Journal of South China University of Technology(Natural Science Edition) ›› 2022, Vol. 50 ›› Issue (12): 109-123.doi: 10.12141/j.issn.1000-565X.220277
Special Issue: 2022年电子、通信与自动控制
• Electronics, Communication & Automation Technology • Previous Articles Next Articles
Review for UAV Acoustic Positioning
CHEN Peng CHEN Yang WANG Wei
- School of Information Engineering,Chang’an University,Xi’an 710061,Shaanxi,China
-
Received:2022-05-16Online:2022-12-25Published:2022-07-15 -
Contact:陈鹏(1992-),男,博士,讲师,主要从事声学信号处理、阵列信号处理研究。 E-mail:pchen@chd.edu.cn -
About author:陈鹏(1992-),男,博士,讲师,主要从事声学信号处理、阵列信号处理研究。 -
Supported by:the China Postdoctoral Science Foundation(2019M660049XB);the National Natural Science Foundation of China(61871059);the Key R&D Project of Shaanxi Province(2021KWZ-08)
CLC Number:
Cite this article
CHEN Peng, CHEN Yang, WANG Wei . Review for UAV Acoustic Positioning[J]. Journal of South China University of Technology(Natural Science Edition), 2022, 50(12): 109-123.
share this article

Fig.1
Time frequency diagram of UAV noise"
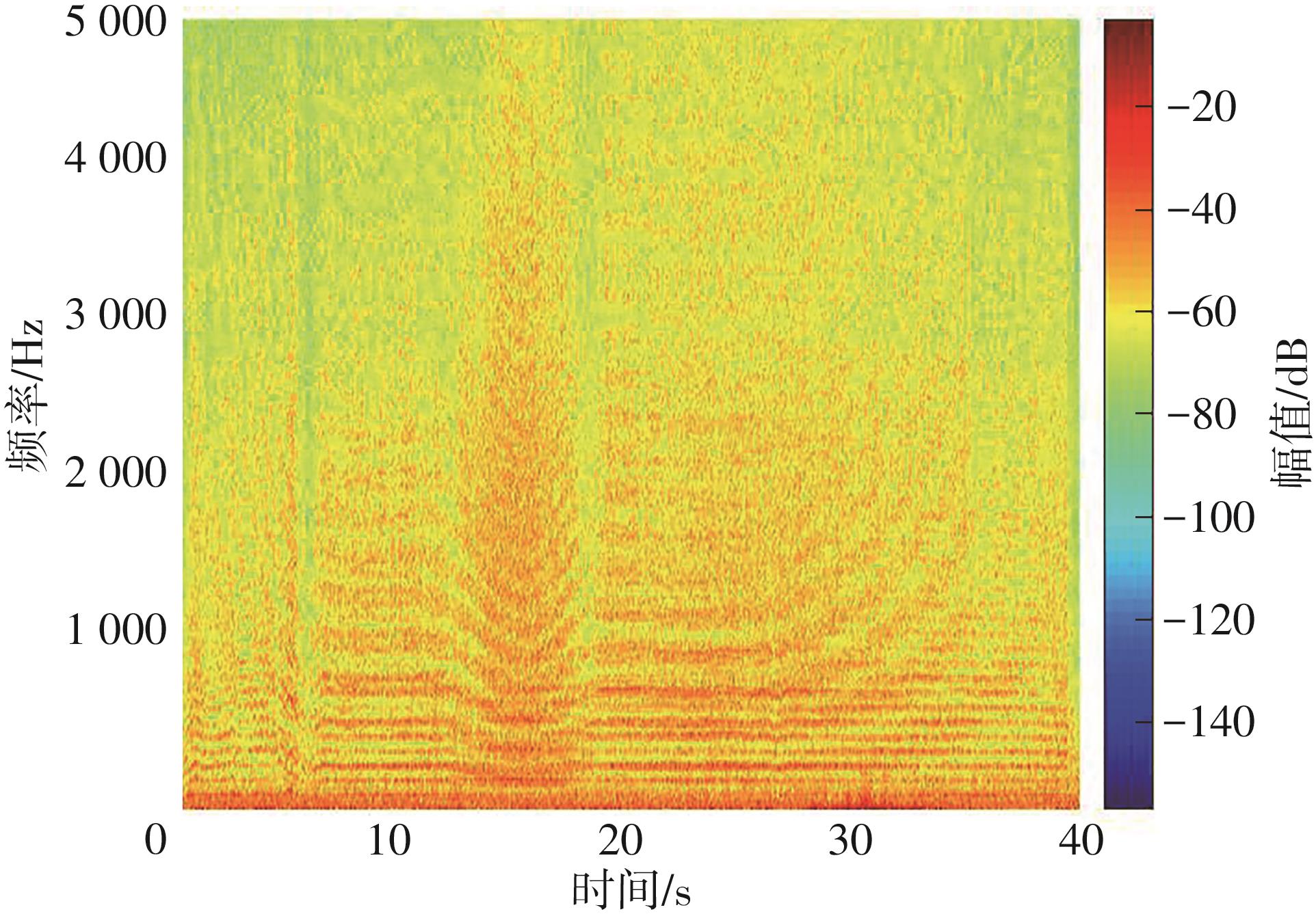
Fig.2
Spectrum of UAV noise within 1 000 Hz"
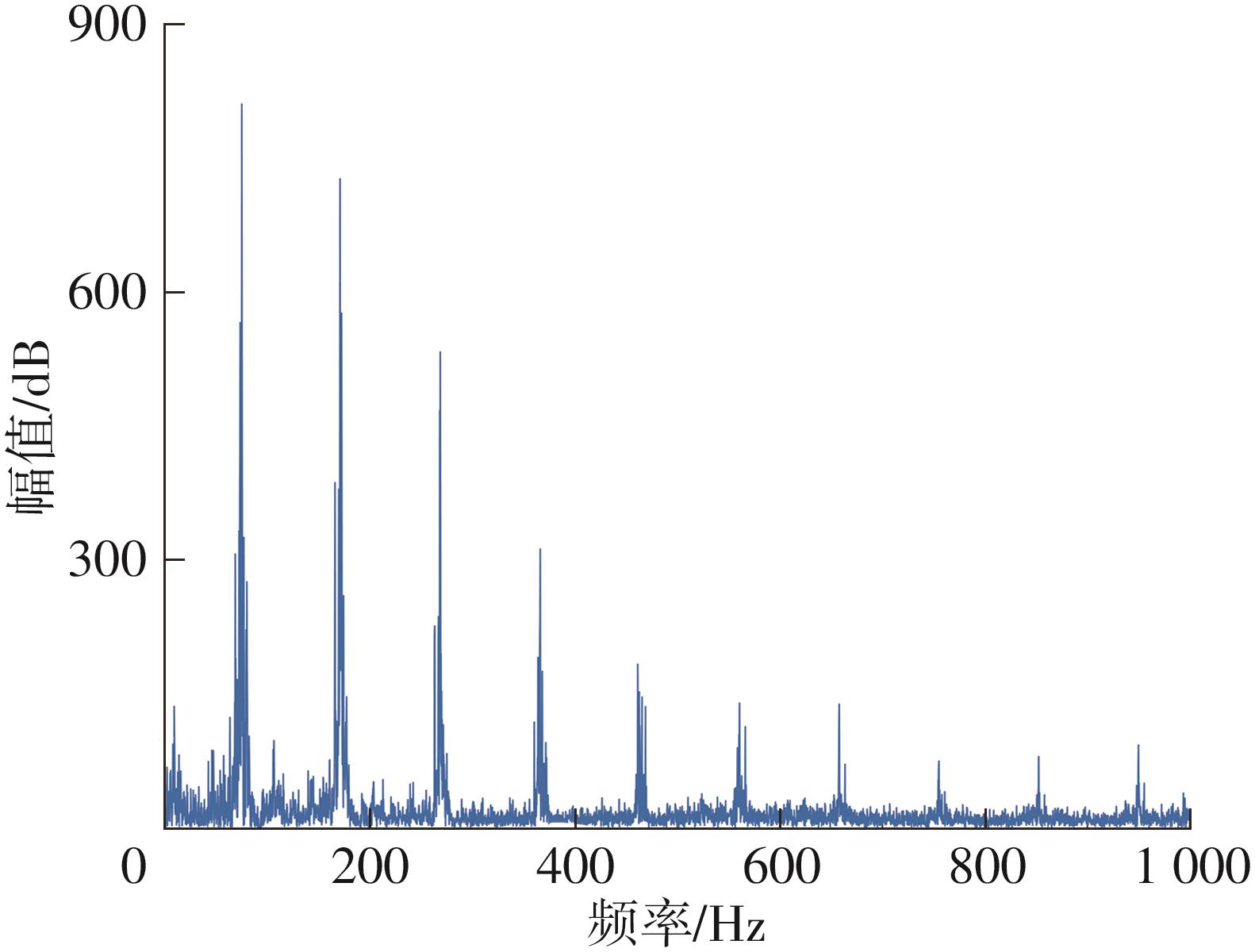

Fig.3
Schematic diagram of two sound source propagation models"
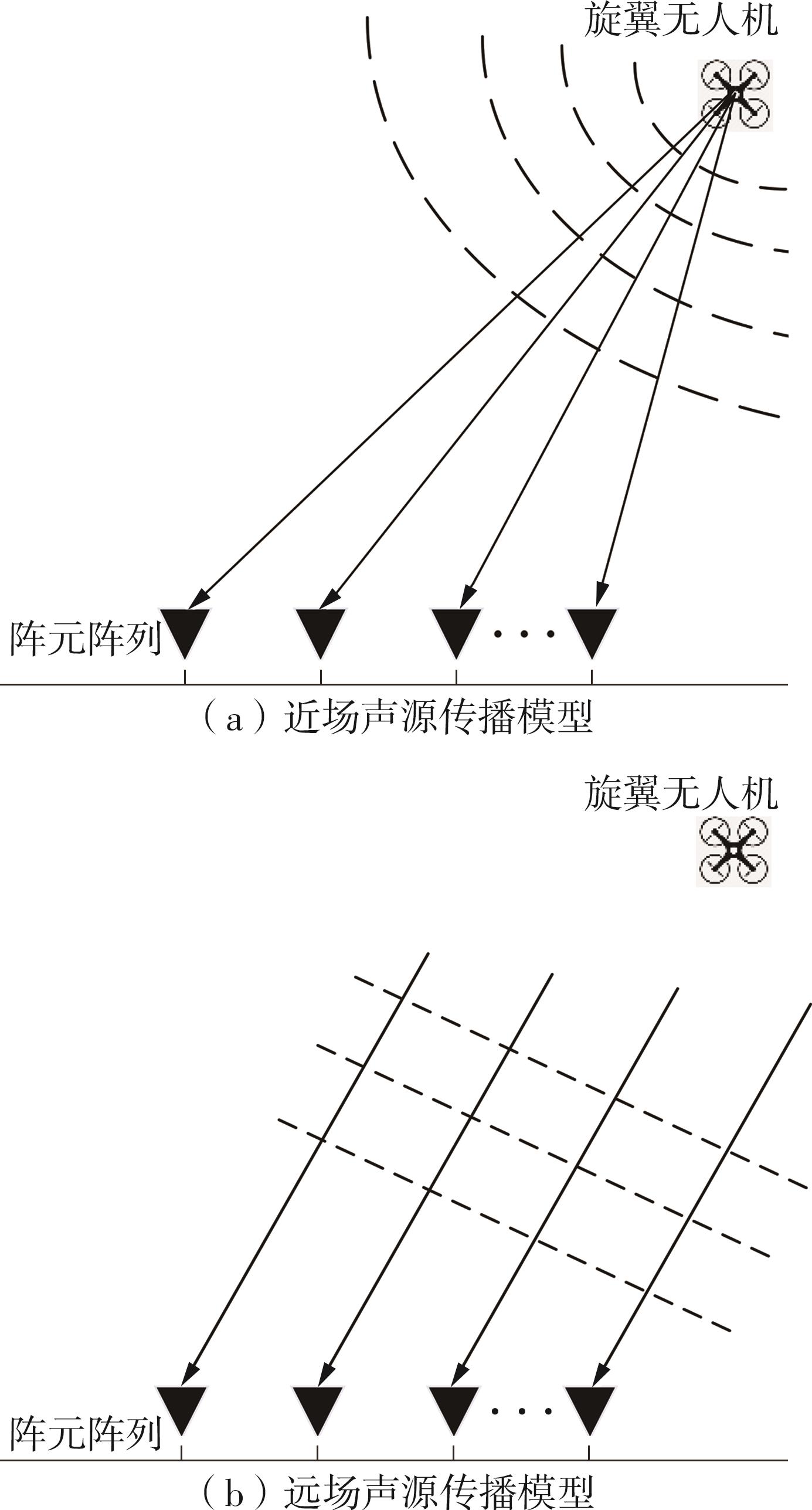
Table 1
Weighting function expression and characteristics"
| 函数名称 | 函数表达式 | 函数特性 |
|---|---|---|
| CC | w(ω)=1 | 当噪声相关时,基本互相关误差大 |
| PHAT | w(ω)= | 抑制干扰噪声,锐化峰值,当信号能量较小时,误差较大 |
| ROTH | w(ω)= | 对噪声功率大的频带抑制明显,但会展宽互相关函数峰值,误差较大 |
| SCOT | w(ω)= | 与ROTH相比,SCOT加权同时考虑了两个通道的影响,当周围环境噪声相关性强时,等价于ROTH |
| HB | w(ω)= | 对信号中周期成分有抑制作用,低信噪比下与基本互相关函数效果接近 |
| ML | 动态权值能较好地抑制干扰噪声,时延估计误差较小,但受制于噪声的先验知识 |

Fig.4
Angle estimation results of cross-correlation algorithm"

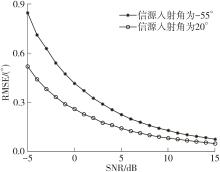
Fig.5
MUSIC root mean square error curves"
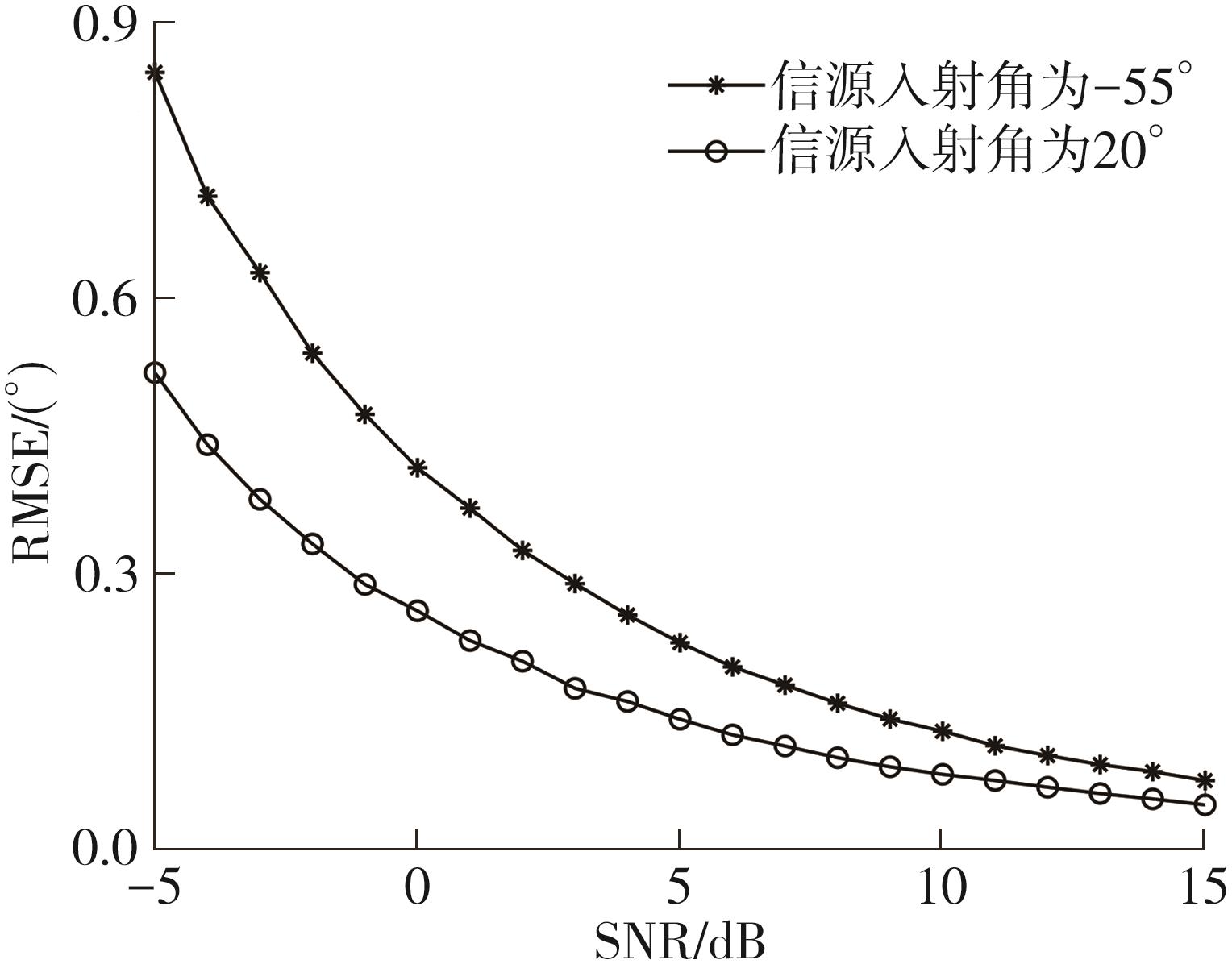

Fig.6
Root mean square errors of LS-ESPRIT and TLS-ESPRIT under different SNRs"
Fig.7
Frequency domain DOA estimation results"

Table 2
Existing UAV acoustic detection schemes"
| 文献序号 | 阵元数 | 阵列形式 | 定位方法 | 试验场地 | 最远探测距离/m |
|---|---|---|---|---|---|
| 4 | 矩形平面阵 | TDOA | 空旷校园 | 90 | |
| 9 | 十字阵 | TDOA | 空旷校园 | ||
| 3 | “L”型阵列 | TDOA | 空旷校园 | 100 | |
| 12 | 体积阵 | 波束形成 | 空旷户外 | 294 | |
| 8 | 双四面体 | TDOA | 空旷校园 | 110 | |
| 24 | “六臂”平面阵 | 波数形成 | 空旷户外 | 200 | |
| 12 | 体积阵 | 波束形成 | 空旷户外 | 260 | |
| 30 | 螺旋形体积阵 | 机器学习 | 空旷户外 | 380 | |
| 4 | 平面阵 | TDOA | 城市环境 | 100 | |
| 5 | 线列阵 | MUSIC | 空旷校园 | 50 | |
| 9 | 正交阵列 | 波束形成 | 空旷校园 | 80 |
| 1 | 张静,张科,王靖宇,等 .低空反无人机技术现状与发展趋势 [J].航空工程进展,2018,9(1):1-8,34. |
| ZHANG Jing, ZHANG Ke, WANG Jingyu,et al .A survey on anti-UAV technology and its future trend [J].Advances in Aeronautical Science and Engineering,2018,9(1):1-8,34. | |
| 2 | 吴浩,徐婧,李刚 .无人机探测与反制技术发展现状及建议 [J].飞航导弹,2020(9):89-95. |
| WU Hao, XU Jing, LI Gang .Development status and suggestions of UAV detection and countermeasure technology [J].Aerodynamic Missile Journal,2020(9):89-95. | |
| 3 | 罗俊海,王芝燕 .无人机探测与对抗技术发展及应用综述 [J].控制与决策,2022,37(3):530-544. |
| LUO Junhai, WANG Zhiyan .A review of development and application of UAV detection and counter technology [J].Control and Decision,2022,37(3):530-544. | |
| 4 | 何昌见,凌建寿,石凌飞 .无人机探测与反制技术现状及发展 [J].警察技术,2019(3):4-7. |
| HE Changjian, LING Jianshou, SHI Lingfei .Current situation and development of UAV detection and counter technology [J].Police Technology,2019(3):4-7. | |
| 5 | 吴聪,李海飞,王红,等 .PD雷达探测低慢小目标性能分析 [J].科学技术与工程,2013,13(28):8492-8496,8519. |
| WU Cong, LI Hai-fei, WANG Hong,et al .Influence of analysis of PD radar detecting LSS-targets [J].Science Technology and Engineering,2013,13(28):8492-8496,8519. | |
| 6 | 戚春,张聃,蔡云泽 .基于交互式多模型的红外/雷达低小慢目标跟踪算法研究 [J].上海航天,2012,29(6):37-41. |
| QI Chun, ZHANG Dan, CAI Yun-ze .Algorithms for low altitude target tracking based on interacting multiple model of dual-mode infrared/radar [J].Aerospace Shanghai,2012,29(6):37-41. | |
| 7 | AZARI M M, SALLOUHA H, CHIUMENTO A,et al .Key technologies and system trade-offs for detection and localization of amateur drones [J].IEEE Communications Magazine,2018,56(1):51-57. |
| 8 | 周同,郭俊幸,余振滔 .一种基于图像探测的无人机识别方法:CN111652067A [P].2020-09-11. |
| 9 | GANTI S R, KIM Y .Implementation of detection and tracking mechanism for small UAS [C]∥ Proceedings of 2016 International Conference on Unmanned Aircraft Systems.Arlington:IEEE,2016:1254-1260. |
| 10 | 何绍溟,李若萱,陶宏,等 .一种基于雷达和光电探测系统的反低慢小无人机方法:CN113138381A [P].2021-07-20. |
| 11 | OMOLOGO M, SVAIZER P .Acoustic source location in noisy and reverberant environment using CSP analysis [C]∥ Proceedings of 1996 IEEE International Confe-rence on Acoustics,Speech,and Signal Processing.Atlanta:IEEE,1996:921-924. |
| 12 | DING Guoru, WU Qihui, ZHANG Linyuan,et al .An amateur drone surveillance system based on the cognitive internet of things [J].IEEE Communications Magazine,2018,56(1):29-35. |
| 13 | UDDIN Z, NEBHEN J, ALTAF M,et al .Independent vector analysis inspired amateur drone detection through acoustic signals [J].IEEE Access,2021,9:63456- 63462. |
| 14 | SHI Zhiguo, CHANG Xianyu, YANG Chaoqun,et al .An acoustic-based surveillance system for amateur drones detection and localization [J].IEEE Transactions on Vehicular Technology,2020,69(3):2731-2739. |
| 15 | MEZEI J, MOLNAR A .Drone sound detection by correlation [C]∥ Proceedings of IEEE the 11th International Symposium on Applied Computational Intelligence and Informatics.Timisoara:IEEE,2016:509-517. |
| 16 | ANWAR M Z, KALEEM Z, JAMALIPOUR A .Machine learning inspired sound-based amateur drone detection for public safety applications [J].IEEE Transactions on Vehicular Technology,2019,68(3):2526-2534. |
| 17 | 王威,安腾飞,欧建平 .无人机被动音频探测和识别技术研究 [J].声学技术,2018,37(1):89-93. |
| WANG Wei, AN Teng-fei, Jian-ping OU .Research on audio detection and recognition of UAV technology [J].Technical Acoustics,2018,37(1):89-93. | |
| 18 | COX H, ZESKIND R, OWEN M M .Robust adaptive beamforming [J].IEEE Transactions on Acoustics,Speech,and Signal Processing,1987,35(10):1365- 1376. |
| 19 | 陈鹏 .基于协方差矩阵重构的稳健自适应波束形成方法研究 [D].西安:西北工业大学,2019. |
| 20 | CAPON J .High-resolution frequency-wave number spectrum analysis [J].Proceedings of the IEEE,1969,57(8):1408-1418. |
| 21 | CARLSON B .Covariance matrix estimation errors and diagonal loading in adaptive arrays [J].IEEE Tran-sactions on Aerospace and Electronic Systems,1988,24(4):397-401. |
| 22 | CHANG L, YEH C C .Performance of DMI and eigenspace-based beamformers [J].IEEE Transactions on Antennas and Propagation,1992,40(11):1336-1347. |
| 23 | GERSHMAN A B, NICKEL U, BOHME J F .Adaptive beamforming algorithms with robustness against jammer motion [J].IEEE Transactions on Signal Processing,1997,45(7):1878-1885. |
| 24 | 邵元,杨超,郭辉 .近场相干声源三维定位MUSIC算法 [J].计算机与数字工程,2021,49(5):1013-1017. |
| SHAO Yuan, YANG Chao, GUO Hui .Three-dimensional localization algorithm of near-field coherent sound source based on rectangular microphone array [J].Computer and Digital Engineering,2021,49(5):1013-1017. | |
| 25 | 殷作亮 .基于麦克风阵列的MUSIC声源定位算法研究 [D].哈尔滨:哈尔滨工业大学,2008. |
| 26 | SCHMIDT R .Multiple emitter location and signal para-meter estimation [J].IEEE Transactions on Antennas and Propagation,1986,34(3):276-280. |
| 27 | PAULRAJ A, ROY R, KAILATH T .A subspace rotation approach to signal parameter estimation [J].Proceedings of the IEEE,1986,74(7):1044-1046. |
| 28 | RAO B D, HARI K .Performance analysis of root-MUSIC [C]∥ Proceedings of the Twenty-Second Asilomar Conference on Signals,Systems and Computers.Pacific Grove:IEEE,1988:578-582. |
| 29 | VIBERG M, OTTERSTEN B .Sensor array processing based on subspace fitting [J].IEEE Transactions on Signal Processing,1991,39(5):1110-1121. |
| 30 | KUNDU D .Modified MUSIC algorithm for estimating DOA of signals [J].Signal Processing,1996,48(1):85-90. |
| 31 | ZHANG Xiaofei, LV Wen, SHI Ying,et al .A novel DOA estimation algorithm based on eigen space [C]∥ Proceedings of 2007 International Symposium on Microwave,Antenna,Propagation and EMC Technologies for Wireless Communications.Hangzhou:IEEE,2007:551-554. |
| 32 | ROY R, PAULRAJ A, KAILATH T .Estimation of signal parameters via rotational invariance techniques:ESPRIT [C]∥ Proceedings of 1986 IEEE Military Communications Conference:Communications-Computers:Teamed for the 90’s.Monterey:IEEE,1986:41.6.1-41.6.5. |
| 33 | WANG Bu-hong, WANG Yong-liang, CHEN Hui .Weighted spatial smoothing for direction-of-arrival estimation of coherent signals [C]∥ Proceedings of IEEE Antennas and Propagation Society International Symposium.San Antonio:IEEE,2002:668-671. |
| 34 | 邓艳容,李嘉栋,张法碧,等 .基于远场声源定位的改进MUSIC算法研究 [J].电子技术应用,2018,44(12):69-72. |
| DENG Yanrong, LI Jiadong, ZHANG Fabi,et al .Research on improved MUSIC algorithm based on far field sound source localization [J].Application of Electronic Technology,2018,44(12):69-72. | |
| 35 | 李蜀丰,徐永绍,刘秉政,等 .基于改进MUSIC的声源定位方法 [J].电子测量与仪器学报,2021,35(8):212-219. |
| LI Shufeng, XU Yongshao, LIU Bingzheng,et al .Sound source localization method based on improved MUSIC [J].Journal of Electronic Measurement and Instrumentation,2021,35(8):212-219. | |
| 36 | 唐浩洋,陈子为,黄维 .基于麦克风阵列的GCC时延估计算法分析 [J].计算机系统应用,2019,28(12):140-145. |
| TANG Hao-yang, CHEN Zi-wei, HUANG Wei .Analysis of GCC time delay estimation algorithm based on microphone array [J].Computer Systems and Applications,2019,28(12):140-145. | |
| 37 | KNAPP C, CARTER G .The generalized correlation method for estimation of time delay [J].IEEE Tran-sactions on Acoustics,Speech,and Signal Processing,1976,24(4):320-327. |
| 38 | 王震 .基于互功率谱相位时延估计的声源定位系统研究 [D].天津:天津大学,2010. |
| 39 | 行鸿彦,唐娟 .时延估计方法的分析 [J].声学技术,2008,27(1):110-114. |
| XING Hong-yan, TANG Juan .Analysis and survey of algorithms for time-delay estimation [J].Technical Acoustics,2008,27(1):110-114. | |
| 40 | QUAZI A H .An overview on the time delay estimate in active and passive systems for target localization [J].IEEE Transactions on Acoustics,Speech,and Signal Processing,1981,29(3):527-533. |
| 41 | 景思源,冯西安,张亚辉 .广义互相关时延估计声定位算法研究 [J].声学技术,2014,33(5):464-468. |
| JING Siyuan, FENG Xian, ZHANG Yahui .Research on generalized cross-correlation delay estimation sound localization algorithm [J].Acoustics Technology,2014,33(5):464-468. | |
| 42 | YOUN D, AHMED N, CARTER G .On using the LMS algorithm for time delay estimation [J].IEEE Tran-sactions on Acoustics,Speech,and Signal Processing,1982,30(5):798-801. |
| 43 | 唐娟,行鸿彦 .基于二次相关的时延估计方法 [J].计算机工程,2007,33(21):265-267. |
| TANG Juan, XING Hong-yan .Time delay estimation based on second correlation [J].Computer Enginee-ring,2007,33(21):265-267. | |
| 44 | 窦慧晶,王千龙,张雪 .基于二次相关的广义互相关时差估计算法 [J].北京工业大学学报,2016,42(2):197-202. |
| DOU Huijing, WANG Qianlong, ZHANG Xue .Genera-lized cross-correlation algorithm based on second correlation [J].Journal of Beijing University of Technology,2016,42(2):197-202. | |
| 45 | 周康辉,董万胜,刘恒毅,等 .利用二次相关改进的广义互相关时延估计算法 [J].数据采集与处理,2013,28(6):801-806. |
| ZHOU Kanghui, DONG Wansheng, LIU Hengyi,et al .Improved generalized cross correlation method for time delay estimation by using second correlation [J].Journal of Data Acquisition and Processing,2013,28(6):801-806. | |
| 46 | 王秀芳,张光华,陈雪松 .消除数字滤波器中Gibbs现象的研究 [J].信号处理,2003,19():13-16. |
| WANG Xiufang, ZHANG Guanghua, CHEN Xuesong .A study of eliminating Gibbs phenomenon in digital filter [J].Signal Processing,2003,19():13-16. | |
| 47 | 马金铭,苗红霞,苏新华,等 .分数傅里叶变换理论及其应用研究进展 [J].光电工程,2018,45(6):170747/1-24. |
| MA Jinming, MIAO Hongxia, SU Xinhua,et al .Research progress in theories and applications of the fractional Fourier transform [J].Opto-Electronic Engineering,2018,45(6):170747/1-24. | |
| 48 | 夏天,吴春玉,张勇 .基于多旋翼无人机噪声分析的维修性探究 [J].中国新通信,2019,21(17):239. |
| XIA Tian, WU Chunyu, ZHANG Yong .Research on maintainability based on noise analysis of multi-rotor UAV [J].China New Telecommunications,2019,21(17):239. | |
| 49 | 蔺诚毅,吴亚锋,陈耿 .无人机螺桨噪声主动控制实验 [J].科学技术与工程,2014,14(9):265-268. |
| LIN Cheng-yi, WU Ya-feng, CHEN Geng .Active noise control experiment for unmanned aerial vehicle propeller [J].Science Technology and Engineering,2014,14(9):265-268. | |
| 50 | 李鹏 .飞机螺旋桨噪声及降噪分析 [J].装备制造技术,2009(8):37-38. |
| LI Peng .The analysis of aircraft propeller noise and decreasing [J].Equipment Manufacturing Technology,2009(8):37-38. | |
| 51 | 程翠 .基于声纹多谐波分析的无人机检测与定位研究 [D].杭州:浙江大学,2018. |
| 52 | YAKUBOVSKIY A, SALLOUM H, SUTIN A,et al .Feature extraction for acoustic classification of small aircraft [C]∥ Proceedings of 2015 IEEE Workshop on Applications of Signal Processing to Audio and Acoustics.New Paltz:IEEE,2015:1-5. |
| 53 | GUANING S, MORF M .The signal subspace approach for multiple wide-band emitter location [J].IEEE Transactions on Acoustics,Speech,and Signal Processing,1983,31(6):1502-1522. |
| 54 | WAX M, SHAN T J, KAILATH T .Spatio-temporal spectral analysis by eigen structure methods [J].IEEE Transactions on Acoustics,Speech,and Signal Processing,1984,32(4):817-827. |
| 55 | ARGENTIERI S, DANES P .Broadband variations of the MUSIC high-resolution method for sound source loca-lization in robotics [C]∥ Proceedings of 2007 IEEE/ RSJ International Conference on Intelligent Robots and Systems.San Diego:IEEE,2007:2009-2014. |
| 56 | 申一伟 .基于宽带阵列参数估计的数字波束形成研究 [D].西安:西安电子科技大学,2017. |
| 57 | 居太亮 .基于麦克风阵列的声源定位算法研究 [D].成都:电子科技大学,2006. |
| 58 | IZYDORCZYK J .Time delay estimation using the LMS adaptive filter [J].IFAC Proceedings Volumes,2006,39(21):298-303. |
| 59 | WIENER N .Generalized harmonic analysis [J].Acta Mathematica,1930,55(1):117-258. |
| 60 | REED I S, MALLETT J D, BRENNAN L E .Rapid convergence rate in adaptive arrays [J].IEEE Transactions on Aerospace and Electronic Systems,1974,10(6):853-863. |
| 61 | 刘艳,杨力生,黄卫华 .ESPRIT算法估计性能分析 [J].信息技术,2011(3):100-102,106. |
| LIU Yan, YANG Li-sheng, HUANG Wei-hua .Analysis for the performance of ESPRIT algorithm[J].Information Technology,2011(3):100-102,106. | |
| 62 | 黄宇,柏正尧,黄振,等 .采用小波分析和TLS-ESPRIT的DOA估计算法 [J].计算机仿真,2015,32(5):209-212. |
| HUANG Yu, BAI Zheng-yao, HUANG Zhen,et al .Joint DOA estimation algorithm using wavelet analysis and TLS-ESPRIT [J].Computer Simulation,2015,32(5):209- 212. | |
| 63 | 潘祺凰 .基于小型麦克风阵列的低空无人飞行器探测系统研究 [D].南京:南京理工大学,2017. |
| 64 | 黄强 .低空无人机被动声探测定位方法研究 [D].成都:电子科技大学,2018. |
| 65 | 冯仕轩 .基于麦克风阵列的无人机定位方法研究 [D].西安:西安电子科技大学,2019. |
| 66 | 王学猛 .微弱声源智能采集的无人机被动探测系统研究与实现 [D].成都:电子科技大学,2018. |
| 67 | SEDUNOV A, SALLOUM H, SUTIN A,et al .UAV passive acoustic detection [C]∥ Proceedings of 2018 IEEE International Symposium on Technologies for Homeland Security.Woburn:IEEE,2018:1-6. |
| 68 | 常先宇 .基于声阵列的无人机检测及定位系统 [D].杭州:浙江大学,2019. |
| 69 | 马春艺,张君,鲍明,等 .声场空频特征非参数融合无人机声学探测 [J].信号处理,2019,35(9):1590-1598. |
| MA Chunyi, ZHANG Jun, BAO Ming,et al .UAV acoustic detection based on non-parametric fusion of spatial-frequency characteristics of sound field [J].Journal of Signal Processing,2019,35(9):1590-1598. | |
| 70 | SEDUNOV A, HADDAD D, SALLOUM H,et al .Stevens drone detection acoustic system and experiments in acoustics UAV tracking [C]∥ Proceedings of 2019 IEEE International Symposium on Technologies for Homeland Security.Woburn:IEEE,2019:1-7. |
| 71 | DUMITRESCU C, MINEA M, COSTEA I M,et al .Development of an acoustic system for UAV detection [J].Sensors,2020,20(17):4870/1-27. |
| 72 | KARTASHOV V, OLEYNIKOV V, KORYTTSEV I,et al .Use of acoustic signature for detection,recognition and direction finding of small unmanned aerial vehicles [C]∥ Proceedings of IEEE the 15th International Confe-rence on Advanced Trends in Radioelectronics,Telecommunications and Computer Engineering.Lviv-Slavske:IEEE,2020:1-4. |
| 73 | 张坤 .基于嵌入式的麦克风阵列声源定位系统算法研究 [D].西安:西安工业大学,2018. |
| 74 | ZHANG Xianyu, YANG Chaoqun, SHI Xiufang,et al.Feature extracted DOA estimation algorithm using acoustic array for drone surveillance [C]∥ Proceedings of IEEE the 87th Vehicular Technology Conference.Porto:IEEE,2018:1-5. |
| 75 | BLANCHARD T, THOMAS J H, RAOOF K .Acoustic signature analysis for localization estimation of unmanned aerial vehicles using few number of microphones [C]∥ Proceedings of the 2nd Franco-Chinese Acoustic Confe-rence.Le Mans:EDP Sciences,2019:1-6. |
| 76 | 郭俊峰 .基于麦克风阵列的小型无人机侦测及定位方案设计 [D].重庆:重庆邮电大学,2018. |
| [1] | Wei De-min Xu Mu Li Di. Frequency Domain Analysis for Wind-Induced Vibration Response of Long-Span Cable Dome Structures [J]. Journal of South China University of Technology(Natural Science Edition), 2012, 40(4): 112-117. |
| [2] | Wei De-min Liu Ya-qing. Analyses of Wind-Induced Vibration Response of Suspended Dome Structures [J]. Journal of South China University of Technology(Natural Science Edition), 2012, 40(10): 90-95. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||