Journal of South China University of Technology(Natural Science Edition) ›› 2023, Vol. 51 ›› Issue (1): 8-15.doi: 10.12141/j.issn.1000-565X.220089
Special Issue: 2023年机械工程
• Mechanical Engineering • Previous Articles Next Articles
Design and Experimental Research of Hydraulically Driven Bionic Venus Flytrap Flexible Gripper
LI Jian1 WANG Yuhan1 WANG Yangwei1 DAI Chuyan2 LUAN Zhibo1
- 1.School of Mechanical Engineering,Northeast Forestry University,Harbin 150040,Heilongjiang,China
2.School of Mechanical Engineering,Harbin Institute of Technology,Harbin 150006,Heilongjiang,China
-
Received:2022-02-28Online:2023-01-25Published:2023-01-02 -
Contact:李健(1985-),男,博士,教授,主要从事机器人技术研究。 E-mail:lijian499@163.com -
About author:李健(1985-),男,博士,教授,主要从事机器人技术研究。 -
Supported by:the National Natural Science Foundation of China(51905084);the Natural Science Foundation of Heilongjiang Province(LH2019E008)
CLC Number:
Cite this article
LI Jian, WANG Yuhan, WANG Yangwei, et al. Design and Experimental Research of Hydraulically Driven Bionic Venus Flytrap Flexible Gripper[J]. Journal of South China University of Technology(Natural Science Edition), 2023, 51(1): 8-15.
share this article

Fig.1
Venus flytrap"
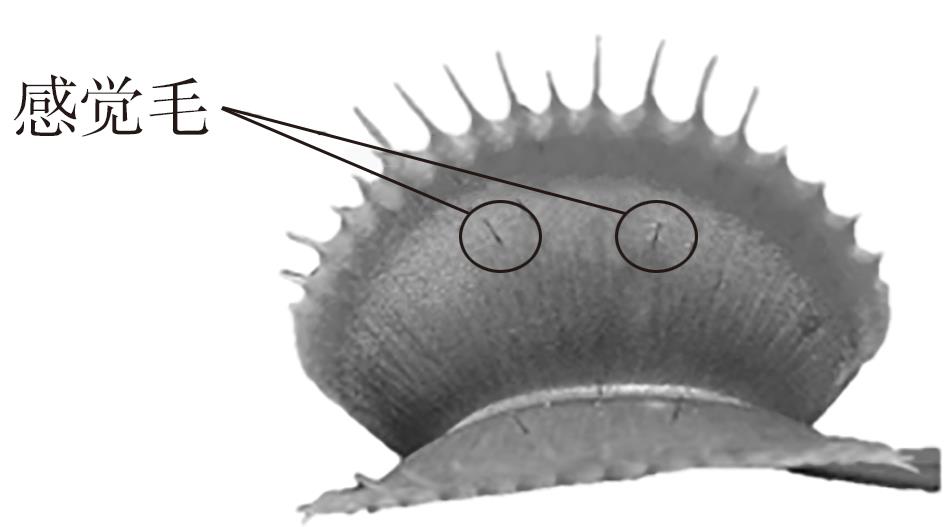
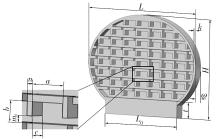
Fig.2
Strurcture of bionic blade"
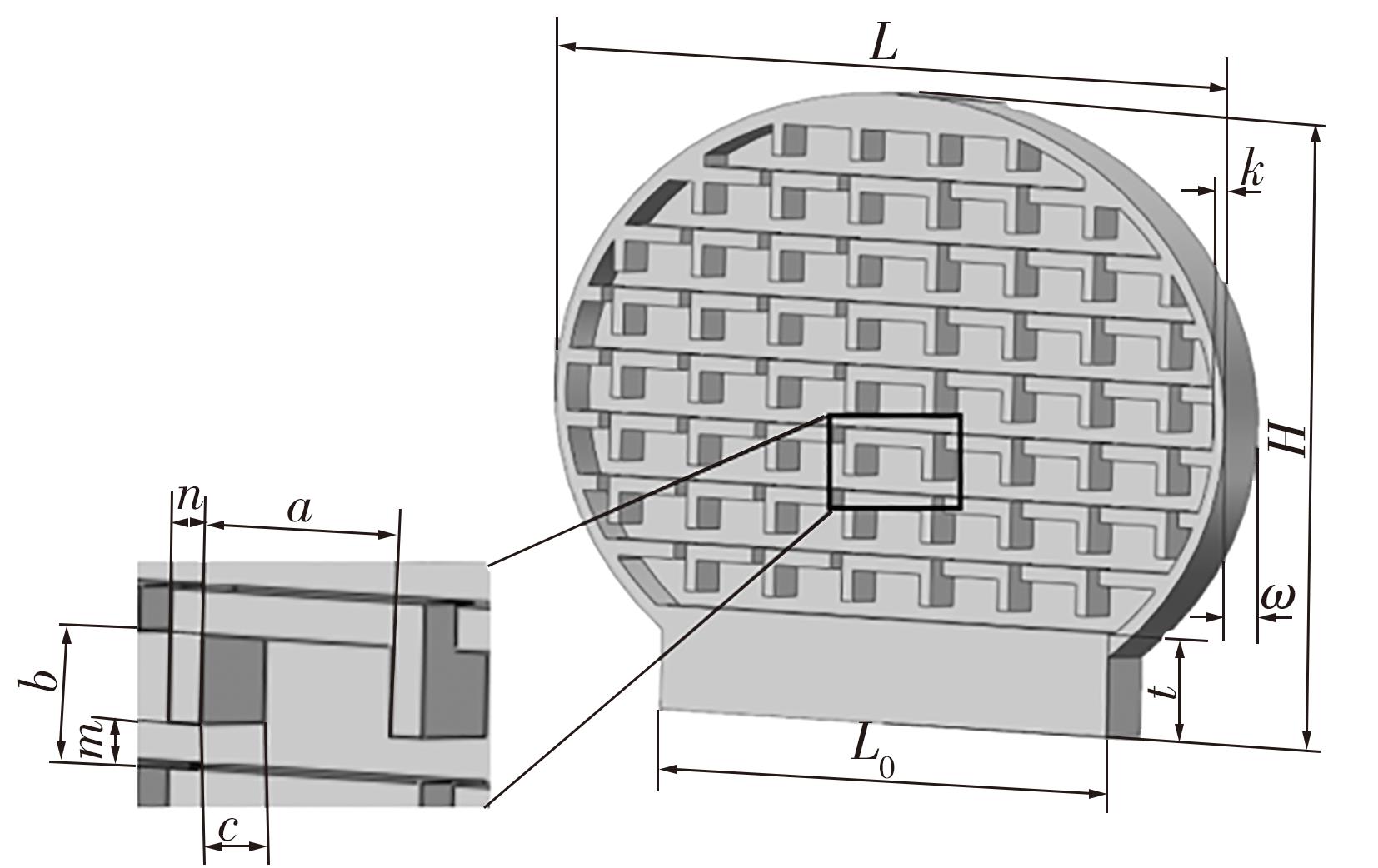
Table 1
Structural parameters of bionic blade"
| 结构参数 | 数值 | 结构参数 | 数值 |
|---|---|---|---|
| 底边L0 | 80 | 连接层宽度n | 2 |
| 总长度(长轴)L | 120 | 底边壁厚t | 13 |
| 短轴g | 80 | 侧壁厚k | 2 |
| 总厚度ω | 8 | 网格长度a | 12 |
| 总高度H | 80 | 网格宽度b | 6 |
| 流道宽度m | 2 | 网格高度c | 4 |
| 壁厚A | 2 |

Fig.3
Production process and prototype of bionic blade"
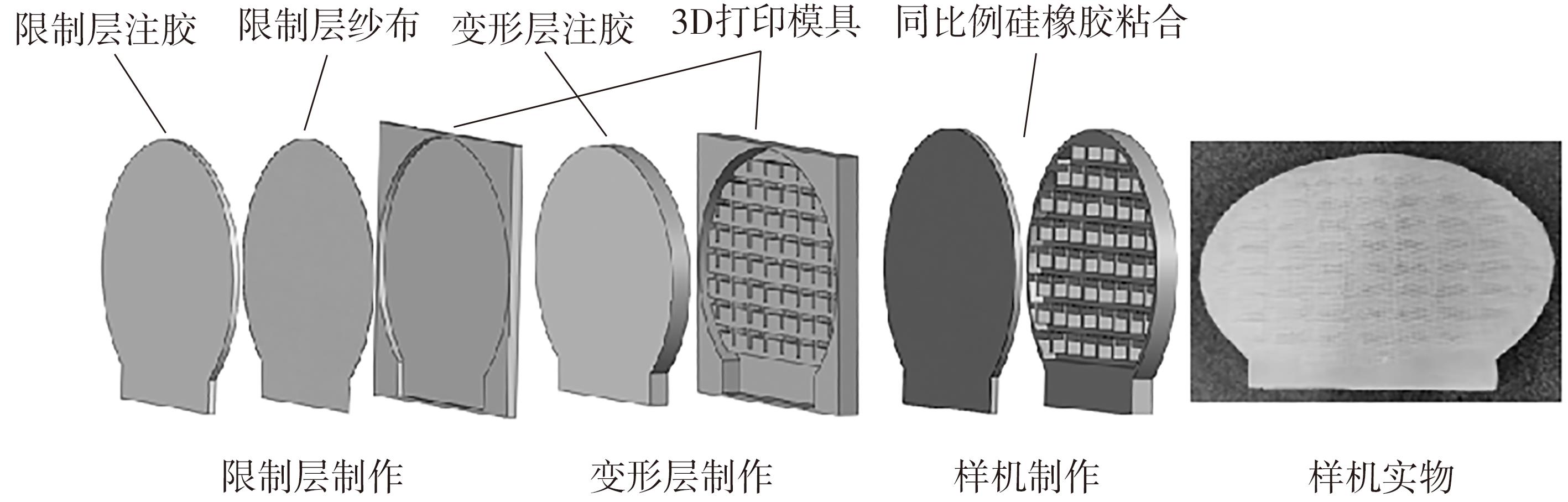
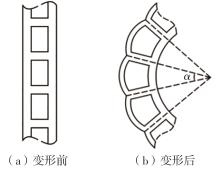
Fig.4
Schematic diagram of the deformation of single-column grid"
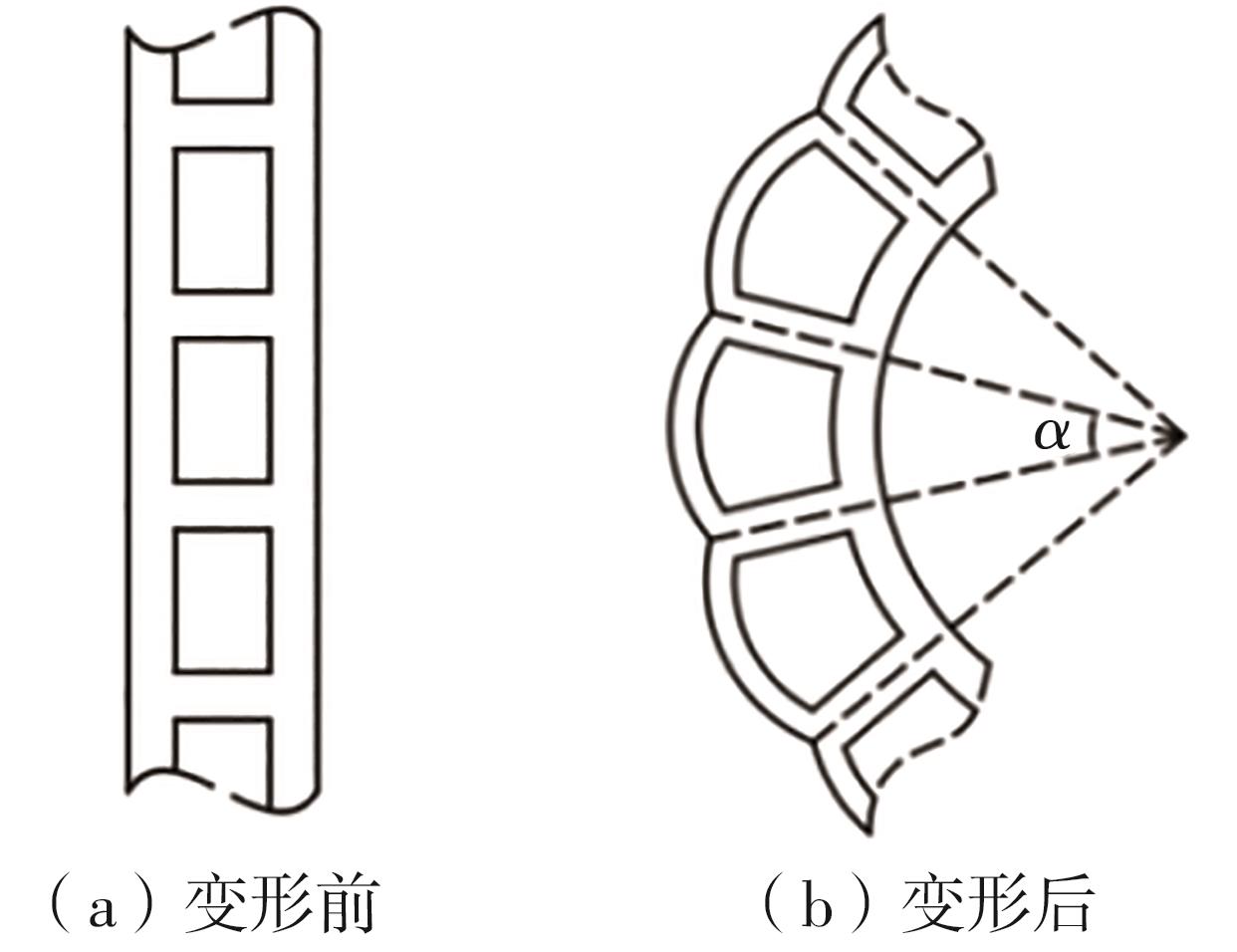
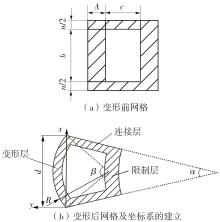
Fig.5
Schematic diagram of the deformation of a single grid"
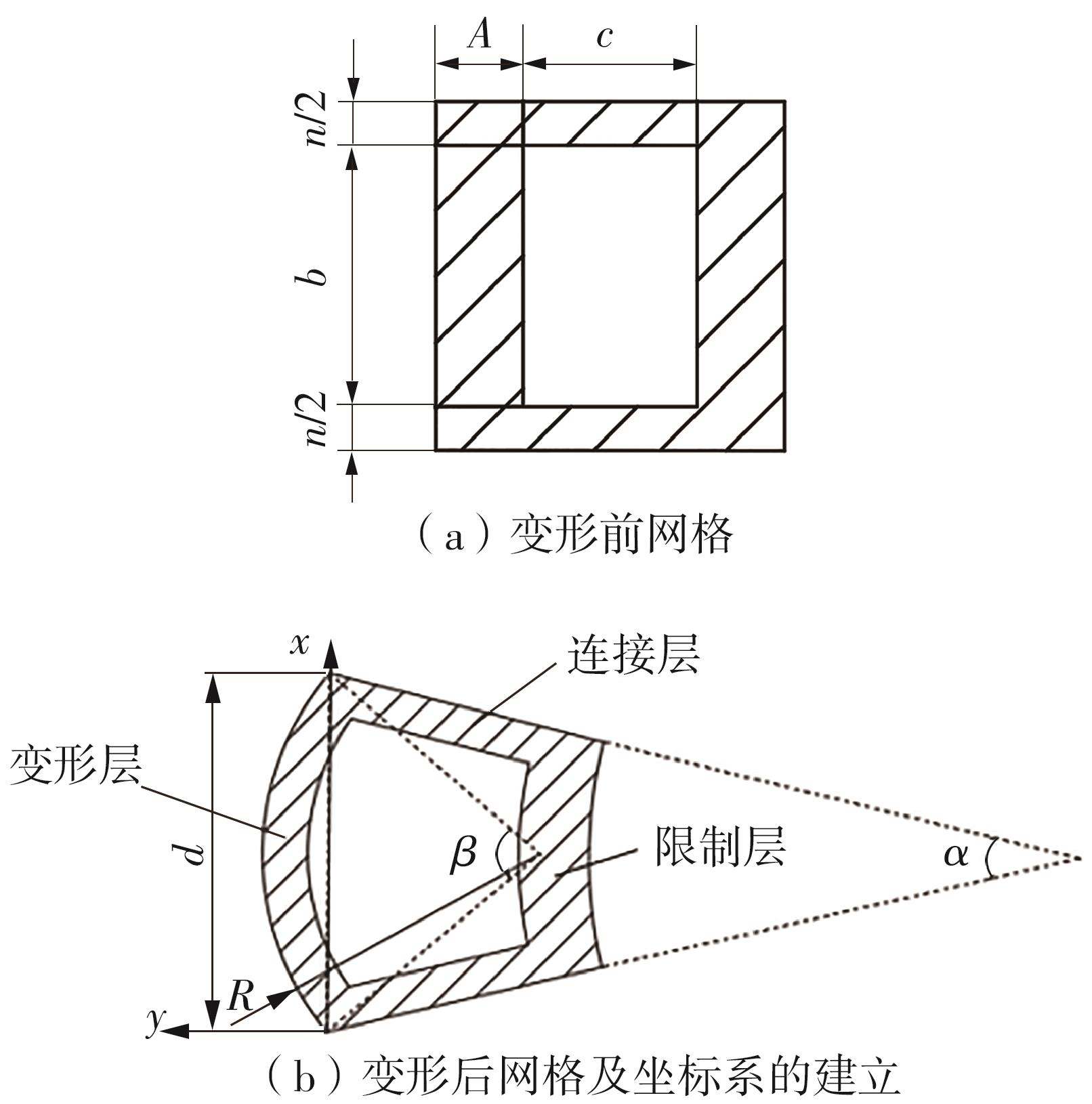
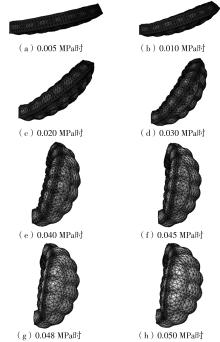
Fig.6
Simulation results of bionic blade at different pressures"
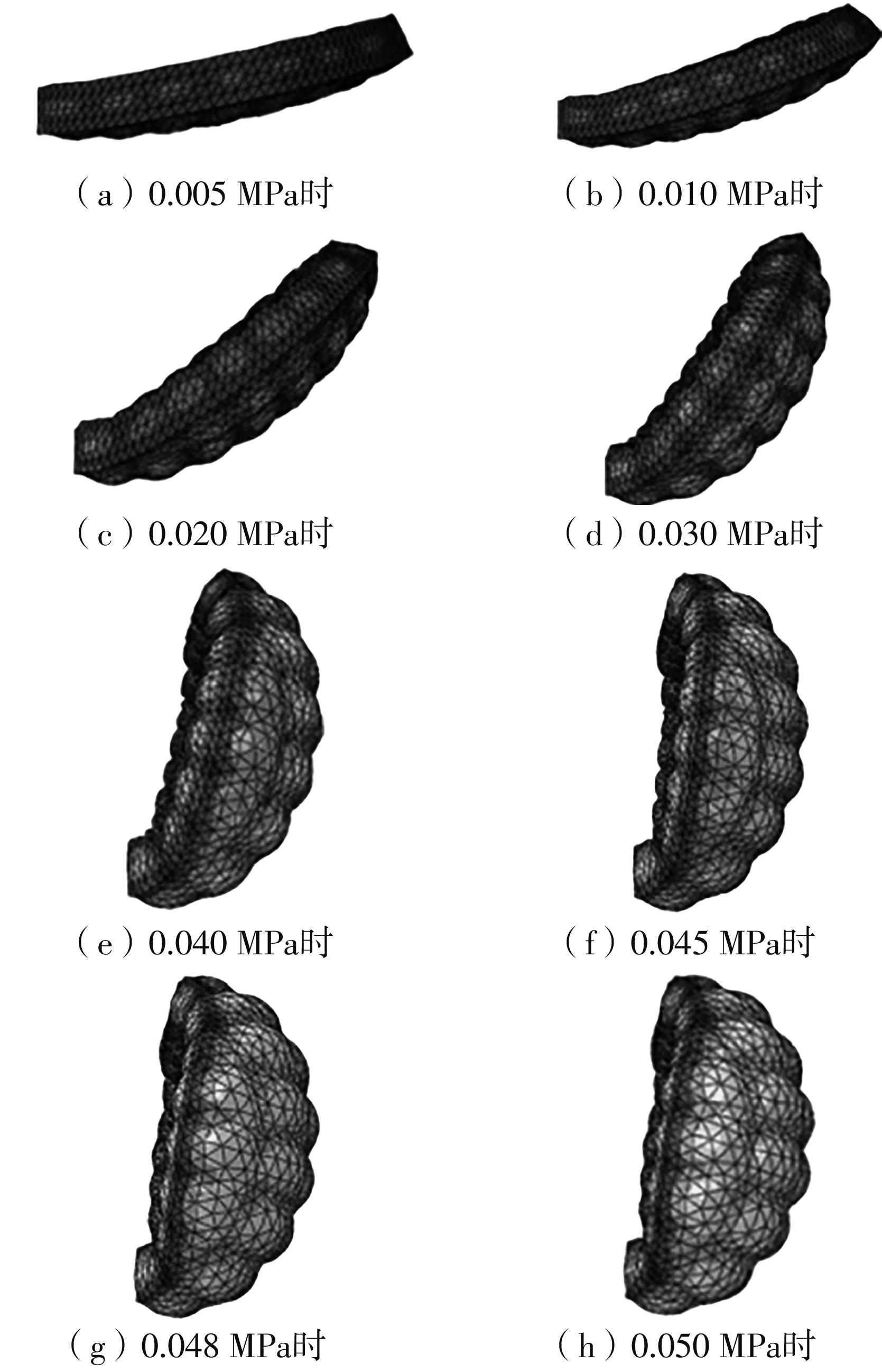
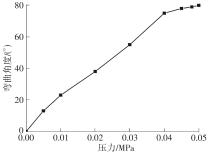
Fig.7
Bending angle of bionic blade"
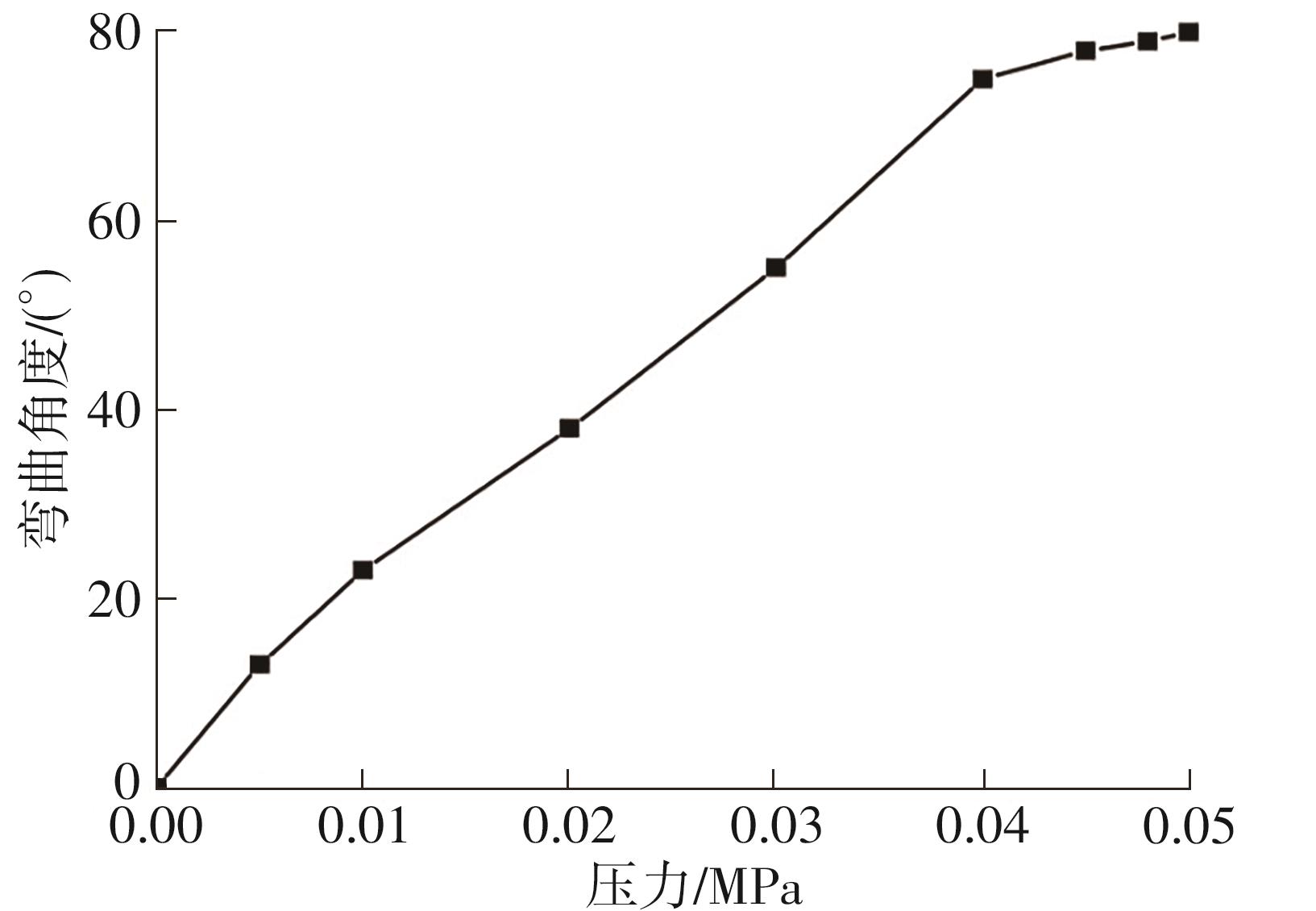
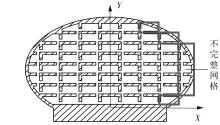
Fig.8
Schematic diagram of incomplete grids"
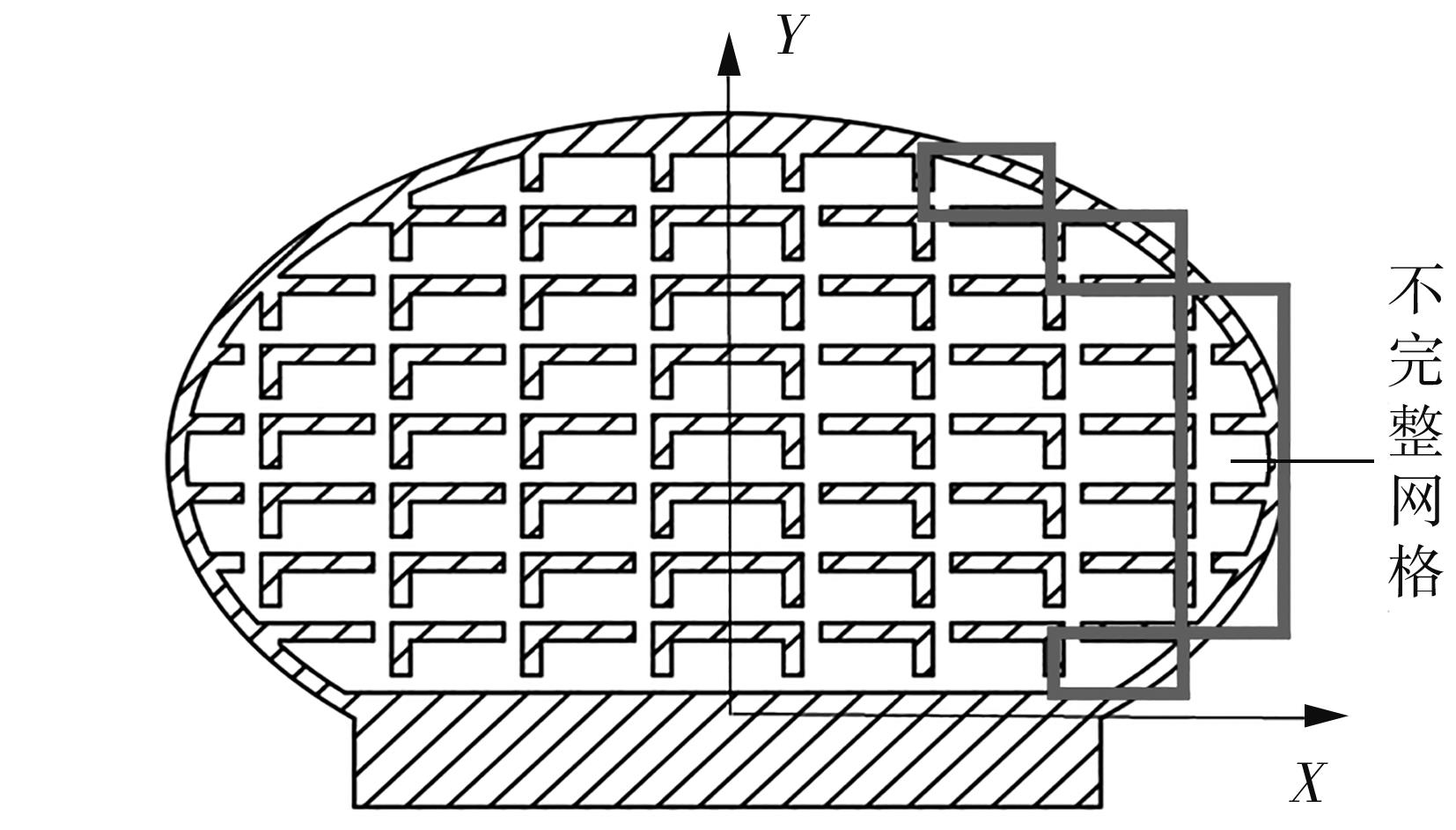
Fig.9
Plot of bending trajactory"
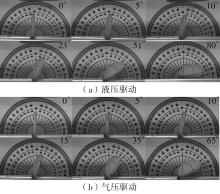
Fig.10
Bending test"
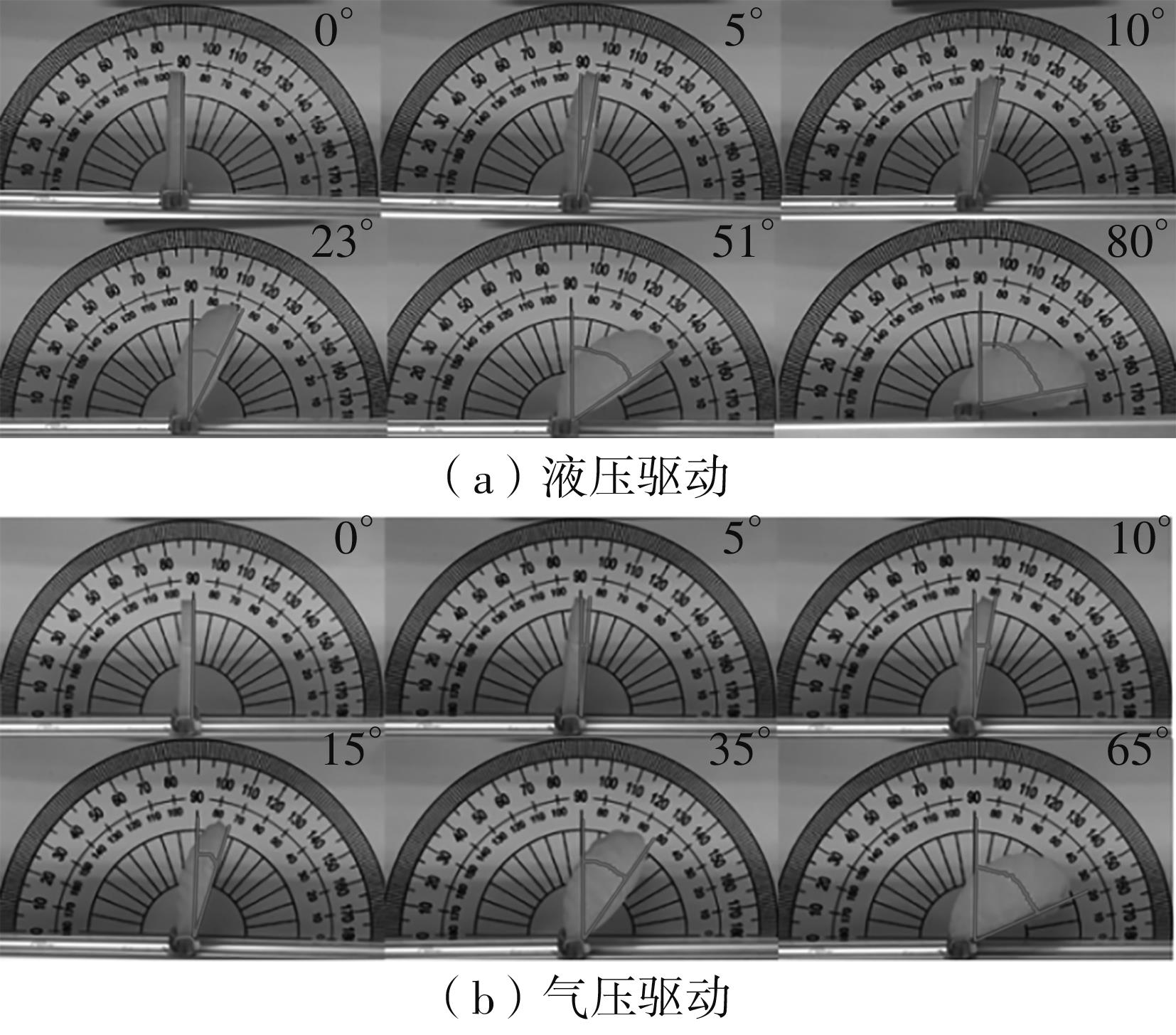
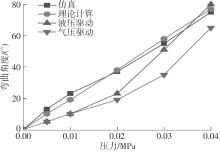
Fig.11
Comparison of the results among simulation, theoretical calculation and test"
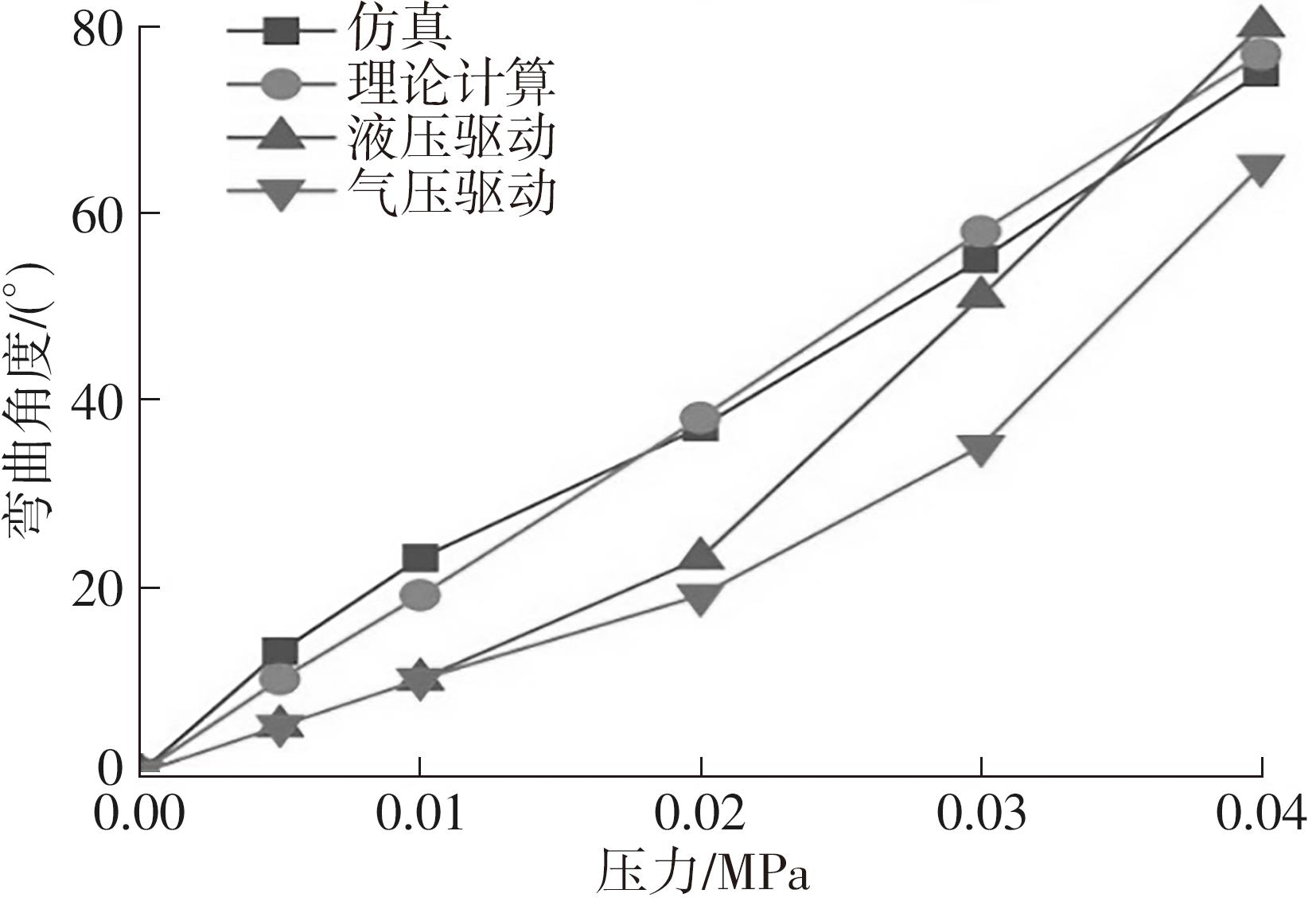
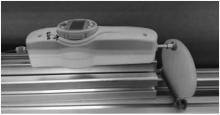
Fig.12
Test of closed force"
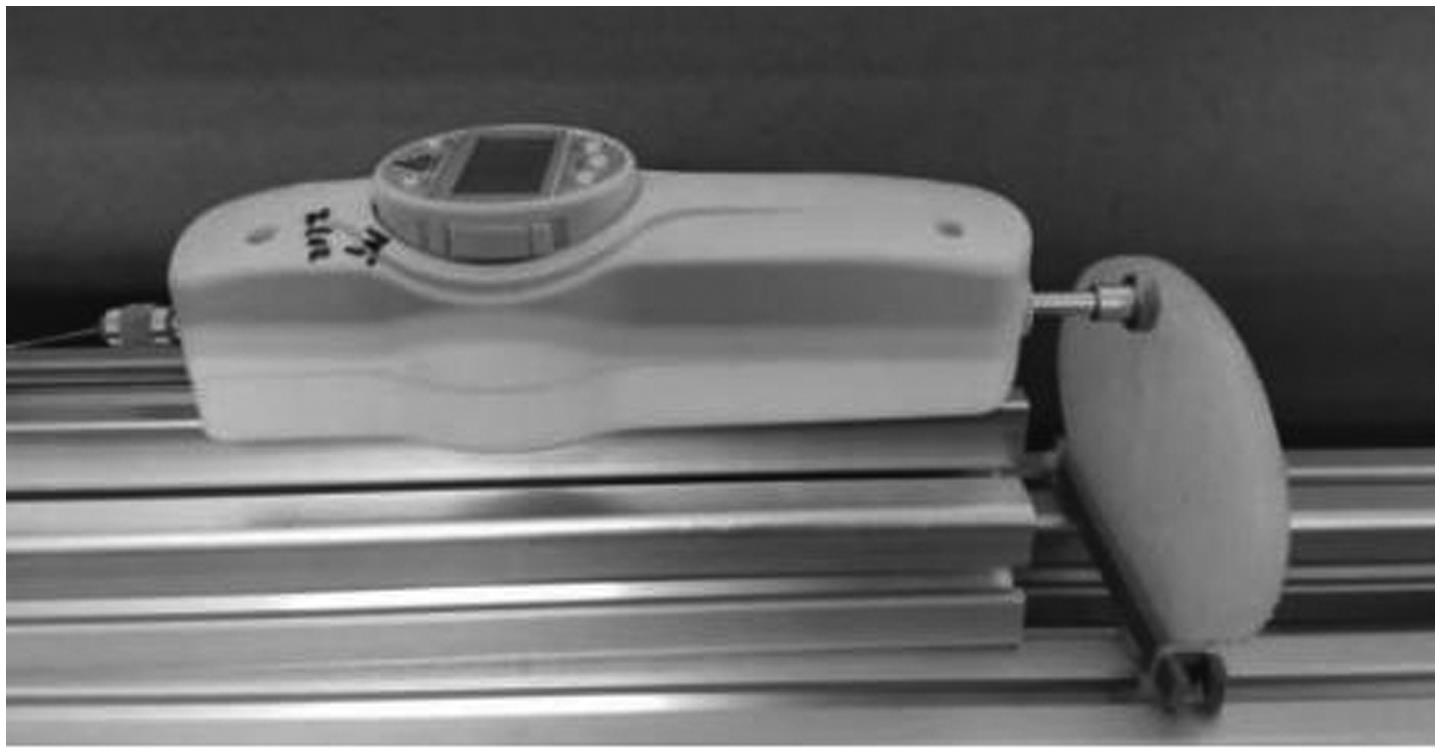
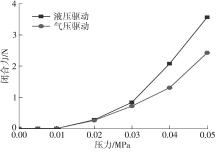
Fig.13
Test results of force at different pressures"
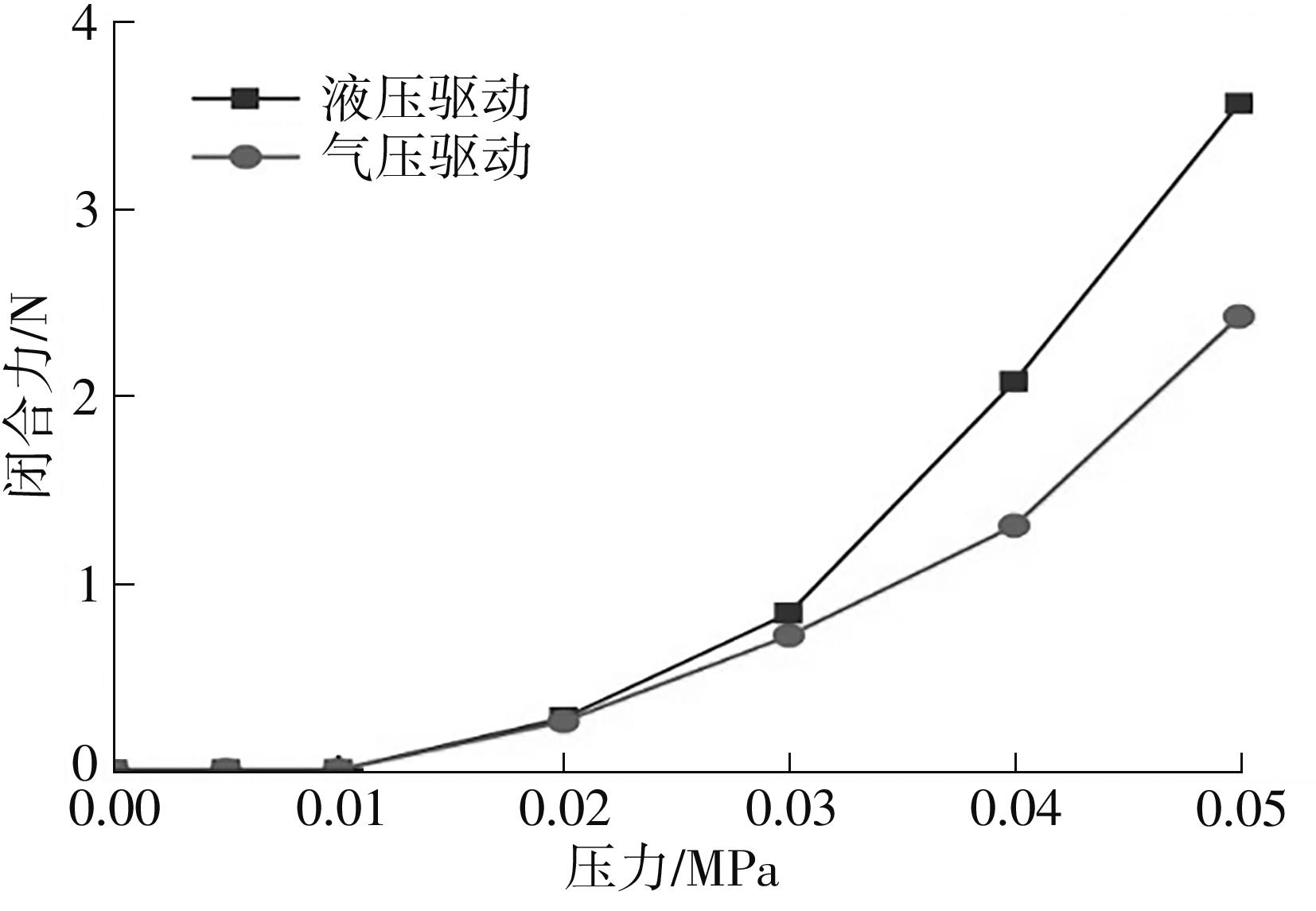
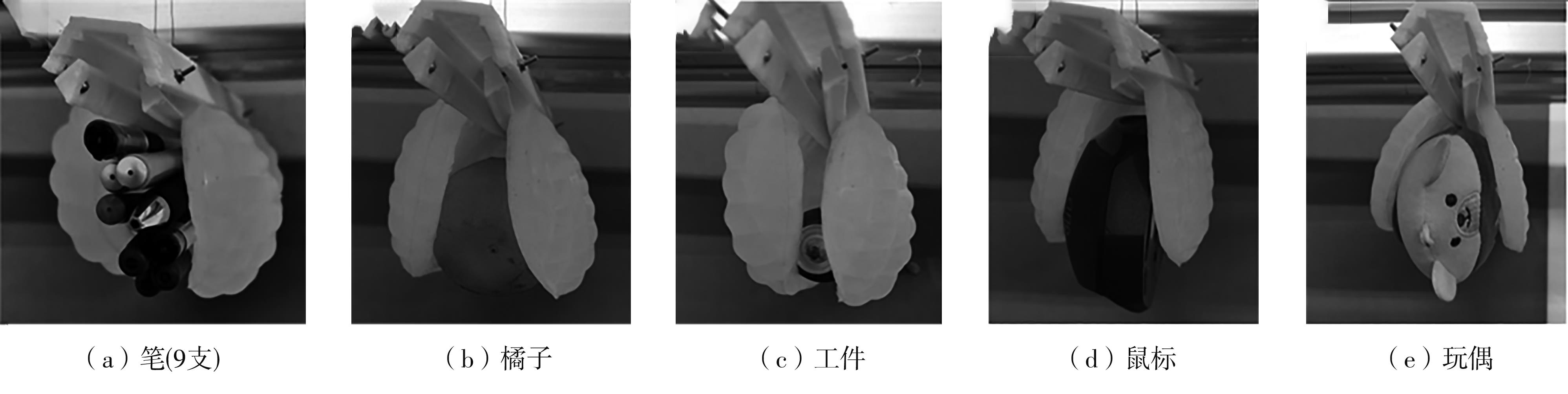
Table 2
Parameters of the captured items"
| 物品名 | 长×宽×高/(mm×mm×mm) | 质量/g |
|---|---|---|
| 笔(9支) | 9.0×9.0×17.5 | 74.1 |
| 橙子 | 6.3×6.3×6.0 | 127.4 |
| 工件 | 2.8×2.8×9.5 | 304.3 |
| 鼠标 | 6.9×11.4×4.0 | 84.4 |
| 玩偶 | 6.5×4.4×10.9 | 22.6 |

Fig.14
Compatibility test"
| 1 | 王海涛,彭熙凤,林本末 .软体机器人研究进展[J].华南理工大学学报(自然科学版),2020,48(2):94-106. |
| WANG Hai-tao, PENG Xi-feng, LIN Ben-mo .Research progress of soft robotics[J].Journal of South China University of Technology (Natural Science Edition),2020,48(2):94-106. | |
| 2 | 张进华,王韬,洪军,等 .软体机械手研究综述[J].机械工程学报,2017,53(13):19-28. |
| ZHANG Jin-hua, WANG Tao, HONG Jun,et al .A review of research on software manipulators[J].Chinese Journal of Mechanical Engineering,2017,53(13):19-28. | |
| 3 | 曹玉君,尚建忠,梁科山,等 .软体机器人研究现状综述[J].机械工程学报,2012,48(3):25-33. |
| CAO Yu-jun, SHANG Jian-zhong, LIANG Ke-shan,et al .A review of the research status of software robots[J].Chinese Journal of Mechanical Engineering,2012,48(3):25-33. | |
| 4 | 范需,戴宁,王宏涛,等 .气压驱动网格软体驱动器弯曲变形预测方法[J].中国机械工程,2020,31(9):1108-1114. |
| FAN Xu, DAI Ning, WANG Hong-tao,et al .Bending deformation prediction method of air pressure driven mesh software driver[J].China Mechanical Engineering,2020,31(9):1108-1114. | |
| 5 | 陈英龙,闫迪,张增猛,等 .基于水压直驱的软体单元的动静态特性[J].浙江大学学报(工学版),2019,53(8):1602-1609,1617. |
| CHEN Ying-long, YAN Di, ZHANG Zeng-meng,et al .Dynamic and static characteristics of soft element based on hydraulic direct drive[J].Journal of Zhejiang University (Engineering Edition),2019,53(8):1602-1609,1617. | |
| 6 | GALLOWAY K C, BECKER K P, PHILLIPS B,et al .Soft robotic grippers for biological sampling on deep reefs[J].Soft Robotics,2016,3(1):23-33. |
| 7 | POLYGERINOS P, WANG Z, GALLOWAY K C,et al .Soft robotic glove for combined assistance and at-home rehabilitation[J].Robotics and Autonomous Systems,2015,73:135-143. |
| 8 | 刘会聪,杨梦柯,袁鑫,等 .液态金属柔性感知的人机交互软体机械手[J].中国机械工程,2021,32(12):1470-1478. |
| LIU Hui-cong, YANG Meng-ke, YUAN Xin,et al .Human-computer interaction software manipulator based on liquid metal flexible perception[J].China Mechanical Engineering,2021,32(12):1470-1478. | |
| 9 | WANG H, XU H, ABU-DAKKA F,et al .A bidirectional soft biomimetic hand driven by water hydraulic for dexterous underwater grasping[J].IEEE Robotics and Automation Letters,2022,7(2):2186-2193. |
| 10 | 张氢,覃昶,孙远韬 .气动人工肌肉驱动灵巧手的设计与研究[J].液压与气动,2018(5):93-97. |
| ZHANG Qing, QIN Chang, SUN Yuan-tao .Dexterous hand actuated by pneumatic artificial muscle[J].Chinese Hydraulics & Pneumatics,2018(5):93-97. | |
| 11 | WANG H, XU H, YANG C,et al .Underwater soft robotic hand with multi-source coupling bio-inspired soft palm and six fingers driven by water hydraulic[J/OL].(2021-07-13)[2021-12-15].. |
| 12 | 周奕轩,张晨夕,别之龙,等 .捕蝇草的捕虫机理及应用前景研究进展[J].植物生理学报,2020,56(10):2047-2060. |
| ZHOU Yi-xuan, ZHANG Chen-xi, BIE Zhi-long,et al .Research progress on insect trapping mechanism and application prospect of Venus flytrap[J].Chinese Journal of Plant Physiology,2020,56(10):2047-2060. | |
| 13 | HEDRICH R, NEHER E .Venus flytrap:how an excitable,carnivorous plant works[J].Trends in Plant Science,2018,23(3):220-234. |
| 14 | MOSADEGH B, POLYGERINOS P, KEPLINGER C,et al .Pneumatic networks for soft robotics that actuate rapidly[J].Advanced Functional Materials,2014,24(15):2163-2170. |
| 15 | WAKIMOTO S, SUZUMORI K, OGURA K .Miniature pneumatic curling rubber actuator generating bidirectional motion with one air-supply tube[J].Advanced Robotics,2011,25(9/10):1311-1330. |
| 16 | ROBERT F S, ADAM A S, RUI M D N,et al .Soft machines that are resistant to puncture and that self seal[J].Advanced Materials,2013,25(46):6709-6713. |
| 17 | 余家泉,陈雄,周长省,等 .EPDM薄膜橡胶包覆材料的粘-超弹本构模型研究[J].推进技术,2015,36(3):465-470. |
| YU Jia-quan, CHEN Xiong, ZHOU Chang-sheng,et al .Research on visco-hyperelastic constitutive model of EPDM film rubber coating material[J].Propulsion Technology,2015,36(3):465-470. | |
| 18 | 王国权,刘萌,姚艳春,等 .不同本构模型对橡胶制品有限元法适应性研究[J].力学与实践,2013,35(4):40-47. |
| WANG Guoquan, LIU Meng, YAO Yanchu,et al .Application of different constitutive models in the nonlinear finite element method for rubber parts[J].Mechanics in Engineering,2013,35(4):40-47. |
| [1] | WANG Xiaoxián, LIU Jiaping, MU Song, et al. Sodium β-Glycerophosphate in Concrete Affects the Inhibited Behavior of Steel Bar [J]. Journal of South China University of Technology(Natural Science Edition), 2024, 52(3): 28-40. |
| [2] | HUANG Huaiwei, HUANG Haibo. Numerical Simulation of Electromechanical Coupling Response of Nano Flexoelectric Structures [J]. Journal of South China University of Technology(Natural Science Edition), 2024, 52(1): 147-156. |
| [3] | YU Mingquan, ZHAO Jiyun, MAN Jiaxiang, et al.. Study of Distribution Structure for High Water-Based Hydraulic Motor [J]. Journal of South China University of Technology(Natural Science Edition), 2023, 51(9): 19-29. |
| [4] | ZENG Min, XIE Jianxing, LI Zhitao, et al.. Modeling and Dynamic Simulation of Temperature Control Method for Hot Bar Soldering Based on Extended Kalman Filter [J]. Journal of South China University of Technology(Natural Science Edition), 2023, 51(9): 11-18. |
| [5] | LU Zhimin, LI Bohang, TANG Wen, et al. Optimization Simulation of Ammonia Injection in SCR DeNO x System of Coal-Fired Power Plant [J]. Journal of South China University of Technology(Natural Science Edition), 2023, 51(8): 62-70. |
| [6] | LIN Peiqun, ZHANG Yang, LUO Zhiqing, et al. Precise Calculation Method of Traffic Carbon Emission in Expressway Segment Integrating Multi-Source Data [J]. Journal of South China University of Technology(Natural Science Edition), 2023, 51(7): 100-108. |
| [7] | LIU Dingping, ZHANG Xiangyang, CHEN Aihua, et al. Numerical Analysis of Performance of Cyclone-Tube Demister Based on Orthogonal Design [J]. Journal of South China University of Technology(Natural Science Edition), 2023, 51(6): 89-96. |
| [8] | MA Xiangjun, WANG Zhen, YAO Zhiqiang, et al. Numerical Simulation on Melt Flow Characteristics of UHMWPE in Eccentric Rotor Extruder [J]. Journal of South China University of Technology(Natural Science Edition), 2023, 51(5): 114-121. |
| [9] | ZHANG Wenyu, ZHANG Chunyang, WANG Yicheng. Study on Simulation and Design of Natural Ventilation for Patio Space of Multi Corridor Inpatient Building in Humid and Hot Areas [J]. Journal of South China University of Technology(Natural Science Edition), 2023, 51(4): 61-70. |
| [10] | SUN Haitao, YANG Yu. Research on Audio-Visual Integration Based on Architectural Acoustic Simulation [J]. Journal of South China University of Technology(Natural Science Edition), 2023, 51(4): 71-79. |
| [11] | ZHAO Xiaohua, DONG Wenhui, LI Jia, et al. Influence Characteristics and Action Mechanism of Tunnel Traffic Signs Based on Driving Behavior [J]. Journal of South China University of Technology(Natural Science Edition), 2023, 51(4): 88-100. |
| [12] | DAI Gonglian, CHEN Kun, GE Hao, et al. Research on Numerical Simulation of Rail Non-contact Nondestructive Testing Technology [J]. Journal of South China University of Technology(Natural Science Edition), 2023, 51(4): 44-52. |
| [13] | LI Shuxun, HU Yinggang, LI Cheng, et al. Optimization of Body Profile Line of Axial Flow Control Valve Based on Surrogate Model [J]. Journal of South China University of Technology(Natural Science Edition), 2023, 51(3): 41-52. |
| [14] | TIAN Lifeng, GUO Meiqi, DING Hao, et al. On Aero-optical Effect and Control of Supersonic Boundary Layer [J]. Journal of South China University of Technology(Natural Science Edition), 2023, 51(2): 137-146. |
| [15] | YU Mingquan, ZHAO Jiyun, MAN Jiaxiang, et al.. Study on Flow Distribution Mechanism of Low Speed High Torque Hydraulic Motor [J]. Journal of South China University of Technology(Natural Science Edition), 2023, 51(11): 101-109. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||