华南理工大学学报(自然科学版) ›› 2022, Vol. 50 ›› Issue (10): 132-139.doi: 10.12141/j.issn.1000-565X.220164
所属专题: 2022年流体动力与机电控制工程
遥操作软体机械臂的末端力反馈系统分析
周俊杰1 张凌钰1 于洋2 张建1 马惠臣1
- 1.北京理工大学 机械与车辆学院,北京 100081
2.中国医学科学院 阜外医院,北京 100037
Research on Teleoperation and End Force Feedback System of Soft Actuator
ZHOU Junjie1 ZHANG Lingyu1 YU Yang2 ZHANG Jian1 MA Huichen1
- 1.School of Mechanical Engineering,Beijing Institute of Technology,Beijing 100081,China
2.Department of Anesthesiology,Fuwai Hospital,Chinese Academy of Medical Sciences & Peking Union Medical College,Beijing 100037,China
摘要:
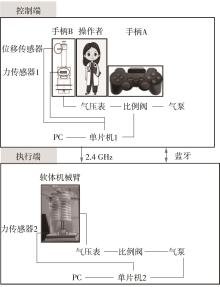
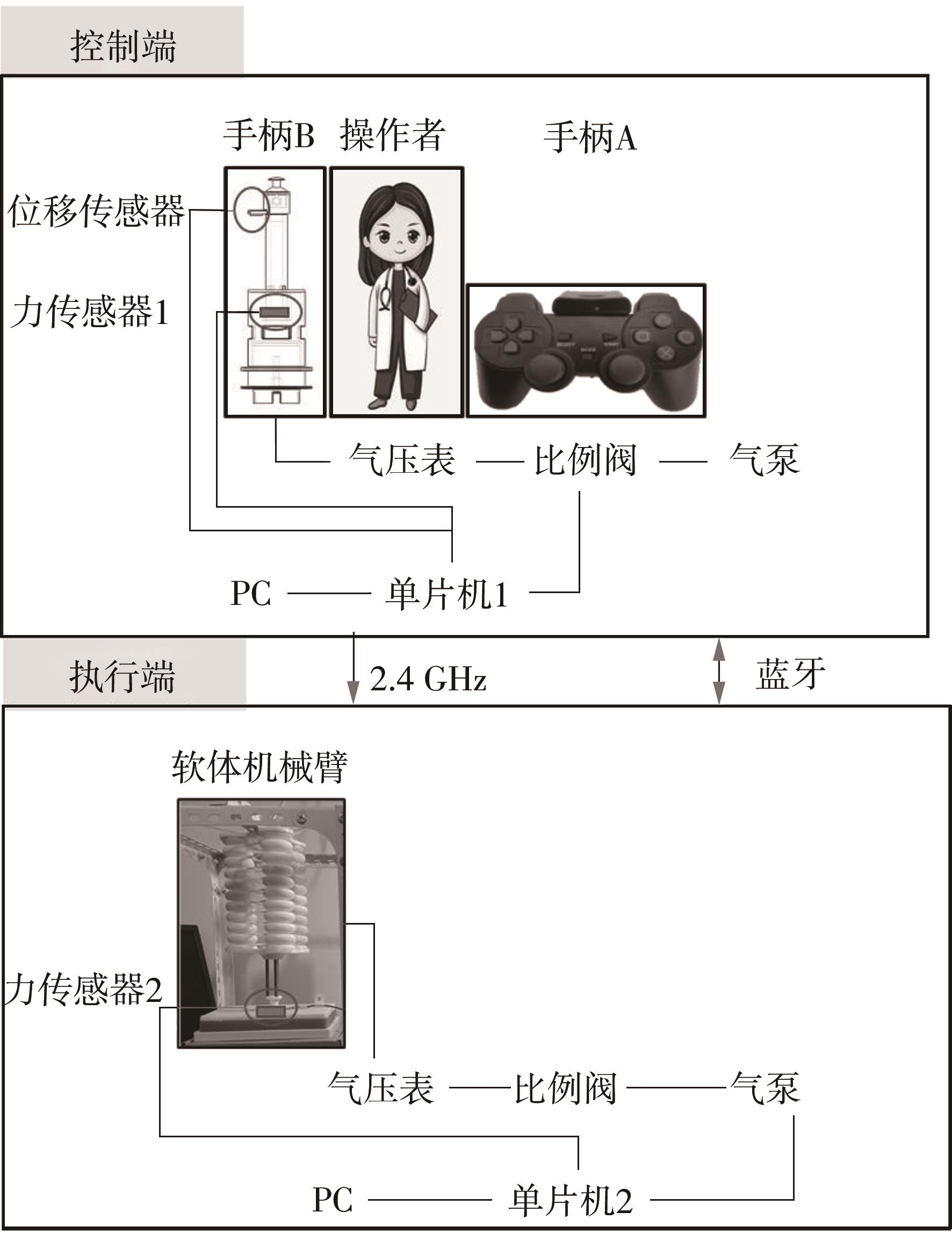
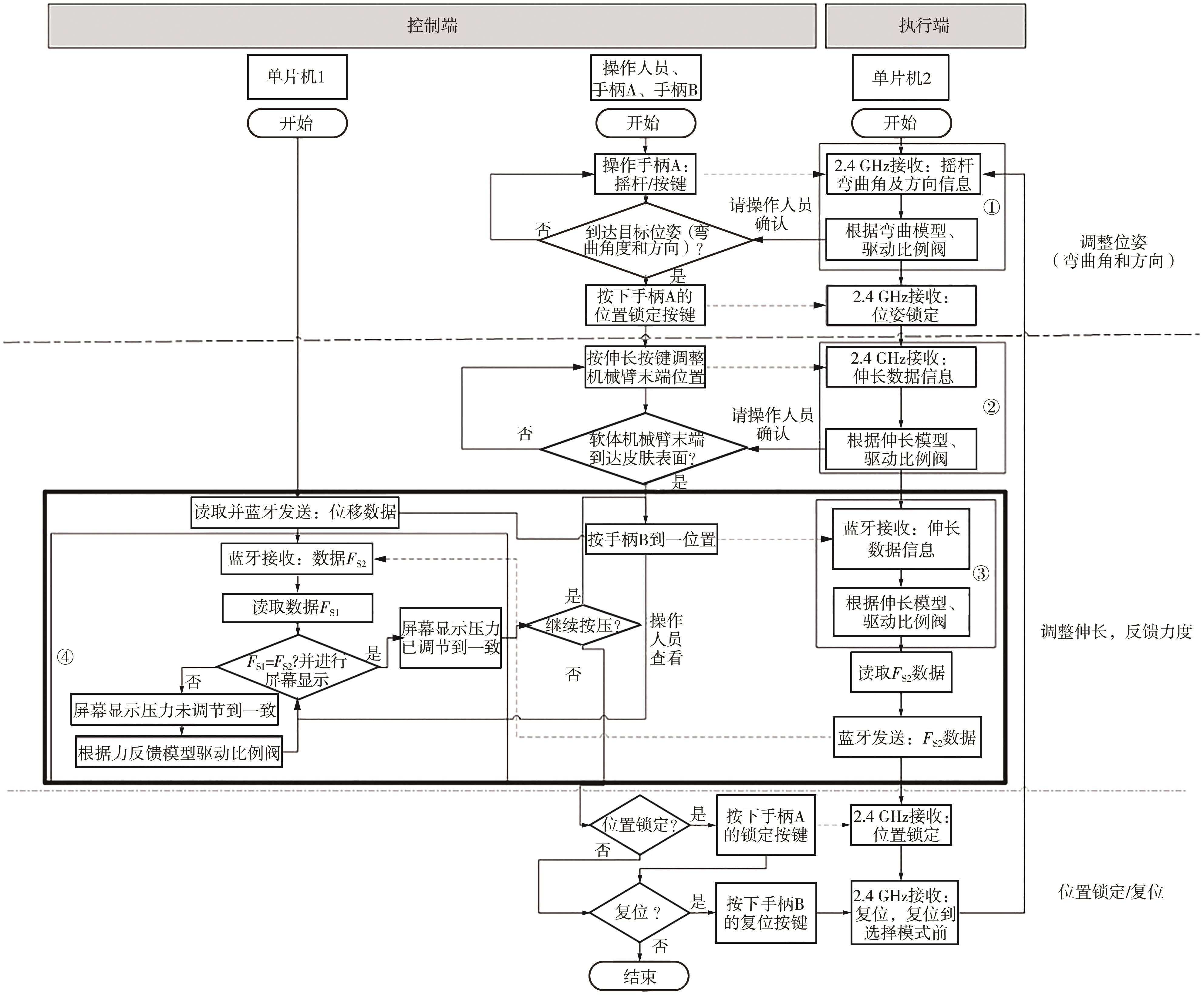
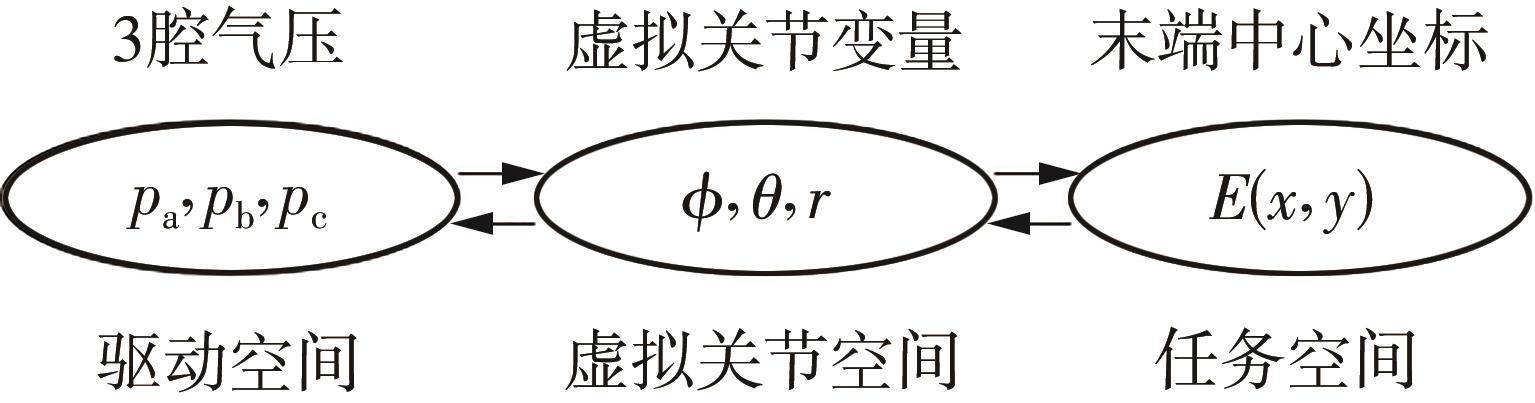
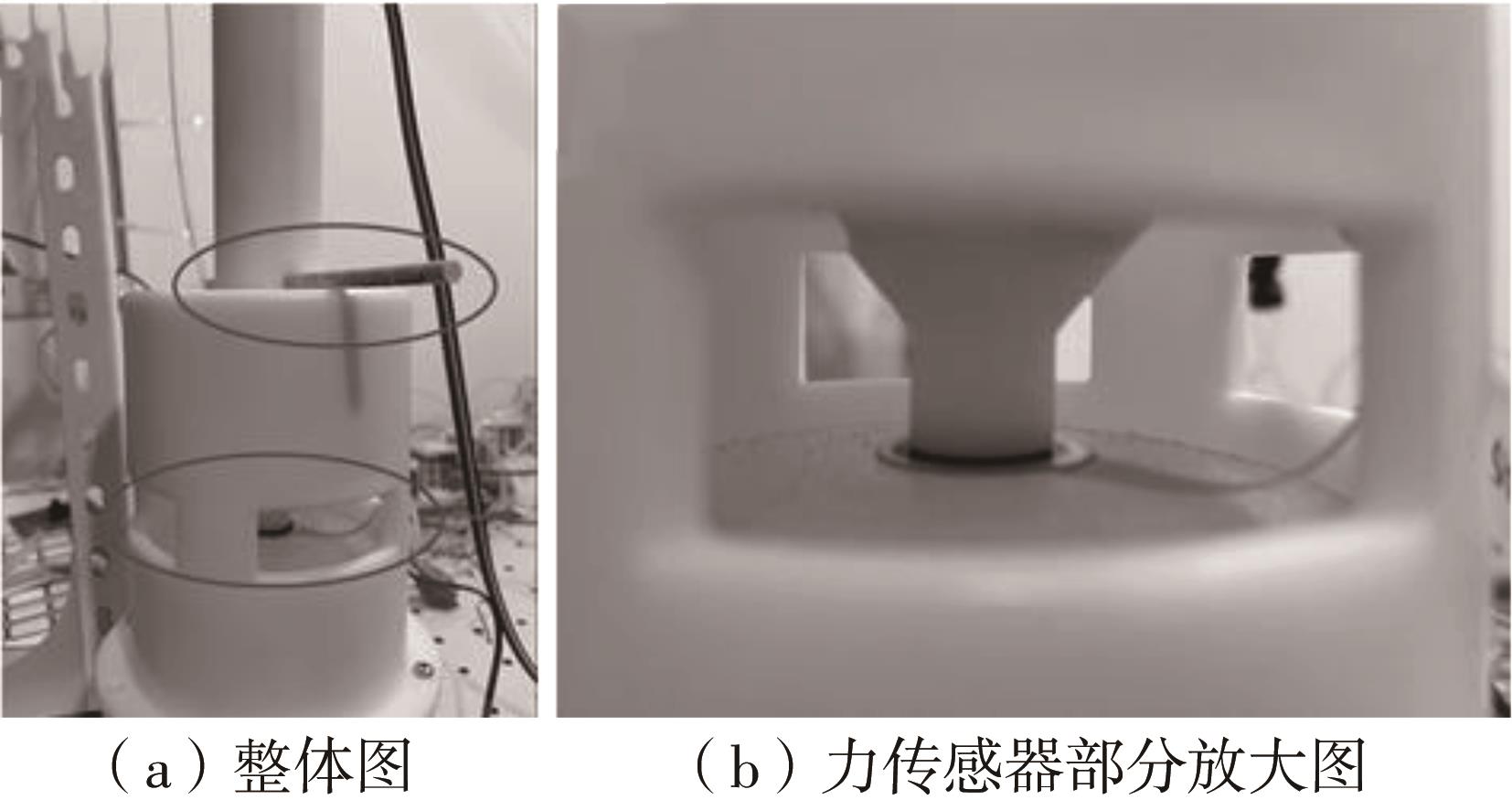
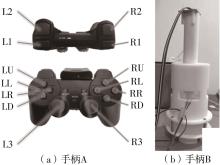
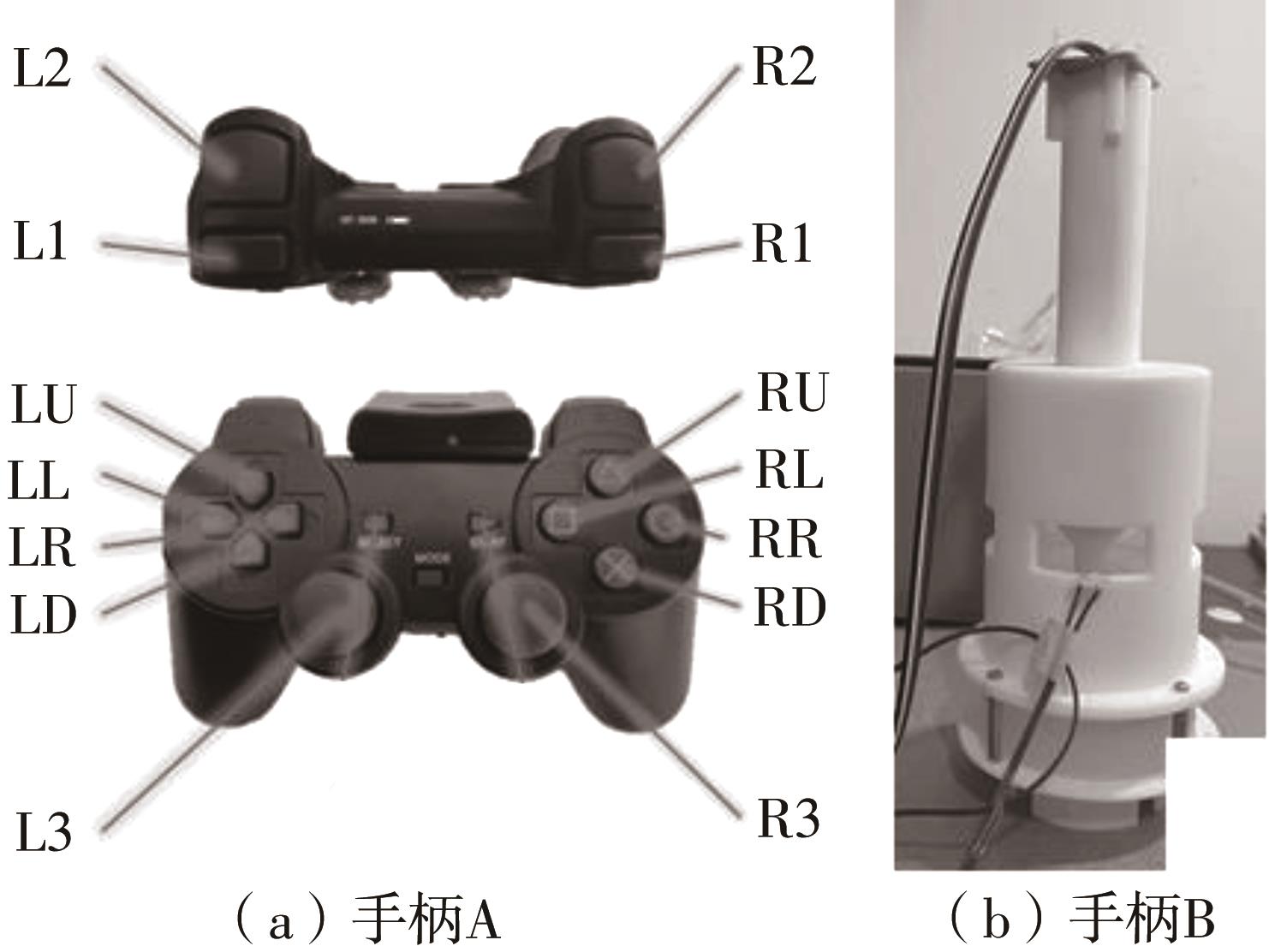
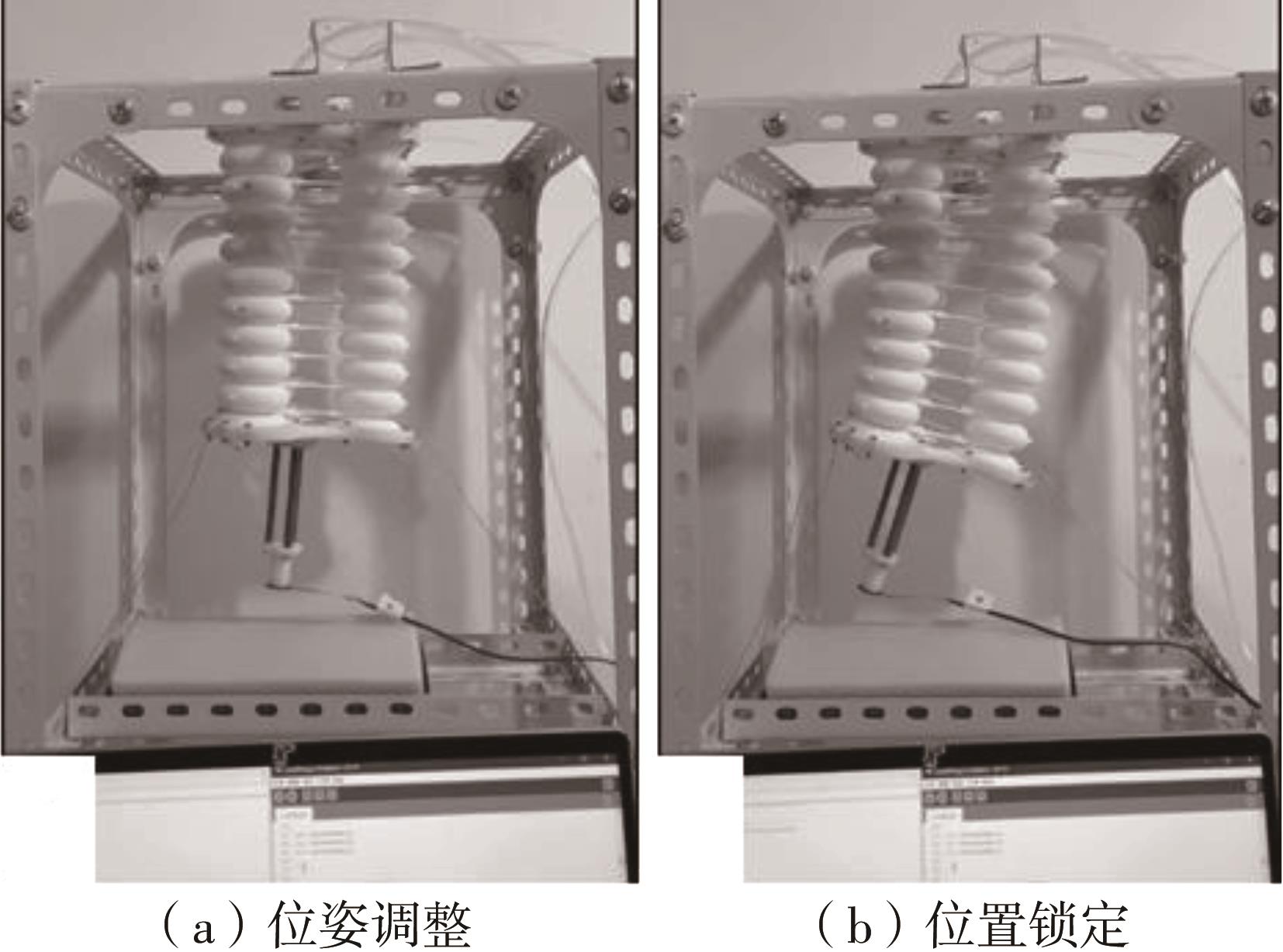
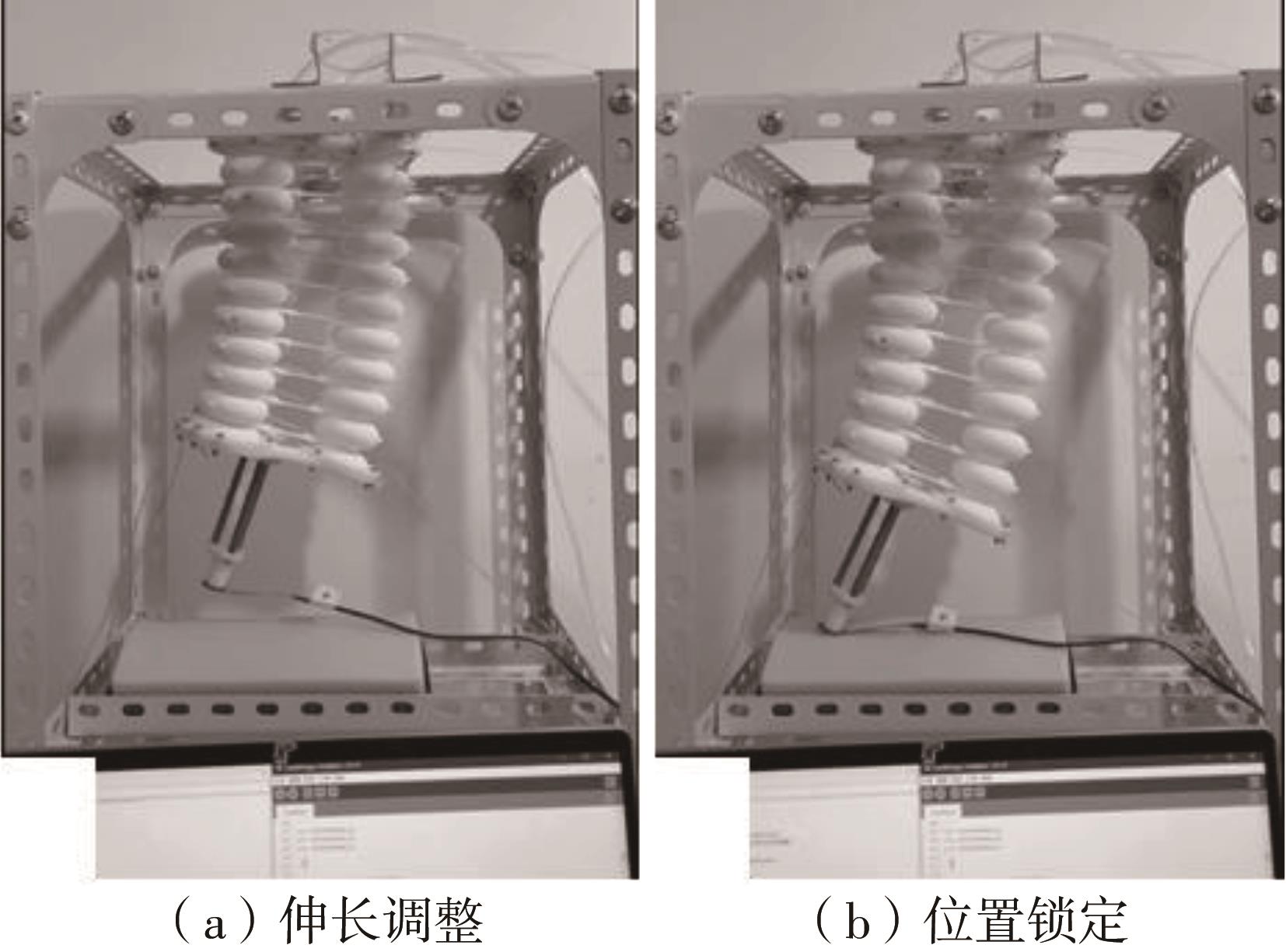
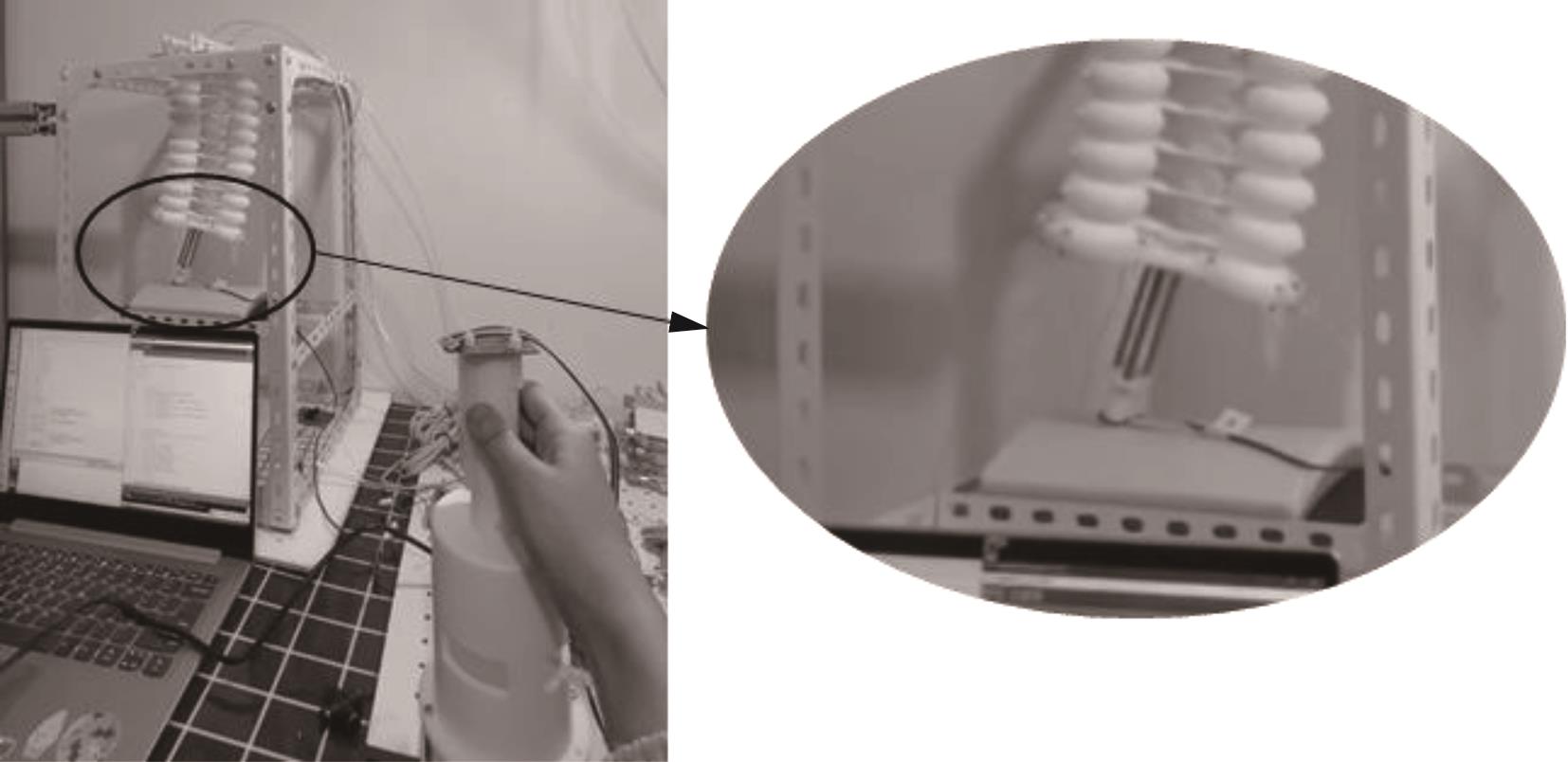
软体机械臂具有天然的柔顺性,作为末端执行器可以实现传统刚性机械臂难以实现的功能,例如可以轻松实现柔性抓取和柔性运动等,而且其对人体友好,在人机交互上具有高度的安全性。文中提出了一种软体机械臂的遥操作以及末端力反馈系统,并基于运动学模型和力反馈方法对其进行控制研究,建立了弯曲模型、伸长模型和力反馈模型,提出了控制方法和控制流程。操作人员通过操作手柄,实现了对位于另一物理空间的软体机械臂的遥操作控制,不仅能控制软体机械臂向任意方向弯曲,还可以控制其在曲率不变的情况下伸长。其中软体机械臂由3个周向均匀布置的波纹管构成,末端力反馈效果通过手柄内部的气动元件实现。该手柄是一种新型主手结构,包括手柄A和手柄B,分别控制软体机械臂的弯曲和伸长,且手柄B具有一定的力觉临场感。文中对提出的系统进行了实验验证,证明了软体机械臂在弯曲、伸长、力反馈阶段的功能,并配备皮肤模型验证软体机械臂作为末端执行器在超声波检测场景下的功能,实验数据表明,软体机械臂末端压力达7 N,力反馈控制循环时间在1 s左右。文中所建立的系统一方面发挥了软体机械臂的柔顺性,另一方面还增加了其远程控制的功能,并且带有力觉临场感,在未来可广泛应用在远程医疗、按摩等领域。
中图分类号: