华南理工大学学报(自然科学版) ›› 2025, Vol. 53 ›› Issue (12): 17-33.doi: 10.12141/j.issn.1000-565X.250037
无人机应急救援路径规划建模方法综述与展望
裴明阳1, 邵康顺1, 李林青2, 徐凤娟1,3
- 1.华南理工大学 土木与交通学院,广东 广州 510640
2.云南农业大学 机电工程学院,云南 昆明 650500
3.新疆工程学院 土木工程学院,新疆维吾尔自治区 乌鲁木齐 830000
-
收稿日期:2025-01-30出版日期:2025-12-25发布日期:2025-07-18 -
通信作者:徐凤娟(1985—),女,博士生,讲师,主要从事交通安全与低空系统研究。 E-mail:202110181583@mail.scut.edu.cn -
作者简介:裴明阳(1990 —),女,博士,副教授,主要从事智慧交通研究。E-mail: mingyang@scut.edu.cn -
基金资助:广东省基础与应用基础研究基金项目(2024A1515010617);广东省基础与应用基础研究基金项目(2025A1515010544);华南理工大学中央高校基本科研业务费专项资金项目(2024ZYGXZR053);广州市基础与应用基础研究专题(SL2023A04J00802);新疆煤炭资源绿色开采教育部重点实验室开放基金项目(KLXGY-KB2420)
Modeling Methodologies for Unmanned Aerial Vehicle Path Planning in Emergency Rescue: A Comprehensive Review and Prospect
PEI Mingyang1, SHAO Kangshun1, LI Linqing2, XU Fengjuan1,3
- 1.School of Civil Engineering and Transportation,South China University of Technology,Guangzhou 510640,Guangdong,China
2.College of Mechanical and Electrical Engineering,Yunnan Agricultural University,Kunming 650500,Yunnan,China
3.School of Civil Engineering,Xinjiang Institute of Engineering,Urumqi 830000,Xinjiang,China
-
Received:2025-01-30Online:2025-12-25Published:2025-07-18 -
Contact:徐凤娟(1985—),女,博士生,讲师,主要从事交通安全与低空系统研究。 E-mail:202110181583@mail.scut.edu.cn -
About author:裴明阳(1990 —),女,博士,副教授,主要从事智慧交通研究。E-mail: mingyang@scut.edu.cn -
Supported by:the Basic and Applied Basic Research Foundation of Guangdong Province(2024A1515010617)
摘要:
随着低空经济的兴起,无人机的应用场景不断扩展,尤其是在应急救援领域发挥着重要作用。无人机凭借其高机动性、远程控制等优势,在自然灾害与人为灾害等突发事件中,成为灾情监测、通信恢复、人员搜救、物资投递和灾后评估等关键环节的有力工具。该文旨在全面综述应急救援领域无人机路径规划的建模方法及其最新研究进展,为相关领域的研究者提供全面的理论参考和技术指导。首先概述了地震、火灾、洪灾等应急救援场景,归纳了无人机在不同场景中的应用需求;然后系统总结了无人机路径规划的建模方法,包括动态模型和任务模型,并对任务模型从分层、协同、容错、实时、自适应等维度进行了细分;进而从约束条件、优化目标及求解算法3个核心要素出发,全面分析了路径规划优化算法;最后探讨了无人机路径规划在应急救援中面临的挑战与机遇,指出技术发展、多无人机协同作业及多领域融合是未来发展的机遇,为无人机路径规划建模的进一步发展和应用提供了理论支持和实践参考。
中图分类号:
引用本文
裴明阳, 邵康顺, 李林青, 徐凤娟. 无人机应急救援路径规划建模方法综述与展望[J]. 华南理工大学学报(自然科学版), 2025, 53(12): 17-33.
PEI Mingyang, SHAO Kangshun, LI Linqing, XU Fengjuan. Modeling Methodologies for Unmanned Aerial Vehicle Path Planning in Emergency Rescue: A Comprehensive Review and Prospect[J]. Journal of South China University of Technology(Natural Science Edition), 2025, 53(12): 17-33.

图1
无人机应用场景"

表1
无人机应急救援应用"
| 年份 | 国家 | 无人机应急救援应用 |
|---|---|---|
| 1996 | 以色列 | 火鸟无人机探测监测火情[ |
| 2006 | 美国 | RQ-1捕食者无人机参与卡特琳娜飓风的搜索救援行动[ |
| 2008 | 中国 | 在汶川大地震期间利用无人机的遥感航拍技术获取灾情信息,深入灾区搜寻幸存者,对灾区的受灾情况进行初步的评价[ |
| 2011 | 日本 | RQ-4全球鹰无人机和微型无人机分别从高空和低近侦察日本核电站核反应堆及核心辐射水平[ |
| 2017 | 中国 | 无人机深入九寨沟地震灾区,获取高分辨率原始影像,对灾区开展喷洒消毒工作[ |
| 2023 | 中国 | 使用无人机将牵引滑轮和防坠护具、修理工具等送到被困人员处引导救援[ |
| 2025 | 中国 | 翼龙-2H应急救灾型无人机直达西藏定日县震中,侦察到多处关键灾情信息[ |
表2
自然灾害类型"
| 灾害类型 | 灾害描述 | 灾害特点 | 可采用救援方式 |
|---|---|---|---|
| 水旱灾害[ | 洪涝、干旱等 | 不可预测性、影响范围广、破坏力大 | 地面设备+无人机 |
| 气象灾害[ | 台风、冰雹、低温冷冻等 | 地面设备+无人机 | |
| 地震灾害[ | 地震引起的灾害 | 地面设备+无人机 | |
| 海洋灾害[ | 风暴潮、海浪、海啸等 | 海面设备+无人机 |
表3
人为灾害类型"
| 灾害类型 | 灾害描述 | 灾害特点 | 可采用救援方式 |
|---|---|---|---|
| 交通事故[ | 涉及运输工具的意外事件 | 突发性、高危害性、可预防性 | 地面设备+无人机 |
| 火灾[ | 由火源失控引起的灾害 | 地面设备+无人机 | |
| 化学泄露与爆炸[ | 化学品泄漏或爆炸、工业排放等 | 地面设备+无人机 | |
| 工程事故[ | 设计缺陷、施工错误或管理不善 | 地面设备+无人机 |
表4
无人机在不同应急救援场景中的应用需求"
| 救援场景 | 无人机的应用需求 | 文献 |
|---|---|---|
| 地震 | 人员搜救、临时基站、灾情评估 | [ |
| 火灾 | 火情监测、高层灭火、火情预警 | [ |
| 洪灾 | 灾情评估、洪水监测、人员搜寻 | [ |
| 爆炸 | 实时监控、人员搜救、辅助决策 | [ |
表5
无人机路径规划优化目标研究"
| 文献 | 最小化能耗 | 最大化任务完成率 | 最大化经济性 | 最大化安全性 | 最小化任务时间 |
|---|---|---|---|---|---|
| [ | √ | √ | |||
| [ | √ | √ | √ | ||
| [ | √ | √ | |||
| [ | √ | √ | √ | ||
| [ | √ | √ | |||
| [ | √ | √ | |||
| [ | √ | √ | |||
| [ | √ | √ | |||
| [ | √ | √ | |||
| [ | √ | √ | √ | ||
| [ | √ | √ | |||
| [ | √ | √ |
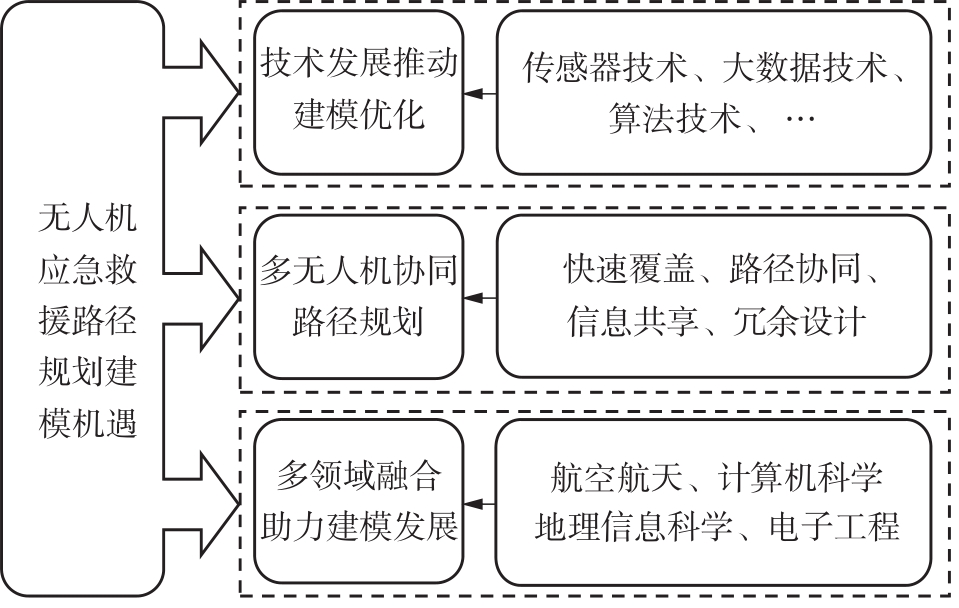
图2
无人机应急救援路径规划的发展机遇"
| [1] | 中国民航局 .2023年我国低空经济规模超过5000亿元[EB/OL].(2024-02-28)[2024-11-27].. |
| [2] | 新华网思客 .开年看中国丨翅膀上的中国:新赛道,“起飞”[EB/OL].(2025-01-12)[2025-01-17].. |
| [3] | 廖小罕,徐晨晨,叶虎平,等 .无人机应用发展关键基础设施与低空公共航路网规划[J].中国科学院院刊,2022,37(7):977-988. |
| LIAO Xiaohan, XU Chenchen, YE Huping,et al .Critical infrastructures for developing UAVs’ applications and low-altitude public air-route network planning[J].Bulletin of Chinese Academy of Sciences,2022,37(7):977-988. | |
| [4] | 邹湘伏,何清华,贺继林 .无人机发展现状及相关技术[J].飞航导弹,2006(10):9-14. |
| ZOU Xiangfu, HE Qinghua, HE Jilin .Current deve-lopment status of drones and related technologies[J].Aerospace Technology,2006(10):9-14. | |
| [5] | 郭庆华,胡天宇,刘瑾,等 .轻小型无人机遥感及其行业应用进展[J].地理科学进展,2021,40(9):1550-1569. |
| GUO Qinghua, HU Tianyu, LIU Jin,et al .Advances in light weight unmanned aerial vehicle remote sensing and major industrial applications[J].Progress in Geography,2021,40(9):1550-1569. | |
| [6] | 彭勇,黎元钧 .考虑疫情影响的卡车无人机协同配送路径优化[J].中国公路学报,2020,33(11):73-82. |
| PENG Yong, LI Yuan-jun .Optimization of truck-drone collaborative distribution route considering impact of epidemic[J].China Journal of Highway and Transport,2020,33(11):73-82. | |
| [7] | 大疆行业应用 .地震后如何快速响应?应急使命·2022无人机应用盘点[EB/OL].(2022-05-12)[2024-11-27].. |
| [8] | 张笛,张娜,闫书丽 .兼顾满意与稳定的应急救援服务供需匹配决策[J].计算机工程与应用,2023,59(22):300-306. |
| ZHANG Di, ZHANG Na, YAN Shuli .Matching deci-sion making of emergency rescue services supply and demand considering satisfaction and stability[J].Computer Engineering and Applications,2023,59(22):300-306. | |
| [9] | 安茂鹏 .高寒高海拔地区地震救援难题及解决策略研究[J].消防界(电子版),2024,10(10):93-95. |
| AN Maopeng .Research on difficulties and solutions for earthquake rescue in high-cold and high-altitude regions[J].Fire Safety World (Electronic Edition),2024,10(10):93-95. | |
| [10] | 李财,闫晓辉 .浅析无人机在消防领域的应用[C]∥ 2024年度灭火与应急救援技术学术研讨会论文集.珠海:中国人民公安大学、中国消防学会,2024:25-27. |
| [11] | 国务院 .国务院关于印发“十四五”国家应急体系规划的通知:国发〔2021〕36号[EB/OL].(2021-12-30)[2024-12-03].. |
| [12] | 于力,高明昊,龚杰 .国外救援无人机应用需求及发展趋势分析[J].飞航导弹,2018(4):33-36,82. |
| YU Li, GAO Minghao, GONG Jie .Analysis on application requirements and development trends of foreign rescue UAVs[J].Aerospace Technology,2018(4):33-36,82. | |
| [13] | 臧克,孙永华,李京,等 .微型无人机遥感系统在汶川地震中的应用[J].自然灾害学报,2010,19(3):162-166. |
| ZANG Ke, SUN Yong-hua, LI Jing,et al .Application of miniature unmanned aerial vehicle remote sen-sing system to Wenchuan earthquake[J].Journal of Natural Disasters,2010,19(3):162-166. | |
| [14] | DJI 媒体中心 .无人机全球救援人数超千人,无人机技术筑起应急救援守护[EB/OL].(2023-07-13)[2024-11-27].. |
| [15] | Techweb .大疆无人机在九寨沟地震区做了这些事 造福于人[EB/OL].(2017-08-15)[2025-01-17].. |
| [16] | 阮煜琳 .累计17小时空中抢险!翼龙-2H应急救灾型无人机直达西藏定日县震中[EB/OL].(2025-01-11)[2025-01-17].. |
| [17] | 陈彬,王翔汉,杨妹,等 .复杂灾害场景应急救援仿真软件技术发展综述[J].中国安全科学学报,2022,32(9):168-175. |
| CHEN Bin, WANG Xianghan, YANG Mei,et al .Review on development of simulation software technolo-gies for emergency rescue in complex disaster scenarios[J].China Safety Science Journal,2022,32(9):168-175. | |
| [18] | 王其,王磊,倪世松,等 .基于改进A*算法的应急救援无人机路径规划[J].计算机仿真,2024,41(6):84-88,353. |
| WANG Qi, WANG Lei, NI Shi-song,et al .Path planning of emergency rescue UAV based on improved A* algorithm[J].Computer Simulation,2024,41(6):84-88,353. | |
| [19] | 许云鹏,谢雅琪,于然,等 .感-通-物多目标融合应急无人机路径规划方法[J].通信学报,2024,45(4):1-12. |
| XU Yunpeng, XIE Yaqi, YU Ran,et al .Integrated perception-communication-logistics multi-objective orie-nted path planning for emergency UAVs[J].Journal on Communications,2024,45(4):1-12. | |
| [20] | CVETKOVIĆ V M, RENNER R, ALEKSOVA B,et al .Geospatial and temporal patterns of natural and man-made (technological) disasters (1900—2024):insights from different socio-economic and demographic perspectives[J].Applied Sciences,2024,14(18):8129/1-54. |
| [21] | 中国应急管理报 .防汛减灾新力量,无人机在城市内涝应急救援中的应用[EB/OL].(2023-08-21)[2025-01-01].. |
| [22] | 济南时报 .3名游客被困海上,无人机+救生机器人硬核“出战”[EB/OL].(2023-07-16)[2025-01-01].. |
| [23] | 南京日报 .“低空交警”火眼金睛本领大查违法、处事故,它都是一把好手[EB/OL].(2024-12-27)[2025-01-01].. |
| [24] | 李想 .无人机在高层建筑火灾中的应用[J].水上安全,2024(17):4-6. |
| LI Xiang .Application of UAVs in high-rise building fires[J].Maritime Safety,2024(17):4-6. | |
| [25] | 尤嵩菀,李功淼,沈同强 .浅谈无人化装备在抢险救灾中的运用——对两起特大爆炸事故救援的反思[J].中国应急救援,2019(5):56-59. |
| YOU Songwan, LI Gongmiao, SHEN Tongqiang .Brief discussion on the application of unmanned equipment in emergency rescue and disaster relief:Reflections on the rescue of two major explosion accidents[J].China Emergency Rescue,2019(5):56-59. | |
| [26] | 张琳,王金玉,王鑫,等 .重大自然灾害下多灾害点应急物资智能调度优化[J].清华大学学报(自然科学版),2023,63(5):765-774. |
| ZHANG Lin, WANG Jinyu, WANG Xin,et al .Intelligent dispatching optimization of emergency supplies to multidisaster areas in major natural disasters[J].Journal of Tsinghua University (Science and Techno-logy),2023,63(5):765-774. | |
| [27] | MEYER D, HESS M,LO E,et al .UAV-based post disaster assessment of cultural heritage sites following the 2014 South Napa Earthquake[C]∥ Proceedings of the 2015 Digital Heritage. Granada:IEEE,2015:421-424. |
| [28] | GÜRER B, KARSLIGIL M E .Damaged building detection from post-earthquake drone images using deep learning[C]∥ Proceedings of the 2024 32nd Signal Processing and Communications Applications Confe-rence (SIU).Mersin:IEEE,2024:1-4. |
| [29] | TARIQ R, RAHIM M, ASLAM N,et al .DronAID:A smart human detection drone for rescue[C]∥ Proceedings of the 2018 15th International Conference on Smart Cities:Improving Quality of Life Using ICT & IoT (HONET-ICT).Islamabad:IEEE,2018: 33-37. |
| [30] | CHEN X, HOPKINS B, WANG H,et al .Wildland fire detection and monitoring using a drone-collected RGB/IR image dataset[J].IEEE Access,2022,10:121301-121317. |
| [31] | DENG L, HE Y, LIU Q .Research on application of fire unmanned aerial vehicles in emergency rescue[C]∥ Proceedings of the 2019 9th International Confe-rence on Fire Science and Fire Protection Engineering (ICFSFPE).Chengdu:IEEE,2019:1-5. |
| [32] | KASETKASEM T, CHOEDPASUPORN S, NAPANG P .Rice addy flood damage severity assessment using drone images[C]∥ Proceedings of the 2024 IEEE International Geoscience and Remote Sensing Symposium. Athens:IEEE,2024:10250-10253. |
| [33] | DJI大疆行业应用 .空地协同,高效指调|大疆协助扑救深圳南山山火[EB/OL].(2024-11-07)[2024-11-29].. |
| [34] | 白露,孙铭然,黄子蔚,等 .面向应急通信的多无人机协同信道建模研究[J].通信学报,2023,44(7):38-50. |
| BAI Lu, SUN Mingran, HUANG Ziwei,et al .Multi-UAV cooperative channel model for emergency com-munication[J].Journal on Communications,2023,44(7):38-50. | |
| [35] | 环球网 .四川雅江突发森林火灾,翼龙-2型无人机增援[EB/OL].(2024-03-19)[2024-11-29].. |
| [36] | ZAI W, WANG J, LI G .A Drone scheduling method for emergency power material transportation based on deep reinforcement learning optimized PSO algorithm[J].Sustainability,2023,15(17):13127/1-29. |
| [37] | CHEN Y, LI W, YUE J .Dynamic path planning of UAV for three-dimensional moving target search in complex environment[C]∥ Proceedings of the 2021 IEEE International Conference on Emergency Science and Information Technology (ICESIT).Chongqing:IEEE,2021:770-775. |
| [38] | MOKRANE A, BRAHAM A C, CHERKI B .UAV path planning based on dynamic programming algorithm on photogrammetric DEMs[C]∥ Proceedings of the 2020 International Conference on Electrical Engineering (ICEE).Istanbul:IEEE,2020:1-5. |
| [39] | HOU X, LIU F, WANG R,et al .A UAV dynamic path planning algorithm[C]∥ Proceedings of the 2020 35th Youth Academic Annual Conference of Chinese Association of Automation (YAC).Zhanjiang:IEEE,2020:127-131. |
| [40] | CHENG X, JIANG R, SANG H,et al .Trace phero-mone-based energy-efficient UAV dynamic coverage using deep reinforcement learning[J].IEEE Transactions on Cognitive Communications and Networking,2024,10(3):1063-1074. |
| [41] | LI J, CHEN J, YI C,et al .Energy-efficient UAV swarm assisted MEC with dynamic clustering and sche-duling[C]∥ Proceedings of the 2024 IEEE Wireless Communications and Networking Conference (WCNC).Dubai:IEEE,2024:1-6. |
| [42] | ZHAO H, CHANG Z .Energy efficient trajectory optimization and resource allocation for HAP-assisted UAV wireless networks[C]∥ Proceedings of the 2023 IEEE Global Communications Conference. Kuala Lumpur:IEEE,2023:3765-3770. |
| [43] | JIA X, WU S, SUN J .UAV formation collaborative search and dynamic task allocation method under un-certain environment[C]∥ Proceedings of the 33rd Chinese Control Conference.Nanjing:IEEE,2014:947-953. |
| [44] | LU Y, ZHOU H, WANG H,et al .Online trajectory optimization and resource allocation in UAV-assisted NOMA-MEC systems[C]∥ Proceedings of the 2024 IEEE/ACM 32nd International Symposium on Quality of Service (IWQoS).Guangzhou:IEEE,2024:1-2. |
| [45] | 刘铭崴,朱庆,朱军,等 .多模态时空数据多层次可视化任务模型[J].测绘学报,2018,47(8):1098-1104. |
| LIU Mingwei, ZHU Qing, ZHU Jun,et al .The multi-level visualization task model for multi-modal spatio-temporal data[J].Acta Geodaetica et Cartogra-Phica Sinica,2018,47(8):1098-1104. | |
| [46] | 罗贺,王国强,胡笑旋,等 .基于Agent的多无人机任务分配模型[J].火力与指挥控制,2014,39(7):22-26. |
| LUO He, WANG Guo-qiang, HU Xiao-xuan,et al .Task allocation model for multi UAVs based on agents[J].Fire Control & Command Control,2014,39(7):22-26. | |
| [47] | WANG Q, HAN X, HE W,et al .Research on multi-UAV hierarchical task allocation in large-scale scenarios[J].Journal of Physics:Conference Series,2023,2478(10):102023/1-10. |
| [48] | WU X, ZHANG M, WANG X,et al .Hierarchical task assignment for multi-UAV system in large-scale group-to-group interception scenarios[J].Drones,2023,7(9):560/1-22. |
| [49] | MUKHERJEE A, MISRA S, CHANDRA V S P,et al .ECoR:energy-aware collaborative routing for task offload in sustainable UAV swarms[J].IEEE Tran-sactions on Sustainable Computing,2020,5(4):514-525. |
| [50] | BERA A, MISRA S, CHATTERJEE C .Energy-aware multi-UAV networks for on-demand task execution[C]∥ Proceedings of the 2020 IEEE International Conference on Communications Workshops (ICC Workshops).Dublin:IEEE,2020:1-6. |
| [51] | LUO Q, LUAN T H, SHI W,et al .Edge computing enabled energy-efficient multi-UAV cooperative target search[J].IEEE Transactions on Vehicular Techno-logy,2023,72(6):7757-7771. |
| [52] | SUI H, ZHANG H, GOU G,et al .Multi-UAV coo-perative and continuous path planning for high-resolution 3D scene reconstruction[J].Drones,2023,7(9):544/1-26. |
| [53] | BAI Z, LIN Y, CAO Y,et al .Delay-aware cooperative task offloading for multi-UAV enabled edge-cloud computing[J].IEEE Transactions on Mobile Compu-ting,2024,23(2):1034-1049. |
| [54] | HE J, SUN Z, CAO N,et al .Target attribute perception based UAV real-time task planning in dynamic environments[C]∥ Proceedings of the 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS).Detroit:IEEE,2023:888-895. |
| [55] | FLORENZAN REYES L F, SMARRA F, D’INNOCENZO A,et al .CADET:control-aware dynamic edge computing for real-time target tracking in UAV systems[C]∥ Proceedings of the 2023 IEEE International Conference on Acoustics,Speech and Signal Processing (ICASSP).Rhodes Island:IEEE,2023:1-5. |
| [56] | WANG B, ZHU D, HAN L,et al .Adaptive fault-tolerant control of a hybrid canard rotor/wing UAV under transition flight subject to actuator faults and model uncertainties[J].IEEE Transactions on Aerospace and Electronic Systems,2023,59(4):4559-4574. |
| [57] | YAO Z, KAN Z, ZHEN C,et al .Fault-tolerant control for carrier-based UAV based on sliding mode method[J].Drones,2023,7(3):194/1-19. |
| [58] | NASIR A, ALDURGAM M .Fault tolerant dynamic task assignment for UAV-based search teams[EB/OL].(2024-08-20)[2024-12-01]. |
| [59] | PAN M, XIA W, YU H,et al .Vehicle detection in UAV images via background suppression pyramid network and multi-scale task adaptive decoupled head[J].Remote Sensing,2023,15(24):5698/1-21. |
| [60] | LIU K, CHEN B M .Industrial UAV-based unsupervised domain adaptive crack recognitions:from database towards real-site infrastructural inspections[J].IEEE Transactions on Industrial Electronics,2023,70(9):9410-9420. |
| [61] | ZENG Z, FU R .Research on adaptive control approach of firefighting UAVs with fire-extinguishing bombs[C]∥ Proceedings of the 2022 China Automation Congress (CAC).Xiamen:IEEE,2022:3722-3726. |
| [62] | 苗苗,牛樱清,李晓辉,等 .带有禁飞区约束的物流无人机群路径规划[J].兰州大学学报(自然科学版),2023,59(1):98-105,111. |
| MIAO Miao, NIU Ying-qing, LI Xiao-hui,et al .Path planning of unmanned logistic aerial vehicle group under the constraint of a no-fly zone[J].Journal of Lanzhou University (Natural Sciences),2023,59(1):98-105,111. | |
| [63] | 孙淑光,孙涛 .基于融合A*算法的无人机路径规划研究[J].电子测量技术,2022,45(9):82-91. |
| SUN Shuguang, SUN Tao .Research on UAV path planning based on fusion A* algorithm[J].Electronic Measurement Technology,2022,45(9):82-91. | |
| [64] | 欧阳权,徐罗旻,杨继阳,等 .基于能耗优化的四旋翼无人机航迹规划:分段式高斯伪谱法[J].电光与控制,2025,32(1):1-7. |
| OUYANG Quan, XU Luo-min, YANG Ji-yang,et al .Energy-efficient trajectory planning for quadcopter UAVs:a segmented Gaussian pseudospectral approach[J].Electronics Optics & Control,2025,32(1):1-7. | |
| [65] | 费毓晗,张洪海,张连东,等 .城市物流无人机运输路径规划[J].武汉理工大学学报(交通科学与工程版),2023,47(1):79-84,89. |
| FEI Yuhan, ZHANG Honghai, ZHANG Liandong,et al .Urban logistics UAV transportation path planning[J].Journal of Wuhan University of Technology (Tra-nsportation Science & Engineering),2023,47(1):79-84,89. | |
| [66] | 王峰,张衡,韩孟臣,等 .基于协同进化的混合变量多目标粒子群优化算法求解无人机协同多任务分配问题[J].计算机学报,2021,44(10):1967-1983. |
| WANG Feng, ZHANG Heng, HAN Meng-Chen,et al .Co-evolution based mixed-variable multi-objective particle swarm optimization for UAV cooperative multi-task allocation problem[J].Chinese Journal of Computers,2021,44(10):1967-1983. | |
| [67] | 王茜,王翔宇,焦俊,等 .高空长航时太阳能无人机三维全覆盖航迹规划[J].北京航空航天大学学报,2025,51(8):2735-2747. |
| WANG Qian, WANG Xiangyu, JIAO Jun,et al .Three-dimensional complete coverage flight path planning for high-altitude long-endurance solar-powered UAV[J].Journal of Beijing University of Aeronautics and Astronautics,2025,51(8):2735-2747. | |
| [68] | ROBERGE V, TARBOUCHI M, LABONTE G .Com-parison of parallel genetic algorithm and particle swarm optimization for real-time UAV path planning[J].IEEE Transactions on Industrial Informatics,2013,9(1):132-141. |
| [69] | 范叶满,沈楷程,王东,等 .基于模拟退火算法的无人机山地作业能耗最优路径规划[J].农业机械学报,2020,51(10):34-41. |
| FAN Yeman, SHEN Kaicheng, WANG Dong,et al .Optimal energy consumption path planning of UAV on mountain region based on simulated annealing algorithm[J].Transactions of the Chinese Society for Agricultural Machinery,2020,51(10):34-41. | |
| [70] | 黄宇昊,韩超,赵明辉,等 .考虑安全飞行通道约束的无人机飞行轨迹多目标优化策略[J].上海交通大学学报,2022,56(8):1024-1033. |
| HUANG Yuhao, HAN Chao, ZHAO Minghui,et al .Multi-objective optimization strategy of trajectory pla-nning for unmanned aerial vehicles considering const-raints of safe flight corridors[J].Journal of Shanghai Jiaotong University,2022,56(8):1024-1033. | |
| [71] | ZHANG W, WANG J, LU Y .Cooperative delivery of truck-UAV with consideration of the UAV rack[C]∥ Proceedings of the 2023 19th International Conference on Natural Computation,Fuzzy Systems and Knowledge Discovery (ICNC-FSKD).Harbin:IEEE,2023:1-6. |
| [72] | 王莉莉,欧俊杰 .考虑电池充电的无人机车辆物流配送模型[J].科学技术与工程,2024,24(27):11834-11841. |
| WANG Li-li, Jun-jie OU .Vehicle-mounted drones logistics distribution model considering battery charging[J].Science Technology and Engineering,2024,24(27):11834-11841. | |
| [73] | 谢华,韩斯特,尹嘉男,等 .复杂城市低空无人机安全风险评估与三维路径规划[J].安全与环境学报,2024,24(7):2490-2507. |
| XIE Hua, HAN Site, YIN Jianan,et al .Safety risk assessment and three-dimensional path planning for UAV in complex urban low-altitude airspace[J].Journal of Safety and Environment,2024,24(7):2490-2507. | |
| [74] | 赵嶷飞,谷瑞嘉,任新惠 .考虑城市低空风场的小型无人机路径规划方法[J].北京航空航天大学学报,DOI:10.13700/j.bh.1001-5965.2024.0281 . |
| ZHAO Yifei, GU Ruijia, REN Xinhui .Method for small unmanned aerial vehicles path planning conside-ring urban low-altitude wind fields[J].Journal of Beijing University of Aeronautics and Astronautics,DOI:10.13700/j.bh.1001-5965.2024.0281 . | |
| [75] | SAADI A AIT, SOUKANE A, MERAIHI Y,et al .UAV path planning using optimization approaches:a survey[J].Archives of Computational Methods in Engineering,2022,29(6):4233-4284. |
| [76] | DIAO Q, ZHANG J, LIU M,et al .A disaster relief UAV path planning based on APF-IRRT* fusion algorithm[J].Drones,2023,7(5):323/1-17. |
| [77] | 陈锦涛,李鸿一,任鸿儒,等 .基于RRT森林算法的高层消防多无人机室内协同路径规划[J].自动化学报,2023,49(12):2615-2626. |
| CHEN Jin-tao, LI Hong-yi, REN Hong-ru,et al .Cooperative indoor path planning of multi-UAVs for high-rise fire fighting based on RRT-forest algorithm[J].Acta Automatic Sinica,2023,49(12):2615-2626. | |
| [78] | 刘文倩,单梁,张伟龙,等 .复杂环境下基于改进Informed RRT的无人机路径规划算法[J].上海交通大学学报,2024,58(4):511-524. |
| LIU Wenqian, SHAN Liang, ZHANG Weilong,et al .Unmanned aerial vehicle path planning algorithm based on improved informed RRT* in complex environment[J].Journal of Shanghai Jiaotong University,2024,58(4):511-524. | |
| [79] | 闫少华,石星雨,张兆宁 .基于改进A*算法的城市物流无人机三维路径规划[J].科学技术与工程,2024,24(29):12781-12788. |
| YAN Shao-hua, SHI Xing-yu, ZHANG Zhao-ning .Three-dimensional path planning of urban logistics UAVs[J].Science Technology and Engineering,2024,24(29):12781-12788. | |
| [80] | BUCCAFURRI F, SCOLERI F .A greedy method for coverage path planning of autonomous heterogeneous UAVs[C]∥ Proceedings of the 2023 9th International Conference on Control,Decision and Information Technologies (CoDIT).Rome:IEEE,2023:157-160. |
| [81] | 吴越安,杜昌平,杨睿,等 .基于改进遗传算法的倾转旋翼无人机区域覆盖路径规划[J].浙江大学学报(工学版),2024,58(10):2031-2039. |
| WU Yue’ an, DU Changping, YANG Rui,et al .Area coverage path planning for tilt-rotor unmanned aerial vehicle based on enhanced genetic algorithm[J].Journal of Zhejiang University (Engineering Science),2024,58(10):2031-2039. | |
| [82] | ZHENG J, DING M, SUN L,et al .Distributed stochastic algorithm based on enhanced genetic algorithm for path planning of multi-UAV cooperative area search[J].IEEE Transactions on Intelligent Transportation Systems,2023,24(8):8290-8303. |
| [83] | LIU H, GE J, WANG Y,et al .Multi-UAV optimal mission assignment and path planning for disaster rescue using adaptive genetic algorithm and improved artificial bee colony method[J].Actuators,2022,11(1):4/1-30. |
| [84] | 李宪强,马戎,张伸,等 .蚁群算法的改进设计及在航迹规划中的应用[J].航空学报,2020,41(S2):213-219. |
| LI Xianqiang, MA Rong, ZHANG Shen,et al .Improved design of ant colony algorithm and its application in path planning[J].Acta Aeronautica et Astronautica Sinica,2020,41(S2):213-219. | |
| [85] | 王翼虎,王思明 .基于改进粒子群算法的无人机路径规划[J].计算机工程与科学,2020,42(9):1690-1696. |
| WANG Yi-hu, WANG Si-ming .UAV path planning based on improved particle swarm optimization[J].Computer Engineering & Science,2020,42(9):1690-1696. | |
| [86] | SONNY A, YEDURI S R, CENKERAMADDI L R .Autonomous UAV path planning using modified PSO for UAV-assisted wireless networks[J].IEEE Access,2023,11:70353-70367. |
| [87] | 周成,雍鹏程,刘宁,等 .基于模拟退火的多无人机路网巡边路径规划[J].火力与指挥控制,2024,49(7):24-29. |
| ZHOU Cheng, YONG Pengcheng, LIU Ning,et al .Path planning based on simulated annealing for multi-UAVs road network patrol[J].Fire Control & Comma-nd Control,2024,49(7):24-29. | |
| [88] | LIU Q, ZHANG Y, LI M,et al .Multi-UAV path planning based on fusion of sparrow search algorithm and improved bioinspired neural network[J].IEEE Access,2021,9:124670-124681. |
| [89] | KONG F, WANG Q, GAO S,et al .B-APFDQN:a UAV path planning algorithm based on deep Q-network and artificial potential field[J].IEEE Access,2023,11:44051-44064. |
| [90] | 吕超,李慕宸,欧家骏 .基于分层深度强化学习的无人机混合路径规划[J].北京航空航天大学学报,2025,51(10):3451-3459. |
| Chao LYU, LI Muchen, Jiajun OU .UAV hybrid path planning based on hierarchical deep reinforcement learning[J].Journal of Beijing University of Aeronautics and Astronautics,2025,51(10):3451-3459. | |
| [91] | 付澍,杨祥月,张海君,等 .物联网数据收集中无人机路径智能规划[J].通信学报,2021,42(2):124-133. |
| FU Shu, YANG Xiangyue, ZHANG Haijun,et al .UAV path intelligent planning in IoT data collection[J].Journal on Communications,2021,42(2):124-133. | |
| [92] | ZHANG Z, WANG S, CHEN J,et al .A bionic dynamic path planning algorithm of the micro UAV based on the fusion of deep neural network optimization/filte-ring and hawk-eye vision[J].IEEE Transactions on Systems,Man,and Cybernetics:Systems,2023,53(6):3728-3740. |
| [1] | 董敏, 赖酉城, 毕盛. 基于多模态场景记忆与指令提示的目标导航方法[J]. 华南理工大学学报(自然科学版), 2026, 54(2): 1-15. |
| [2] | 李伟, 刘嘉晨, 张伟源, 黄日红, 白晶, 姜潮. 一种可实现位姿自由调整的应急救援机器人属具快换装置[J]. 华南理工大学学报(自然科学版), 2025, 53(5): 11-19. |
| [3] | 贾华宇, 郑会龙, 周洪, 张谦. 基于SSA-BP神经网络的无人机发射参数择优[J]. 华南理工大学学报(自然科学版), 2025, 53(4): 90-101. |
| [4] | 程国柱, 薛道安, 顾爽. 基于曲线组合与数值优化的狭窄通道平行泊车路径规划方法[J]. 华南理工大学学报(自然科学版), 2025, 53(11): 77-89. |
| [5] | 姚道金, 殷雄, 罗真, 等. 复杂环境下AGVS路径规划算法[J]. 华南理工大学学报(自然科学版), 2023, 51(11): 56-62. |
| [6] | 温惠英, 元昱青, 林译峰. 考虑道路负载均衡的码头多AGV无冲突路径规划[J]. 华南理工大学学报(自然科学版), 2023, 51(10): 1-10. |
| [7] | 陈朋, 江勇奇, 俞天纬, 等. 基于局部软约束优化的无人机航迹规划方法[J]. 华南理工大学学报(自然科学版), 2022, 50(6): 27-36. |
| [8] | 陈鹏, 陈洋, 王威. 无人机声学定位技术综述[J]. 华南理工大学学报(自然科学版), 2022, 50(12): 109-123. |
| [9] | 张香竹, 张立家, 宋逸凡, 等. 基于深度学习的无人机单目视觉避障算法[J]. 华南理工大学学报(自然科学版), 2022, 50(1): 101-108, 131. |
| [10] | 魏武, 韩进, 李艳杰, 等. 基于双树 Quick-RRT* 算法的移动机器人路径规划[J]. 华南理工大学学报(自然科学版), 2021, 49(7): 51-58. |
| [11] | 温惠英, 林译峰, 吴昊书, 等. 基于城市道路交通环境演变的 ECEA 路径规划算法[J]. 华南理工大学学报(自然科学版), 2021, 49(10): 1-10. |
| [12] | 张家旭, 杨雄, 施正堂, 等. 汽车紧急换道避障的路径规划与跟踪控制[J]. 华南理工大学学报(自然科学版), 2020, 48(9): 86-93,106. |
| [13] | 马如进 董一庆 潘子超 潘玥. 基于消费级无人机的古桥三维重构分析[J]. 华南理工大学学报(自然科学版), 2019, 47(6): 94-100,126. |
| [14] | 赵星 吉康 林灏 徐鹏. 基于多目标路径规划的应急资源配置模型[J]. 华南理工大学学报(自然科学版), 2019, 47(4): 76-82. |
| [15] | 陈康 李佳骏 王骜 杨忠振. 考虑公共空间占用成本的共享单车投放密度优化研究 [J]. 华南理工大学学报(自然科学版), 2019, 47(2): 137-144. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||

