华南理工大学学报(自然科学版) ›› 2025, Vol. 53 ›› Issue (4): 102-112.doi: 10.12141/j.issn.1000-565X.240377
旋转共轴驱动永磁球型关节设计及扰动抑制
张永顺, 刘志军, 刘振虎, 王莉
- 大连理工大学 高性能精密制造全国重点实验室,辽宁 大连 116024
Design and Disturbance Suppression of a Permanent Magnet Flexible Spherical Wrist Driven by Rotating Magnetic Coaxial Effect
ZHANG Yongshun, LIU Zhijun, LIU Zhenhu, WANG Li
- State Key Laboratory of High-Performance Precision Manufacturing,Dalian University of Technology,Dalian 116024,Liaoning,China
摘要:
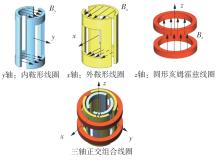
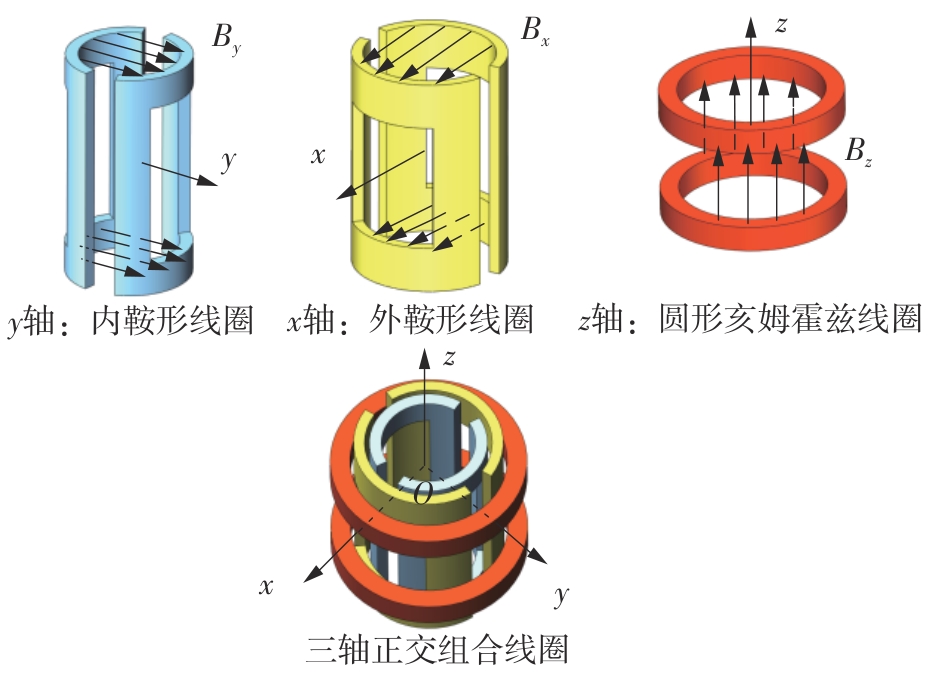
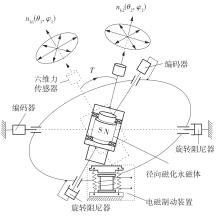
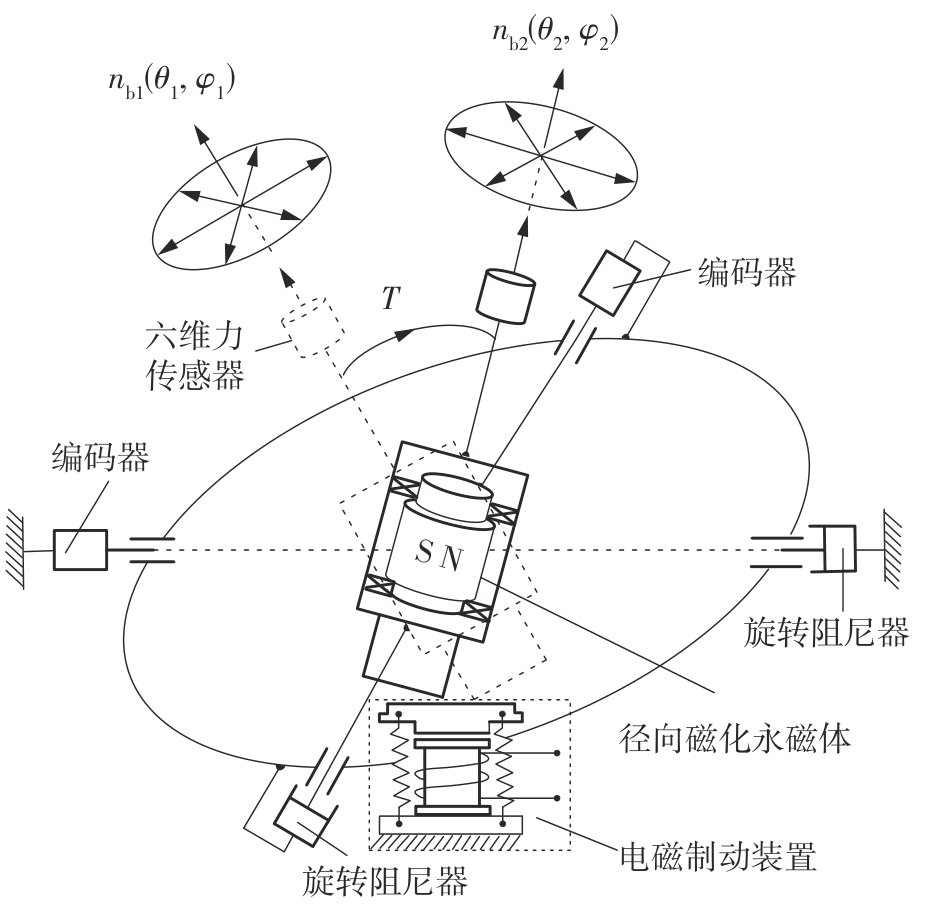
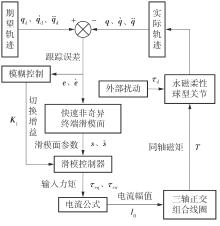
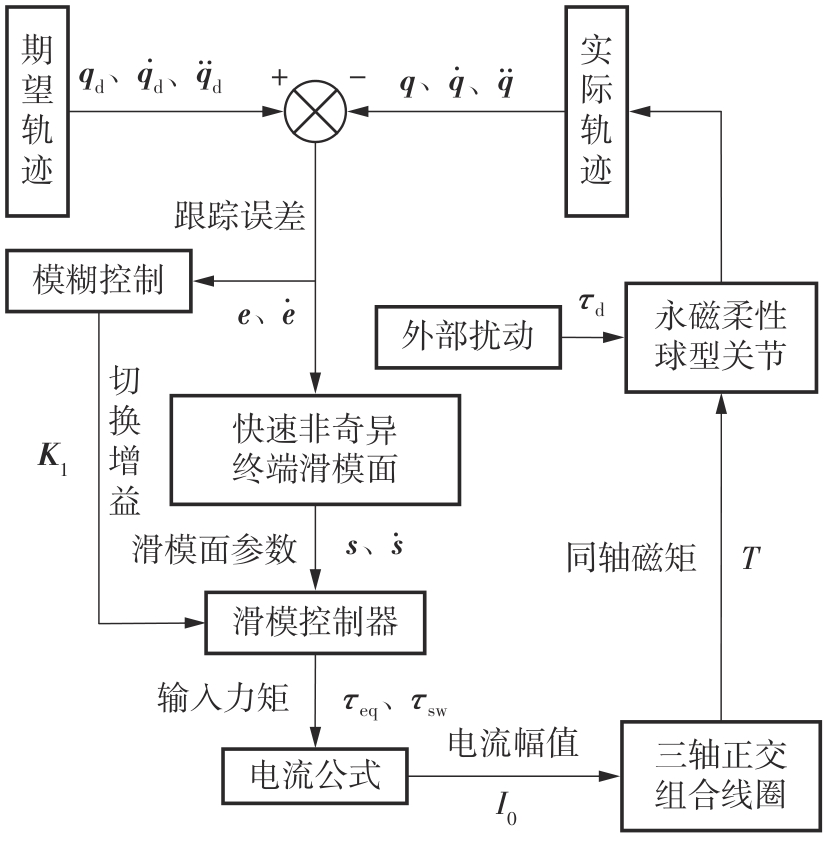
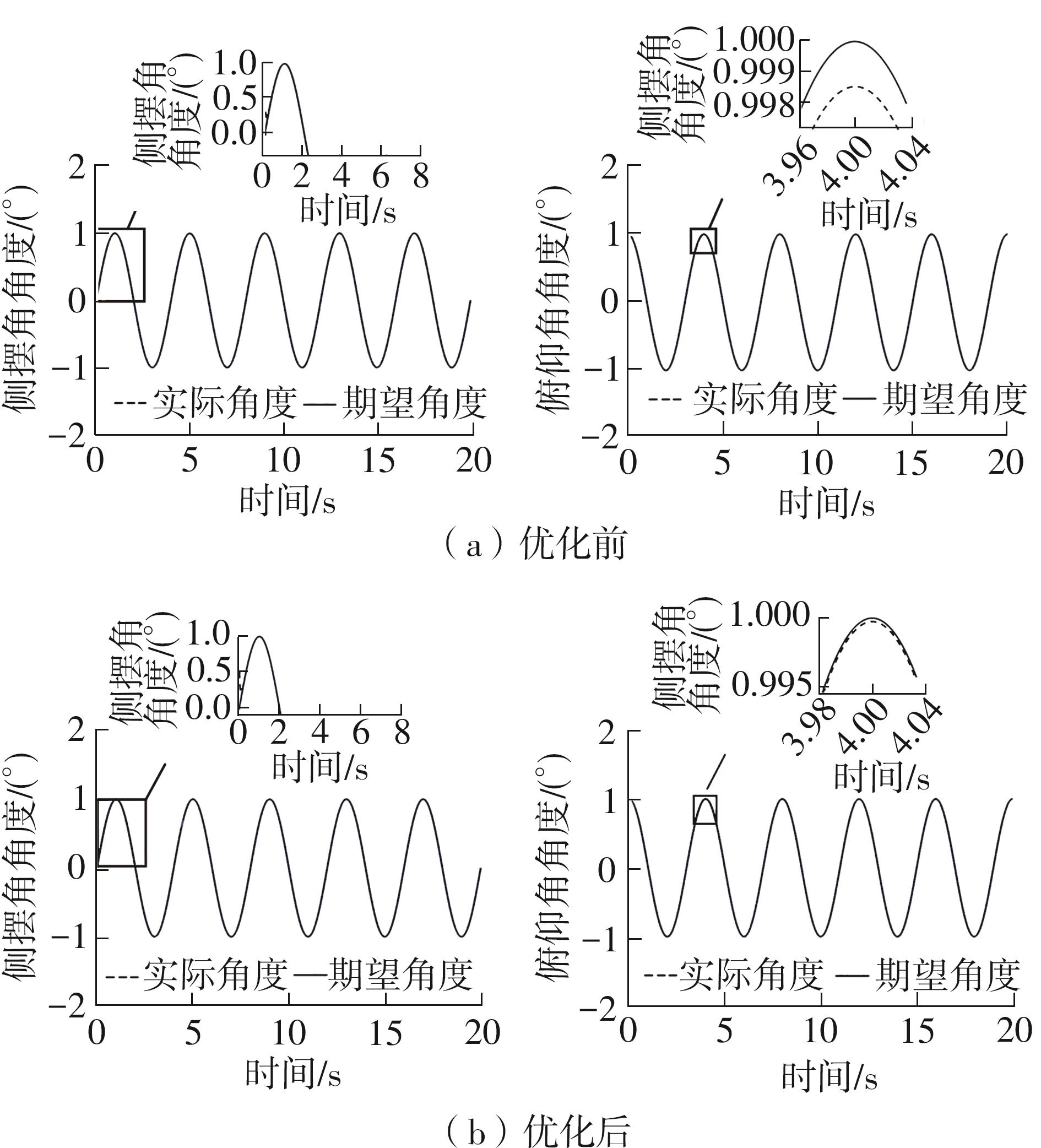
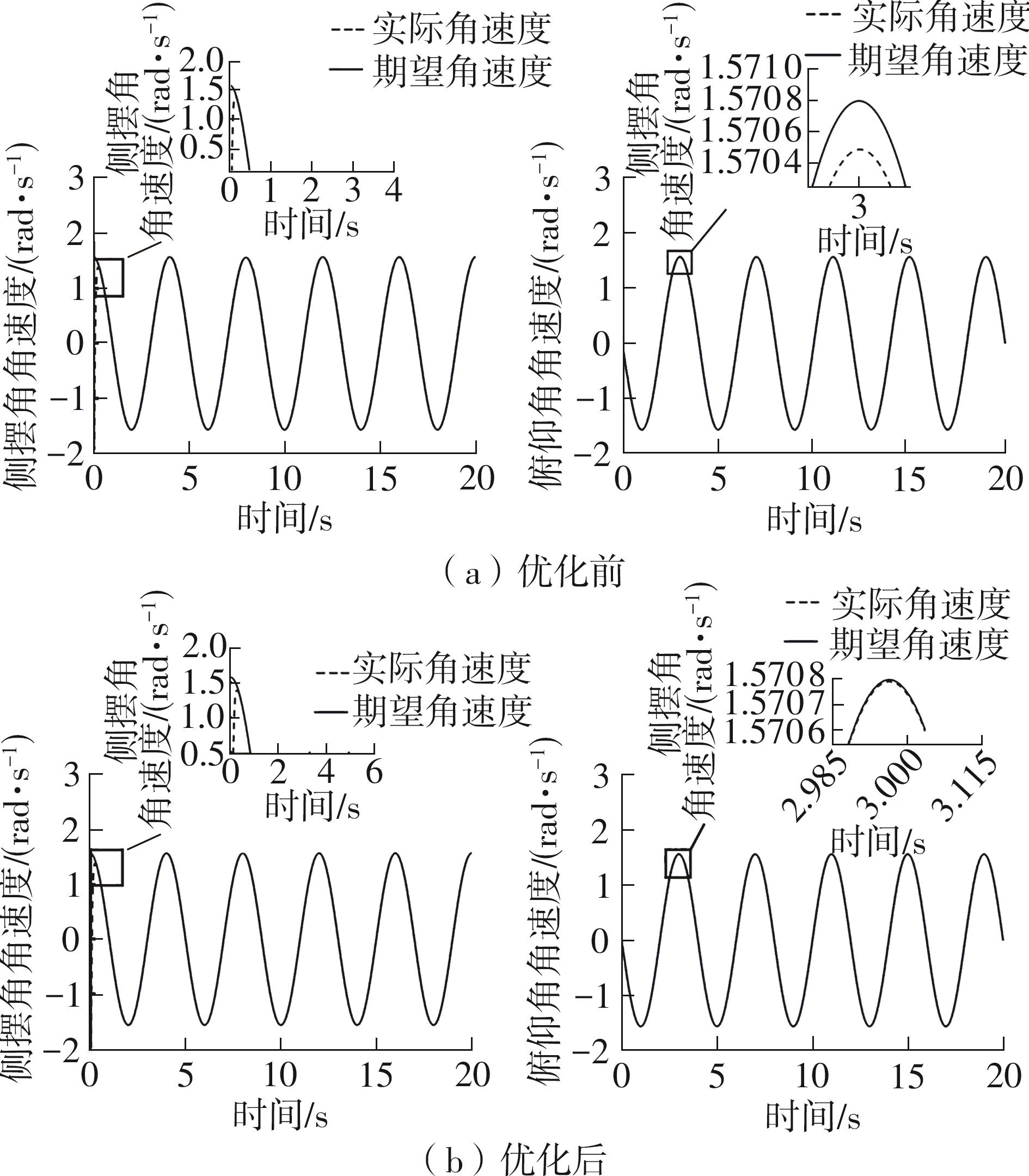
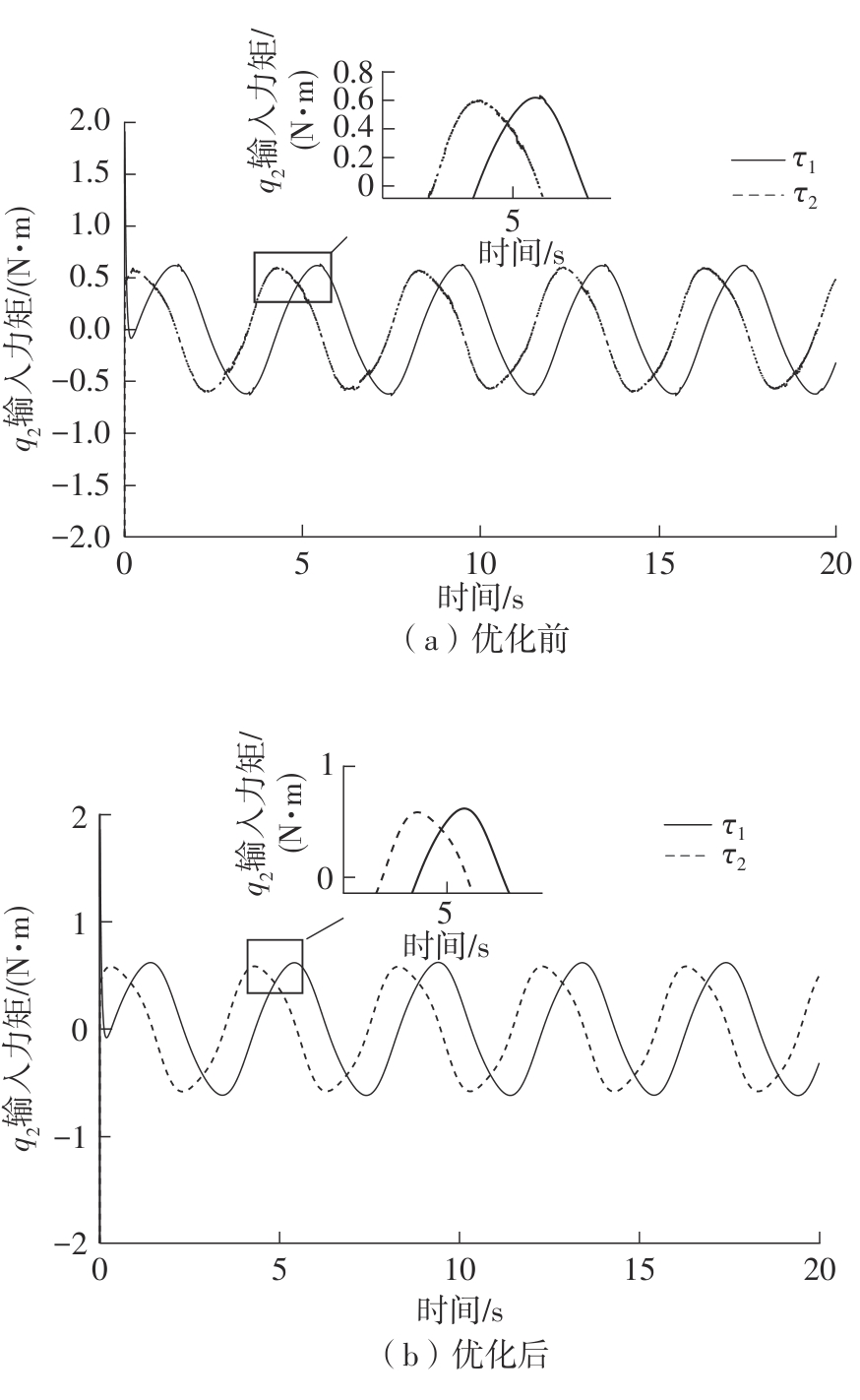
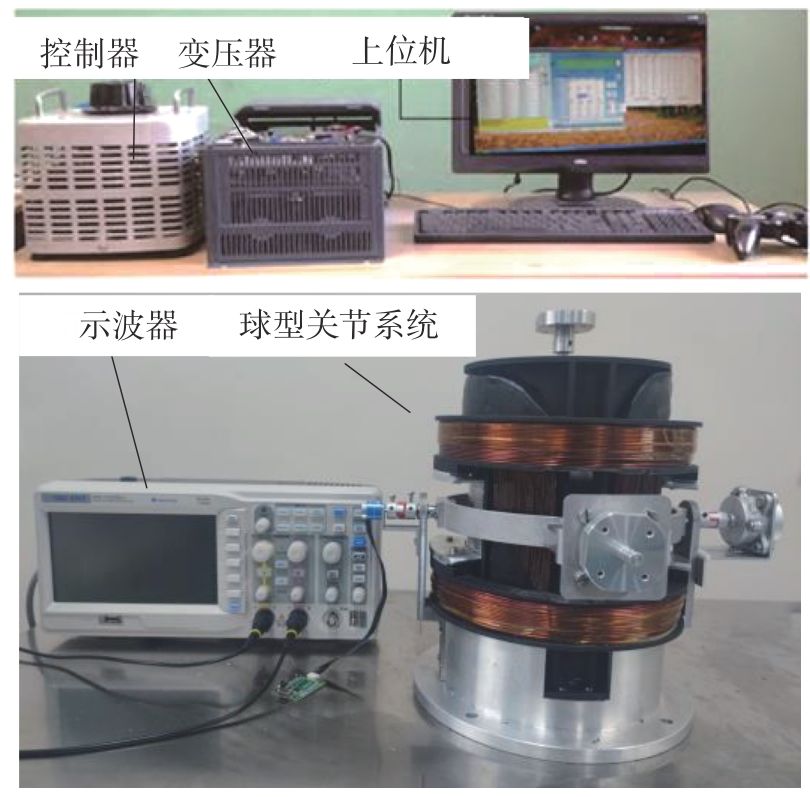
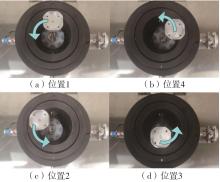
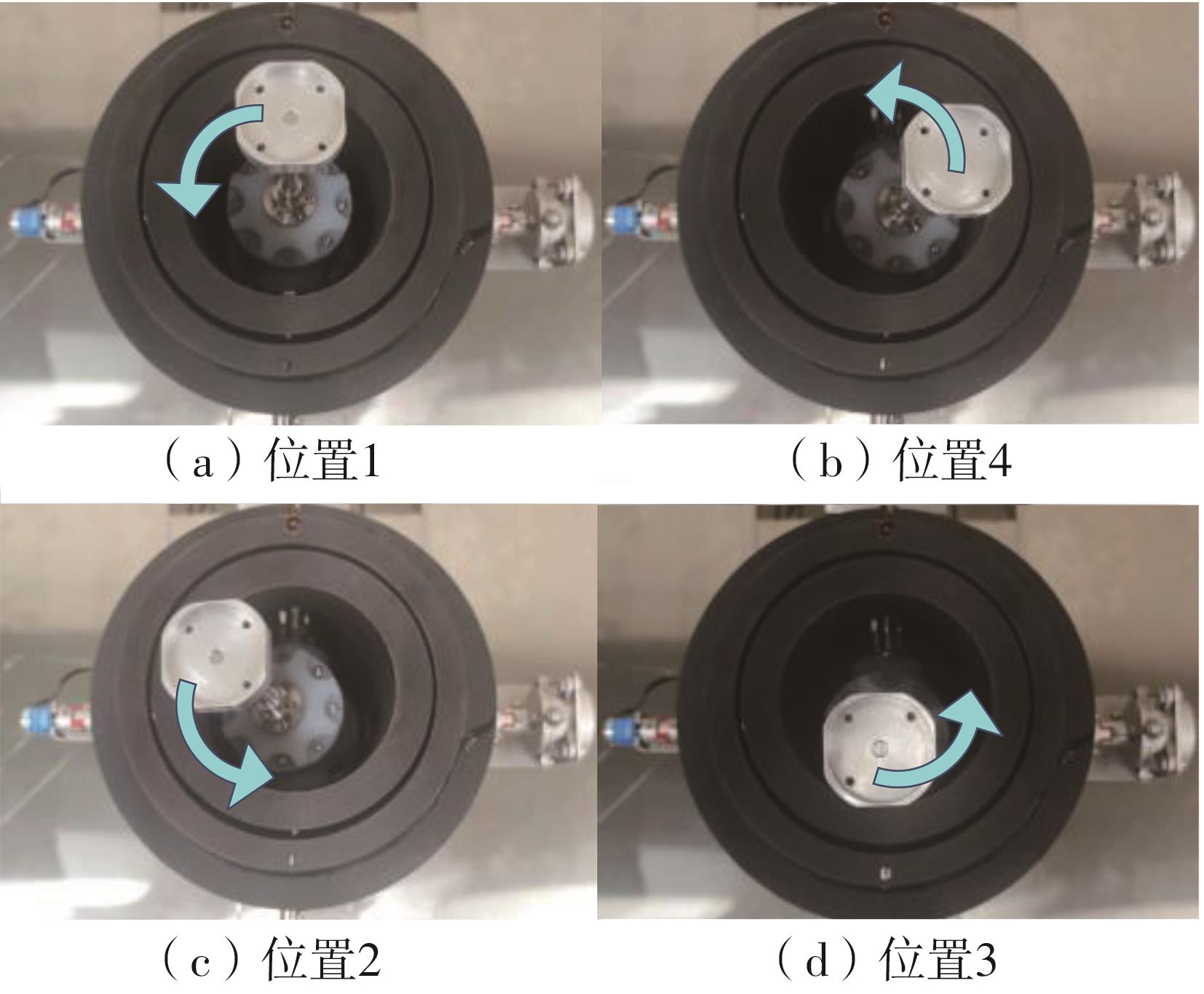
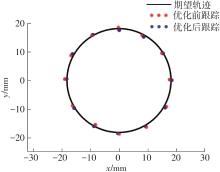
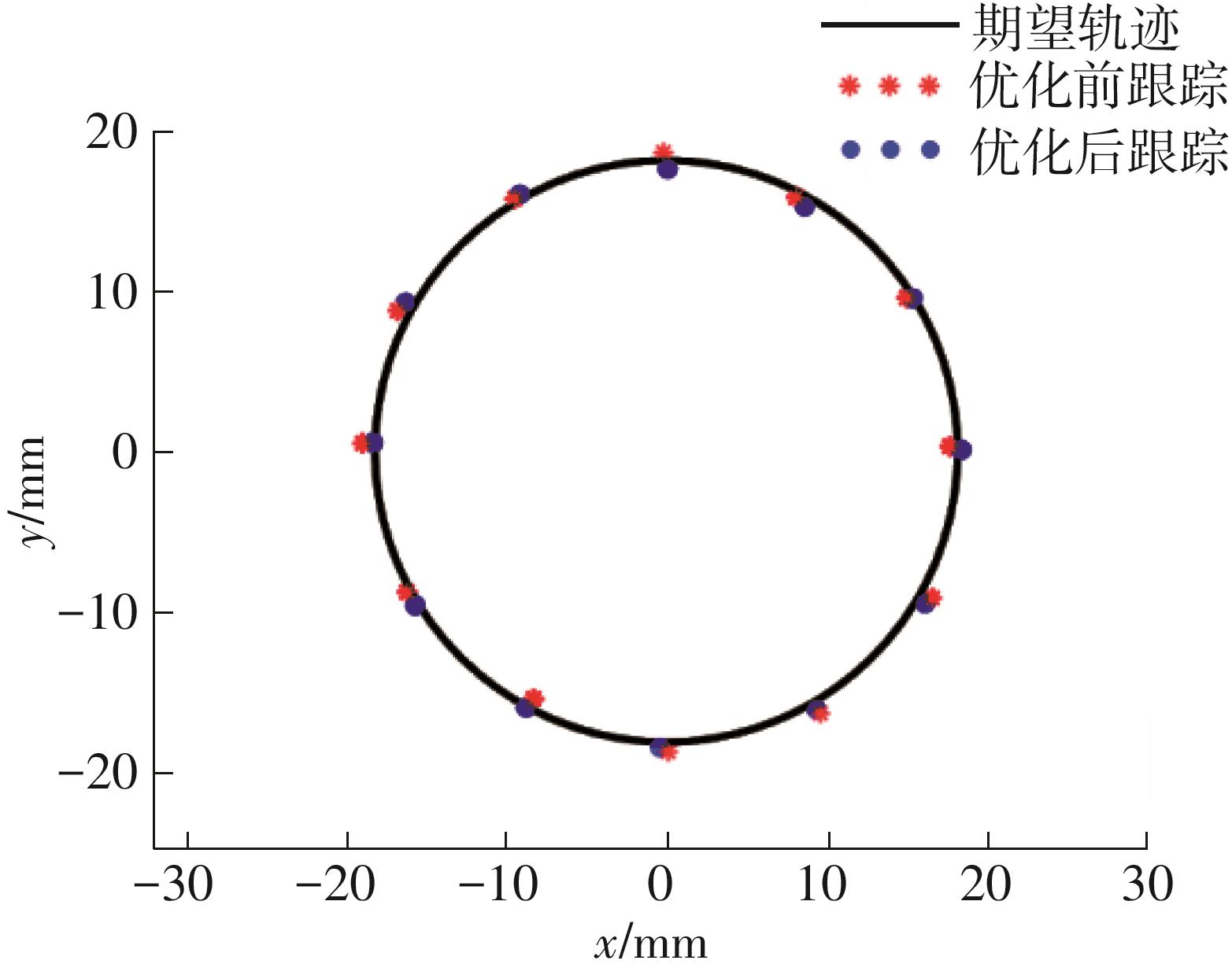
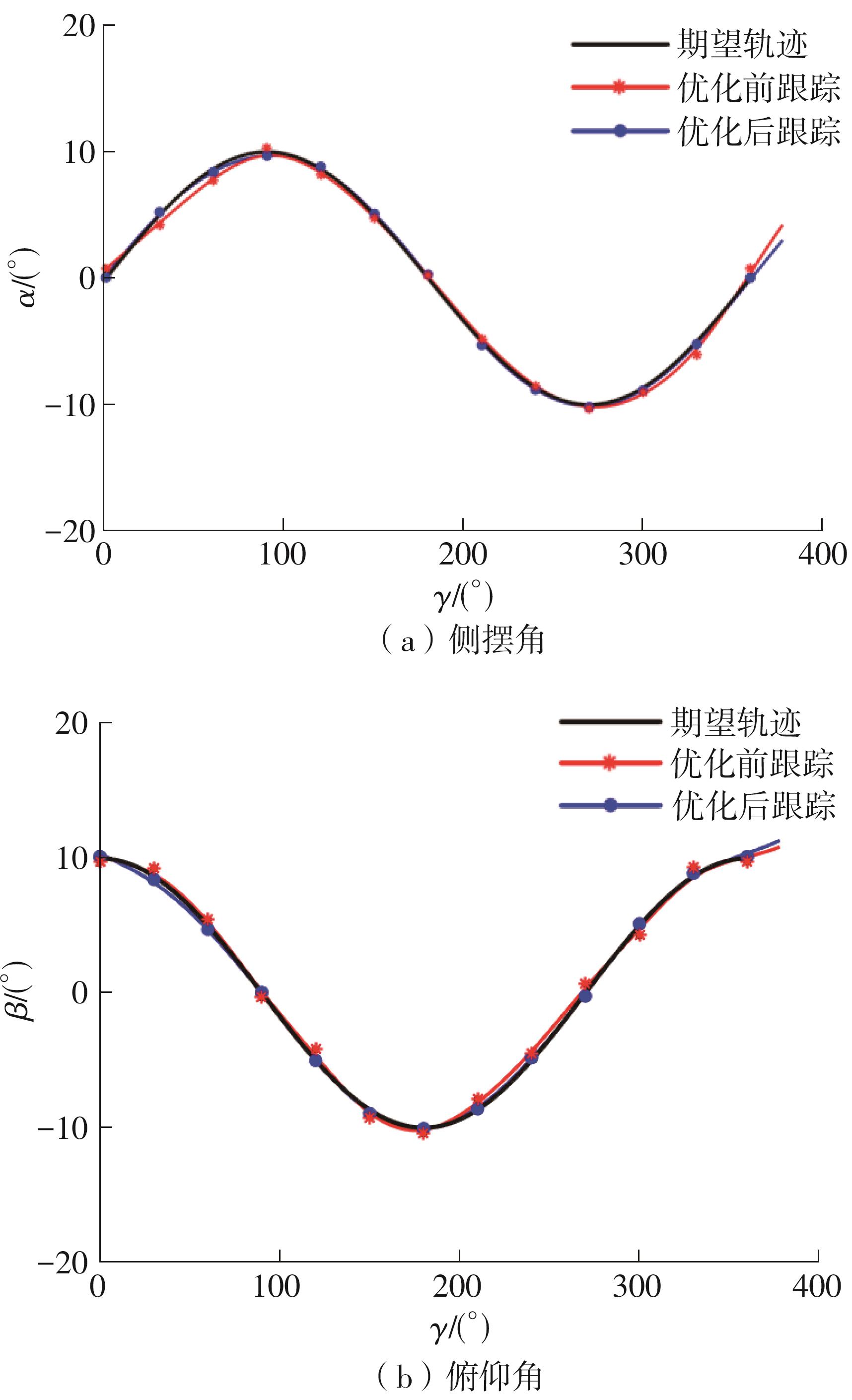
针对当前永磁球型关节普遍存在电磁驱动结构复杂,耦合磁场建模困难,磁矩奇异性,抵抗外界扰动能力不足等问题,依据永磁体转子轴线始终趋于磁场旋转轴线的旋转定轴效应,研制了一种以内置全悬浮永磁体转子的万向随动机构为主体的永磁柔性直驱球型关节。球型关节的定子由两组鞍形线圈和一组亥姆线圈三轴正交嵌套而成。为解决磁矩控制变量冗余问题,采用磁场旋转轴线侧摆、俯仰角为独立控制变量的三相电流公式叠加空间万向旋转磁场,实现磁场内同步旋转永磁体转子侧摆、俯仰磁矩解耦和在空间万向磁场旋转轴线导引下的永磁球型关节侧摆、俯仰两自由度运动。进而,用Lyapunov函数证明系统稳定性,采用基于模糊算法优化的非奇异快速终端滑模控制方法抑制抖振和降低输出端轨迹误差。模拟结果验证了模糊优化滑模控制器的有效性。相比未模糊优化滑模控制方法,存在外界扰动时,优化模糊控制器通过切换增益进行自适应调整,能有效抑制系统控制输入产生的抖振,并提高轨迹跟踪速度,降低跟踪误差。仿真和试验表明,球型关节电磁结构简单,磁场解析建模便利,电流输入变量与磁矩输出变量一一对应,抗干扰能力和抖振抑制效果良好,实现了球型关节期望轨迹的快速跟踪,动态跟踪性能良好,改善了复杂环境的适应性。
中图分类号: