Journal of South China University of Technology(Natural Science Edition) ›› 2024, Vol. 52 ›› Issue (2): 124-135.doi: 10.12141/j.issn.1000-565X.220489
• Green & Intelligent Transportation • Previous Articles Next Articles
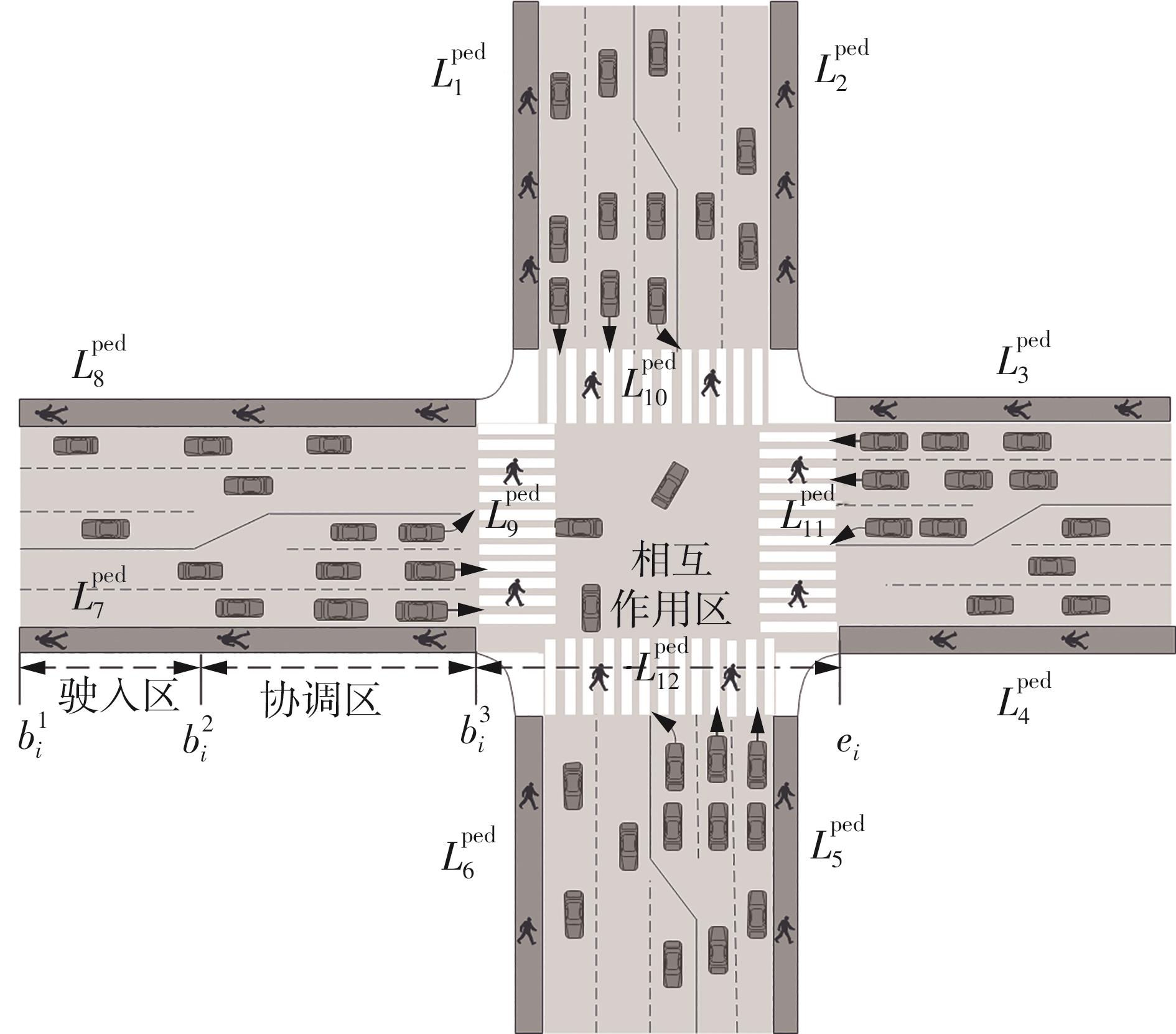
Management Method of Autonomous Vehicles and Pedestrians at Intersections Based on Maximum Pressure Controls
CAO Ningbo1 ZHAO Liying2
- 1.School of Transportation Engineering,Chang’an University,Xi’an 710061,Shaanxi,China
2.School of Economics and Management,Xi’an University of Technology,Xi’an 710048,Shaanxi,China