Journal of South China University of Technology(Natural Science Edition) ›› 2023, Vol. 51 ›› Issue (2): 88-99.doi: 10.12141/j.issn.1000-565X.220459
Special Issue: 2023年交通运输工程
• Traffic & Transportation Engineering • Previous Articles Next Articles
Automated Extraction of Road Geometry Information Using Mobile LiDAR Point Cloud
YU Bin ZHANG Yuqin WANG Yuchen CHEN Tianheng
- School of Transportation,Southeast University,Nanjing 211189,Jiangsu,China
-
Received:2022-12-12Online:2023-02-25Published:2023-02-01 -
Contact:于斌(1985-),男,工学博士,教授,博士生导师,主要从事绿色智能交通、功能性路面材料研究。 E-mail:yb@seu.edu.cn -
About author:于斌(1985-),男,工学博士,教授,博士生导师,主要从事绿色智能交通、功能性路面材料研究。 -
Supported by:the National Natural Science Foundation of China(51878163)
CLC Number:
Cite this article
YU Bin, ZHANG Yuqin, WANG Yuchen, et al. Automated Extraction of Road Geometry Information Using Mobile LiDAR Point Cloud[J]. Journal of South China University of Technology(Natural Science Edition), 2023, 51(2): 88-99.
share this article
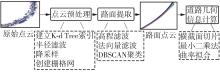
Fig. 1
Workflow of the proposed frramework"
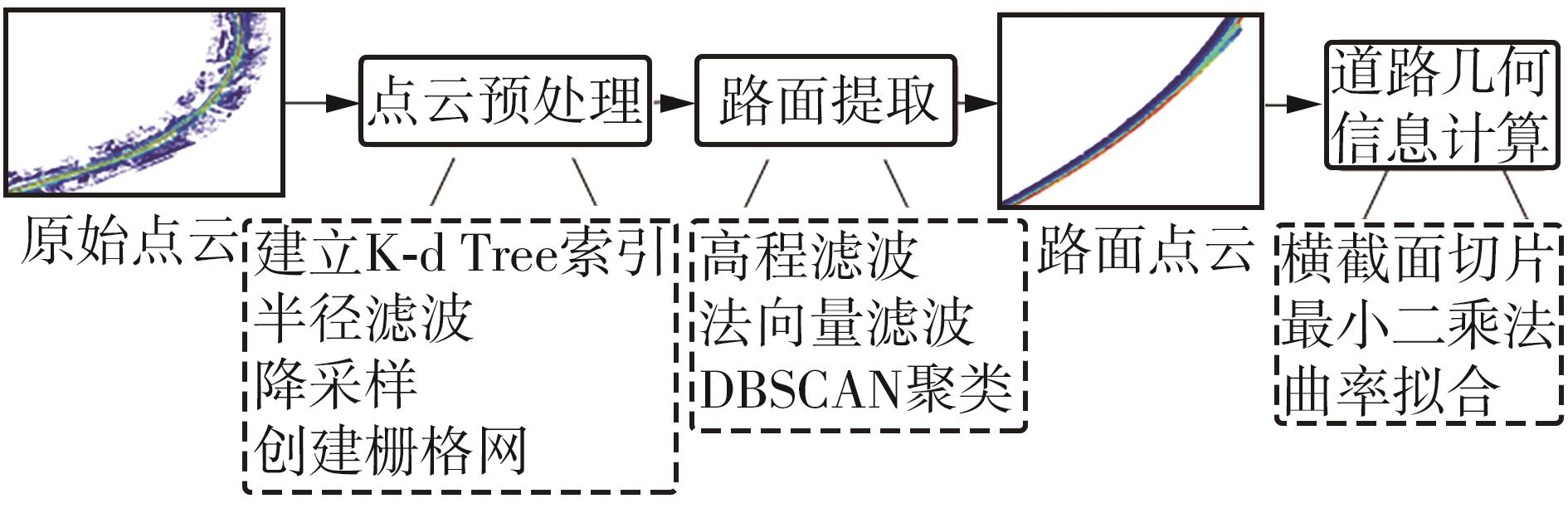
Fig. 2
Comparison before and after subsampling"
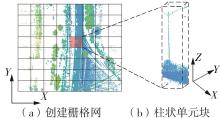
Fig. 3
Grid the point cloud"
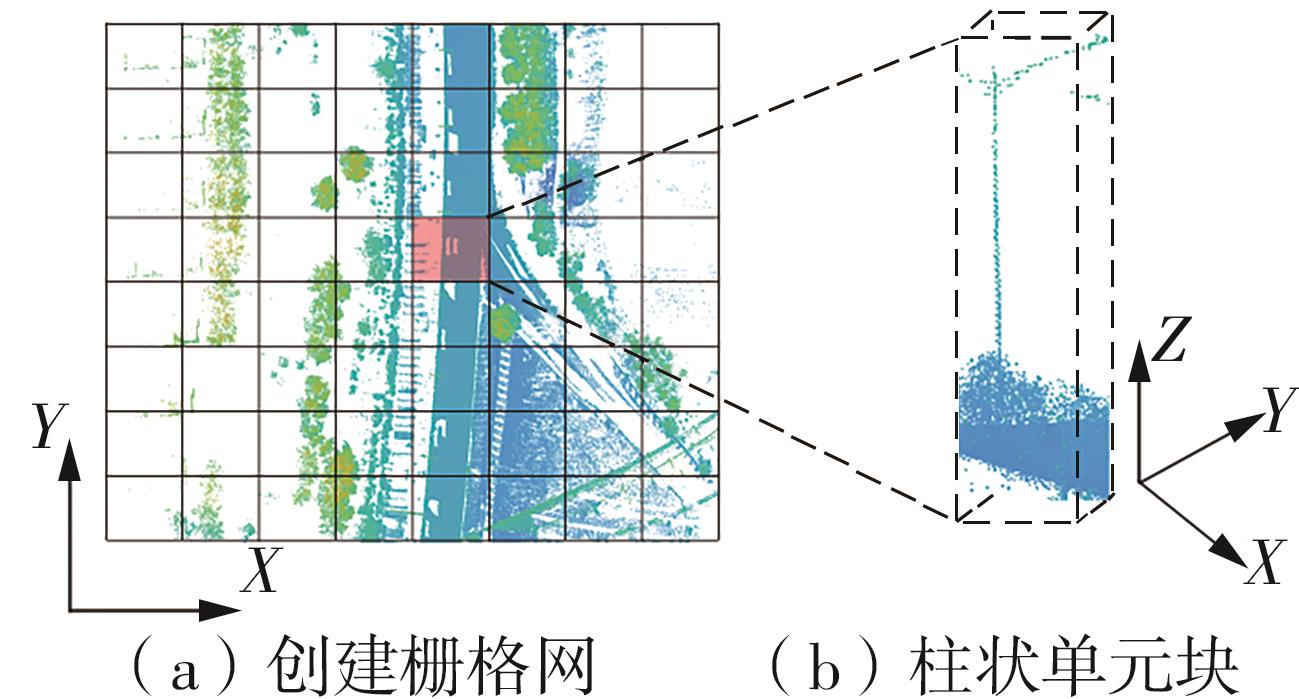

Fig. 4
Elevation filtering diagram"
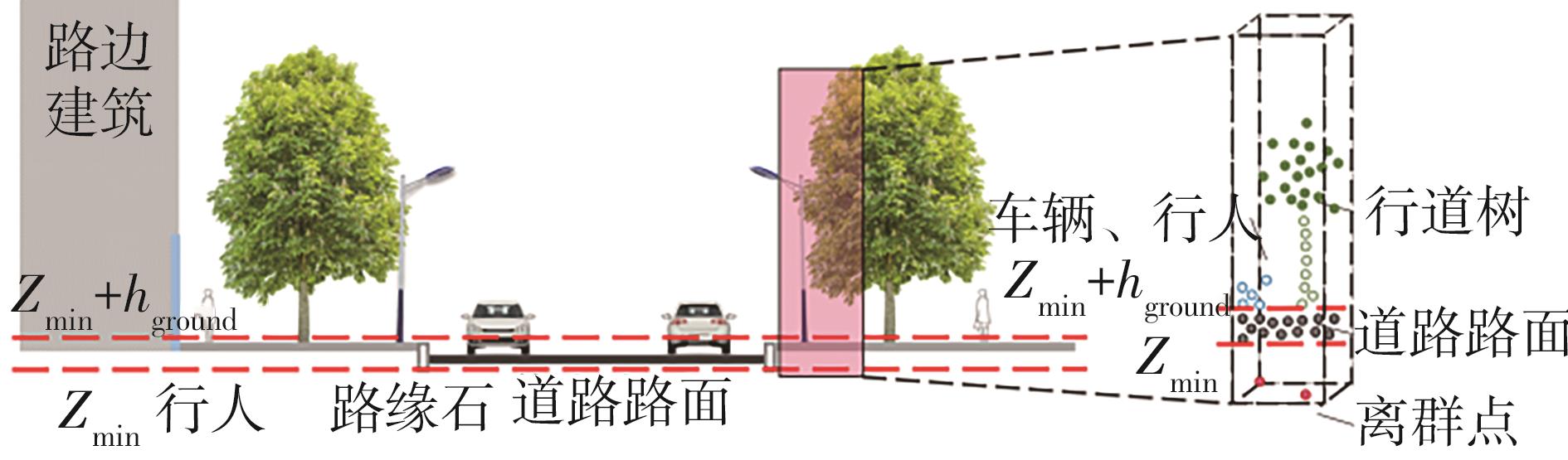
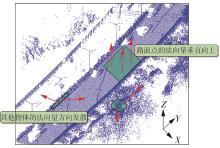
Fig. 5
Filter out ground points according to the normal vector"
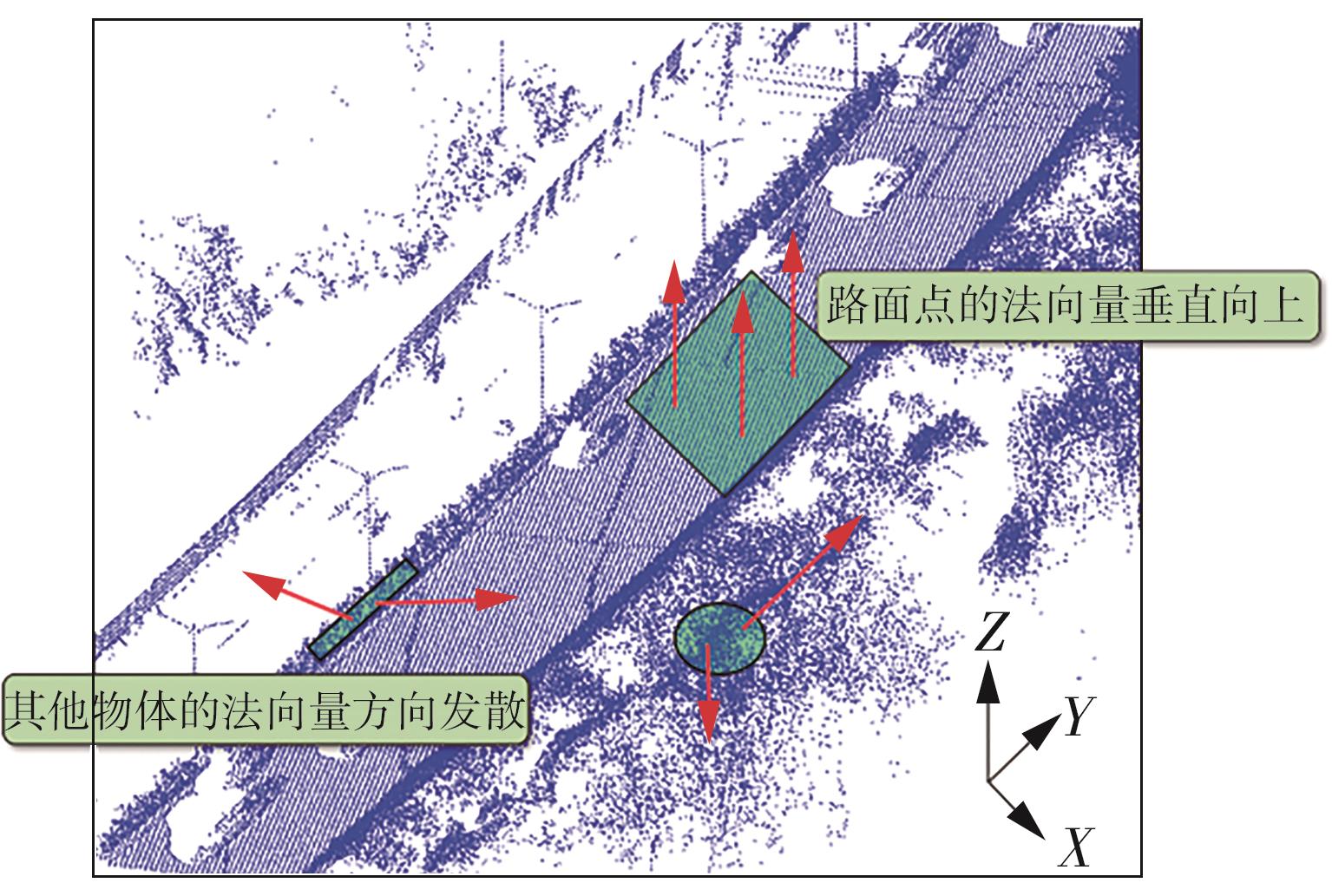
Fig. 6
Comparison before and after normal vector filtering"
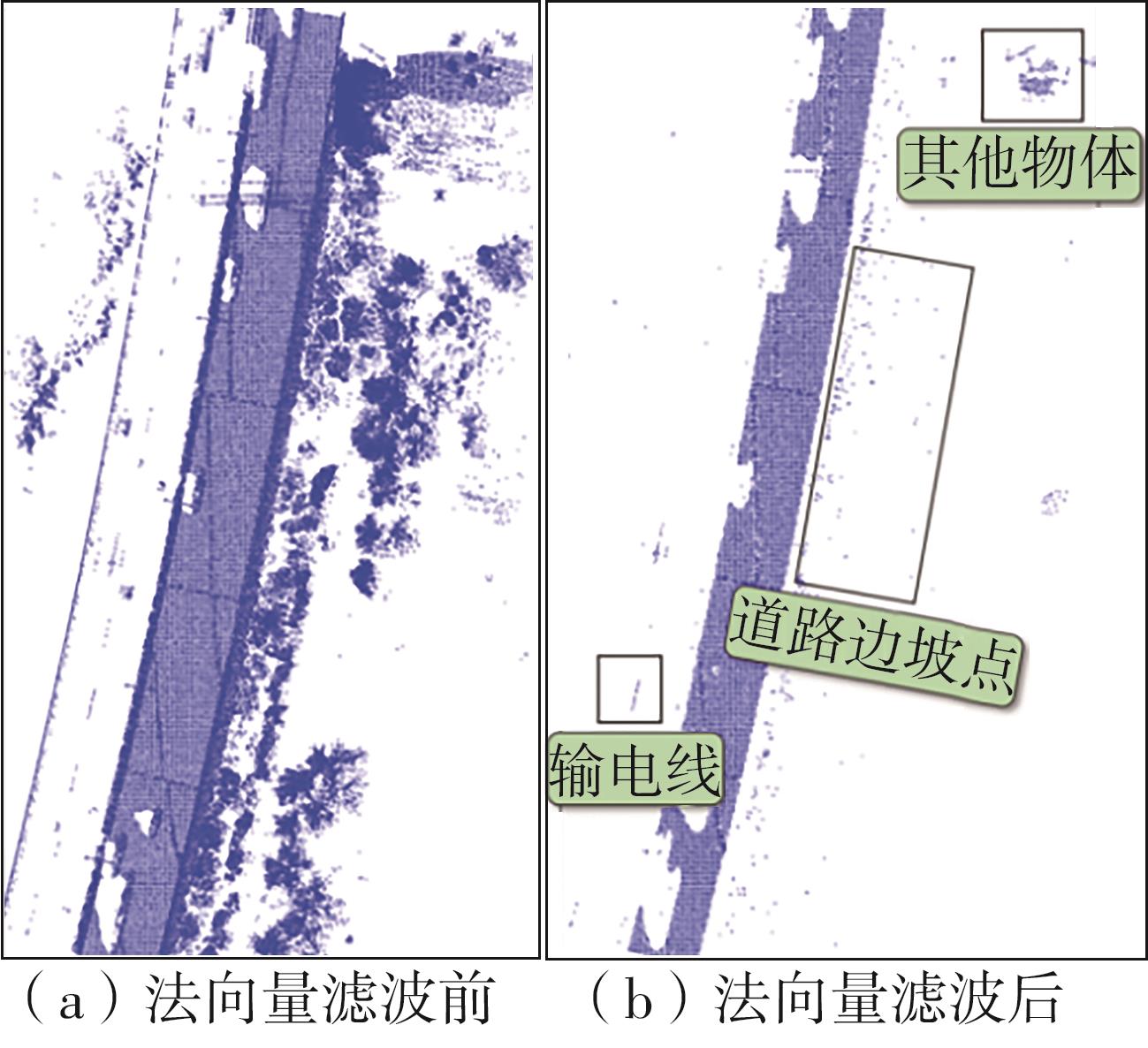

Fig. 7
Principle diagram of the DBSCAN"

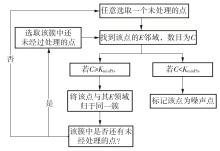
Fig. 8
Flow chart of DBSCAN"
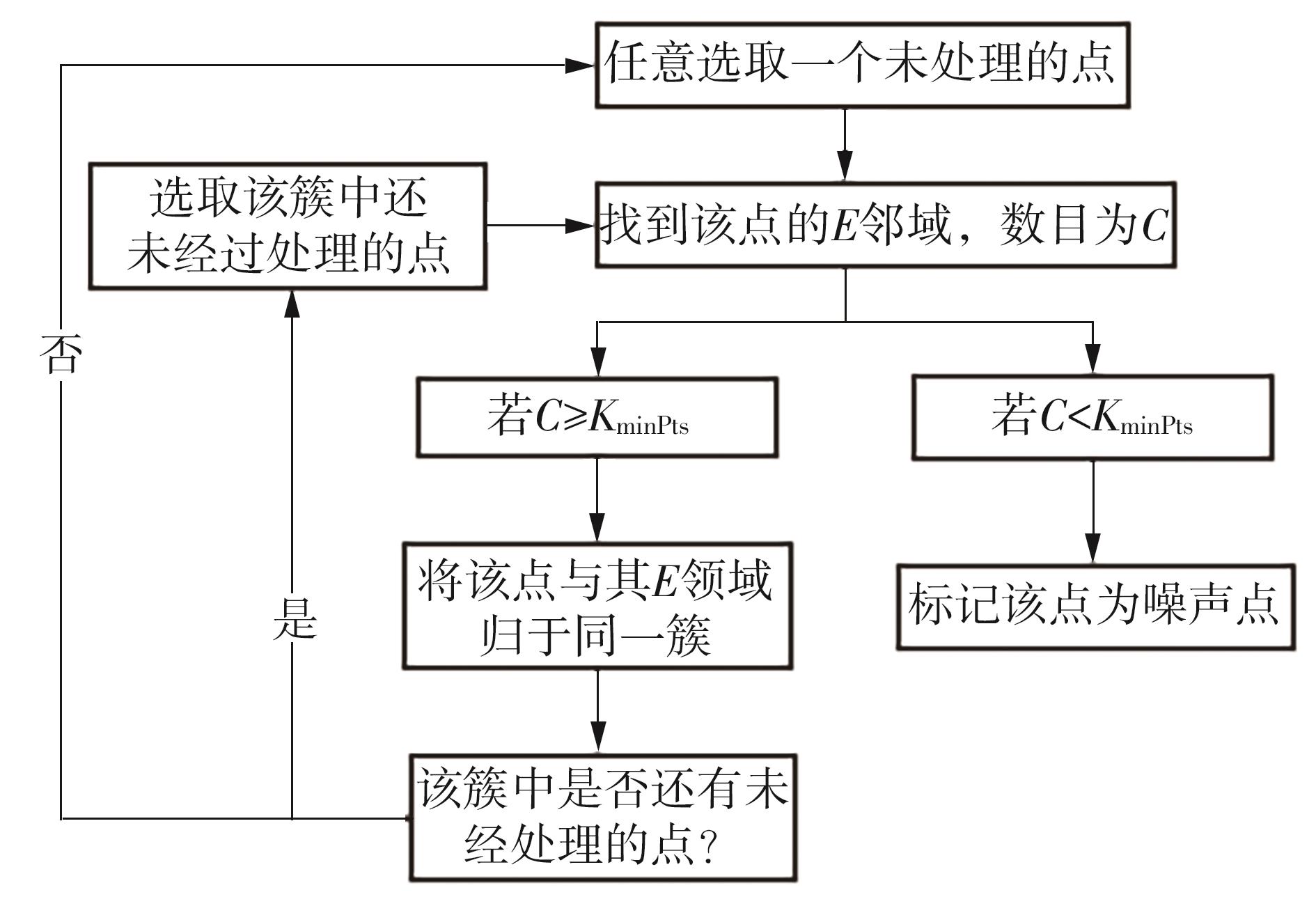
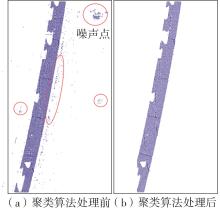
Fig. 9
Comparison before and after DBSCAN clustering"


Fig. 10
Workflow of the road geometry information extraction"
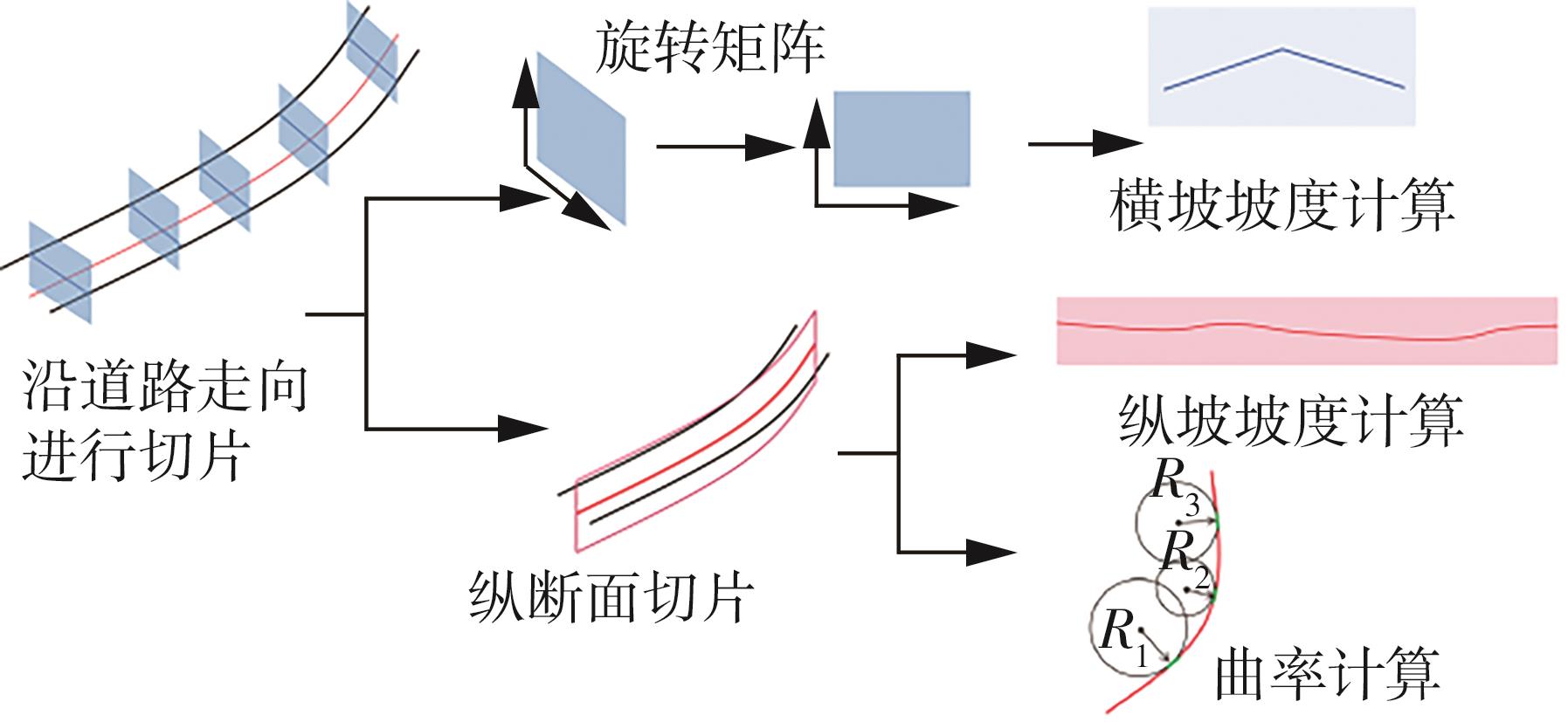
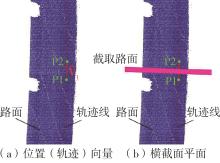
Fig. 11
Cross section of road surface"
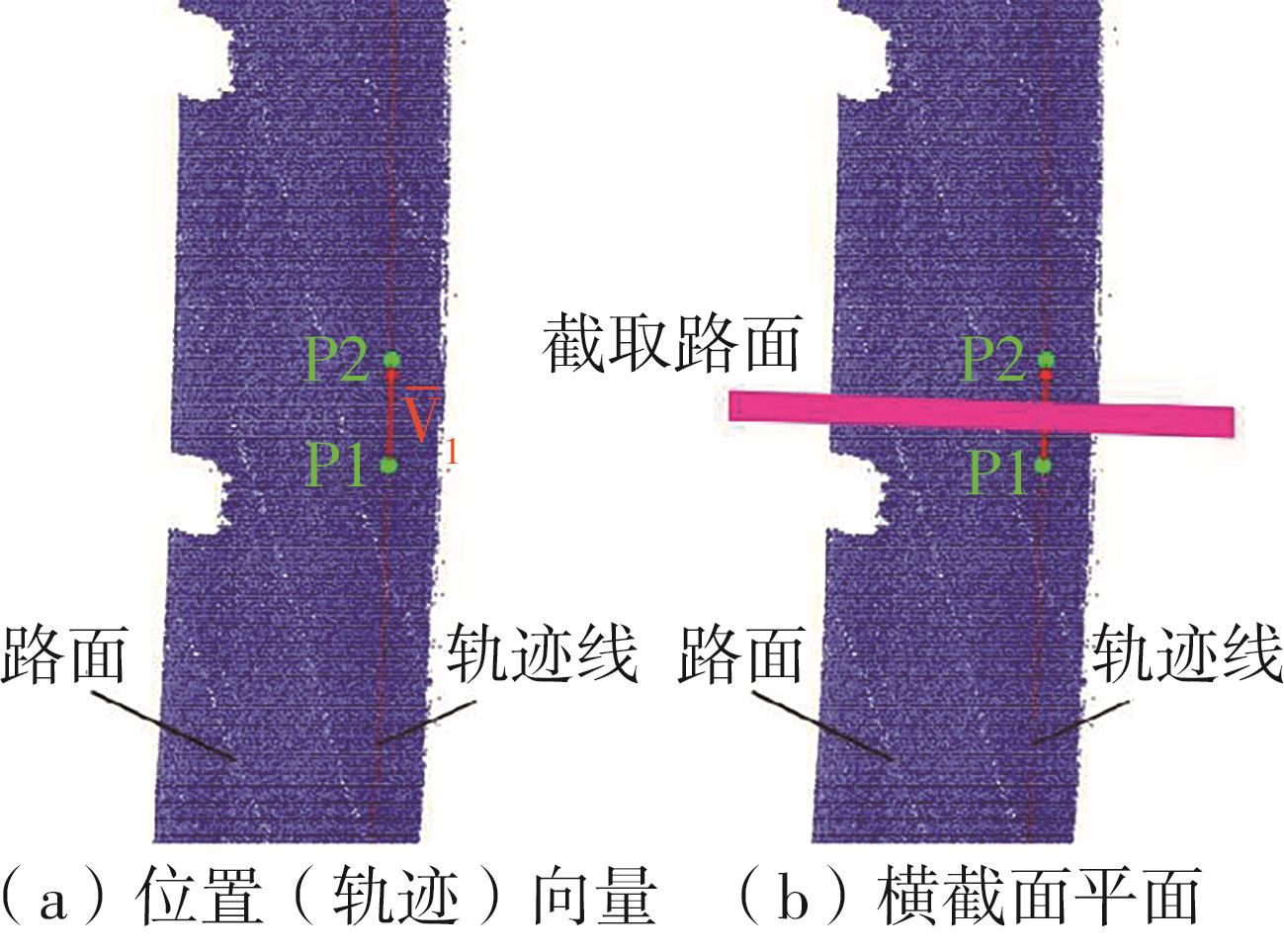
Fig. 12
A slice of road surface"

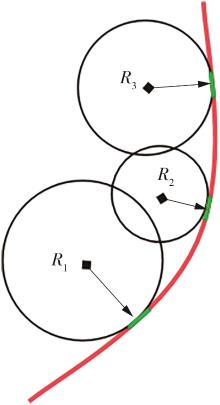
Fig. 13
Curvature fitting diagram"
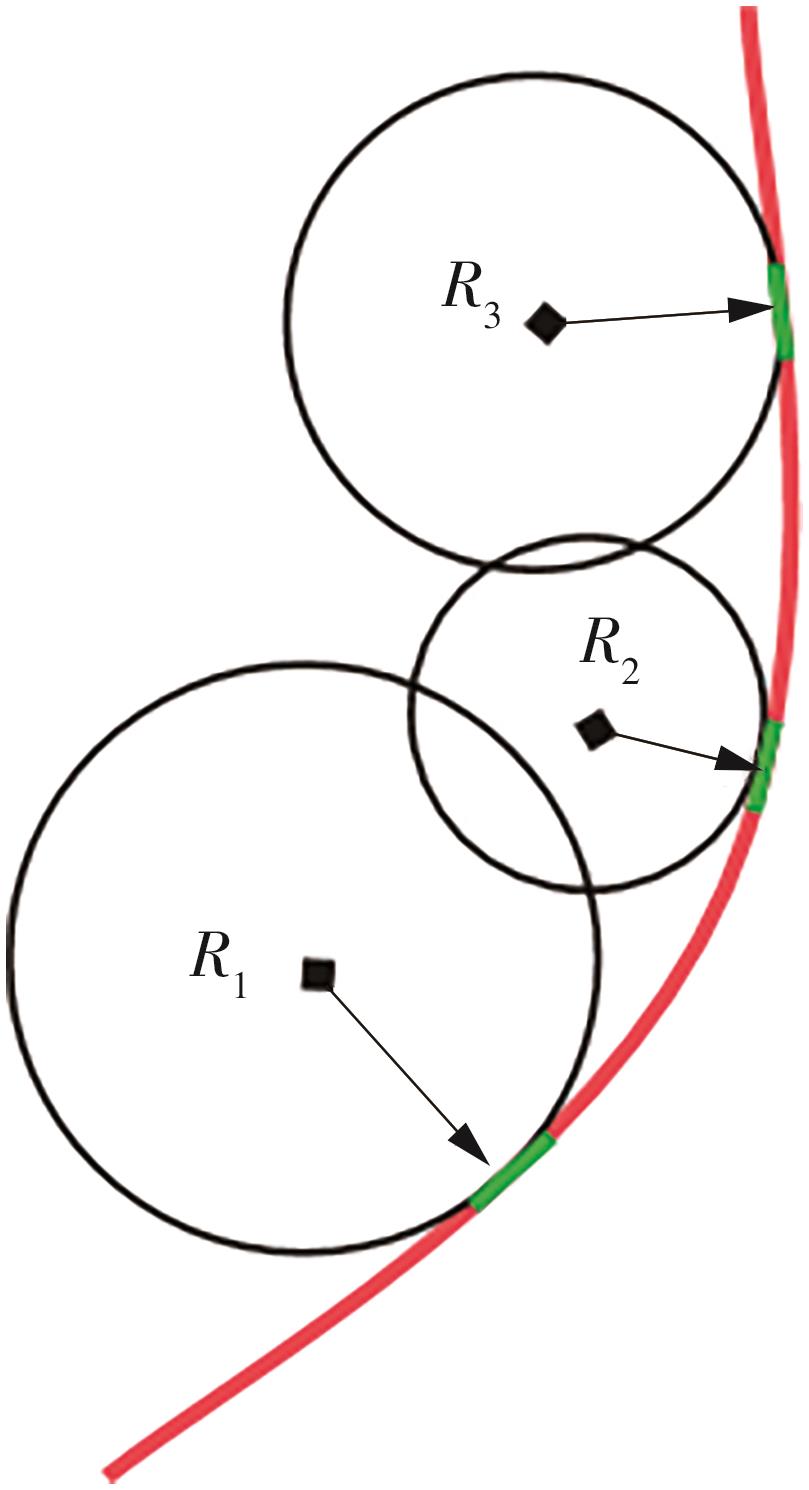
Table 1
Basic information of experimental data"
| 实验数据 | 道路环境 | 平面范围/m2 | 点个数/104 | 路线长度/km |
|---|---|---|---|---|
| 数据集1 | 郊区公路 | 1 710×2 693 | 1 000 | 4.5 |
| 数据集2 | 复杂街区 | 535×1 149 | 781 | 0.6 |
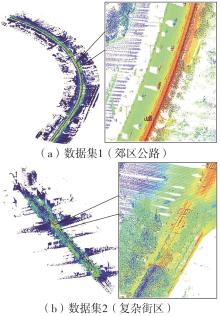
Fig. 14
Point cloud intensity rendering"
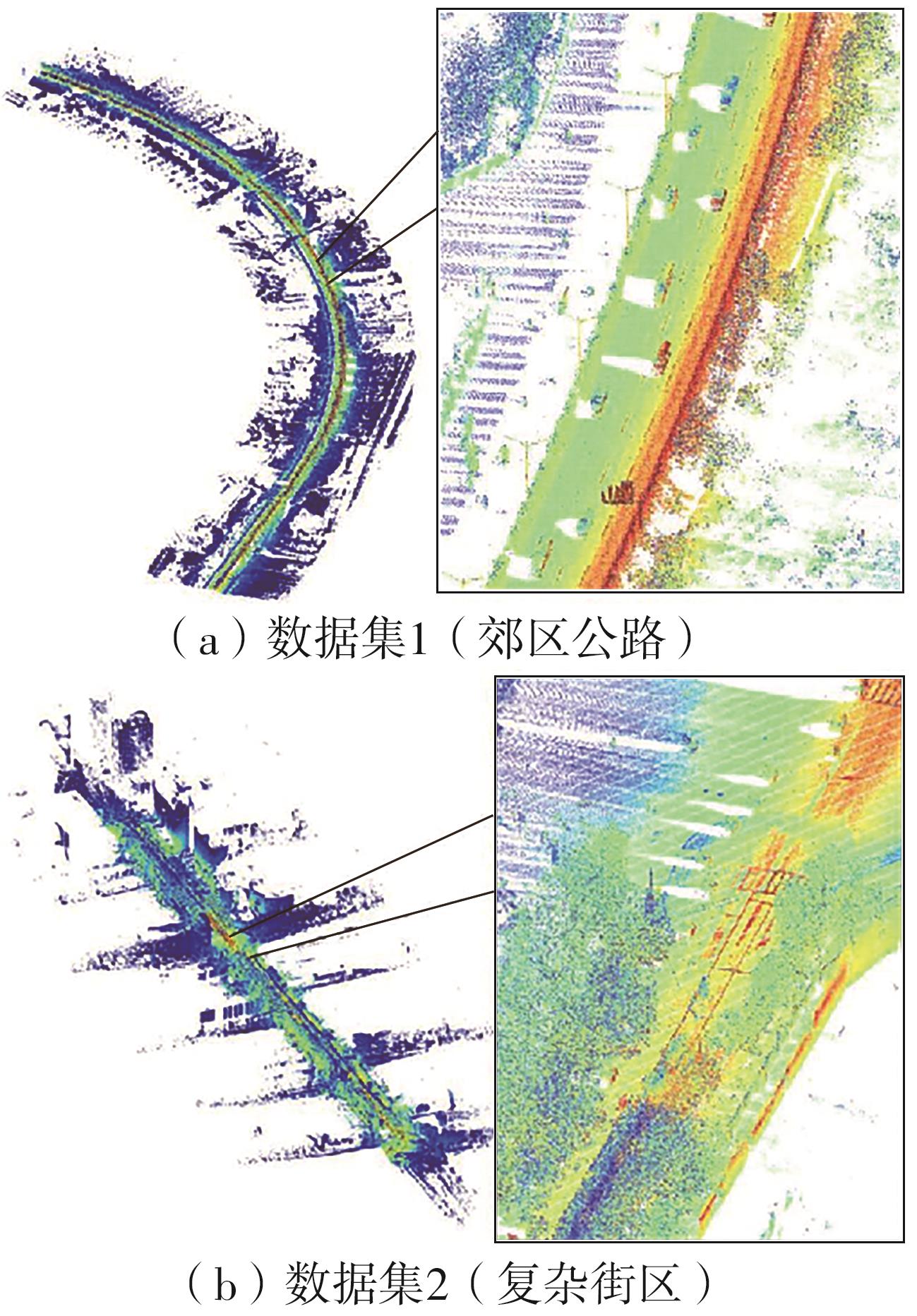

Fig. 15
Data set 1 (suburban highway) road surface extraction results"
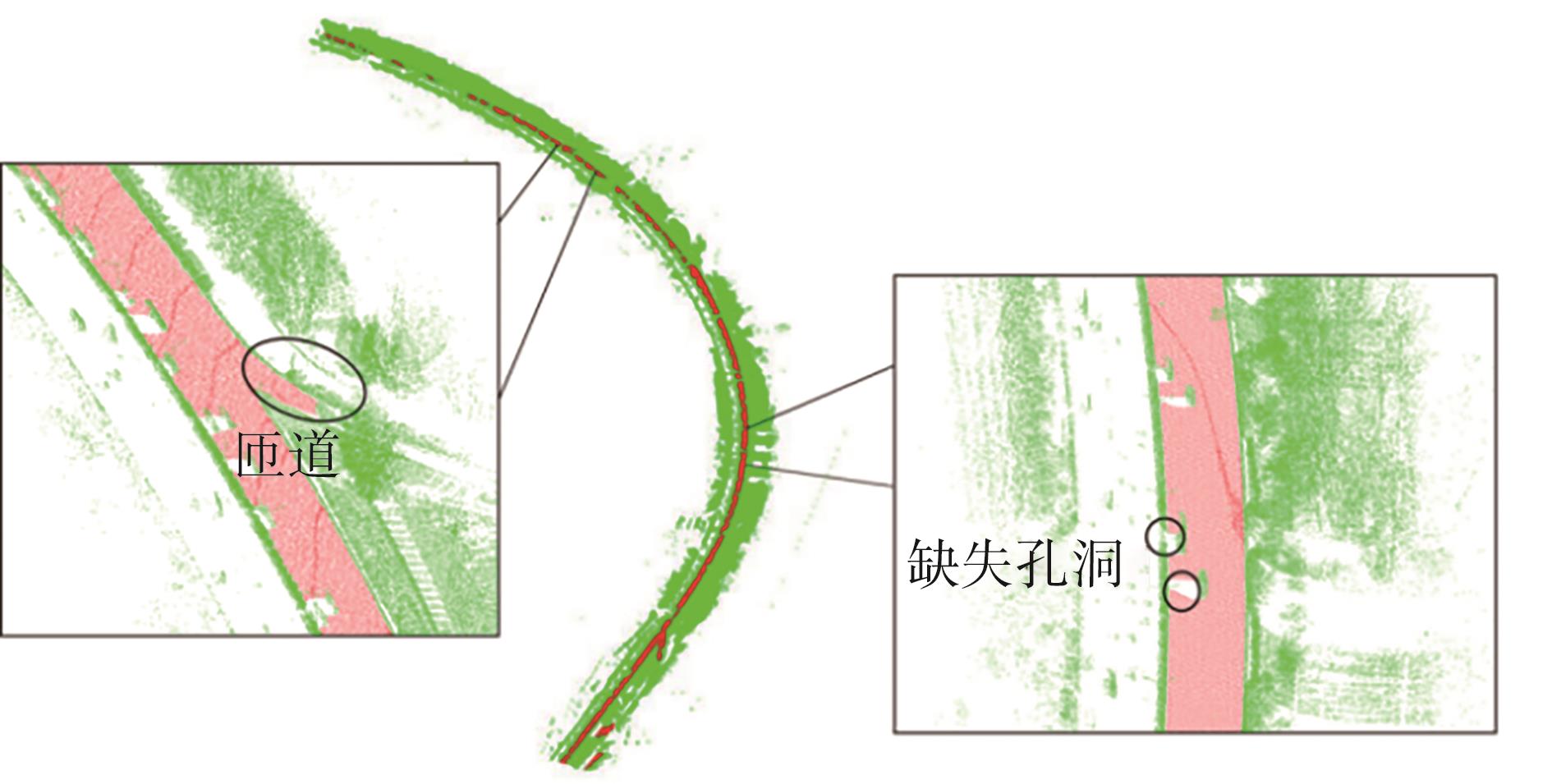
Fig.16
Data set 2 (complex blocks) road surface extraction results"

Table 2
Precision analysis of road surface extraction results"
| 实验数据 | 准确性p/% | 完整性r/% | 提取质量q/% |
|---|---|---|---|
| 数据集1 | 87.49 | 98.95 | 86.67 |
| 数据集2 | 95.15 | 97.37 | 92.77 |
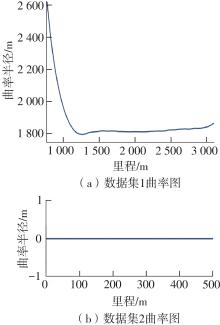
Fig. 17
Road curvature change diagram"

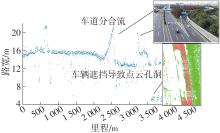
Fig. 18
Road width of data set 1"
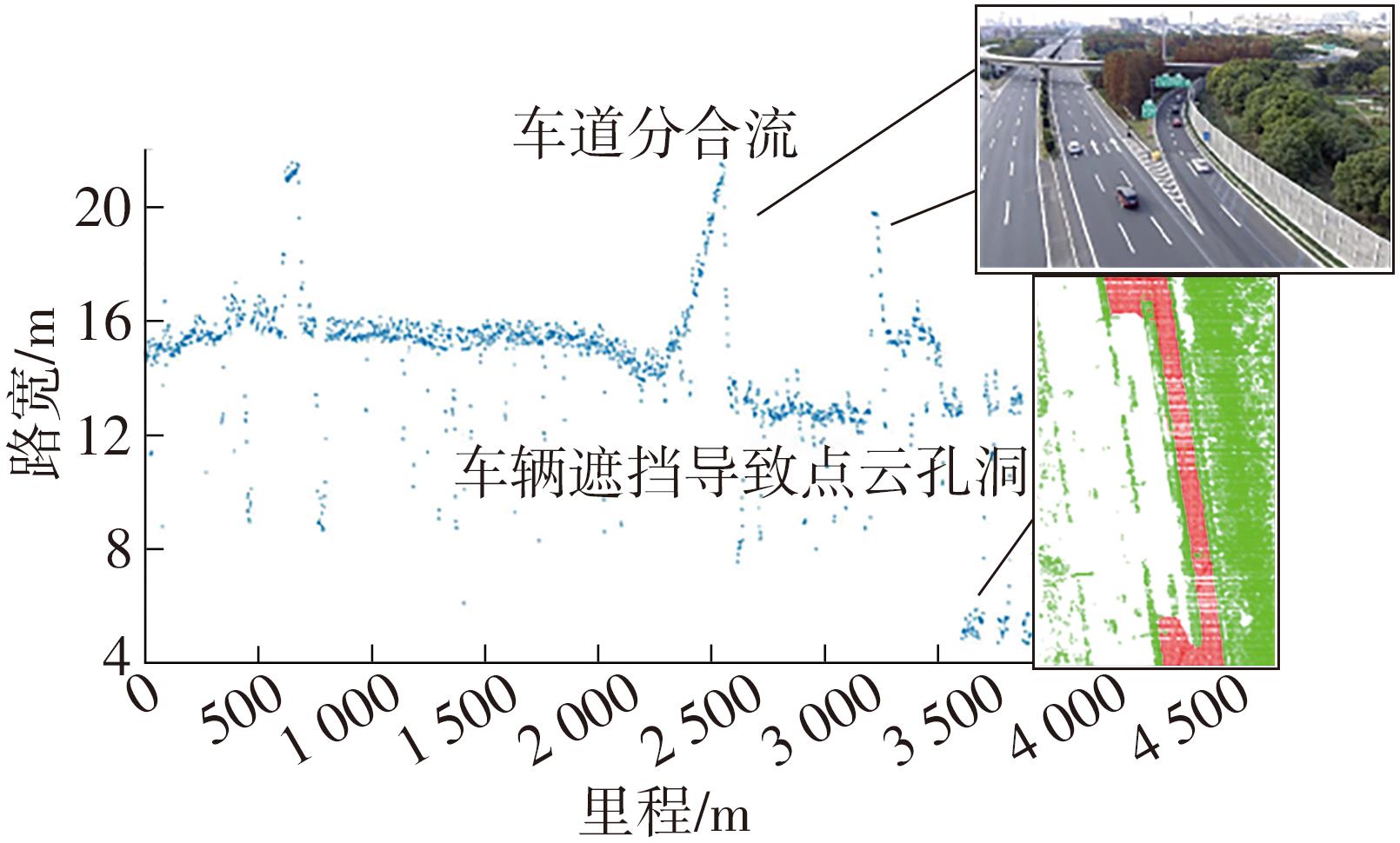
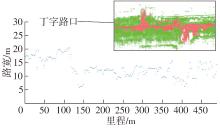
Fig. 19
Road width of data set 2"
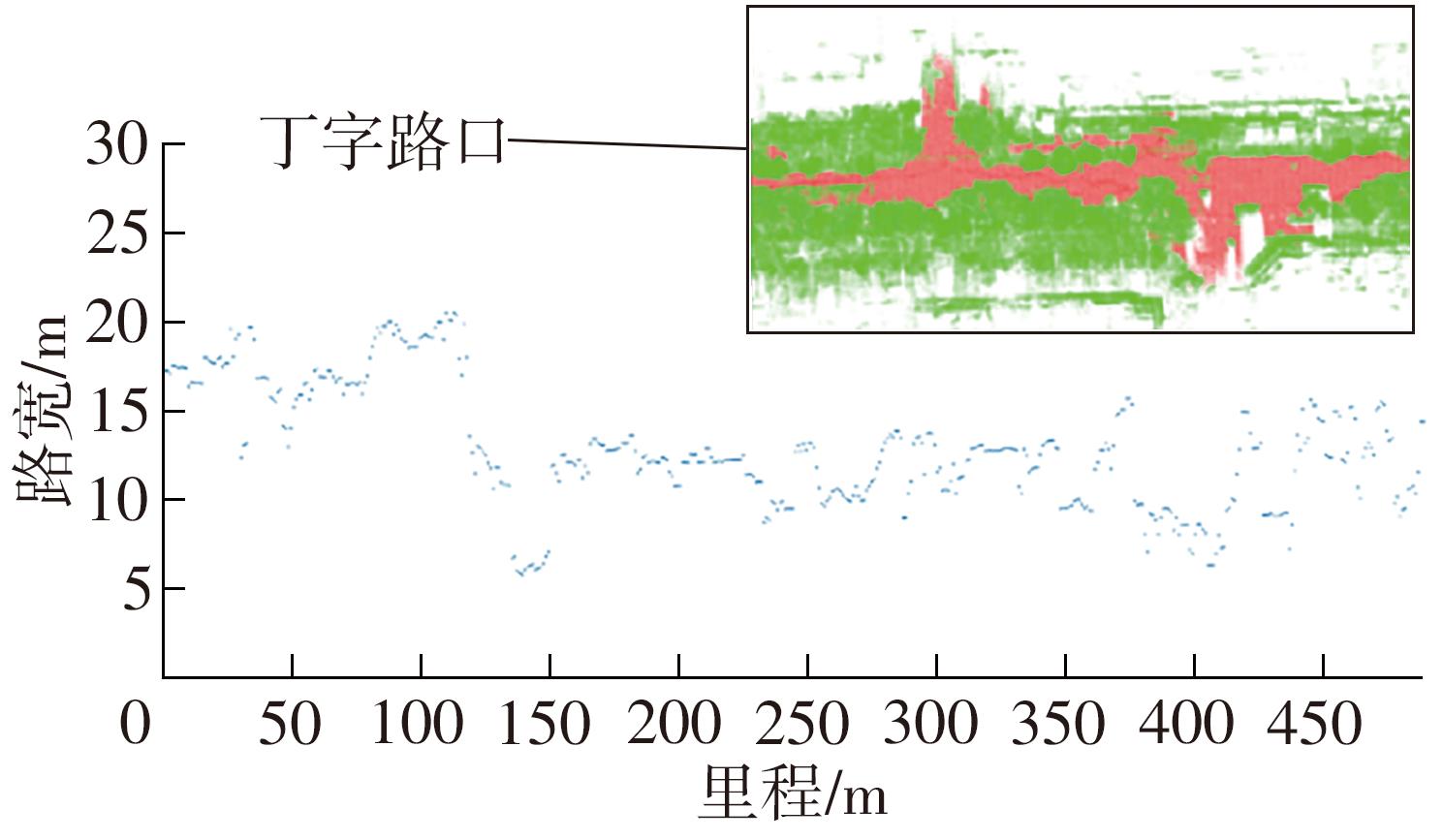
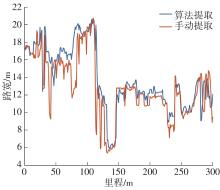
Fig. 20
Comparison between algorithm extraction and manual extraction of data set 2"
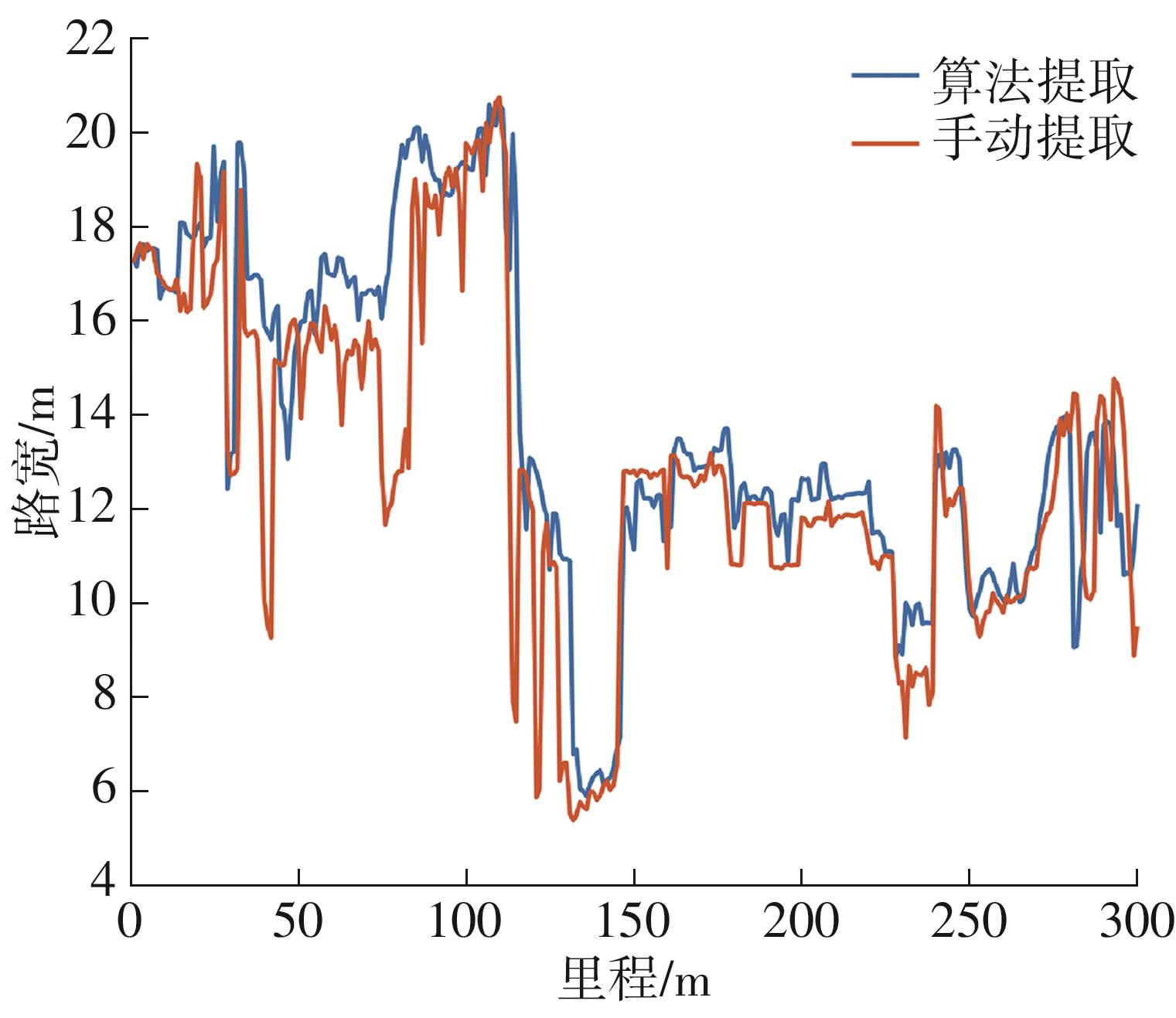
Table 3
Partial road width results of algorithm extraction and manual extraction of data set 2"
| 桩号 | 算法提取的路宽/m | 手动提取的路宽/m | 相对误差 |
|---|---|---|---|
| 10 | 16.492 | 16.954 | 0.027 |
| 20 | 17.775 | 17.888 | 0.006 |
| 30 | 12.457 | 13.260 | 0.061 |
| 40 | 16.883 | 13.556 | 0.245 |
| 50 | 15.293 | 16.048 | 0.047 |
| 60 | 17.025 | 16.028 | 0.062 |
| 70 | 16.599 | 14.581 | 0.138 |

Fig. 21
Road longitudinal slope"
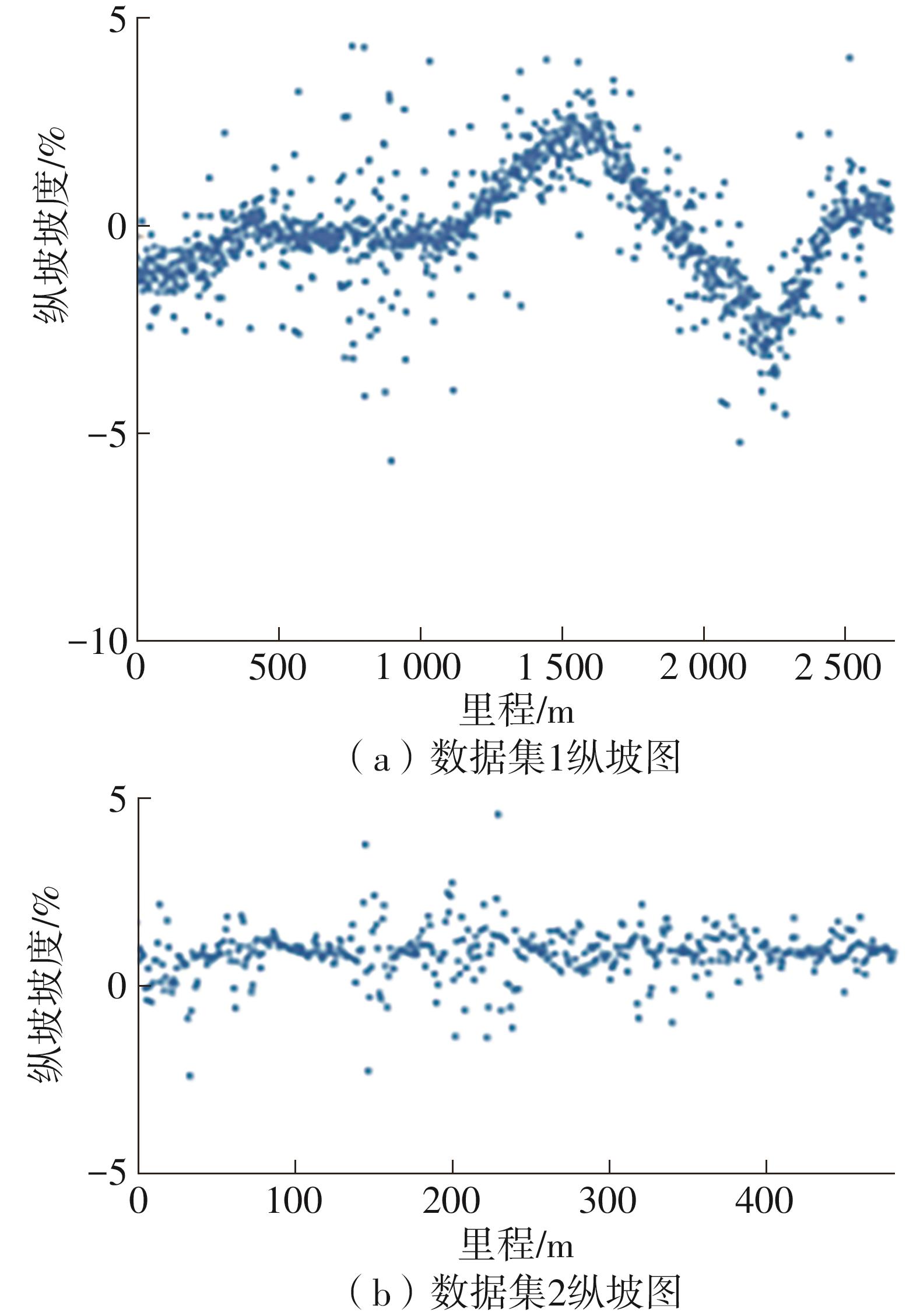
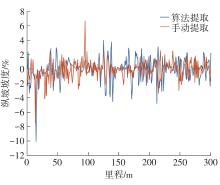
Fig. 22
Comparison of road longittudinal slope between algorithm extraction and manual extraction of data set 2"

Table 4
Partial road longitudinal slope results of algorithm extraction and manual extraction of data set 2"
| 桩号 | 算法提取的坡度/% | 手动提取的坡度/% | 相对误差 |
|---|---|---|---|
| 10 | -1.120 | -1.375 | 0.185 |
| 30 | -0.387 | -1.015 | 0.107 |
| 50 | -1.135 | 13.260 | 0.135 |
| 70 | 0.733 | 0.767 | 0.048 |
| 90 | 0.269 | 0.222 | 0.215 |
| 110 | 1.011 | 0.944 | 0.070 |
| 130 | -1.226 | -1.667 | 0.264 |
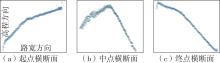
Fig. 23
Superelevation change segment of data set 1"
Fig. 24
Data set 2 crown cross slope"


Fig. 25
Range-cross slope diagram of data set 1"
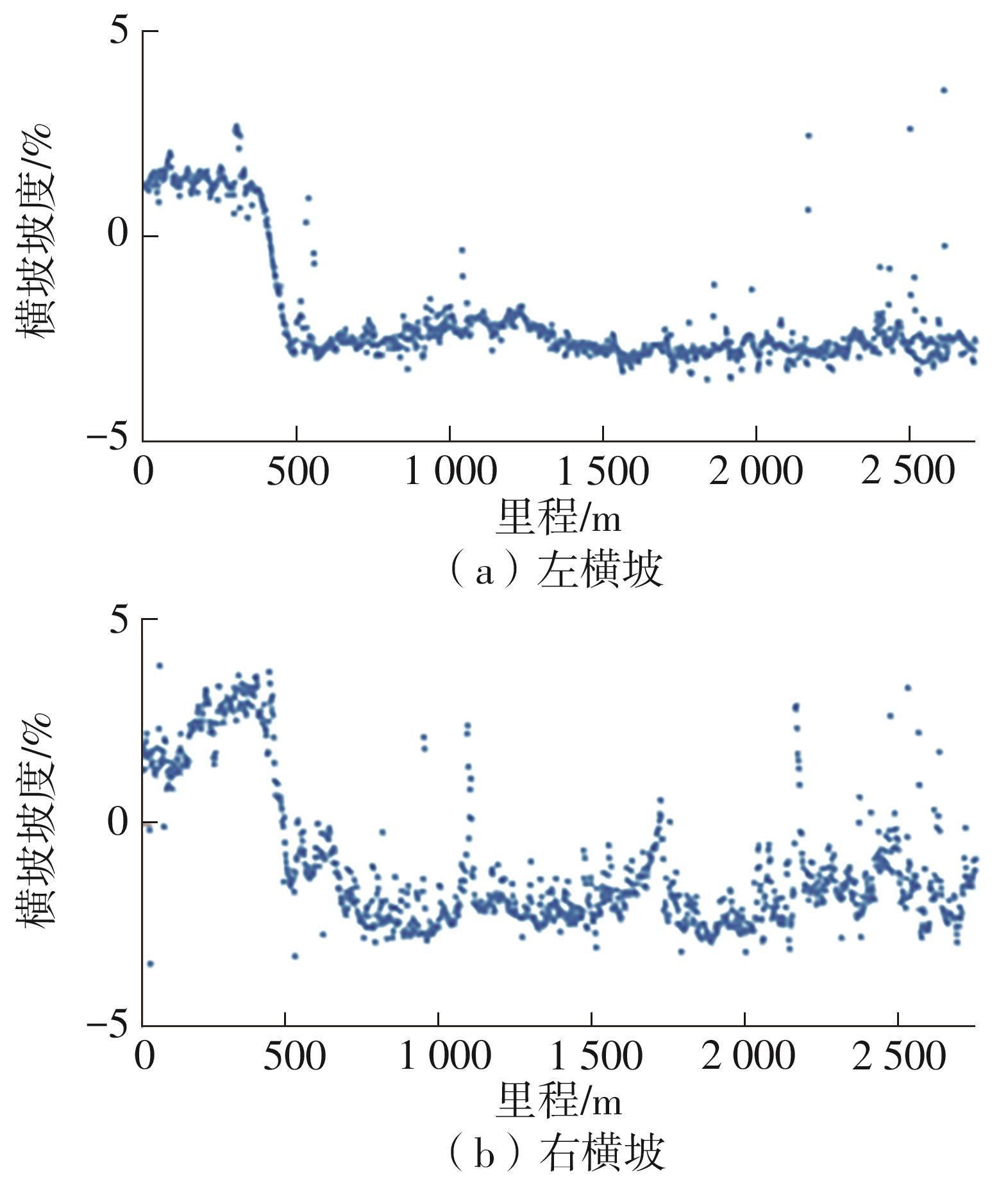

Fig. 26
Range-cross slope diagram of data set 2"
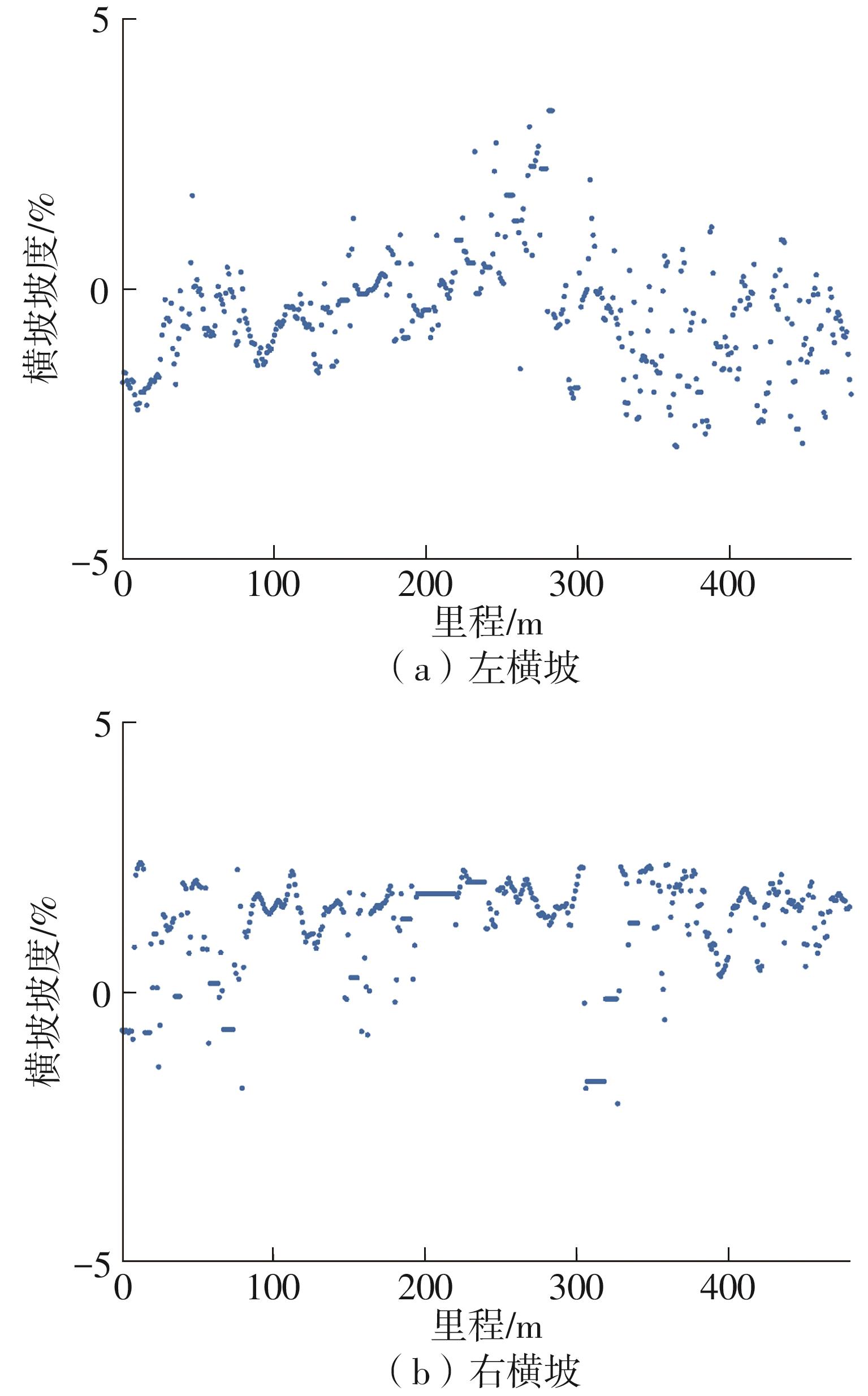
Fig. 27
Comparison road cross slope between algorithm extraction and manual extraction of data set 2"
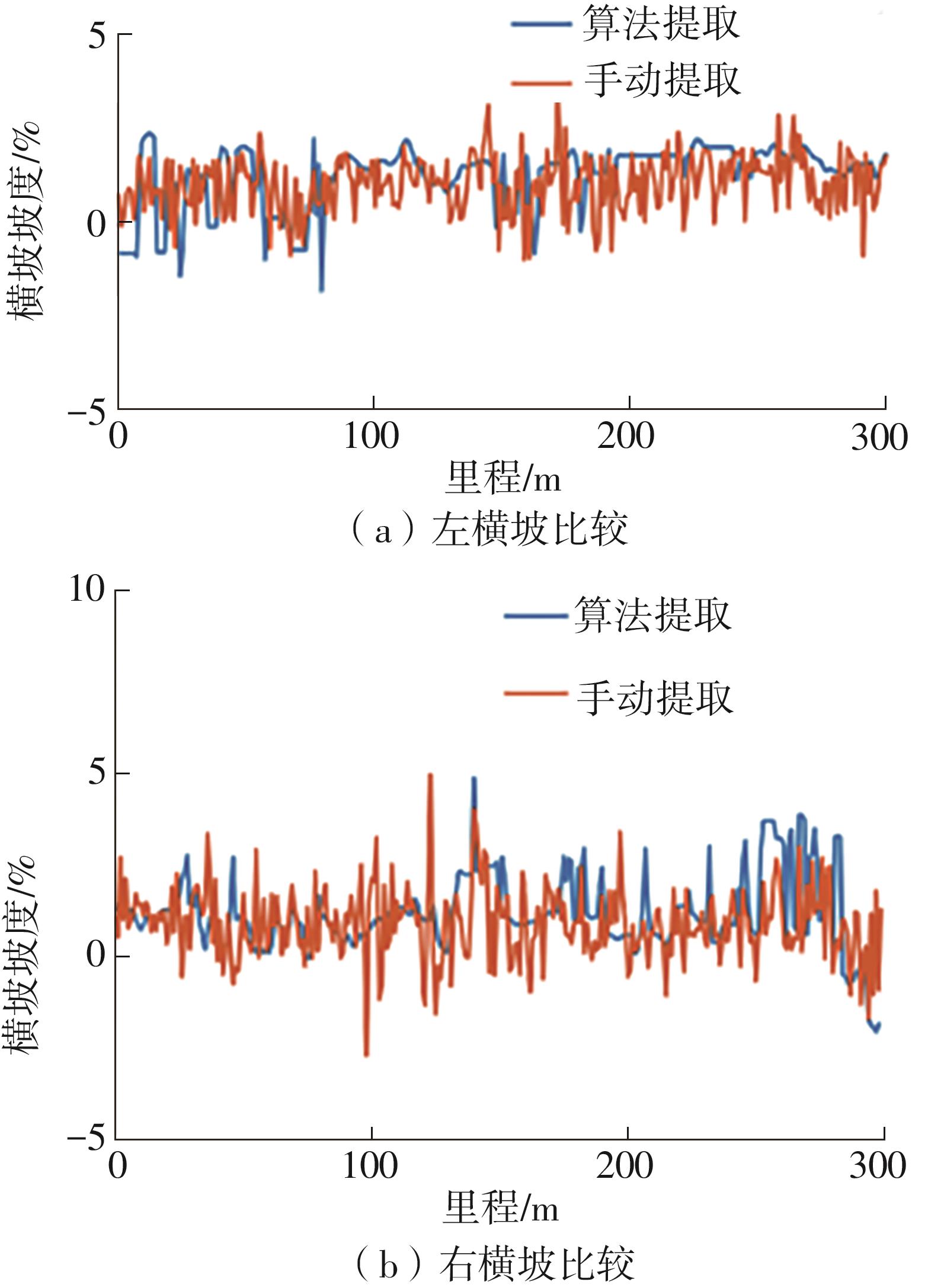
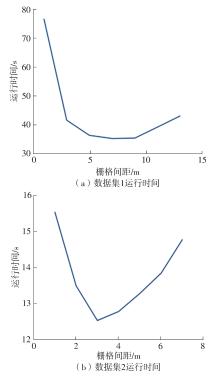
Fig. 28
Grid spacing and running time diagram"
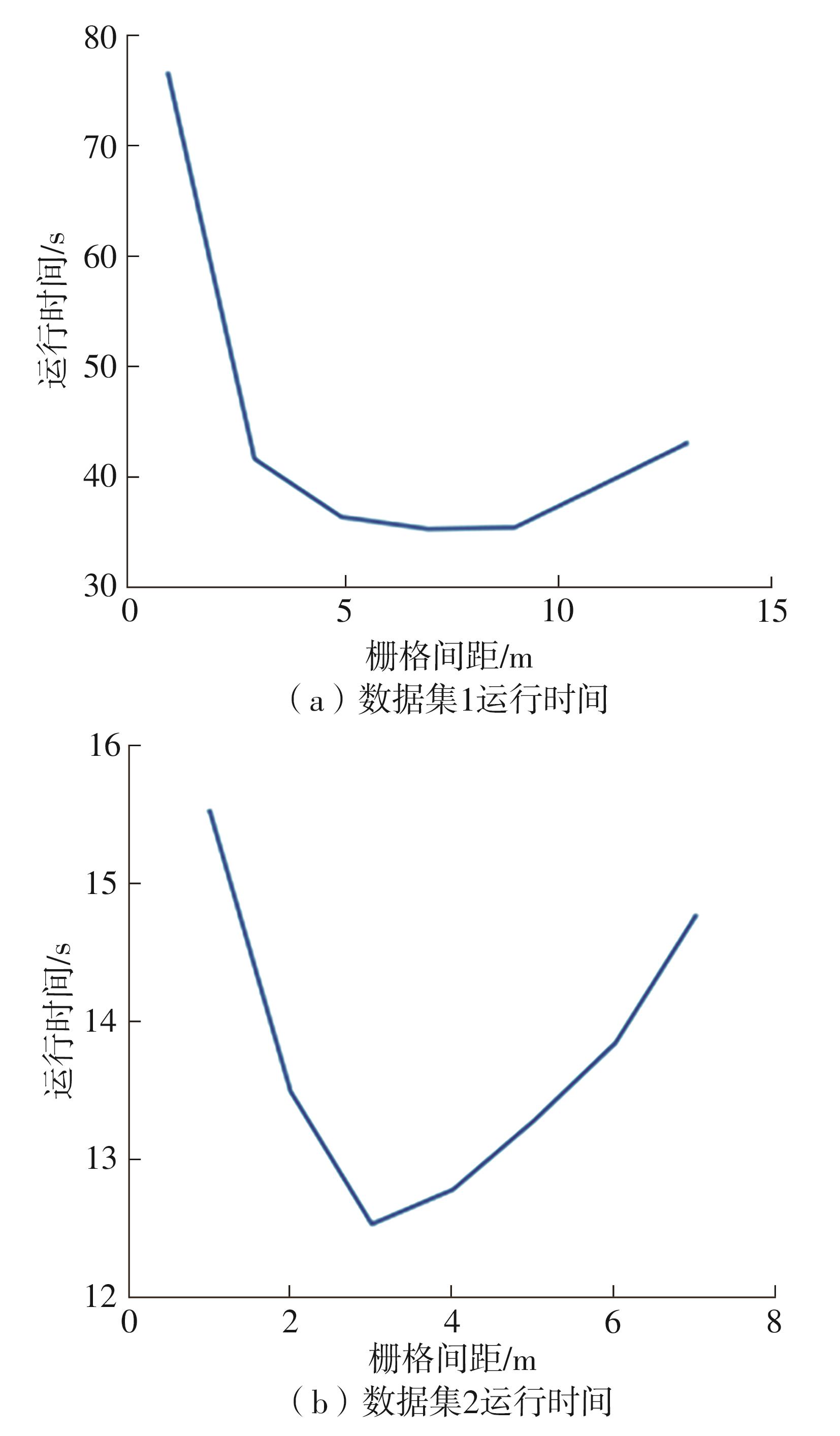
Table 5
Running time of each step of the algorithm"
| 实验数据 | 预处理/s | 路面提取/s | 几何信息计算/s | 总时间/s | 平均时间/(s·km-1) |
|---|---|---|---|---|---|
| 数据集1 | 3.230 | 19.863 | 7.795 | 30.888 | 6.864 |
| 数据集2 | 0.303 | 5.238 | 0.506 | 6.047 | 10.078 |
| 1 | KUMAR P, MCELHINNEY C, LEWIS P,et al .An automated algorithm for extracting road edges from terrestrial mobile LiDAR data [J].ISPRS Journal of Photogrammetry and Remote Sensing,2013,85:44-55. |
| 2 | YANG B, LIU Y, DONG Z,et al .3D local feature BKD to extract road information from mobile laser scanning point clouds [J].ISPRS Journal of Photogrammetry and Remote Sensing,2017,130:329-343. |
| 3 | GARGOUM S, BASYOUNY B, SABBAGH J,et al .Automated highway sign extraction using lidar data [J].Transportation Research Record,2017,2643(1):1-8. |
| 4 | 方莉娜,杨必胜 .车载激光扫描数据的结构化道路自动提取方法[J].测绘学报,2013,42(2):260-267. |
| FAND Lina, YANG Bisheng .Automated extracting structural roads from mobile laser scanning point clouds [J].Acta Geodaetica et Cartographica Sinica,2013,42(2):260-267. | |
| 5 | MA Y, ZHENG Y B, EASA S,et al .Semi-automated Framework for generating cycling lane centerlines on roads with roadside barriers from noisy MLS data [J].ISPRS Journal of Photogrammetry and Remote Sensing,2020,167:396-417. |
| 6 | 许华荣,王晓栋,方遒 .基于B样条曲线模型的结构化道路检测算法[J].自动化学报,2011,37(3):270-275. |
| XU Huarong, WANG Xiaodong, FANG Xiu .Structure road detection algorithm based on b-spline curve model [J].Acta Automatica Sinica,2011,37(3):270-275. | |
| 7 | IBRAHIM S, LICHTI D .Curb-based street floor extraction from mobile terrestrial lidar point cloud [J].ISPRS-International Archives of the Photogrammetry,Remote Sensing and Spatial Information Sciences,2012,39:193-198. |
| 8 | BORJA R C, SILVERIO G C, CELESTINO O,et al .An approach to detect and delineate street curbs from MLS 3D point cloud data [J].Automation in Construction,2015,51:103-112. |
| 9 | YADAV M, HUSAIN A, SINGH A,et al .Pole-shared object detection using mobile lidar data in rural road environments [J].ISPRS Annals of Photogrammetry,Remote Sensing and Spatial Information Sciences,2015,II-3/W5(1):11-16. |
| 10 | YADAV M, SINGH A, LOHANI B .Extraction of road surface from mobile LiDAR data of complex road environment [J].2017,38(16):4655-4682. |
| 11 | YADAV M, LOHANI B, SINGH A .Road surface detection from mobile LiDAR data [J].ISPRS Annals of Photogrammetry,Remote Sensing and Spatial Information Sciences,2018,IV-5 :95-101. |
| 12 | MA Y, ZHENG Y, CHENG J,et al .Real-time visualization method for estimating 3D highway sight distance using LiDAR data [J].Journal of Transportation Engineering,2019,145(4):04019006.1-04019006.14. |
| 13 | TSAI Y, AI C, WANG Z,et al .Mobile cross-slope measurement method using Lidar technology [J].Transportation Research Record,2013,2367(1):53-59. |
| 14 | BARCO A, RIVEIRO B, AGUILERA D,et al .Automatic inventory of road cross‐sections from mobile laser scanning system [J].Computer‐Aided Civil and Infrastructure Engineering,2017,32(1):3-17. |
| 15 | LUO W, LI L .Automatic geometry measurement for curved ramps using inertial measurement unit and 3D LiDAR system [J].Automation in Construction,2018,94:214-232. |
| 16 | GARGOUM S, BASYOUNY K, SABBAGH J .Automated extraction of horizontal curve attributes using LiDAR data [J].Transportation Research Record Journal of the Transportation Research Board,2018,83:1-18. |
| 17 | HUSAIN A, VAISHYA A .Road surface and its center line and boundary lines detection using terrestrial Lidar data [J].The Egyptian Journal of Remote Sensing and Space Sciences,2017,21(3):363-374. |
| 18 | JIANG X, BUNKE H .Edge detection in range images based on scan line approximation [J].Computer Vision & Image Understanding,1999,73(2):183-199. |
| 19 | 马东岭,王晓坤,李广云 .一种基于高度差异的点云数据分类方法[J].测绘通报,2018(6):46-49. |
| MA Dongling, WANG Xiaokun, LI Guangyun .Research on the classification method of point cloud based on elevation difference [J].Bulletin of Surveying and Mapping,2018(6):46-49. | |
| 20 | GARGOUM S, BASYOUNY K, FROESE K .A fully automated approach to extract and assess road cross sections from mobile LiDAR Data [J].Journal of Robotics & Machine Learning,2018,19(11):219. |
| 21 | GUAN H, LI J, YU Y,et al .Using mobile laser scanning data for automated extraction of road markings [J].Isprs Journal of Photogrammetry & Remote Sensing,2014,87(jan.):93-107. |
| 22 | MA Y, ZHENG Y B, EASA S,et al .Automated method for detection of missing road point regions in mobile laser scanning data [J].International Journal of Geo-Information,2019,8(12):525. |
| [1] | LI Baijian, HUANG Yan, FU Xinsha. Influence of Shapes of Corrugated Steel Plate on Load-Carrying Capacity of Reinforced Concrete Slab Culvert and Arch Effect with Lateral Restraint [J]. Journal of South China University of Technology(Natural Science Edition), 2024, 52(1): 110-118. |
| [2] | MAO Xuesong, WANG Yueyue, WU Qian, et al. Structure Evolution Law of Soil-Rock Mixture Fillers with Different Gradations Under Seepage [J]. Journal of South China University of Technology(Natural Science Edition), 2023, 51(2): 65-75. |
| [3] | LAN Fengchong, ZHANG Yue, CHEN Jiqing, et al. Correlation Analysis and Prediction of Pedestrian Casualty Risk in Car-Pedestrian Collision Accident [J]. Journal of South China University of Technology(Natural Science Edition), 2022, 50(5): 1-10. |
| [4] | ZHANG Chi, REN Shipeng, WANG Bo, et al. Speed Characteristics and Prediction of Trucks on Long and Steep Downgrade Sections [J]. Journal of South China University of Technology(Natural Science Edition), 2022, 50(3): 38-49. |
| [5] | FU Guozhi, WEI Jincheng, ZHAO Yanqing, et al. Influence of Asphalt Pavements' Dynamic Effects on the Surface Acceptance Deflection [J]. Journal of South China University of Technology (Natural Science Edition), 2021, 49(4): 90-96. |
| [6] | AI Changfa, HUANG Yangquan, LUO Liufen, et al. Estimation of Comprehensive Impact of External Factors on Interlayer Fatigue Life of Asphalt Pavement Based on ISS & SSDR [J]. Journal of South China University of Technology (Natural Science Edition), 2020, 48(5): 58-66,74. |
| [7] | ZHANG Chi, HU Tao, LIN Xuancai, et al. Research on Exclusive Low-Speed Lane for Large Truck in Highway Continuous Long Downhill Section [J]. Journal of South China University of Technology (Natural Science Edition), 2020, 48(4): 104-113. |
| [8] | LI Baijian ZHU Liangsheng FU Xinsha LI Yong . Mechanical Properties of Two Kinds of Lined Reinforced Concrete Pipe Culvert [J]. Journal of South China University of Technology (Natural Science Edition), 2019, 47(6): 101-107. |
| [9] | ZHU Jianghong HAN Shuxian TONG Yanmei LI Yan YU Rongguang ZHANG Huyuan. Effect of Dry-Wet Cycles on the Deterioration of Sandstone with Various Initial Dry Densities [J]. Journal of South China University of Technology (Natural Science Edition), 2019, 47(3): 126-134. |
| [10] | ZHANG Chi HOU Yudi QIN Jihan ZHANG Hong. Safety Design Method of Long Slope Downhill Slope Based on Temperature Increase of Brake Drum [J]. Journal of South China University of Technology(Natural Science Edition), 2019, 47(10): 139-150. |
| [11] | LI Baijian FU Xinsha ZHU Liangsheng. Research on Mechanical Properties of Corrugated Steel Plate with Relieving Slab Based on Equivalent Stiffness#br# [J]. Journal of South China University of Technology(Natural Science Edition), 2018, 46(9): 131-139. |
| [12] | LI Baijian ZHU Liangsheng FU Xinsha . Numerical Analysis of Corrugated Steel Plate - Composite Beam Structure Based On Equivalent Stiffness Method [J]. Journal of South China University of Technology (Natural Science Edition), 2018, 46(12): 111-120. |
| [13] | SHEN Aiqin SONG Pan GUO Yinchuan LI Peng. Numerical Simulation Analysis of Transient Hydrodynamic Pressure on the Road Surface Based on COMSOL Multiphysics [J]. Journal of South China University of Technology (Natural Science Edition), 2018, 46(11): 92-101. |
| [14] | XIAO Xin ZHANG Xiaoning. Study on the Influence of Anisotropy Air Voids Structure in Porous Asphalt Mixture on Seepage Characteristics [J]. Journal of South China University of Technology (Natural Science Edition), 2018, 46(1): 91-96. |
| [15] | ZHANG Li-juan XU Zhong-zheng ZHONG Qing-wen. Reinforcement Design of BFRP-Reinforced Continuously-Reinforced Concrete Pavement [J]. Journal of South China University of Technology (Natural Science Edition), 2017, 45(4): 74-80. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||