Journal of South China University of Technology(Natural Science Edition) ›› 2024, Vol. 52 ›› Issue (4): 104-113.doi: 10.12141/j.issn.1000-565X.230339
• Traffic Safety • Previous Articles Next Articles
Lane-Changing Trajectory Planning Strategy for Autonomous Vehicles on Superhighways
HE Yongming1 XING Wanyu1 WEI Kun2 WU Jiaxuan1
- 1.College of Civil Engineering and Transportation, Northeast Forestry University, Harbin 150040, Heilongjiang, China
2.Key Laboratory of Road Structure and Material Transportation, Chang’an University, Xi’an 710061, Shaanxi, China
-
Received:2023-05-22Online:2024-04-25Published:2023-10-19 -
About author:何永明(1979-),男,博士,副教授,主要从事超高速公路和道路交通仿真研究。E-mail:hymjob@nefu.edu.cn -
Supported by:the Natural Science Foundation of Heilongjiang Province(LH2023E011)
CLC Number:
Cite this article
HE Yongming, XING Wanyu, WEI Kun, et al. Lane-Changing Trajectory Planning Strategy for Autonomous Vehicles on Superhighways[J]. Journal of South China University of Technology(Natural Science Edition), 2024, 52(4): 104-113.
share this article
Table 1
Path planning algorithm classification"
| 类型 | 算法名称 | 适用场景 |
|---|---|---|
| 基于图搜索的算法 | Dijkstra算法、A*算法、D*算法 | 全局路径规划 |
| 基于曲线 插值的算法 | 圆弧与直线、贝塞尔曲线、多项式曲线、样条曲线、微分平坦曲线等 | 局部路径规划 |
| 基于数值 优化的算法 | 利用目标函数和约束对规划问题进行描述和求解 | 局部路径规划 |
| 基于人工 势场的算法 | 人工势场法 | 局部路径规划 |
| 基于采样的算法 | RRT算法、PRM算法和APF算法等 | 全局路径规划 |
| 基于机器 学习的算法 | 模糊逻辑、神经网络、遗传算法和贝叶斯网络等 | 全局、局部路径规划 |
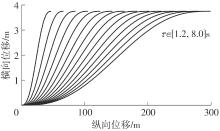
Fig.1
General lane changing trajectory cluster based on quintic polynomials"
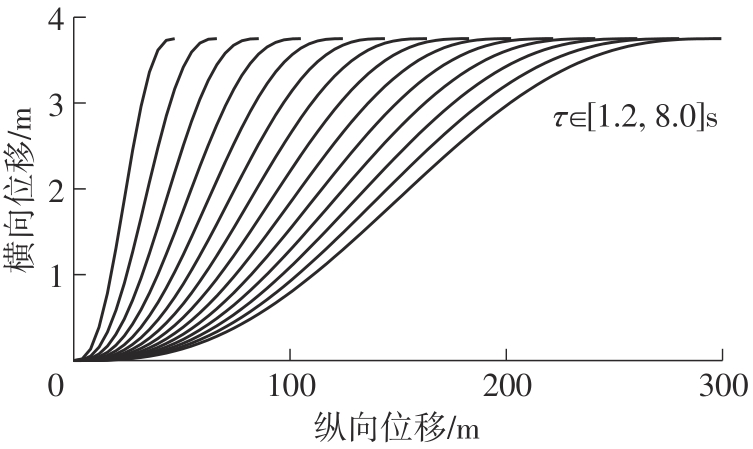

Fig.2
Force analysis of 2DOF vehicle dynamics model"
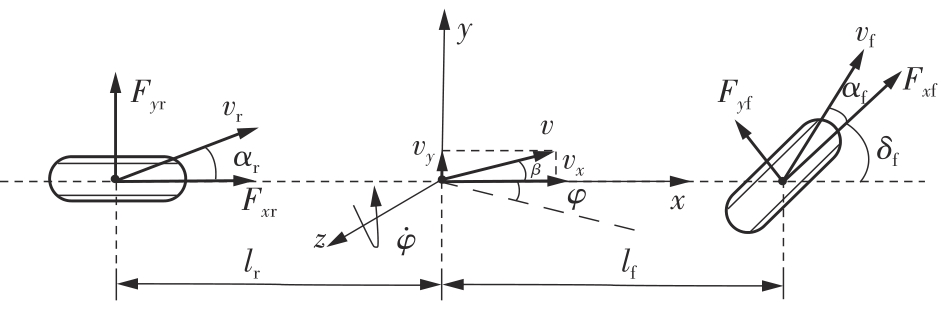
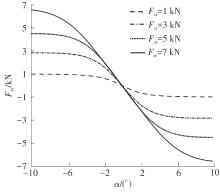
Fig.3
Relationship between tire lateral force and tire slip angle under different loads"
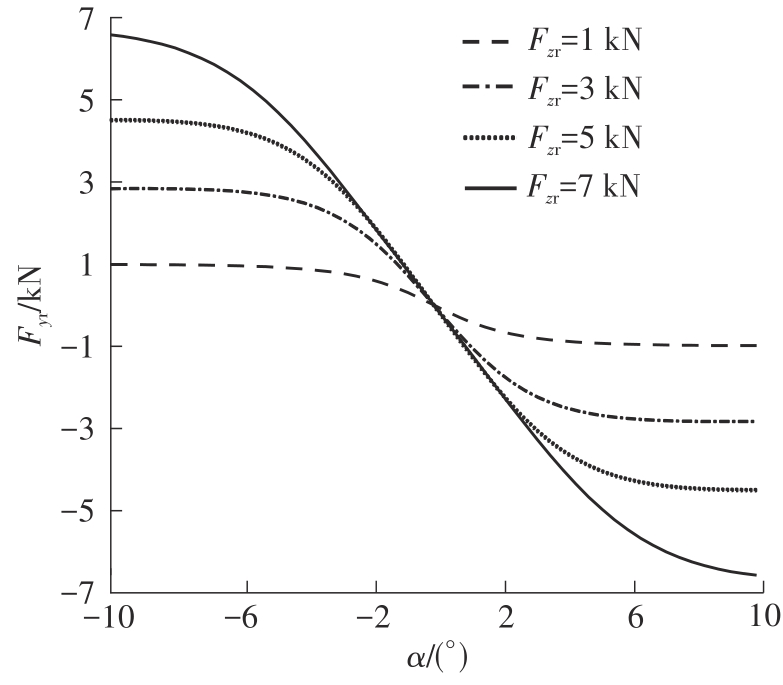
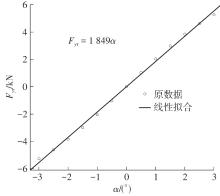
Fig.4
Linear fitting result of Brush tire formula"
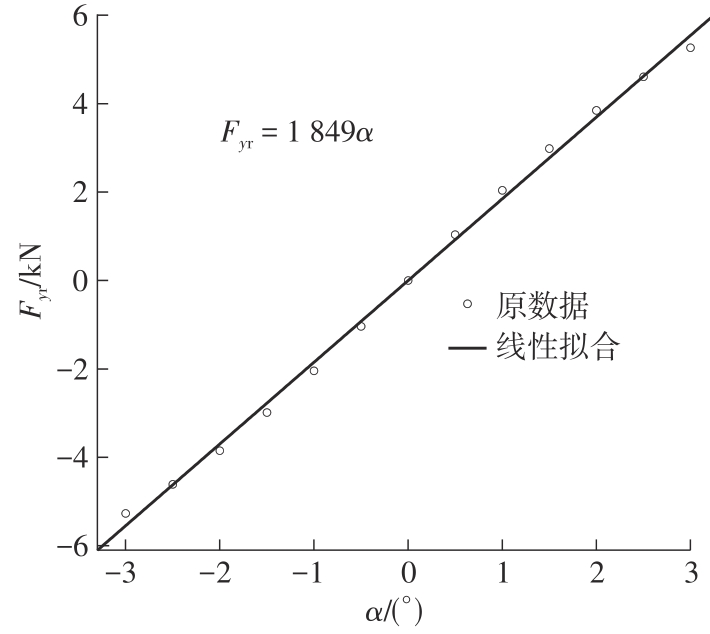
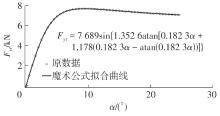
Fig.5
Magic formula fitting result of tire lateral stiffness"
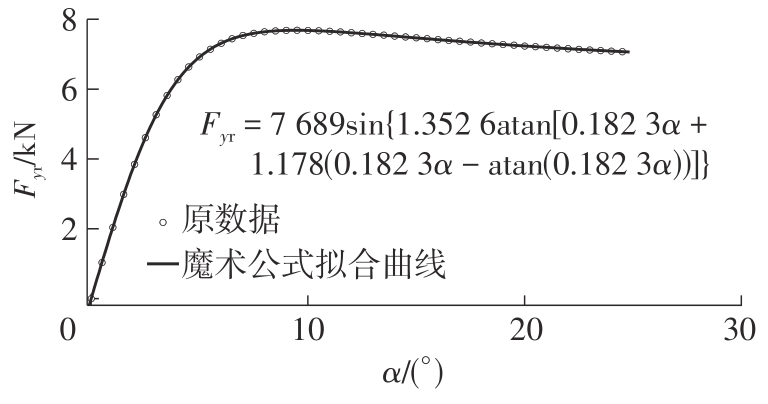

Fig.6
Envelope constraint diagram of yaw of high-speed vehicles"
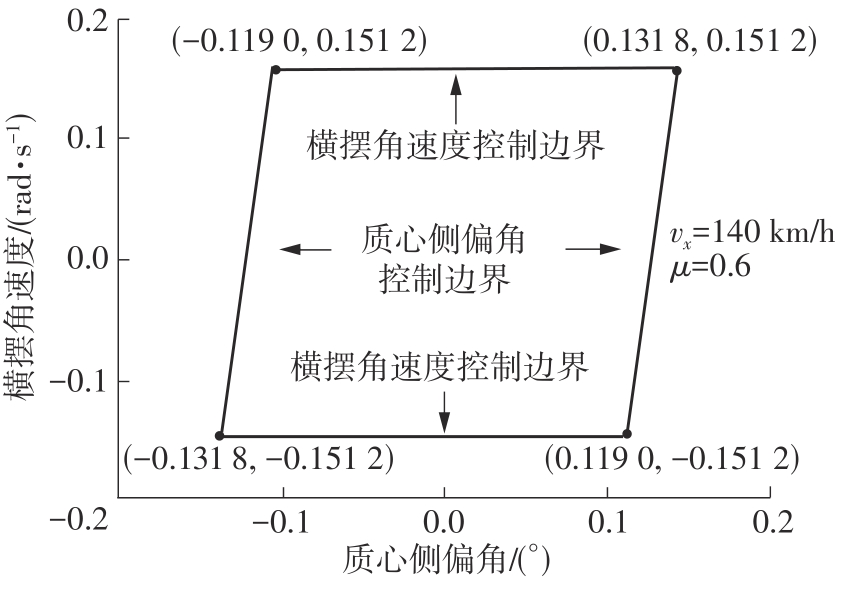
Table 2
Yaw rate threshold under different vehicle speeds and adhesion coefficients"
| 车速/(km·h-1) | 横摆角速度阈值/((º)·s-1) | |||
|---|---|---|---|---|
| μ = 0.4 | μ = 0.6 | μ = 0.8 | μ = 1.0 | |
| 120 | 5.880 0 | 8.820 0 | 11.760 0 | 14.700 0 |
| 130 | 5.427 7 | 8.141 5 | 10.855 4 | 13.569 2 |
| 140 | 5.040 0 | 7.560 0 | 10.080 0 | 12.600 0 |
| 150 | 4.704 0 | 7.056 0 | 9.408 0 | 11.760 0 |
| 160 | 4.410 0 | 6.615 0 | 8.820 0 | 11.025 0 |
| 170 | 5.880 0 | 8.820 0 | 11.760 0 | 14.700 0 |
| 180 | 5.427 7 | 8.141 5 | 10.855 4 | 13.569 2 |
Table 3
τmin under different μ and vx simulation experiments"
| vx /(km·h-1) | τmin/s | |||
|---|---|---|---|---|
| μ = 0.4 | μ = 0.6 | μ = 0.8 | μ = 1.0 | |
| 120 | 2.59 | 2.14 | 1.89 | 1.72 |
| 130 | 2.63 | 2.18 | 1.93 | 1.75 |
| 140 | 2.66 | 2.23 | 1.97 | 1.79 |
| 150 | 2.68 | 2.26 | 2.00 | 1.81 |
| 160 | 2.74 | 2.30 | 2.04 | 1.85 |
| 170 | 2.84 | 2.40 | 2.13 | 1.93 |
| 180 | 2.88 | 2.43 | 2.16 | 1.96 |
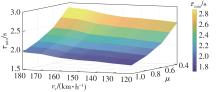
Fig.7
Three dimentional relationshipamong τmin, μ and vx"

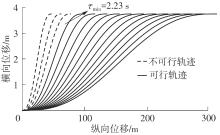
Fig.8
Infeasible trajectories considering vehicle dynamics constraints"


Fig.9
Obstacle vehicle FT lane-changing collision scene"
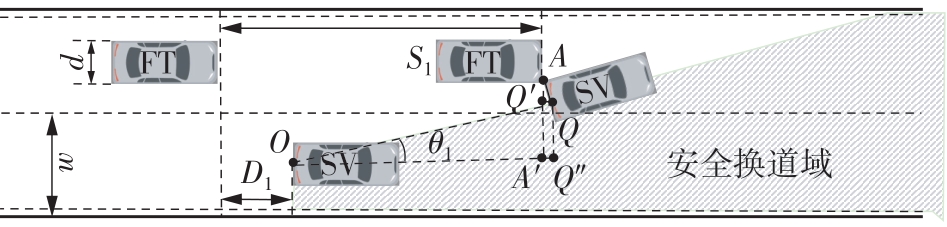

Fig.10
Obstacle vehicle PC lane-changing collision scene"
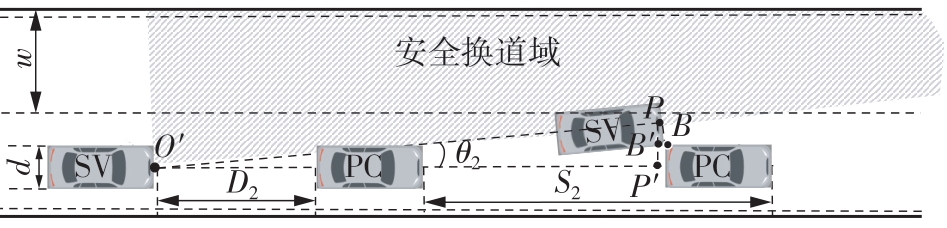
Fig.11
Obstacle vehicle PC+FT lane-changing collision scene"
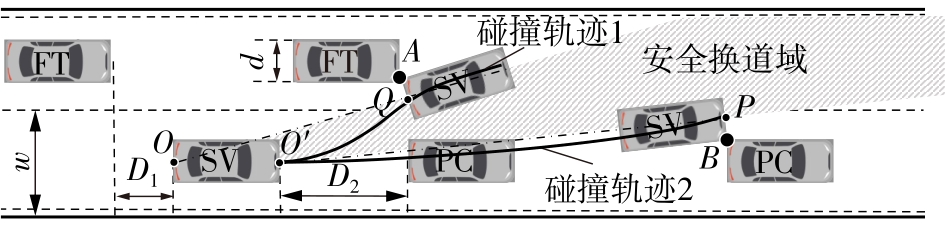
Table 4
Parameters of simulation models"
| 模型 | vSV/(km·h-1) | vFT/(km·h-1) | vPC/(km·h-1) | D1/m | D2/m |
|---|---|---|---|---|---|
| Ⅰ | 140 | 160 | 120 | 40 | 40 |
| Ⅱ | 140 | 160 | 120 | 60 | 60 |
| Ⅲ | 140 | 180 | 100 | 40 | 40 |
| Ⅳ | 140 | 160 | 120 | 100 | 20 |
Table 5
Safe lane-changing time threshold"
| 模型 | ||||
|---|---|---|---|---|
| Ⅰ | 0.48 | 0.97 | 7.20 | 14.30 |
| Ⅱ | 0.72 | 1.45 | 10.80 | 21.45 |
| Ⅲ | 0.45 | 0.91 | 3.60 | 7.15 |
| Ⅳ | 1.20 | 2.42 | 3.60 | 7.15 |

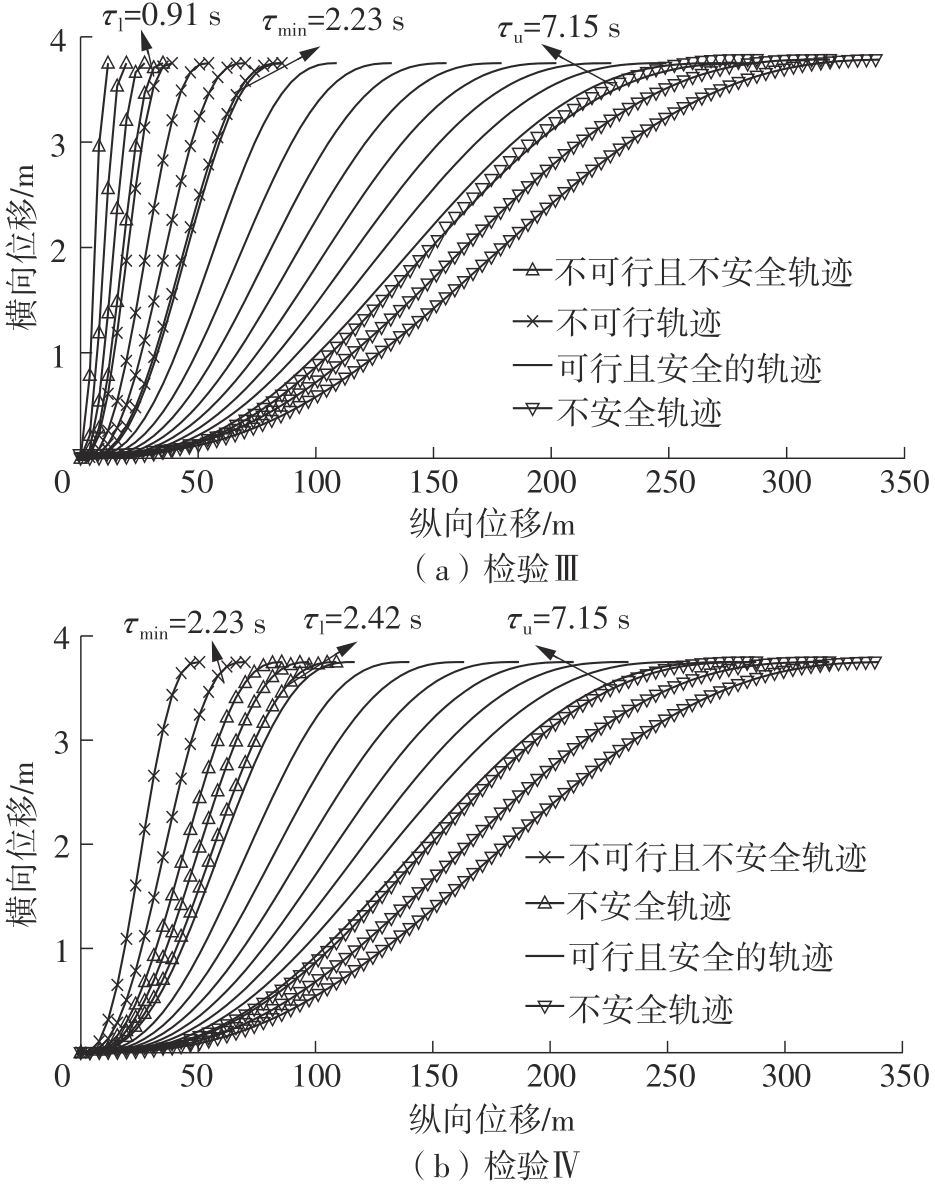
Fig.12
Safe trajectories considering surrounding traffic vehicles"
| 1 | 何永明,裴玉龙 .超高速公路发展可行性论证与必要性研究[J].公路,2016,61(1):158-162. |
| HE Yong-ming, PEI Yu-long .Feasibility demonstration and necessity analysis on superhighway[J].Highway,2016,61(1):158-162. | |
| 2 | National Highway Traffic Safety Administration .Traffic safety facts 2020:a compilation of motor vehicle crash data from the fatality analysis reporting system and the general estimates system[Z].Washington:US Department of Transportation,2020. |
| 3 | 陆建,李英帅 .车辆换道行为建模的回顾与展望[J].交通运输系统工程与信息,2017,17(4):48-55. |
| LU Jian, LI Ying-shuai .Review and outlook of modeling of lane changing behavior[J].Journal of Transportation Systems Engineering and Information Technology,2017,17(4):48-55. | |
| 4 | 何永明,裴玉龙 .基于出行费用的超高速公路经济性评价[J].公路,2018,63(1):117-123. |
| HE Yong-ming, PEI Yu-long .Economic evaluation of superhighways based on travel cost[J].Highway,2018,63(1):117-123. | |
| 5 | HE Y, KANG J, PEI Y,et al .Research on influencing factors of fuel consumption on superhighway based on DEMATEL-ISM model[J].Energy Policy,2021,158:112545/1-10. |
| 6 | 何永明,冯佳,权聪,等 .基于联合仿真的超高速公路车辆制动避撞系统[J].华南理工大学学报(自然科学版),2022,50(10):19-28. |
| HE Yongming, FENG Jia, QUAN Cong,et al .Braking collision avoidance system for vehicles driving on superhighway based on co-simulation[J].Journal of South China University of Technology (Natural Science Edition),2022,50(10):19-28. | |
| 7 | 何永明,权聪,魏堃,等 .超高速公路车路协同路侧单元感知融合方法研究[J].吉林大学学报(工学版),(2023-01-18).Doi:10.13229/i.cnkijidxbaxb20221225 . |
| HE Yongming, QUAN Cong, WEI Kun,et al .Research on the perception fusion method of roadside units for vehicle road collaboration on superhighways[J].Journal of Jilin University (Engineering Edition),(2023-01-18).Doi:10.13229/i.cnkijidxbaxb 20221225 . | |
| 8 | ZUO Z, YANG X, LI Z,et al .MPC-based cooperative control strategy of path planning and trajectory tracking for intelligent vehicles[J].IEEE Transactions on Intelligent Vehicles,2021,6(3):513-522. |
| 9 | 孙秦豫,付锐,王畅,等 .人机协作系统中车辆轨迹规划与轨迹跟踪控制研究[J].中国公路学报,2021,34(9):146-160. |
| SUN Qin-yu, FU Rui, WANG Chang,et al .Vehicle trajectory-planning and trajectory-tracking control in human-autonomous collaboration system[J].China Journal of Highway and Transport,2021,34(9):146-160. | |
| 10 | 赵奉奎,葛振,董锋威,等 .基于改进人工势场法的智能汽车轨迹规划算法研究[J].重庆交通大学学报(自然科学版),2022,41(11):153-160. |
| ZHAO Fengkui, GE Zhen, DONG Fengwei,et al .Intelligent vehicle trajectory planning algorithm based on improved artificial potential field method[J].Journal of Chongqing Jiaotong University (Natural Science),2022,41(11):153-160. | |
| 11 | 胡杰,张志豪,陈瑞楠,等 .基于改进混合A*的智能汽车时空联合规划方法[J].汽车工程,2023,45(7):1123-1133. |
| HU Jie, ZHANG Zhihao, CHEN Ruinan,et al .Spatio-temporal joint planning method for intelligent vehicles based on improved hybrid A*[J].Automotive Engineering,2023,45(7):1123-1133. | |
| 12 | 高锋,冯德福,胡秋霞 .面向NMPC运动规划系统的数值优化加速技术[J].汽车工程,2023,45(8):1438-1447,1497. |
| GAO Feng, FENG Defu, HU Qiuxia .Accelerating technologies of numerical optimization for motion planning designed by nonlinear model predictive control [J].Automotive Engineering,2023,45(8):1438-1447,1497. | |
| 13 | ZHOU J, ZHENG H, WANG J,et al .Multiobjective optimization of lane-changing strategy for intelligent vehicles in complex driving environments[J].IEEE Transactions on Vehicular Technology,2020,69(2):1291-1308. |
| 14 | YANG D, ZHENG S, WEN C,et al .A dynamic lane-changing trajectory planning model for automated vehicles[J].Transportation Research Part C:Emerging Technologies,2018,95:228-247. |
| 15 | 牛国臣,李文帅,魏洪旭 .基于双五次多项式的智能汽车换道轨迹规划[J].汽车工程,2021,43(7):978-986,1004. |
| NIU Guochen, LI Wenshuai, WEI Hongxu .Intelligent vehicle lane changing trajectory planning based on double quintic polynomials[J].Automotive Engineering,2021,43(7):978-986,1004. | |
| 16 | 宋洁,张小俊,张云龙 .智能汽车换道避障路径规划与跟踪控制[J].现代制造工程,2022(10):43-50,20. |
| SONG Jie, ZHANG Xiaojun, ZHANG Yunlong .Path planning and tracking control for intelligent vehicles changing lanes to avoid obstacles[J].Modern Manufacturing Engineering,2022(10):43-50,20. | |
| 17 | 黄晶,蓟仲勋,彭晓燕,等 .考虑驾驶人风格的换道轨迹规划与控制[J].中国公路学报,2019,32(6):226-239,247. |
| HUANG Jing, JI Zhongxun, PENG Xiaoyan,et al .Lane changing trajectory planning and control considering driver style[J].China Journal of Highway and Transport,2019,32(6):226-239,247. | |
| 18 | 何永明,裴玉龙 .超高速公路设计及运行特性研究[M].北京:科学出版社,2020. |
| 19 | PACEJKA H .Tire and vehicle dynamics[M].2nd ed.New York:Elsevier,2006:101-117. |
| 20 | BEAL C E, GERDES J C .Model predictive control for vehicle stabilization at the limits of handling[J].IEEE Transactions on Control Systems Technology,2013,21(4):1258-1269. |
| 21 | ERLIEN S M, FUJITA S, GERDES J C .Shared steering control using safe envelopes for obstacle avoidance and vehicle stability[J].IEEE Transactions on Intelligent Transportation Systems,2016,17(2):441-451. |
| [1] | XIE Hui, SHEN Gang, LIU Dong, et al. Braking Transient Impact Suppression Strategy for Single Rope Winding Mine Hoist [J]. Journal of South China University of Technology(Natural Science Edition), 2024, 52(3): 141-150. |
| [2] | CAO Ningbo, ZHAO Liying. Management Method of Autonomous Vehicles and Pedestrians at Intersections Based on Maximum Pressure Controls [J]. Journal of South China University of Technology(Natural Science Edition), 2024, 52(2): 124-135. |
| [3] | CHEN Peng, JIANG Yongqi, YU Tianwei, et al. Quadrotor Trajectory Planning Method Based on Local Soft-Constrained Optimization [J]. Journal of South China University of Technology(Natural Science Edition), 2022, 50(6): 27-36. |
| [4] | HE Yongming, FENG Jia, QUAN Cong, et al. Braking Collision Avoidance System for Vehicles Driving on Superhighway Based on Co-simulation [J]. Journal of South China University of Technology(Natural Science Edition), 2022, 50(10): 19-28. |
| [5] | ZENG Dequan, YU Zhuoping, XIONG Lu, et al. Intelligent Vehicle Obstacle Avoidance Trajectory Planning in Structured Road Based on Analytic Hierarchy Process [J]. Journal of South China University of Technology (Natural Science Edition), 2020, 48(7): 65-75. |
| [6] | TIAN Sheng, XU Kai, ZHU Zekun, et al. Day-to-Day Evolution Model of Road-Network Mixed Traffic Flow in Autonomous Driving Environment [J]. Journal of South China University of Technology (Natural Science Edition), 2020, 48(4): 123-131. |
| [7] | YANG Jinming HUANG Xiuxiu CHEN Yuanrui XIE Zekun. Subsection Control of Wave Power Generation System Based on Trajectory Planning [J]. Journal of South China University of Technology(Natural Science Edition), 2019, 47(9): 33-39. |
| [8] | LIU Huasen CHENG Wenming LI Yinqi . Trajectory Planning for Crane's Trolley to Suppress Residual Swing of Payload [J]. Journal of South China University of Technology (Natural Science Edition), 2018, 46(9): 17-23. |
| [9] | FAN Li LI Gang-yan CHEN Ran HU Da-wei ZHAO Li MENG Li-hang. Calculation of Lateral Force Coefficient and Turning Radius for Bus Cornering Stability Under Extreme Turn Conditions [J]. Journal of South China University of Technology (Natural Science Edition), 2017, 45(2): 39-45,51. |
| [10] | Zhao Jie Zhang He Liu Yu-bin Chen Fu. Development and Walking Experiment of Hexapod Robot HITCR-I [J]. Journal of South China University of Technology(Natural Science Edition), 2012, 40(12): 17-23. |
| [11] | Gan Zhi-gang Xiao Nan-feng. Design and Implementation of Virtual Teaching System for Humanoid Robot [J]. Journal of South China University of Technology (Natural Science Edition), 2008, 36(1): 18-24. |
| [12] | Liu Kai Zhao Dong-biao Huang Pei-jian. Planning of Generating Motion Trajectory in NC Machining of Spiral Bevel Gear [J]. Journal of South China University of Technology (Natural Science Edition), 2007, 35(8): 32-37. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||