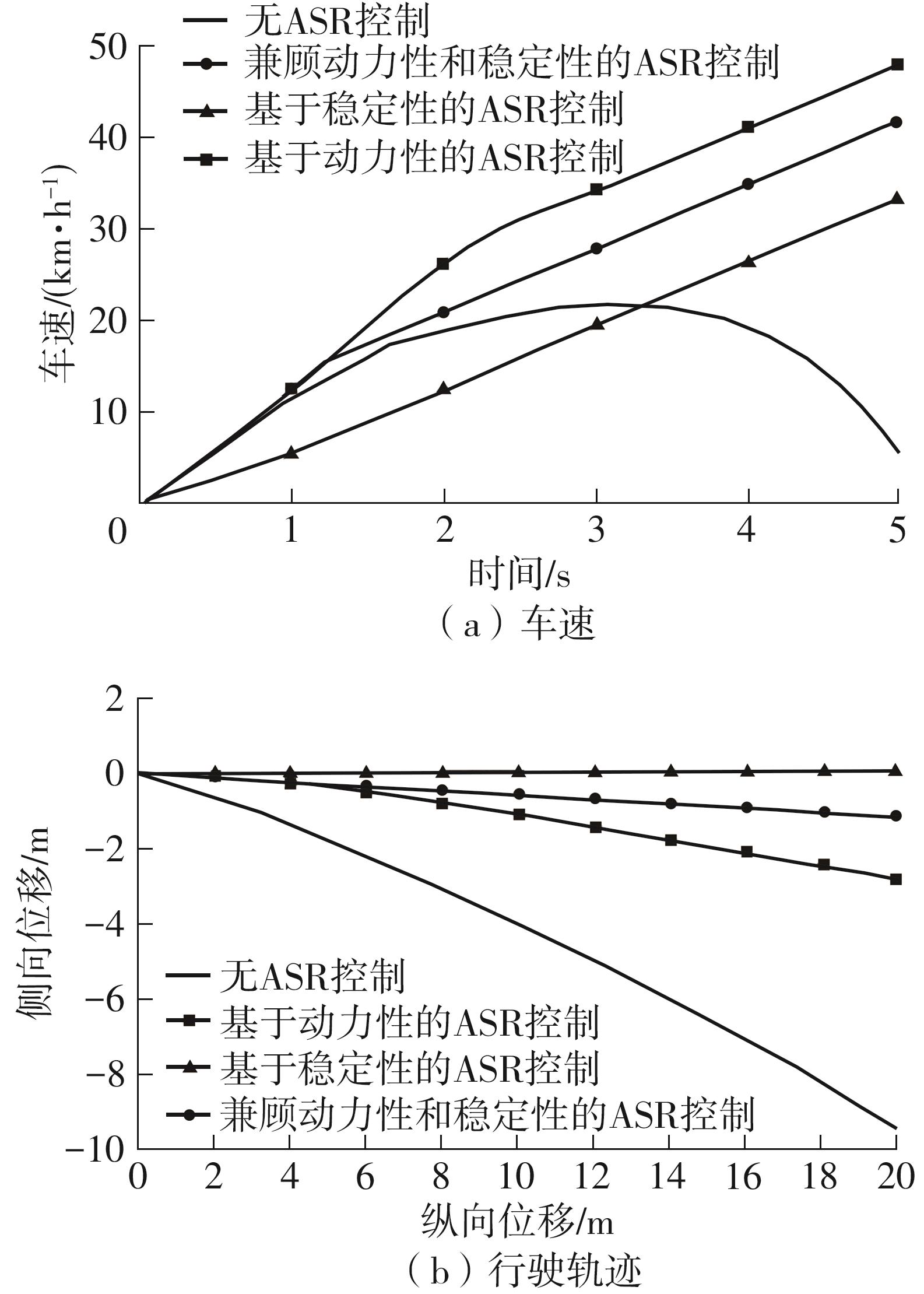
Table 4
Acceleration time and lateral displacement under different road surface adhesion conditions"
| 路面附着系数 | 加速时间/s | 侧向位移/m | |
|---|---|---|---|
| 左侧 | 右侧 | ||
| 0.9 | 0.3 | 1.0 | -0.60 |
| 0.9 | 0.2 | 1.1 | -0.98 |
| 0.9 | 0.1 | 1.3 | -1.32 |
| 0.8 | 0.3 | 1.0 | -0.63 |
| 0.8 | 0.2 | 1.2 | -1.13 |
| 0.8 | 0.1 | 1.3 | -1.41 |
| 0.7 | 0.3 | 1.1 | -0.68 |
| 0.7 | 0.2 | 1.2 | -1.17 |
| 0.7 | 0.1 | 1.4 | -1.48 |
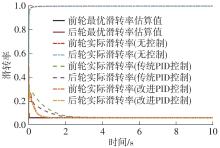
Fig.12
Comparison of straight-line climbing slip ratios on low adhesion road surfaces"
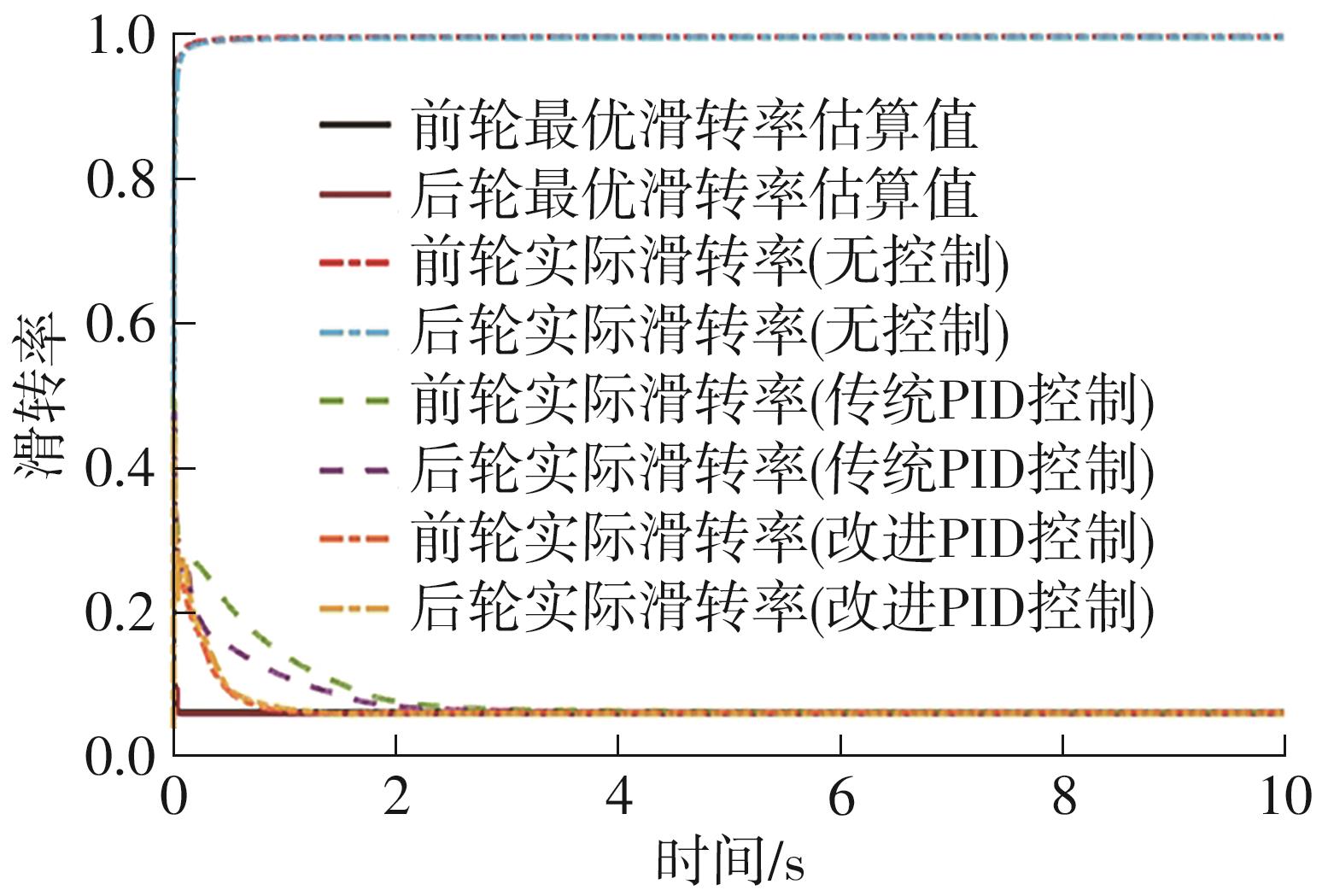
Fig.13
Comparison of straight-line climbing vehicle speeds on low adhesion road surfaces"
Table 5
Maximum climbing slope under different road surface adhesion conditions"
| 路面附着系数 | 最大爬坡度/% | 路面附着系数 | 最大爬坡度/% | ||
|---|---|---|---|---|---|
| 0.1 | 9 | 0.3 | 26 | ||
| 0.2 | 18 | 0.4 | 35 | ||

Fig.14
Comparison of straight-line climbing slip ratios on high and low adhesion coefficient bisectional road surfaces"
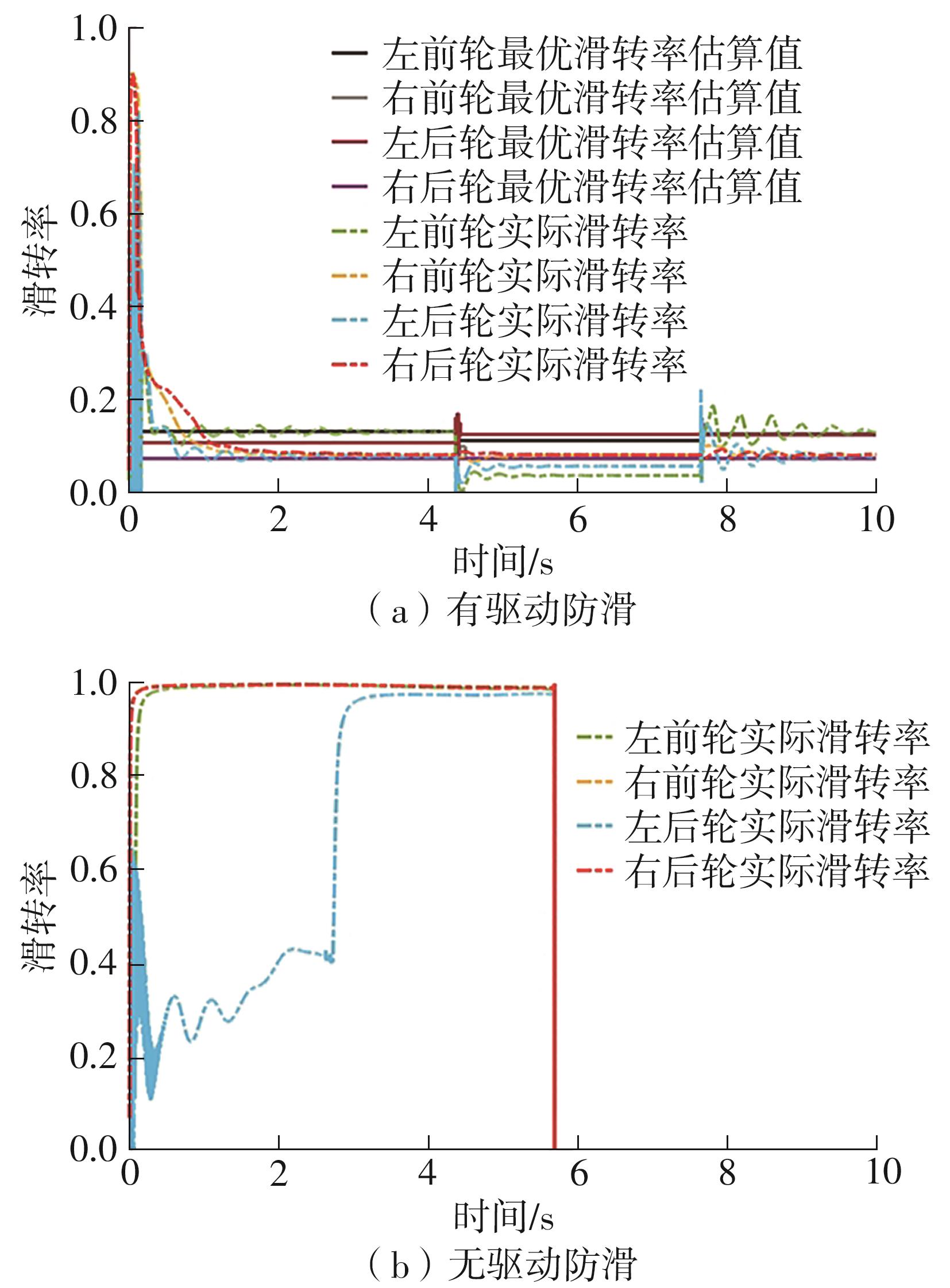
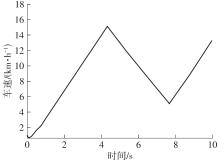
Fig.15
Straight-line climbing vehicle speed on high and low adhesion coefficient bisectional road surfaces"

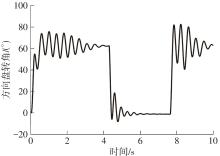
Fig.16
Straight-line climbing steering wheel angle on high and low adhesion coefficient bisectional road surfaces"
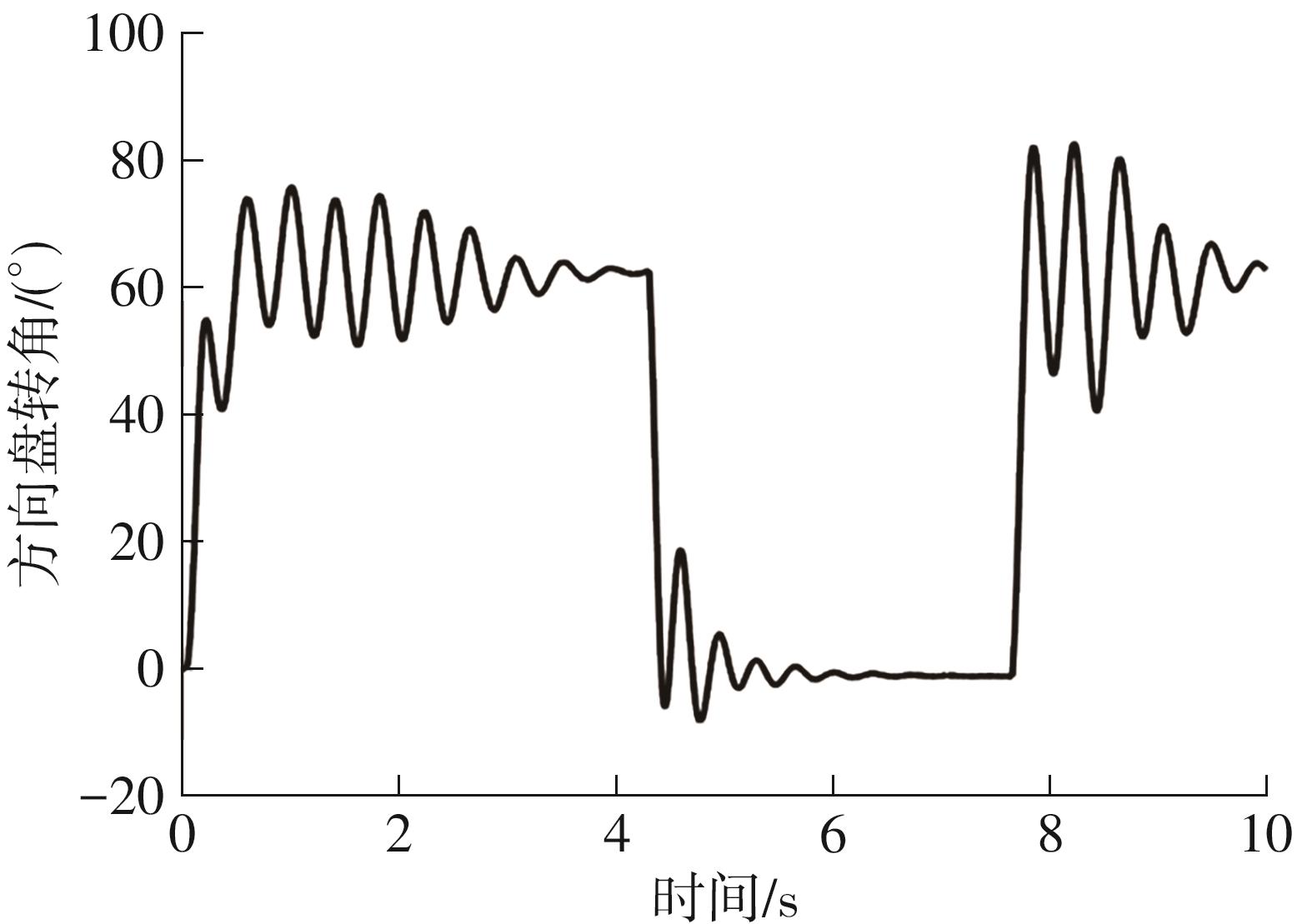
Table 6
Maximum climbing slope and steering wheel angle under different road surface adhesion conditions"
| 路面附着系数 | 最大爬坡度/% | 方向盘转角/(°) | |
|---|---|---|---|
| 左侧 | 右侧 | ||
| 0.9 | 0.3 | 44 | 63 |
| 0.9 | 0.2 | 37 | 68 |
| 0.9 | 0.1 | 24 | 77 |
| 0.8 | 0.3 | 41 | 44 |
| 0.8 | 0.2 | 32 | 61 |
| 0.8 | 0.1 | 21 | 76 |
| 0.7 | 0.3 | 39 | 35 |
| 0.7 | 0.2 | 28 | 50 |
| 0.7 | 0.1 | 19 | 74 |
| 1 | 王震坡,丁晓林,张雷 .四轮轮毂电机驱动电动汽车驱动防滑控制关键技术综述[J].机械工程学报,2019,55(12):99-120. |
| WANG Zhenpo, DING Xiaolin, ZHANG Lei .Overview on key technologies of acceleration slip regulation for four-wheel-independently-actuated electric vehicles[J].Journal of Mechanical Engineering,2019,55(12):99-120. | |
| 2 | 李静,李幼德,赵健,等 .四轮驱动汽车牵引力控制系统研究[J].吉林大学学报(工学版),2003,33(4):1-6. |
| LI Jing, LI You-de, ZHAO Jian,et al .Research on traction control system for four wheel drive vehicle[J].Journal of Jilin University (Engineering and Technology Edition),2003,33 (4):1-6. | |
| 3 | 常九健,吴佳豪,方建平 .基于路面识别算法的分布式驱动汽车驱动防滑控制策略[J].重庆理工大学学报(自然科学),2024,38(2):65-76. |
| CHANG Jiujian, WU Jiahao, FANG Jianping .Research on acceleration slip regulation strategy based on road surface recognition algorithm[J].Journal of Chongqing University of Technology (Natural Science),2024,38(2):65-76. | |
| 4 | KATO M .Proposal of anti-slip control method for electric vehicles with adaptive torque limiter[C]∥Procee-dings of the JSAE Annual Congress (Spring).Yokohama:JSAE,2013:1-4. |
| 5 | 梅中祎 .电驱动客车驱动防滑控制方法及关键问题研究[D].北京:北京林业大学,2022. |
| 6 | 张博涵,陈哲明,付江华,等 .四轮独立驱动电动汽车自适应驱动防滑控制[J].山东大学学报(工学版),2018,48(1):96-103. |
| ZHANG Bohan, CHEN Zheming, FU Jianghua,et al. Self-adaption acceleration slip regulation control of four-wheel independently-driving electric vehicle[J].Journal of Shandong University (Engineering Science),2018,48(1):96-103. | |
| 7 | 李杰 .分布驱动式纯电动汽车驱动防滑控制策略[D].太原:太原科技大学,2022. |
| 8 | 罗浩 .分布式驱动电动汽车驱动防滑控制策略研究[D].北京:北京理工大学,2016. |
| 9 | 张伦 .轮边电机驱动电动汽车驱动防滑控制的研究[D].南京:东南大学,2019. |
| 10 | 赵永强 .四轮轮毂驱动电动汽车扭矩优化分配方法的研究[D].长春:吉林大学,2021. |
| 11 | PACEJKA H B, BAKKER E .The magic formula tyre model[J].Vehicle System Dynamics,1992,21:1-18. |
| 12 | 孙大许,兰凤崇,何幸福,等 .双电机四轮驱动电动汽车自适应驱动防滑控制的研究[J].汽车工程,2016,38(5):600-608,619. |
| SUN Daxu, LAN Fengchong, HE Xingfu,et al .Study on adaptive acceleration slip regulation for dual-motor four-wheel drive electric vehicle[J].Automotive Engineering,2016,38(5):600-608,619. | |
| 13 | BURCKHARDT M .Fahrwerktechnik:radschlupf regelsyste me[M].Würzburg:Vogel,1993. |
| 14 | CHEN L, BIAN M Y, LUO Y G,et al .Real-time identification of the tyre-road friction coefficient using an unscented Kalman filter and mean-square-error-weighted fusion[J].Proceedings of the Institution of Mechanical Engineers,Part D:Journal of Automobile Engineering,2016,230(6):788-802. |
| 15 | GUSTAFSSON F .Slip-based tire-road friction estimation[M].London:Pergamon Press,Inc,1997. |
| 16 | 魏来 .电动汽车驱动防滑控制方法研究[D].沈阳:沈阳工业大学,2016. |
| 17 | 宋炳潭,孙宾宾,葛文庆,等 .双电机电动汽车驱动防滑转控制策略研究[J].现代制造工程,2021(10):11-16,39. |
| SONG Bingtan, SUN Binbin, GE Wenqing,et al .Research on acceleration slip regulation control strategy of dual-motor electric vehicle[J].Modern Manufactu-ring Engineering,2021(10):11-16,39. | |
| 18 | 朱文静,李刚,姬晓 .四轮独立驱动电动汽车驱动力矩分配方法[J].重庆理工大学学报(自然科学),2022,36(3):41-47. |
| ZHU Wenjing, LI Gang, JI Xiao .Driving torque distribution method for four-wheel independent drive electric vehicle[J].Journal of Chongqing University of Technology (Natural Science),2022,36(3):41-47. |
| [1] | BI Jun, WANG Jianing, WANG Yongxing. Short-Term Operation State Prediction of Charging Station Based on LSTM-FC Model [J]. Journal of South China University of Technology(Natural Science Edition), 2025, 53(2): 58-67. |
| [2] | YANG Miaoyan, DONG Chunjiao, XIONG Zhihua, ZHUANG Yan, XU Bo. Hotspot Segments Identification of Collisions Between Electric Vehicles and Pedestrians/Non-Motor Vehicles [J]. Journal of South China University of Technology(Natural Science Edition), 2025, 53(11): 112-121. |
| [3] | SHANGGUAN Wenbin, YUE Lian, LÜ Hui, et al. Fatigue Test and Calculation Methods for Battery Package Based on Load Spectrum [J]. Journal of South China University of Technology(Natural Science Edition), 2024, 52(3): 50-56. |
| [4] | DONG Ping, WEI Shuyang, LIU Mingbo. Scheduling Strategies for Electric Vehicle Participation in Electricity Markets Under Multi-Network Collaboration [J]. Journal of South China University of Technology(Natural Science Edition), 2023, 51(12): 83-94. |
| [5] | PEI Mingyang, ZHU Hongyu. Modeling Method for Optimizing Dynamic Wireless Charging Lane of Electric Vehicles [J]. Journal of South China University of Technology(Natural Science Edition), 2023, 51(10): 135-151. |
| [6] | LUO Yutao, WU Zhiqiang . Online Joint Estimation of Main States of Lithium-Ion Battery Based on DAEKF Algorithm [J]. Journal of South China University of Technology(Natural Science Edition), 2023, 51(1): 84-94. |
| [7] | LÜ Hui, ZHAO Jiawei, MAO Haikuan, et al. Analysis of the Powertrain Mount Systems of Electric Vehicles by Considering the Correlation of Probabilistic Parameters [J]. Journal of South China University of Technology(Natural Science Edition), 2022, 50(3): 65-72. |
| [8] | ZHANG Xin CUI Yuxuan XUE Qicheng. Torque Coordinated Control Strategy of PHEV Engine Starting in Motion Process [J]. Journal of South China University of Technology(Natural Science Edition), 2021, 49(8): 129-139. |
| [9] | LIU Hanwu, LEI Yulong, FU Yao, et al. Adaptive Regenerative Braking Control Strategy of Range-Extended Electric Vehicle Based on Multi-Objective Optimization [J]. Journal of South China University of Technology (Natural Science Edition), 2021, 49(7): 42-50,65. |
| [10] | GUO Lie, GE Pingshu, XU Linna, et al. Stability Control for Distributed Drive Electric Vehicle Under Steering Condition [J]. Journal of South China University of Technology (Natural Science Edition), 2020, 48(3): 100-107. |
| [11] | YANG Jinming SUN Jieshan LIU Runpeng. Passivity-Based Control of Primary-Side and Secondary-Side Rectifier Bridge in Wireless Power Transfer System for Electric Vehicle [J]. Journal of South China University of Technology(Natural Science Edition), 2020, 48(10): 11-18,47. |
| [12] | QIN Datong QIN Ling. Energy Management Strategy for a Power-split Hybrid Electric Vehicle Based on Explicit Stochastic Model Predictive Control [J]. Journal of South China University of Technology(Natural Science Edition), 2019, 47(7): 112-120. |
| [13] | YAO Mingyao ZHANG Xiaoxing QIN Datong. Real-Time Optimization of Equivalent Factor for Plug-in Hybrid Electric Vehicle [J]. Journal of South China University of Technology (Natural Science Edition), 2019, 47(11): 44-53. |
| [14] |
YAN Junhua WANG Shuxiao YUAN Haoran CHEN Yong SHAN Rui.
Life Cycle Assessment of Energy Consumption with Emission and Environmental Impact of Electric Vehicle
[J]. Journal of South China University of Technology (Natural Science Edition), 2018, 46(6): 137-144.
|
| [15] | XIONG Huiyuan HE Shan ZHA Hongshan ZHU Xionglai. Control Strategy of Driving Torque Distribution for Two-Axle Drive Electric Vehicles#br# [J]. Journal of South China University of Technology(Natural Science Edition), 2018, 46(11): 117-124. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||