Journal of South China University of Technology(Natural Science Edition) ›› 2022, Vol. 50 ›› Issue (10): 19-28.doi: 10.12141/j.issn.1000-565X.210703
Special Issue: 2022年交通运输工程
• Traffic & Transportation Engineering • Previous Articles Next Articles
Braking Collision Avoidance System for Vehicles Driving on Superhighway Based on Co-simulation
HE Yongming1,2 FENG Jia1,2 QUAN Cong1,2 CHEN Shisheng1,2 CAO Jian1,2
- 1.School of Transportation,Northeast Forestry University,Harbin 150040,Heilongjiang,China
2.Research Institute of Superhighway in Harbin,Harbin 150040,Heilongjiang,China
-
Received:2021-11-09Online:2022-10-25Published:2022-04-29 -
Contact:何永明(1979-),男,博士,副教授,主要从事超高速公路和道路交通仿真研究。 E-mail:hymjob@nefu.edu.cn -
About author:何永明(1979-),男,博士,副教授,主要从事超高速公路和道路交通仿真研究。 -
Supported by:the Natural Science Foundation of Heilongjiang Province(LH2019E004)
CLC Number:
Cite this article
HE Yongming, FENG Jia, QUAN Cong, et al. Braking Collision Avoidance System for Vehicles Driving on Superhighway Based on Co-simulation[J]. Journal of South China University of Technology(Natural Science Edition), 2022, 50(10): 19-28.
share this article
Table 1
Vehicle setting parameters"
| 参数 | 数值 | 参数 | 数值 | ||
|---|---|---|---|---|---|
| 整车质量/kg | 1 110 | 怠速/(r·min-1) | 750 | ||
| 轴距/mm | 2 600 | 最大扭矩/(N·m) | 620 | ||
| 质心至前轴距离/mm | 1 040 | 轮胎有效滚动半径/mm | 298 | ||
| 质心高度/mm | 540 | 汽车绕Z轴转动惯量/(kg·m2) | 1 343 | ||
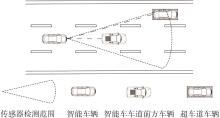
Fig.1
Simulated scenarios"
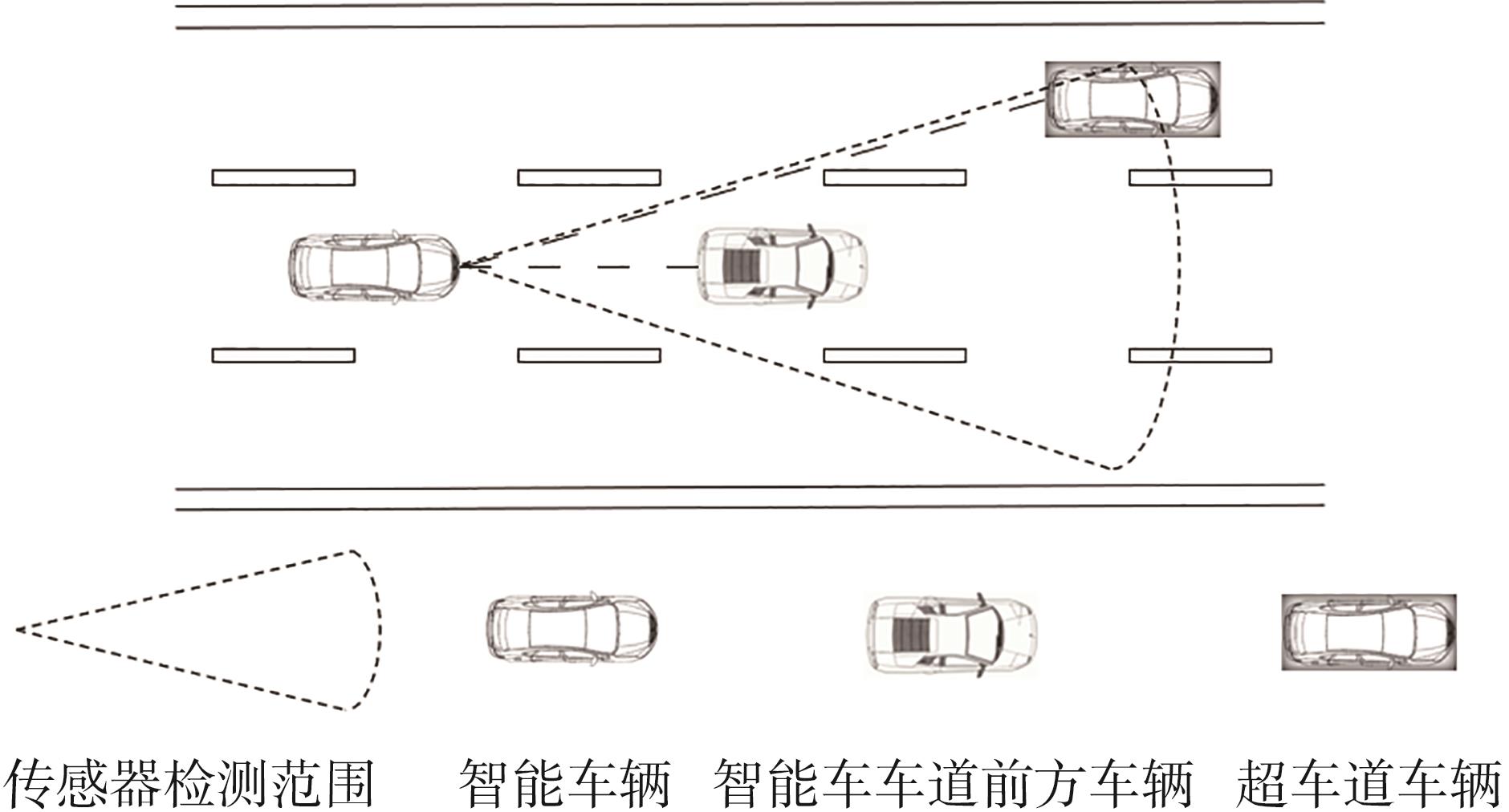
Table 2
Sensor installation position and detection range"
| 位置坐标/mm | 方位角/(°) | 长度范围/m | 角度范围/(°) |
|---|---|---|---|
| (700,0,700) | (0,0,0) | 0~200 | -10~10 |
Table 3
Aerodynamic parameters"
| 参考点坐标 | 正向迎风面积/m2 | 参考长度/m | 空气密度/(kg·m-3) |
|---|---|---|---|
| (-1 300,0,0) | 1.6 | 2.6 | 1.21 |
Table 4
Value of adhesion coefficient"
| 路面状况 | 干燥 | 潮湿 | ||
|---|---|---|---|---|
| <48 km/h | >48 km/h | <48 km/h | >48 km/h | |
| 沥青路面 | 0.80~1.00 | 0.60~0.70 | 0.50~0.80 | 0.45~0.75 |
Table 5
Input/output parameters"
| 类别 | 参数名称 | 参数含义 |
|---|---|---|
| 输入参数 | PCON_BK | 主缸压力 |
| Throttle | 节气门开度 | |
| 输出参数 | S1 | 两车间距 |
| Vx | 智能车车速 |
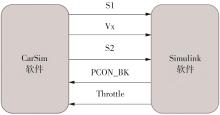
Fig.2
Data interchange diagram"
Table 6
Braking distances"
| 轮缸压力/MPa | 5 | 6 | 7 | 8 | 9 | 10 |
|---|---|---|---|---|---|---|
| 制动距离/m | 171.2 | 170.7 | 170.3 | 170.4 | 170.5 | 170.7 |
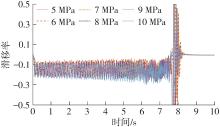
Fig.3
Change of slip rate of left front wheel"
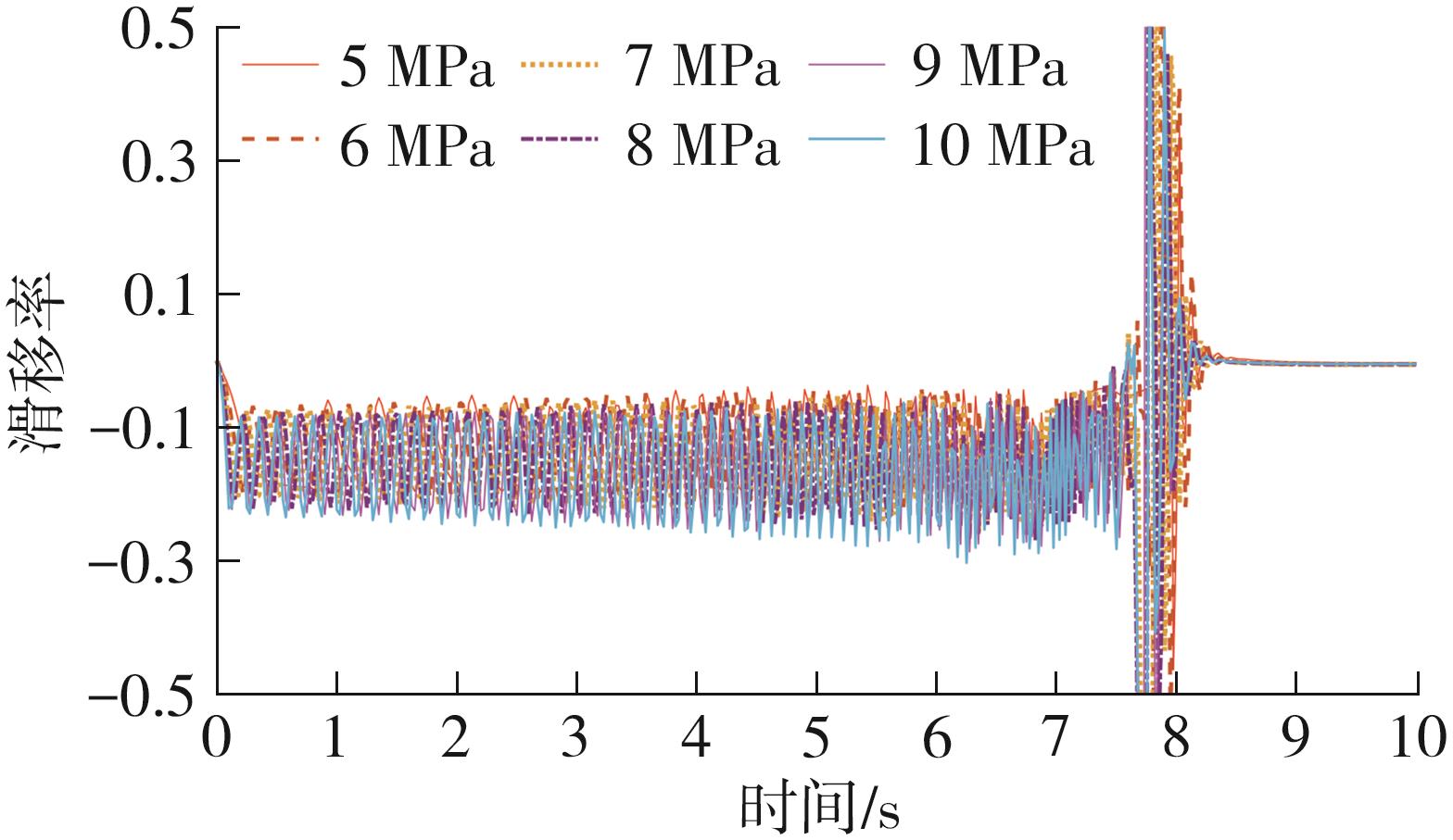
Fig.4
Change of cylinder pressure of left front wheel"
Table 7
Setting of simulation parameters"
| 参数 | 数值 | ||
|---|---|---|---|
| 工况一 | 工况二 | 工况三 | |
| 前车车速/(km·h-1) | 100 | 120 | 140 |
| 智能车车速/(km·h-1) | 140 | 160 | 180 |
| 初始间距/m | 30 | 30 | 30 |
| 车速一样时车间距/m | 19.2 | 19.3 | 19.5 |
| 相对最小安全距离/m | 10.8 | 10.7 | 10.5 |
| 相对最小安全距离建议值/m | 11 | 11 | 11 |
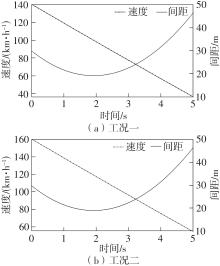
Fig.5
Changes in speed and spacing during braking"
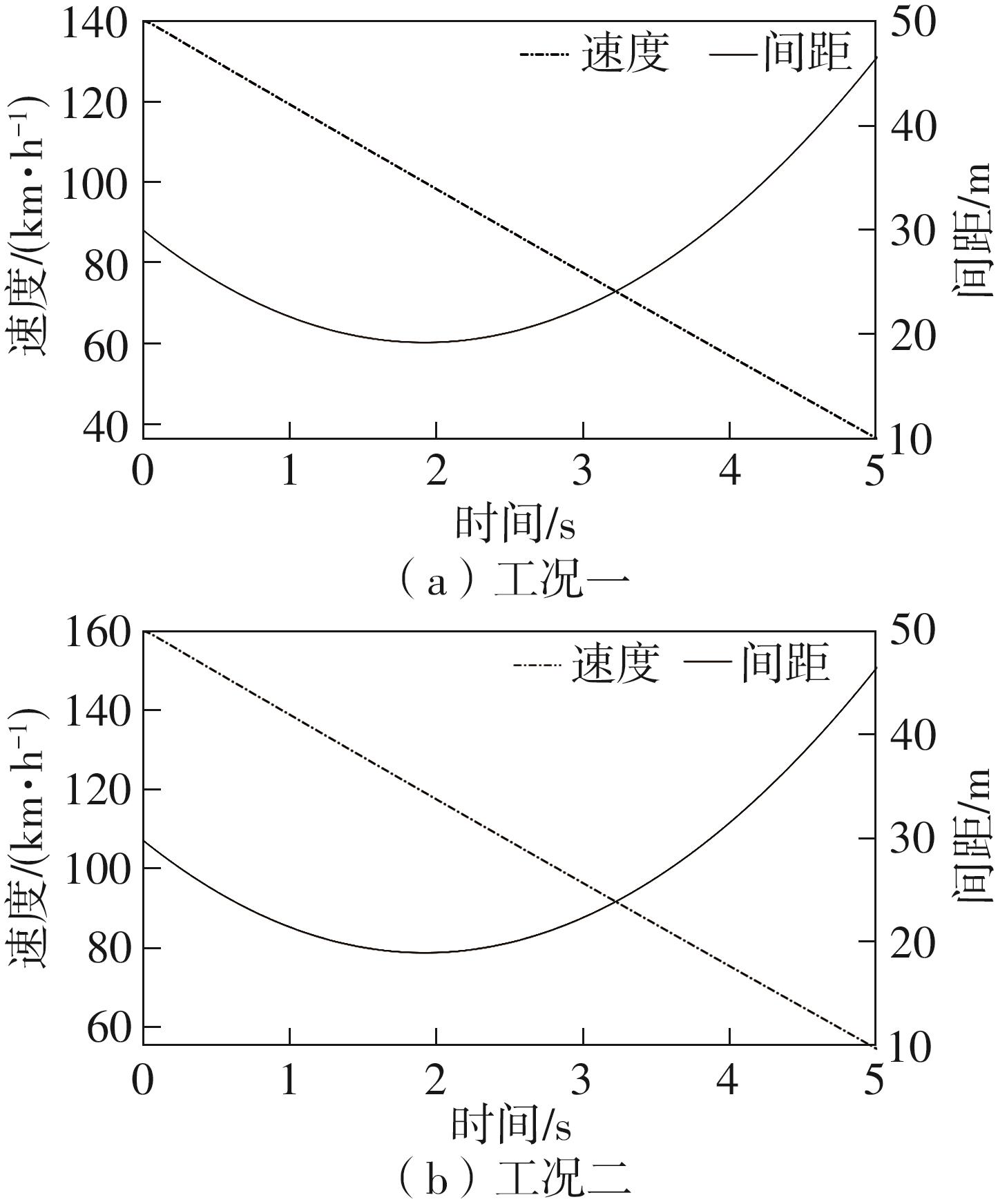
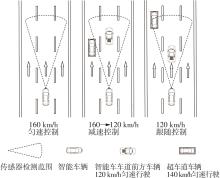
Fig.6
Collision avoidance process of intelligent vehicle"
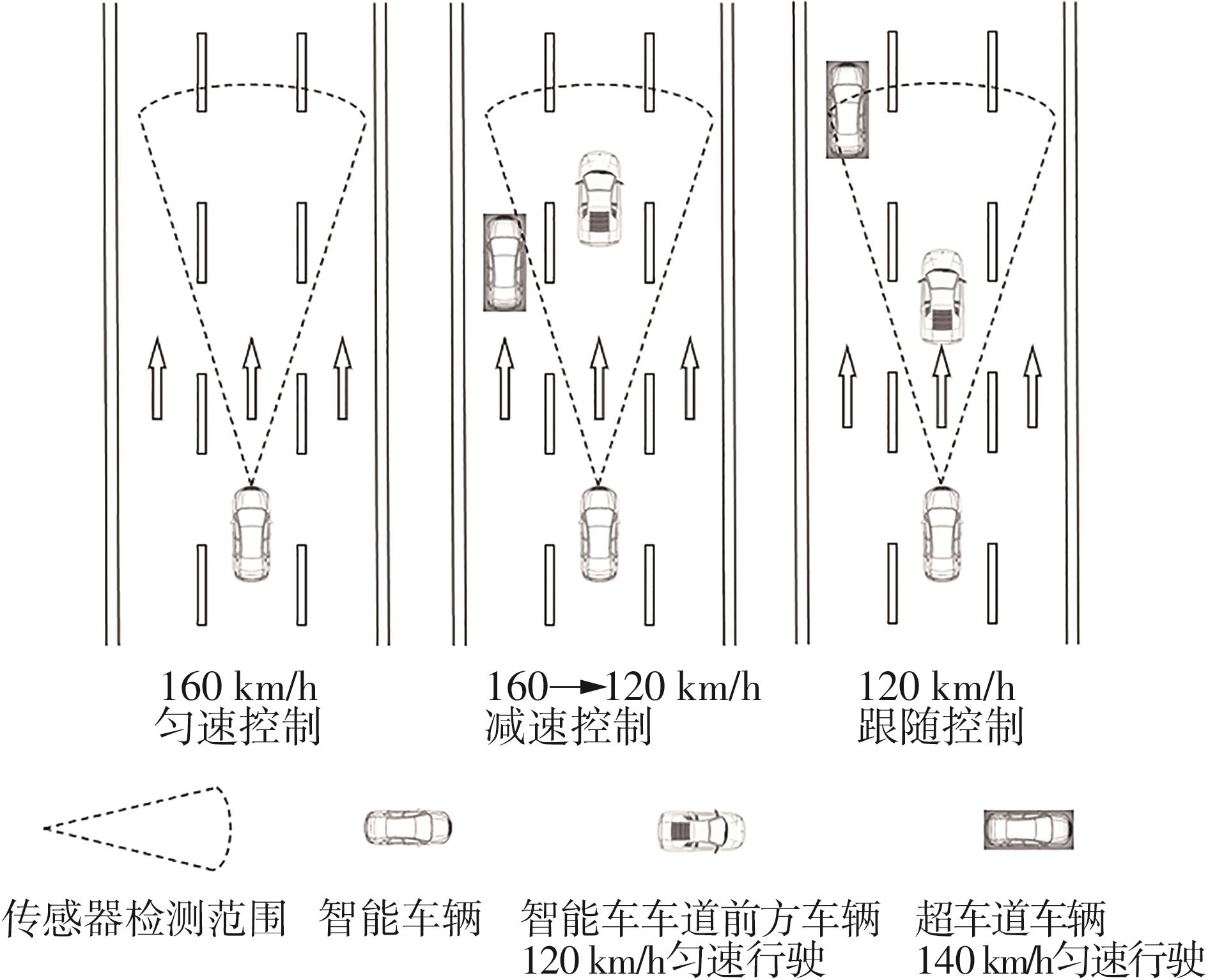
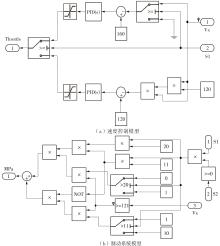
Fig.7
Speed control model and braking system model"
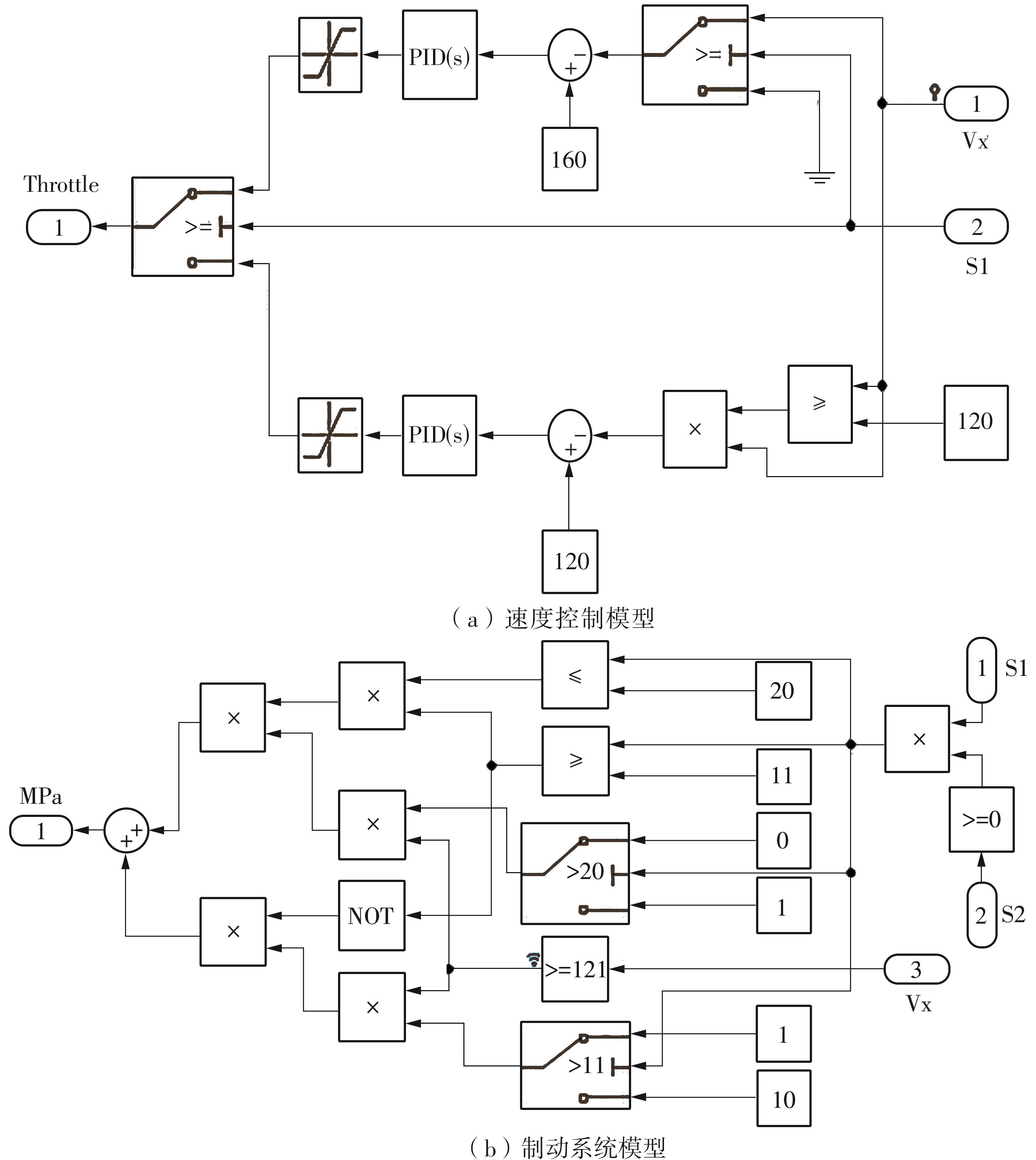
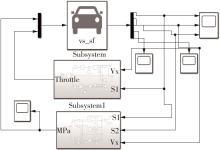
Fig.8
Co-simulation model of CarSim and Simulink"
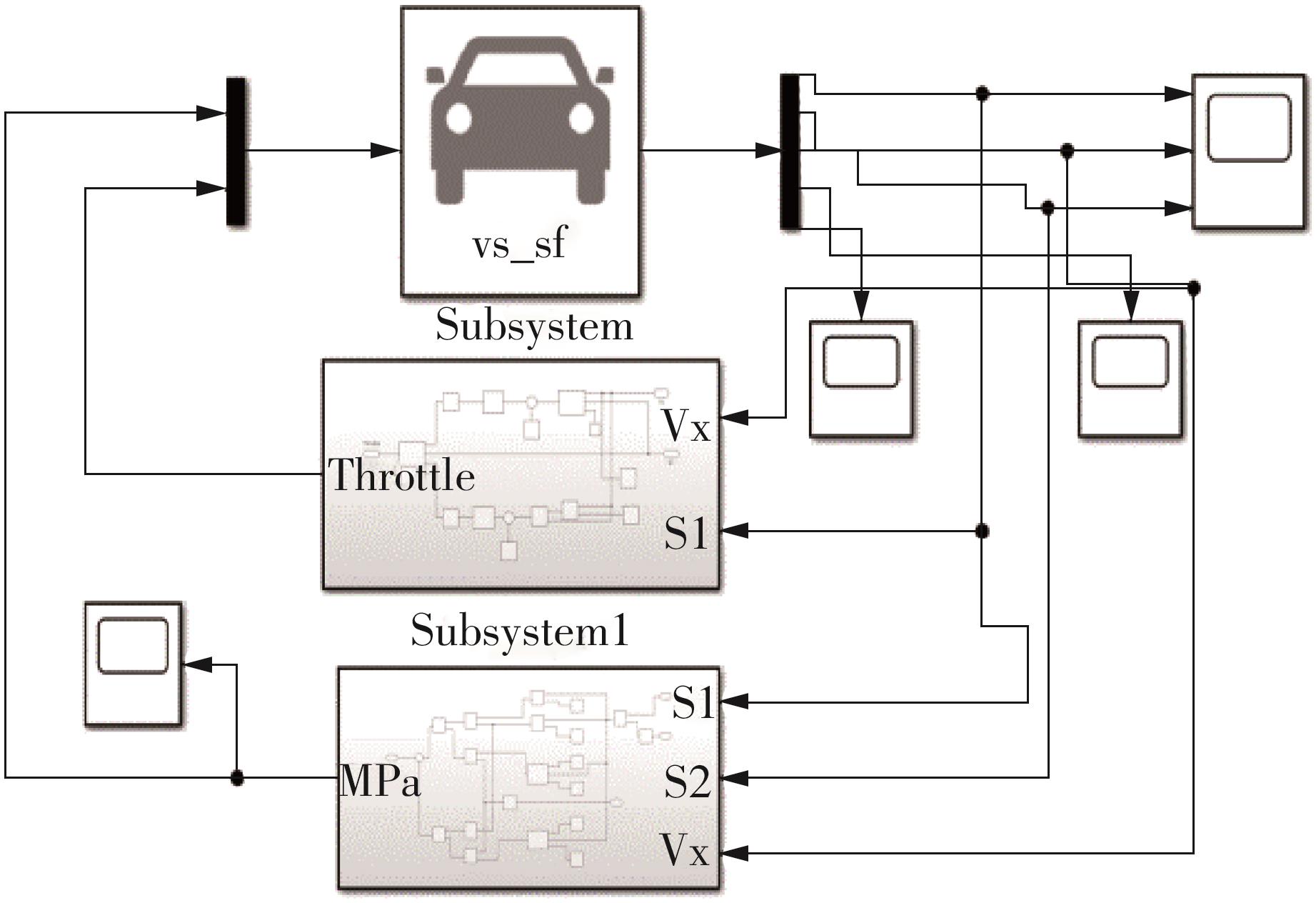

Fig.9
Wheel cylinder pressure changes when the speed of intelligent vehicle is 160 km/h"
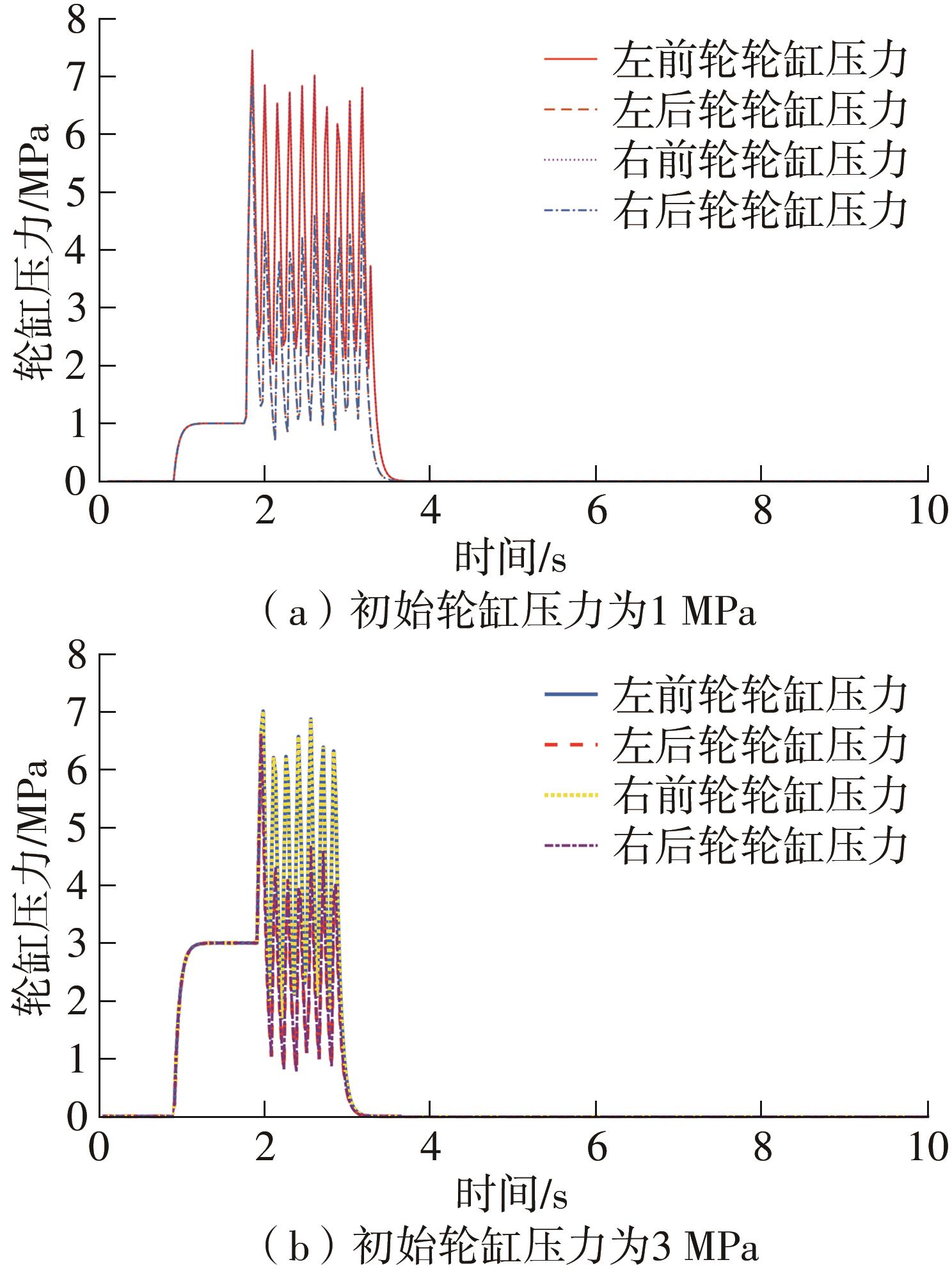
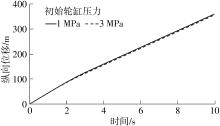
Fig.10
Longitudinal displacement change when braking to avoid collision"
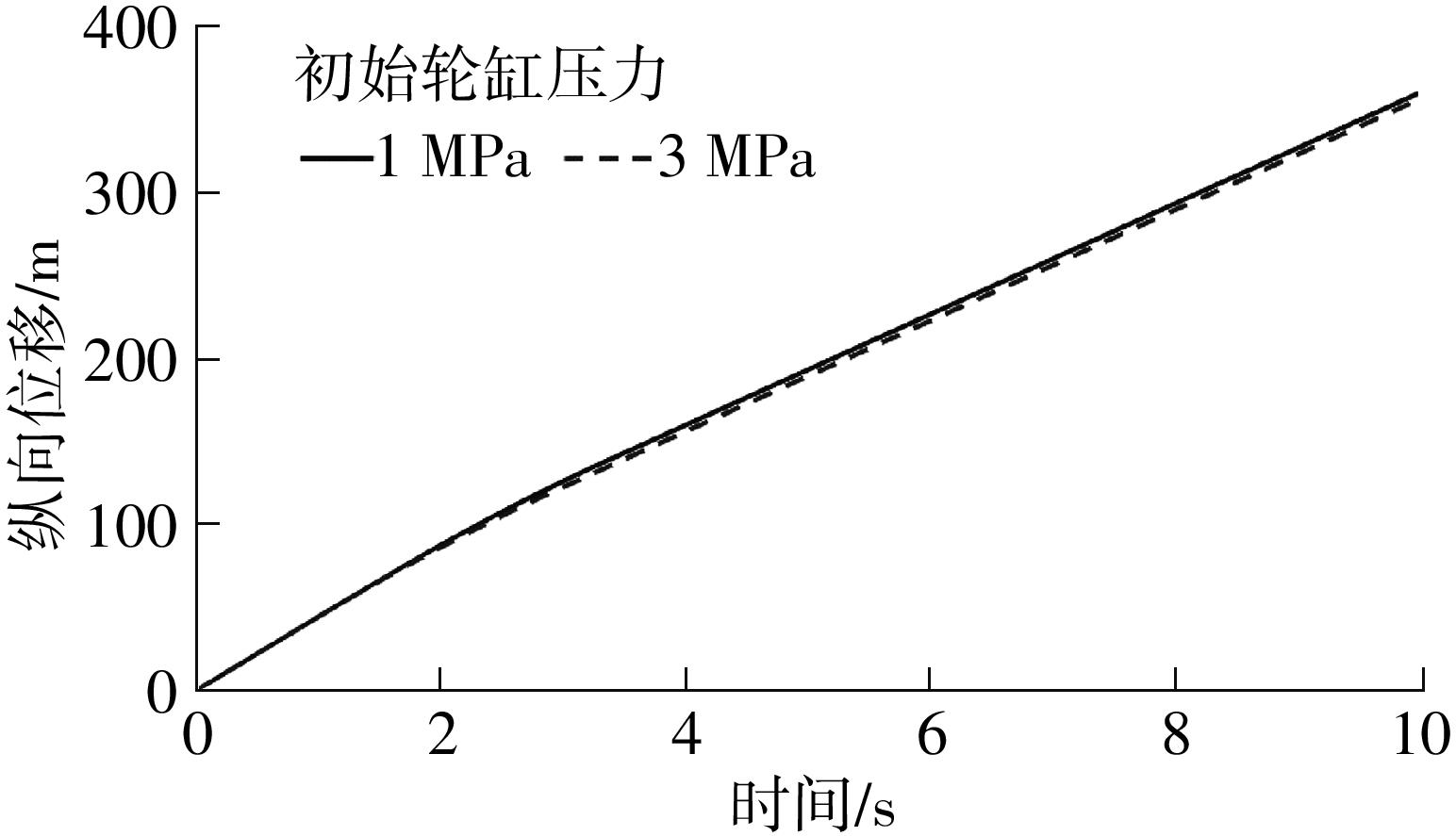

Fig.11
Changes of velocity and spacing"
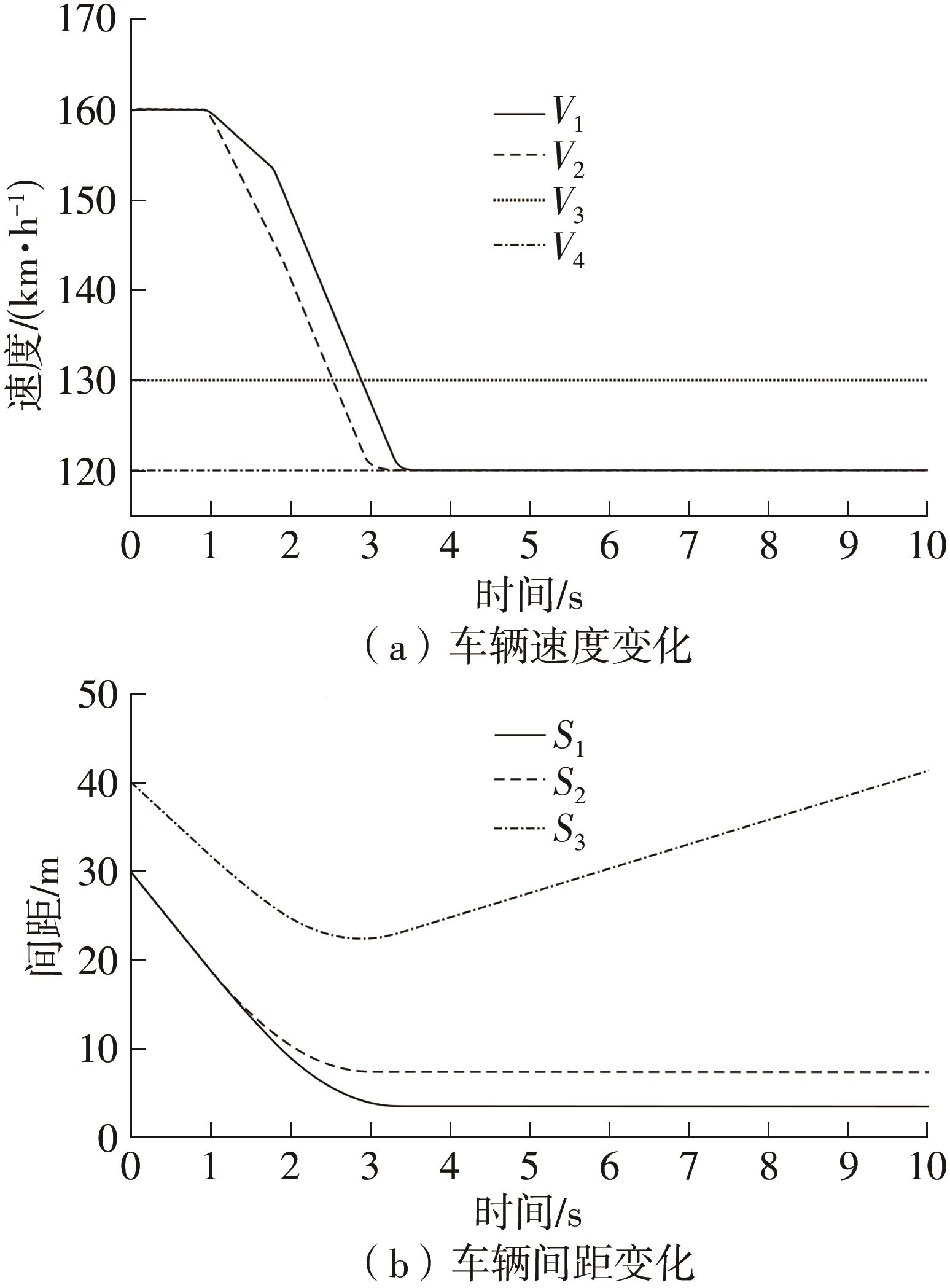
Table 8
Distance between the front suspension of an intelligent car and the rear suspension of the car in front"
| 前车车速/(km·h-1) | 智能车车速/(km·h-1) | 制动前间距/m | S1 MPa/m | S3 MPa/m |
|---|---|---|---|---|
| 100 | 140 | 20 | 3.1 | 7.0 |
| 120 | 160 | 20 | 3.5 | 7.3 |
| 140 | 180 | 20 | 3.8 | 7.7 |
| 1 | 何永明,裴玉龙 .超高速公路发展可行性论证与必要性研究[J].公路,2016,61(1):158-162. |
| HE Yongming, PEI Yulong .Feasibility demonstration and necessity analysis on superhighway [J].Highway,2016,61(1):158-162. | |
| 2 | YOUNES M B, BOUKERCHE A .Safety and efficiency control protocol for highways using intelligent vehicular networks [J].Computer Networks,2019,152:1-11. |
| 3 | 林国庆,逯超,韩龙飞,等. 智能网联汽车主动制动避撞算法联合仿真 [J].计算机技术与发展,2021,31(7):1-6. |
| LIN Guoqing, LU Chao, HAN Longfei,et al .Co-simulation of active braking and collision avoidance algorithm for intelligent connected vehicles [J].Computer Technology and Development,2021,31(7):1-6. | |
| 4 | 何永明,裴玉龙,冉斌 .基于智能路钮的超高速公路虚拟轨道系统研究 [J].交通运输系统工程与信息,2020,20(2):55-60,75. |
| HE Yongming, PEI Yulong, RAN Bin .Superhighway virtual track system based on intelligent road button [J].Journal of Transportation Systems Engineering and Information Technology,2020,20(2):55-60,75. | |
| 5 | HE Y M, SONG Y T, PEI Y L,et al .Theoretical research on longitudinal profile design of superhighways [J].Journal of Advanced Transportation,2020,20(1):1-14. |
| 6 | HE Y M, KANG J, PEI Y L,et al .Research on influencing factors of fuel consumption on superhighway based on DEMATEL-ISM model [J].Energy Policy,2021,158(11):1-10. |
| 7 | 刘展行 .超级高速公路设计初探 [J].公路交通科技(应用技术版),2018,14(11):260-262. |
| LIU Zhanhang .Preliminary study on superhighway design [J].Journal of Highway and Transportation Research and Development(Application Technology),2018,14(11):260-262. | |
| 8 | 赵酉超,毛红日,刘江东 .超高速公路安全平曲线半径研究 [J].西部交通科技,2019(2):159-163. |
| ZHAO Youchao, MAO Hongri, LIU Jiangdong .Study on safety curve radius of superhighway[J].Western Traffic Science and Technology,2019(2):159-163. | |
| 9 | 廉宇峰,张涛焘,黄嘉南,等 .汽车纵向主动避撞系统的研究现状与展望 [J].计算机应用,2021,41(S1):264-271. |
| LIAN Yufeng, ZHANG Taotao, HUANG Jianan,et al .Research status and prospect of longitudinal active collision avoidance system for vehicles [J].Journal of Computer Applications,2021,41(S1):264-271. | |
| 10 | 汪,殷国栋,耿可可,等 .基于不同紧急工况辨识的车辆主动避撞自适应控制 [J].机械工程学报,2020,56(4):115-124. |
| WANG Yan, YIN Guodong, GENG Keke,et al .Active collision avoidance adaptive control based on identification of different emergency conditions [J].Journal of Mechanical Engineering,2020,56(4):115-124. | |
| 11 | 兰凤崇,刘迎节,陈吉清,等 .可变附着系数路面上的自动紧急制动避撞安全策略研究 [J].汽车工程,2021,43(7):1105-1112. |
| LAN Fengchong, LIU Yingjie, CHEN Jiqing,et al .Research on safety strategy for collision avoidance by automatic emergency braking on a road with varying adhesion coefficient [J].Automotive Engineering,2021,43(7):1105-1112. | |
| 12 | 河香梅 .基于制动转向协同的智能车辆避撞系统研究 [D].哈尔滨:哈尔滨理工大学,2021. |
| 13 | 严利鑫,黄珍,吴超仲,等 .基于危险态势识别的智能车驾驶模式选择 [J].华南理工大学学报(自然科学版),2016,44(8):139-146,154. |
| YAN Li-xin, HUANG Zhen, WU Chao-zhong,et al .Driving mode selection of intelligent vehicles based on risky situation identification [J].Journal of South China University of Technology (Natural Science Edition),2016,44(8):139-146,154. | |
| 14 | 来飞,黄超群 .智能汽车自动紧急转向避撞的跟踪控制方法对比研究 [J].中国公路学报,2021,34(6):250-264. |
| LAI Fei, HUANG Chaoqun. Comparative study on tracking control methods for automatic emergency steering and collision avoidance of intelligent vehicles [J].Chinese Journal of highway,2021,34(6):250-264. | |
| 15 | 孙磊,刘俊,卢明明,等 .汽车主动避撞控制系统研究 [J].机械工程与自动化,2019(5):32-34. |
| SUN Lei, LIU Jun, LU Mingming,et al .Research on active collision avoidance control system for vehicle [J].Mechanical Engineering & Automation,2019(5):32-34. | |
| 16 | 陈吉清,舒孝雄,兰凤崇,等 .典型危险事故特征的自动驾驶测试场景构建[J].华南理工大学学报(自然科学版),2021,49(5):1-8. |
| CHEN Jiqing, SHU Xiaoxiong, LAN Fengchong,et al .Construction of autonomous vehicles test scenarios with typical dangerous accident characteristics[J].Journal of South China University of Technology(Natural Science Edition),2021,49(5):1-8. | |
| 17 | 张驰,胡涛,侯宇迪,等 .基于制动毂温升的连续下坡货车事故风险评价模型[J].华南理工大学学报(自然科学版),2020,48(11):19-29. |
| ZHANG Chi, HU Tao, HOU Yudi,et al .Crash risk evaluation model based on brake heating for trucks under continuous downhill road conditions[J].Journal of South China University of Technology(Natural Science Edition),2020,48(11):19-29. | |
| 18 | 贺伊琳,马建,赵轩,等 .基于小波控制的电动汽车稳定性研究 [J].中国公路学报,2018,31(11):214-226. |
| HE Yilin, MA Jian, ZHAO Xuan,et al .Research on wavelet control based stability of the electric vehicle [J].Chinese Journal of Highway,2018,31(11):214-226. |
| [1] | HAN Qiang, TANG Ziqi, ZHANG Run, et al. Coupling Thermodynamics Analysis for Ascent Stage of Stratospheric Airship [J]. Journal of South China University of Technology (Natural Science Edition), 2021, 49(5): 9-17,46. |
| [2] | LI Wanrun ZHANG Guangli LIU Yufei FANG Zhao LI Aiqun DU Yongfeng. Welding Residual Stress Simulation and Experimental Verification in Beamto-Column Joints of Q345B Steel [J]. Journal of South China University of Technology(Natural Science Edition), 2019, 47(10): 114-123. |
| [3] | ZHANG Kaisheng LIU Haotian WANG Qiang ZHANG Baocheng. Optimization of Multi-Organism Cooperative Propulsion Efficiency of Bionic Thunniform Fish Robot [J]. Journal of South China University of Technology (Natural Science Edition), 2018, 46(7): 109-115,122. |
| [4] |
FENG Hao DU Qungui SUN Youping.
Transient Dynamics Analysis for the Structures of the Excavator Based on Sub-Modeling Method
|
| [5] | ZHANG Wen-ming HAN Hong-bing YANG Jue YI Xiao. A Neural Network-Based Autonomous Articulated Vehicle System Considering Driver Behavior [J]. Journal of South China University of Technology (Natural Science Edition), 2016, 44(12): 74-80. |
| [6] | WU Shang-sheng LIN Wang-yang DAI Shui-wen. Dynamic Characteristics of Automatic-Centering Rotary Platform for Cars and Its Simulation [J]. Journal of South China University of Technology (Natural Science Edition), 2016, 44(12): 23-29. |
| [7] | Zhang Li- bin Yue Hong- wei Liu Yi- cai Li Fu- qi. A Measurement Method of Vehicle Center of Gravity Based on Dynamic Braking Model [J]. Journal of South China University of Technology (Natural Science Edition), 2014, 42(9): 127-133. |
| [8] | Feng Hai- sheng Wang Li- qin Zheng De- zhi Zhao Xiao- li Dai Guang- hao. Analysis on High Power Density Gear Transmission Efficiency Considering Tooth Friction [J]. Journal of South China University of Technology (Natural Science Edition), 2014, 42(9): 24-29. |
| [9] | Zhao Da-xu Chen Bai Wu hong-tao Tian Fu-yang . Dynamic Analysis of Submersible In-Pipe Robot [J]. Journal of South China University of Technology (Natural Science Edition), 2010, 38(8): 66-71. |
| [10] | Xue Yun-feng Du Qun-gui Zhu Jun-peng. Dynamic Analysis of a New Hypocycloid Energy Transformation Mechanism [J]. Journal of South China University of Technology (Natural Science Edition), 2009, 37(7): 79-84. |
| [11] | Chen Guo-rong Yan Ping Peng Jun Deng Ju-li Wang Qi-feng. A Growth-Based Modeling Method of Logistics Network [J]. Journal of South China University of Technology (Natural Science Edition), 2008, 36(5): 24-29,37. |
| [12] | Liu Chao-ying Huang Shi-sheng . Mechatronic Dynamic Model of Submerged Arc Welding with Constant-Current Power Supply [J]. Journal of South China University of Technology (Natural Science Edition), 2008, 36(2): 70-73. |
| [13] | Mo Hai-jun Xie Cun-xi Hu Qing-chun. Vibration Analysis of Explosive Disposal Robot on Uneven Terrain [J]. Journal of South China University of Technology (Natural Science Edition), 2007, 35(3): 56-60. |
| [14] | Tan Guang-xing Li Zhong-hua Mao Zong-yuan. Artificial Immune Algorithm Based on Idiotypic-Network Dynamic Model [J]. Journal of South China University of Technology (Natural Science Edition), 2006, 34(1): 62-65,72. |
| [15] | Li Di Tang Hui Wan Jin-quan Ma Yong-wen. ANN-Based Dynamic M odeling of Wastewater Treatment Process in Paper M aking by W aste Paper [J]. Journal of South China University of Technology (Natural Science Edition), 2005, 33(12): 42-45. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||