Journal of South China University of Technology(Natural Science Edition) ›› 2025, Vol. 53 ›› Issue (2): 38-47.doi: 10.12141/j.issn.1000-565X.240346
• Traffic Safety • Previous Articles Next Articles
Complex Scenario Construction Method for Navigation Pilot Based on Natural Driving Behaviour
WU Biao, REN Hongze, ZHENG Lianqing, ZHU Xichan, MA Zhixiong
- College of Automotive Studies,Tongji University,Shanghai 201804,China
-
Received:2024-07-01Online:2025-02-25Published:2025-02-03 -
Contact:马志雄(1978—),男,博士,讲师,主要从事智能网联汽车主被动安全测试评价研究。 E-mail:mzx1978@tongji.eud.cn -
About author:武彪(1987—),男,博士生,主要从事智能网联汽车安全分析研究。E-mail: biao.wu@tongji.edu.cn -
Supported by:the National Key R & D Program of China(2022YFB2503404)
CLC Number:
Cite this article
WU Biao, REN Hongze, ZHENG Lianqing, ZHU Xichan, MA Zhixiong. Complex Scenario Construction Method for Navigation Pilot Based on Natural Driving Behaviour[J]. Journal of South China University of Technology(Natural Science Edition), 2025, 53(2): 38-47.
share this article
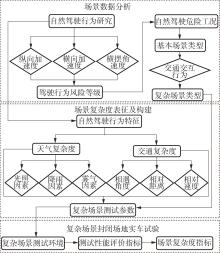
Fig.1
Construction framework of NP complex scenarios"
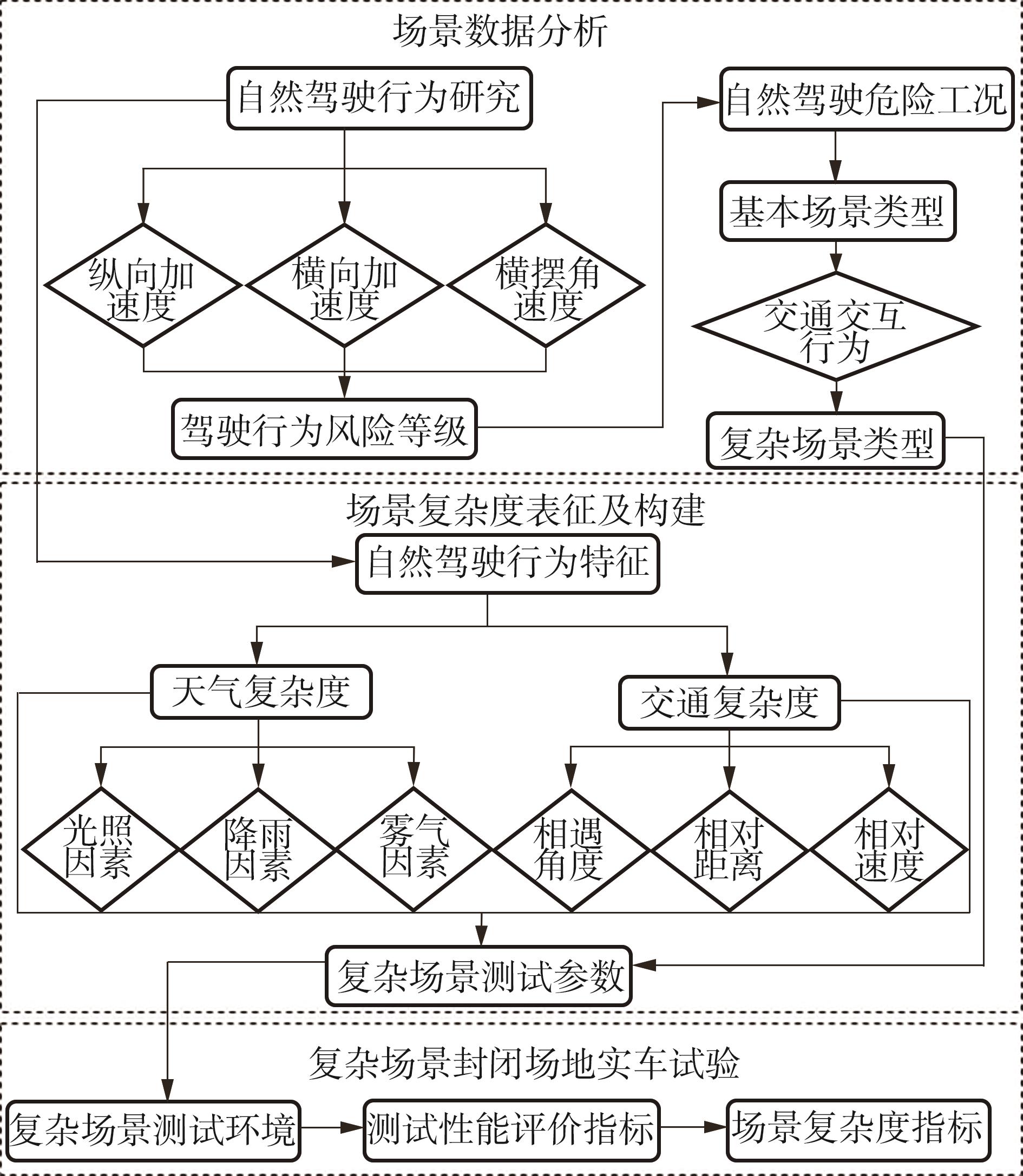
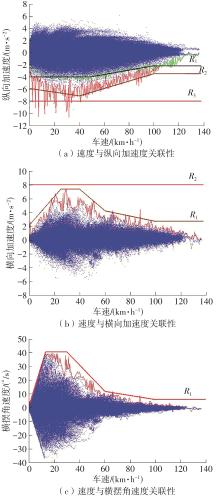
Fig.2
Correlation of velocity with longitudinal acceleration, lateral acceleration and yaw rate"
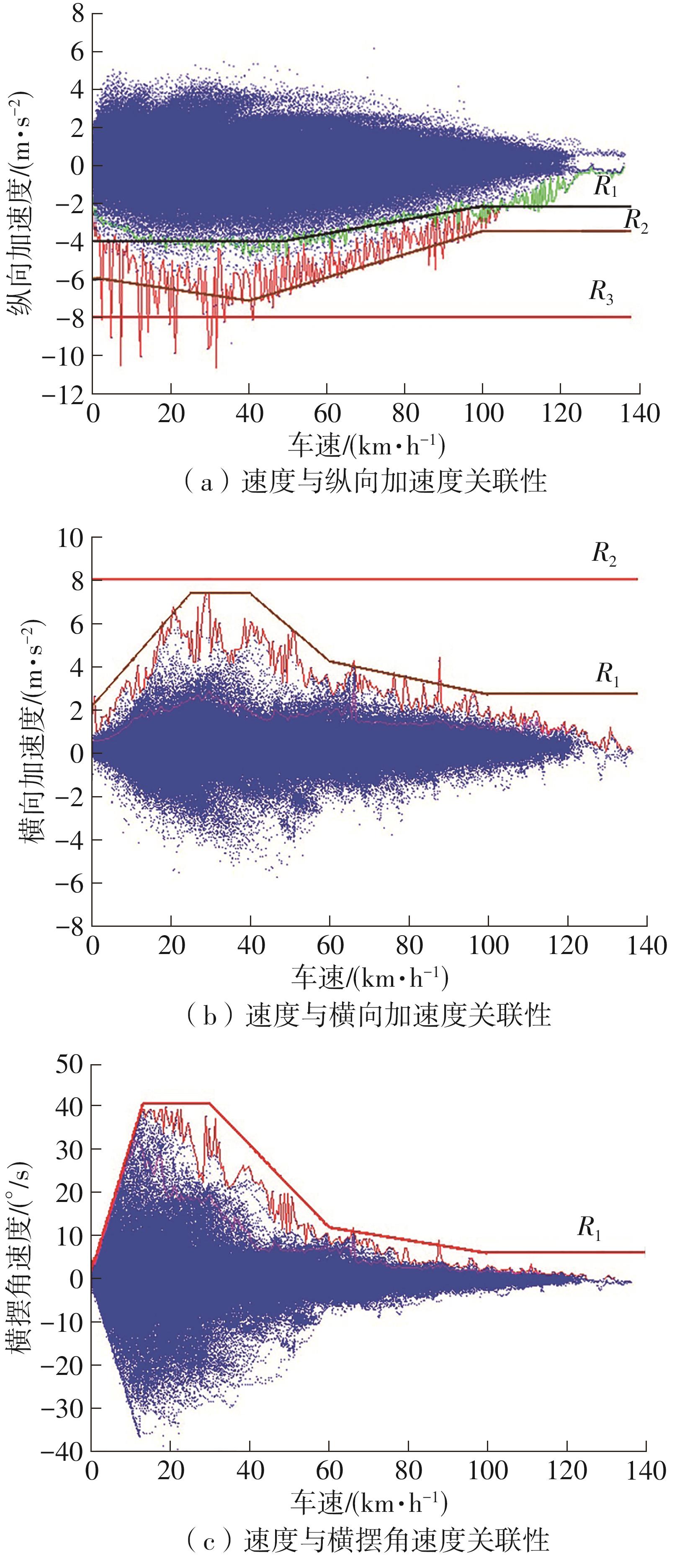
Table 1
Driving behaviour risk levels for velocity and longitudinal acceleration"
| v/(km·h-1) | ax /(m·s-2) | ||
|---|---|---|---|
| R1 | R2 | R3 | |
| 0~40 | -4 | -0.030 5v-5.93 | -8 |
| 40~50 | -4 | 0.061 2v-9.6 | |
| 50~100 | 0.036 2v-5.81 | 0.061 2v-9.6 | |
| 100~120 | -2.19 | -3.48 | |
Table 2
Driving behaviour risk levels for velocity and lateral acceleration"
| v/(km·h-1) | ||
|---|---|---|
| R1 | R2 | |
| 0~25 | 0.210 4v+2.1 | -8 |
| 25~40 | 7.36 | |
| 40~60 | -0.156 6v+13.624 | |
| 60~100 | -0.038 3v+6.526 | |
| 100~120 | 2.696 | |
Table 3
Driving behaviour risk levels for velocity and yaw rate"
| v/(km·h-1) | |
|---|---|
| 0~13 | 2.991 7 v+1.892 9 |
| 13~30 | 40.785 |
| 30~60 | -0.957 7 v+69.516 |
| 60~100 | -0.149 1 v+21 |
| 100~120 | 6.09 |
Table 4
Statistical results of naturalistic driving hazardous cases classification"
| 危险工况类型 | 频数 | 占比/% |
|---|---|---|
| 相同行驶方向:追尾 | 287 | 36.79 |
| 相同行驶方向:侧碰撞 | 186 | 23.85 |
| 与同向自行车碰撞 | 83 | 10.64 |
| 交叉路口碰撞 | 79 | 10.13 |
Table 5
Complex scenario types and descriptions"
| 复杂场景类型 | 场景描述 |
|---|---|
| 巡航 | 前车的前车制动,前车切出 |
| 前车的前车低速,前车切出 | |
| 前车制动,相邻车道有车 | |
| 前车低速,相邻车道有车 | |
| 相邻车道前车的前车切入本车车道 | |
| 本车车道前方有车,相邻车道前车切入本车车道 | |
| 相邻车道有车,另一侧相邻车道车辆切入 | |
| 变道 | 本车车道后方有车,相邻车道后方有车,本车变道至相邻车道 |
| 本车车道前方车辆制动,相邻车道后方有车,本车变道至相邻车道 | |
| 本车车道前方车辆低速,相邻车道后方有车,本车变道至相邻车道 | |
| 本车车道前方障碍物,相邻车道有车,本车变道至相邻车道 | |
| 本车变道,目标车道的外侧车道有车同时变道 | |
| 路口 | 本车对向车道遮挡,遭遇横向来车 |
| 本车同向车辆遮挡,遭遇横向来车 | |
| 本车中央隔离带遮挡,遭遇横向来车 | |
| 本车左转,遭遇对向右转目标车辆 | |
| 本车右转,遭遇横向直行目标车辆 |
Table 6
Quantification of natural weather factors"
| 光照强度/lux | 降雨量/mm | 雾气能见度/m |
|---|---|---|
| 0~50 | 0 | 0~50 |
| 50~5 000 | 1~10 | 50~100 |
| 5 000~100 000 | 10~25 | 100~200 |
| 100 000~150 000 | 25~50 | 200~500 |
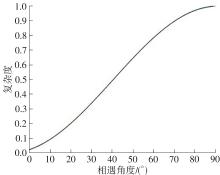
Fig.3
Encounter angle correlates with complexity"
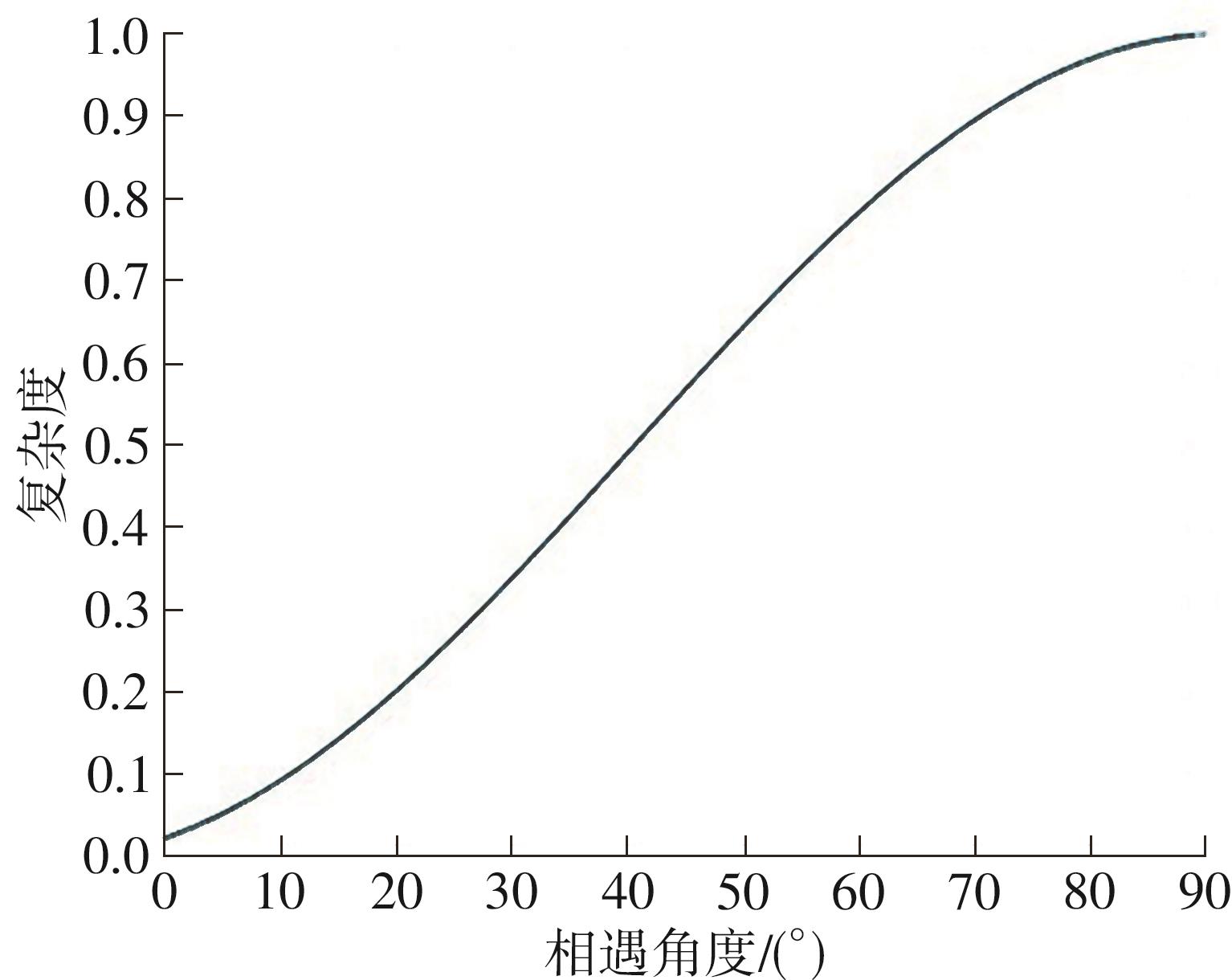
Fig.4
Correlation of Relative distance to maximum relative distance ratio and complexity"
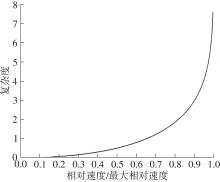
Fig.5
Relative velocity to maximum relative velocity ratio and complexity"
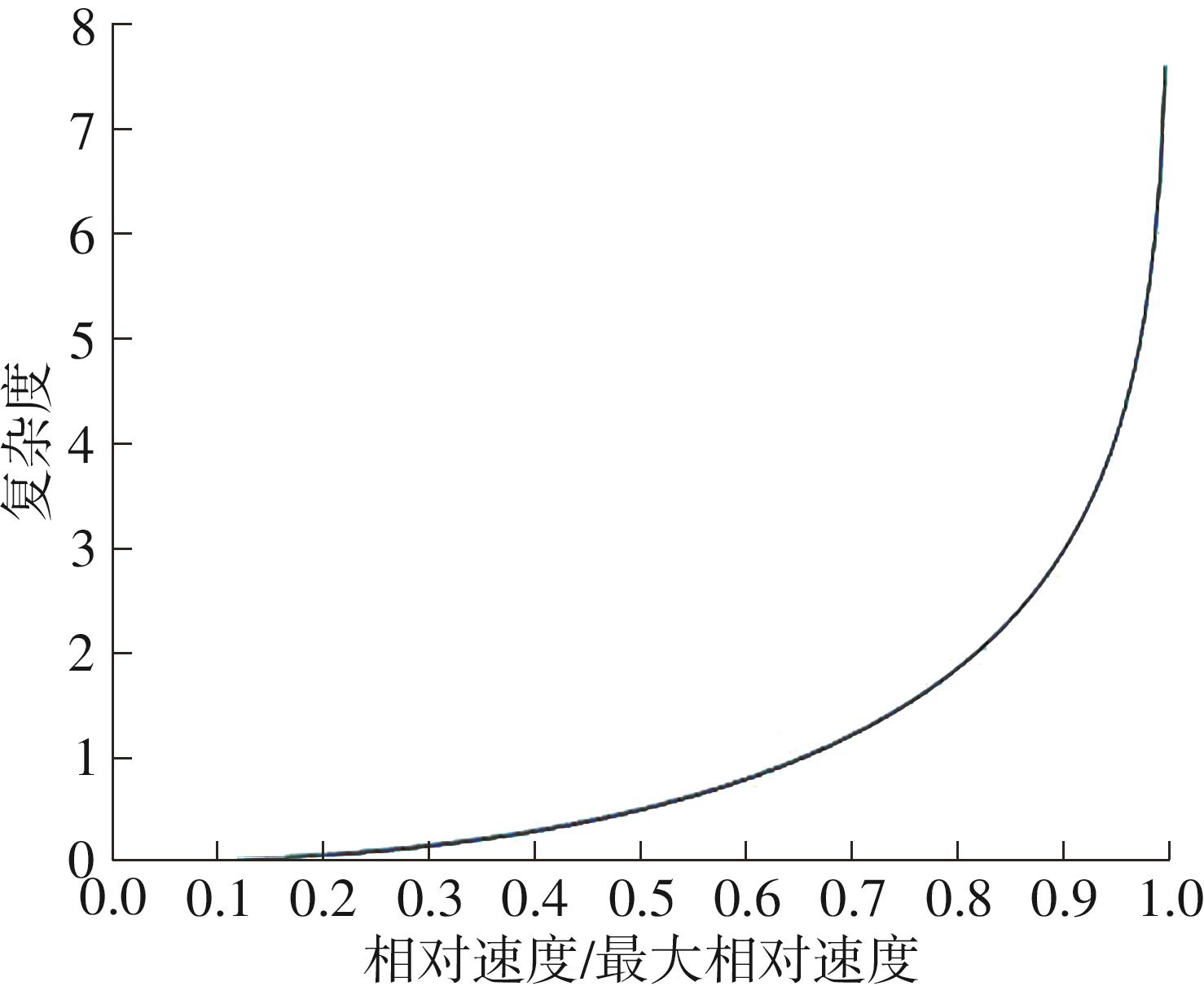
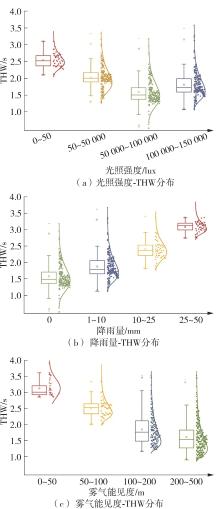
Fig.6
THW distribution correlates with light intensity, rainfall intensity and fog visibility"
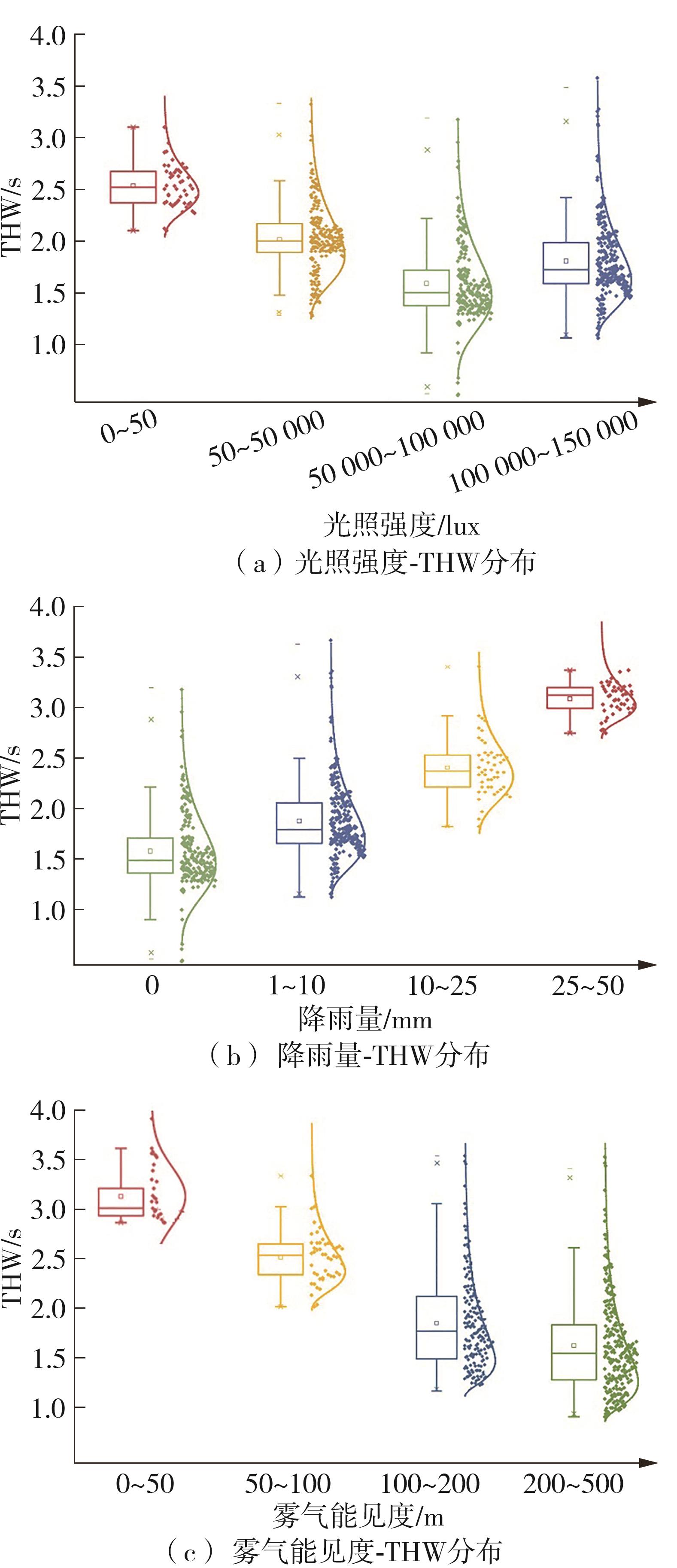
Table 7
Impact indicators of natural weather factors"
| 光照强度/lux | 降雨量/mm | 雾气能见度/m | |||
|---|---|---|---|---|---|
| 0~50 | 1.7 | 0 | 1.0 | 0~50 | 2.0 |
| 50~5 000 | 1.4 | 1~10 | 1.3 | 50~100 | 1.6 |
| 5 000~100 000 | 1.0 | 10~25 | 1.6 | 100~200 | 1.2 |
| 100 000~150 000 | 1.2 | 25~50 | 2.0 | 200~500 | 1.0 |
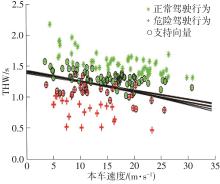
Fig.7
Fitting curve of THW correlates with v"
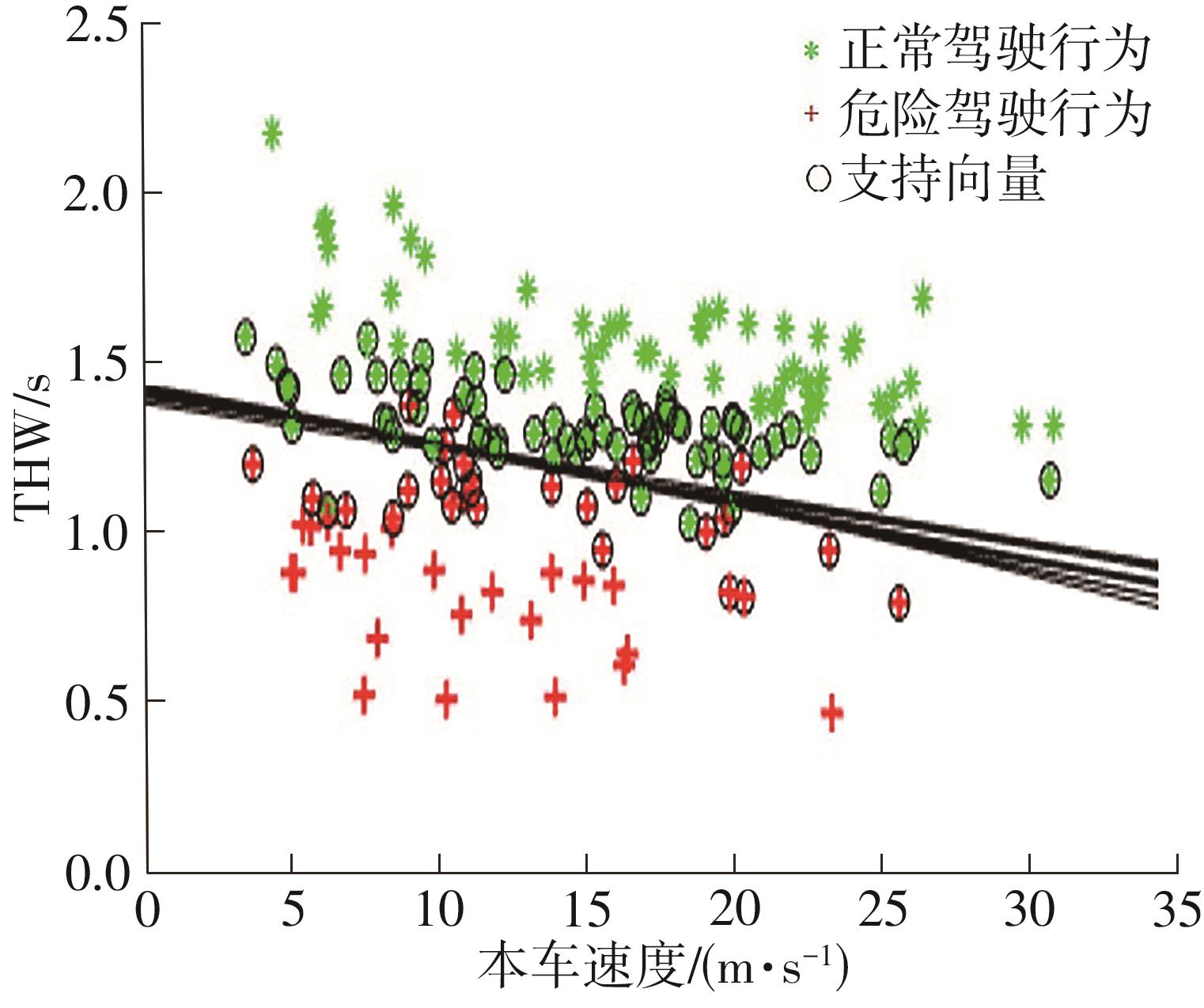

Fig.8
Fitting curve of TTC correlates with v"
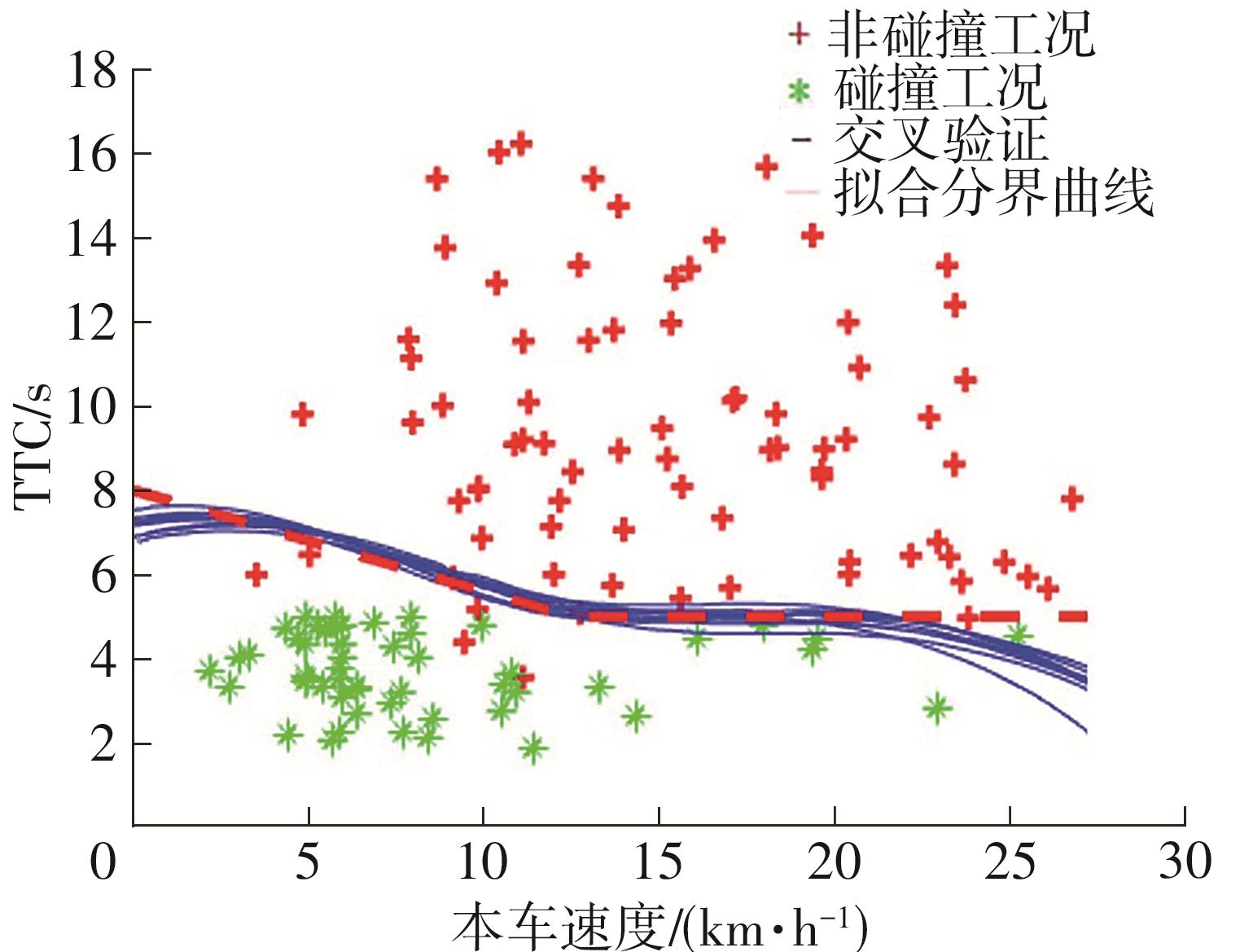

Fig.9
Closed filed test vehicle NIO ET5T"


Fig.10
Complex scenarios test in closed field"
Table 8
Complex scenario test parameters"
| 参数 | 数值 |
|---|---|
| 场景类型 | 巡航场景 |
| 场景描述 | 前车的前车制动,前车切出 |
| 场景图示 | 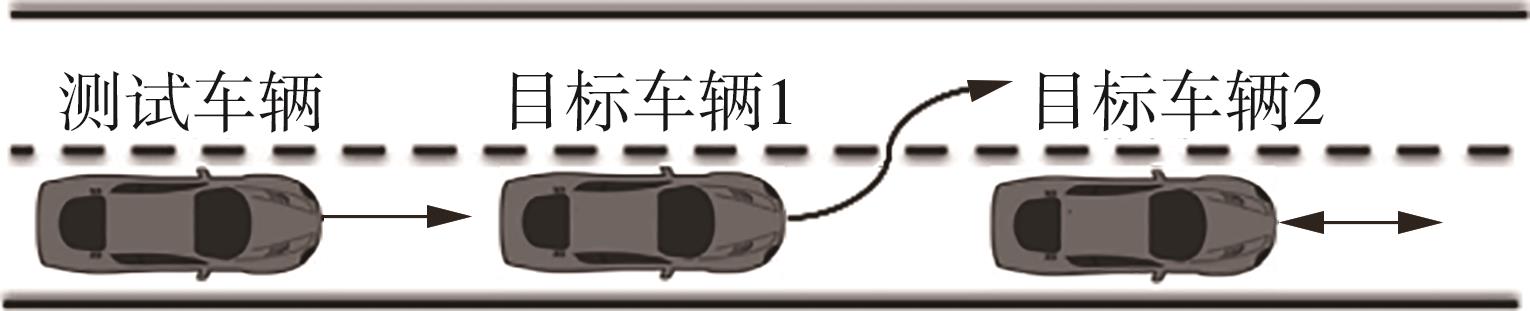 |
| 试验环境 | 试验道路为至少包含两条车道的直道,最少有1条虚线车道线 |
| 试验方法 | 测试车辆以最小跟车距离跟随目标车辆1匀速行驶,目标车辆2制动导致目标车辆1变道,测试车辆遭遇制动的目标车辆2 |
| 天气条件 | 光照强度:40 lux |
| 降雨量:5 mm | |
| 雾气能见度:100~200 m | |
| 测试参数 | 测试车辆速度:60 km/h |
| 目标车辆1纵向速度:60 km/h | |
| 目标车辆1横向速度:4 m/s | |
目标车辆2纵向速度:50 km/h 目标车辆2纵向减速度:-4 m/s2 | |
| 目标车辆1和目标车辆2间距:10 m |
Table 9
Test evaluation parameters"
| 参数 | 数值 |
|---|---|
| 测试车辆与目标车辆2间距/m | 18 |
| 测试车辆纵向减速度/(m·s-2) | -2.11 |
| 测试车辆静止后与目标车辆2间距/m | 2.52 |
| 1 | 导航智能驾驶测评规程(2020版修订版): IVISTA SMNP TPR A0—2022 [S]. |
| 2 | Intelligent transport systems-Forward vehicle collision systems-Performance requirements and test procedures: [S]. |
| 3 | Intelligent transport systems-Lane departure warning systems-Performance requirements and test procedures: [S]. |
| 4 | Intelligent transport systems-Adaptive cruise control systems-Performance requirements and test procedures: [S]. |
| 5 | Uniform provisions concerning the approval of vehicles with regard to automated lane keeping systems:UN ECE R157—2021 [S]. |
| 6 | RIEDMAIE S, PONN T, LUDWIG D,et al .Survey on scenario-based safety assessment of automated vehicles[J].IEEE Access,2020,8(4):87456-87477. |
| 7 | HAUER F, SCHMIDT T, HOLZMÜLLER B,et al .Did we test all scenarios for automated and autonomous driving systems?[C]∥ Proceeding of the 2019 IEEE Intelligent Transportation Systems Conference (ITSC).[S.l.]: IEEE,2019:2950-2955. |
| 8 | DUAN J, GAO F, HE Y,et al .Test scenario generation and optimization technology for intelligent driving systems[J].IEEE Intelligent Transportation Systems Magazine,2020,14(1):115-127. |
| 9 | GELDER E,HOF J, CATOR E,et al .Scenario para-meter generation method and scenario representativeness metric for scenario-based assessment of automated vehicles[J].IEEE Transactions on Intelligent Transportation Systems,2022,23(10):18794-18807. |
| 10 | 陈吉清,舒孝雄,兰凤崇,等 .典型危险事故特征的自动驾驶测试场景构建[J].华南理工大学学报(自然科学版),2021,49(5):1-8. |
| CHEN Jiqing, SHU Xiaoxiong, LAN Fengchong,et al .Construction of autonomous vehicles test scenarios with typical dangerous accident characteristics[J].Journal of South China University of Technology (Natural Science Edition),2021,49(5):1-8. | |
| 11 | INDAHENG F, KIM E, VISWANADHA K,et al .A scenario-based platform for testing autonomous vehicle behavior prediction models in simulation[J].arxiv preprint arxiv:2110.14870,2021. |
| 12 | STADLER C, MONTANARI F, BARON W,et al .A credibility assessment approach for scenario-based virtual testing of automated driving functions[J].IEEE Open Journal of Intelligent Transportation Systems,2022,3(2):45-60. |
| 13 | 李平飞,金思雨,胡文浩,等 .用于自动驾驶仿真测试的车——车事故场景复杂度评价[J].汽车安全与节能学报,2022,13(4):697-704. |
| LI Pingfei, JIN Siyu, HU Wenhao,et al .Complexity evaluation of vehicle-vehicle accident scenarios for autonomous driving simulation tests[J].Journal of Automotive Safety and Energy,2022,13(4):697-704. | |
| 14 | 董汉,舒伟,陈超,等 .危险驾驶工况场景的复杂度评估方法研究[J].汽车工程,2020,42(6):808-814. |
| DONG Han, SHU Wei, CHEN Chao,et al .Research on complexity evaluation method of dangerous driving scenes[J].Automotive Engineering,2020,42(6): 808-814. | |
| 15 | MA B, ZHANG Z, GUO G,et al .Study on influence factors of intelligent connected vehicle (ICV) performance under complex weather conditions[C]∥ Proceeding of the 2020 E3S Web of Conferences.[S.l.]:EDP Sciences,2020,213:02024/924-927. |
| 16 | MA B, LI W, ZHANG Z,et al .Research on weather condition influence factors on intelligent connected vehicle[C]∥ Proceeding of Journal of Physics:Confe-rence Series.[S.l.]:IOP Publishing,2020,1550(3):032021/122-125. |
| 17 | LEBLANC D J, SAYER J, WINKLER C,et al .Road departure crash warning system field operational test:methodology and results.volume 1:technical report[R].Ann Arbor:Transportation Research Institute,University of Michigan,2006. |
| 18 | DiINGUS T A, KLAUER S, NEALE V,et al .The 100-car naturalistic driving study:phase Ⅱ-results of the 100-car field experiment[R].Washington:National Highway Traffic Safety Administration(NHTSA),United States,2006. |
| 19 | BARNARD Y, KOSKINEN S, NNAMAA S,et al .Data management and data sharing in field operational tests[C]∥ Proceeding of 2016 Intelligent Transportation Systems.New York:CRC Press,2016:69-82. |
| 20 | HANOWSKI R J, NAKATA A, OLSON R L .Metho-dological overview of the drowsy driver warning system field operational test[J].SAE Transactions,2004,4(5):610-615. |
| 21 | OLSON R L, HANOWSKI R J, HICKMAN J S,et al .Driver distraction in commercial vehicle operations[R].Washington:Department of Transportation,Federal Motor Carrier Safety Administration,United States,2009. |
| 22 | ANTIN J, LEE S, HANKEY J,et al .Design of the in-vehicle driving behavior and crash risk study:in support of the SHRP 2 naturalistic driving study[R].Washington:Transportation Research Board of the National Academies,United States,2011. |
| 23 | ZHANG X, TAO J, TAN K,et al . Finding critical scenarios for automated driving systems:a systematic literature review[J].arXiv Preprint arXiv:2110.08664,2021. |
| 24 | 降水量等级: [S]. |
| 25 | 雾天公路通行条件预警分级: [S]. |
| 26 | YIM J B, PARK D J .Modeling evasive action to be implemented at the minimum distance for collision avoi-dance in a give-way situation[J].Ocean Engineering,2022,263:112-210. |
| 27 | ANAND K, BIANCONI G .Entropy measures for networks:toward an information theory of complex topologies[J].Physical Review E—Statistical,Nonlinear,and Soft Matter Physics,2009,80(4):45-102. |
| [1] | MA Xinlu, FAN Bo, CHEN Shiao, et al. Evaluation and Analysis Model for Freeways Crash Risk Based on Real-Time Traffic Flow [J]. Journal of South China University of Technology(Natural Science Edition), 2021, 49(8): 19-25,34. |
| [2] | ZHAO Jing, WANG Xuancang, FAN Zhenyang, et al. Evaluation on Performance of Asphalt Pavement Based on Support Vector Machine [J]. Journal of South China University of Technology (Natural Science Edition), 2020, 48(9): 116-123. |
| [3] | LI Juhu FAN Ruixian CHEN Zhibo. Forest Fire Recognition Based on Color and Texture Features [J]. Journal of South China University of Technology (Natural Science Edition), 2020, 48(1): 70-83. |
| [4] | YANG Xiaowei HUANG Yingting. A Multi-feature Fusion-based Algorithm for Real-time Single Object Tracking [J]. Journal of South China University of Technology(Natural Science Edition), 2019, 47(6): 1-9. |
| [5] | TIAN Lianfang WU Qichao DU Qiliang HUANG Liguang LI Miao ZHANG Daming. Recognition of Passengers'Abnormal Behavior on the Escalator Based on Human Skeleton Sequence [J]. Journal of South China University of Technology(Natural Science Edition), 2019, 47(4): 10-19. |
| [6] | NIU Haiqing WU Juzhuo GUO Shaofeng. Application of Singular Value Decomposition to Pattern Recognition of Partial Discharge in Cable [J]. Journal of South China University of Technology (Natural Science Edition), 2018, 46(1): 26-32. |
| [7] | WANG Jia-peng HU Yue-ming LUO Jia-xiang. An ICDF-Based Fast Parameter Optimization Approach for Support Vector Machines [J]. Journal of South China University of Technology (Natural Science Edition), 2017, 45(7): 135-142. |
| [8] | CHEN Jun-ying ZHOU Shun-feng MIN Hua-qing. “Word Frequency-Filtering”Hybrid Feature Selection Method Applied to Spam Identification [J]. Journal of South China University of Technology (Natural Science Edition), 2017, 45(3): 82-88. |
| [9] | YE Guo-qiang LI Wei-guang WAN Hao. Image Moment-Based Visual Servoing Method with Learning Features [J]. Journal of South China University of Technology (Natural Science Edition), 2017, 45(2): 99-107. |
| [10] | NIU Hai-qing YE Kai-fa XU Jia WU Ju-zhuo LUO Jian-bin LU Guo-jun. Calculation of Cable Temperature Based on Support Vector Machine Optimized by Particle Swarm Algorithm [J]. Journal of South China University of Technology (Natural Science Edition), 2016, 44(4): 77-83. |
| [11] | QU Jie ZHANG Guo-jie XU Xiao-qin. Optimization Design of Rivet Head for Shaft Riveting Assembly of Hub Bearing Unit [J]. Journal of South China University of Technology (Natural Science Edition), 2016, 44(2): 60-66,73. |
| [12] | Liu Xiao-feng Zhang Xue-ying Zizhong John Wang. Logistic Kernel Function and its Application to Speech Recognition [J]. Journal of South China University of Technology (Natural Science Edition), 2015, 43(5): 100-106. |
| [13] | Hu Qing-hui Ding Li-xin Liu Xiao-gang Li Zhao-kui. A Non-Sparse Multi-Kernel Learning Method Based on Primal Problem [J]. Journal of South China University of Technology (Natural Science Edition), 2015, 43(5): 78-85. |
| [14] | Liu Qiong Wang Guo-hua Shen Min-min. Pedestrian Detection with Vehicle-Mounted Far-Infrared Monocular Sensor Based on Edge Segmentation [J]. Journal of South China University of Technology (Natural Science Edition), 2015, 43(1): 87-91,98. |
| [15] | Wang You- wei Liu Yuan- ning Feng Li- zhou Zhu Xiao- dong. A Novel Online Spam Identification Method Based on User Interest Degree [J]. Journal of South China University of Technology (Natural Science Edition), 2014, 42(7): 21-27. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||