华南理工大学学报(自然科学版) ›› 2025, Vol. 53 ›› Issue (5): 11-19.doi: 10.12141/j.issn.1000-565X.240408
一种可实现位姿自由调整的应急救援机器人属具快换装置
李伟1(), 刘嘉晨1, 张伟源1, 黄日红2, 白晶3, 姜潮1
- 1.湖南大学 机械与运载工程学院,湖南 长沙 410082
2.中国人民解放军某部 教研室,广东 广州 510000
3.中联重科股份有限公司,湖南 长沙 410013
A Quick Coupling Device with Free Posture Adjustment Used for Emergency Rescue Robot Attachments
LI Wei1(), LIU Jiachen1, ZHANG Weiyuan1, HUANG Rihong2, BAI Jing3, JIANG Chao1
- 1.College of Mechanical and Vehicle Engineering,Hunan University,Changsha 410082,Hunan,China
2.Teaching and Research Office,A Certain Unit of the PLA,Guangzhou 510000,Guangdong,China
3.Zoomlion Heavy Industry Science and Technology Co. ,Ltd. ,Changsha 410013,Hunan,China
摘要:
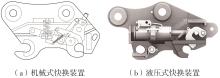
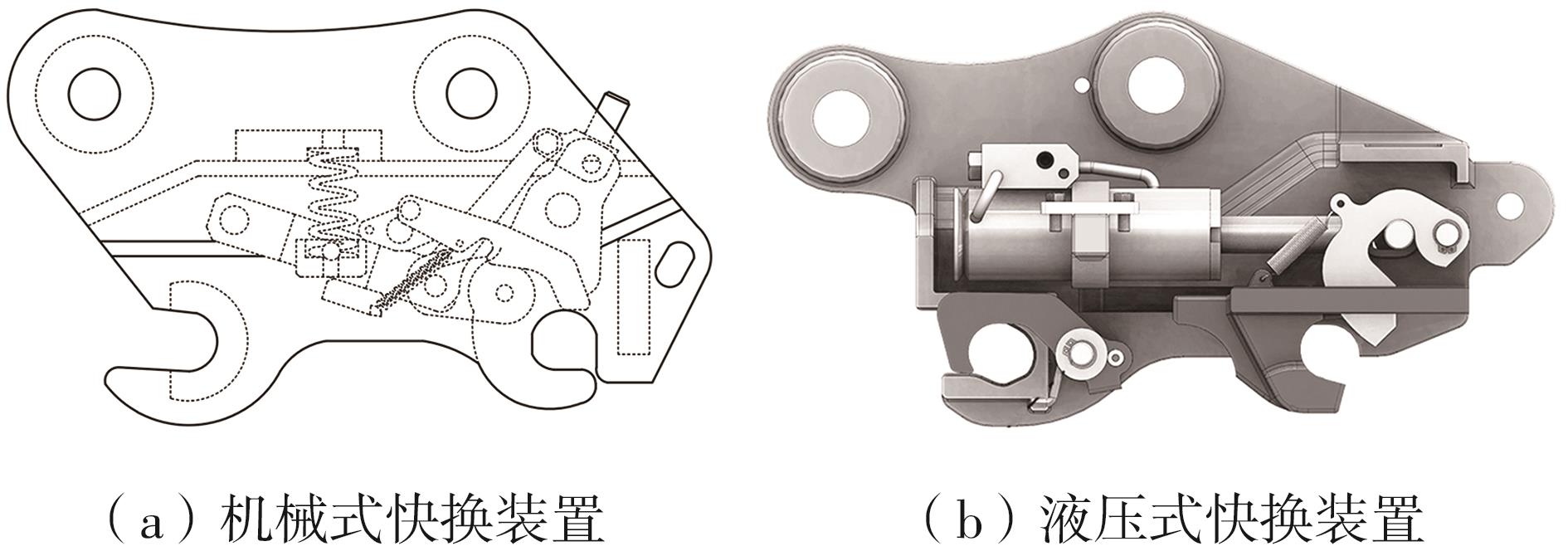
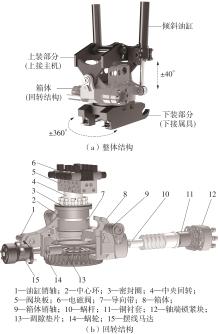
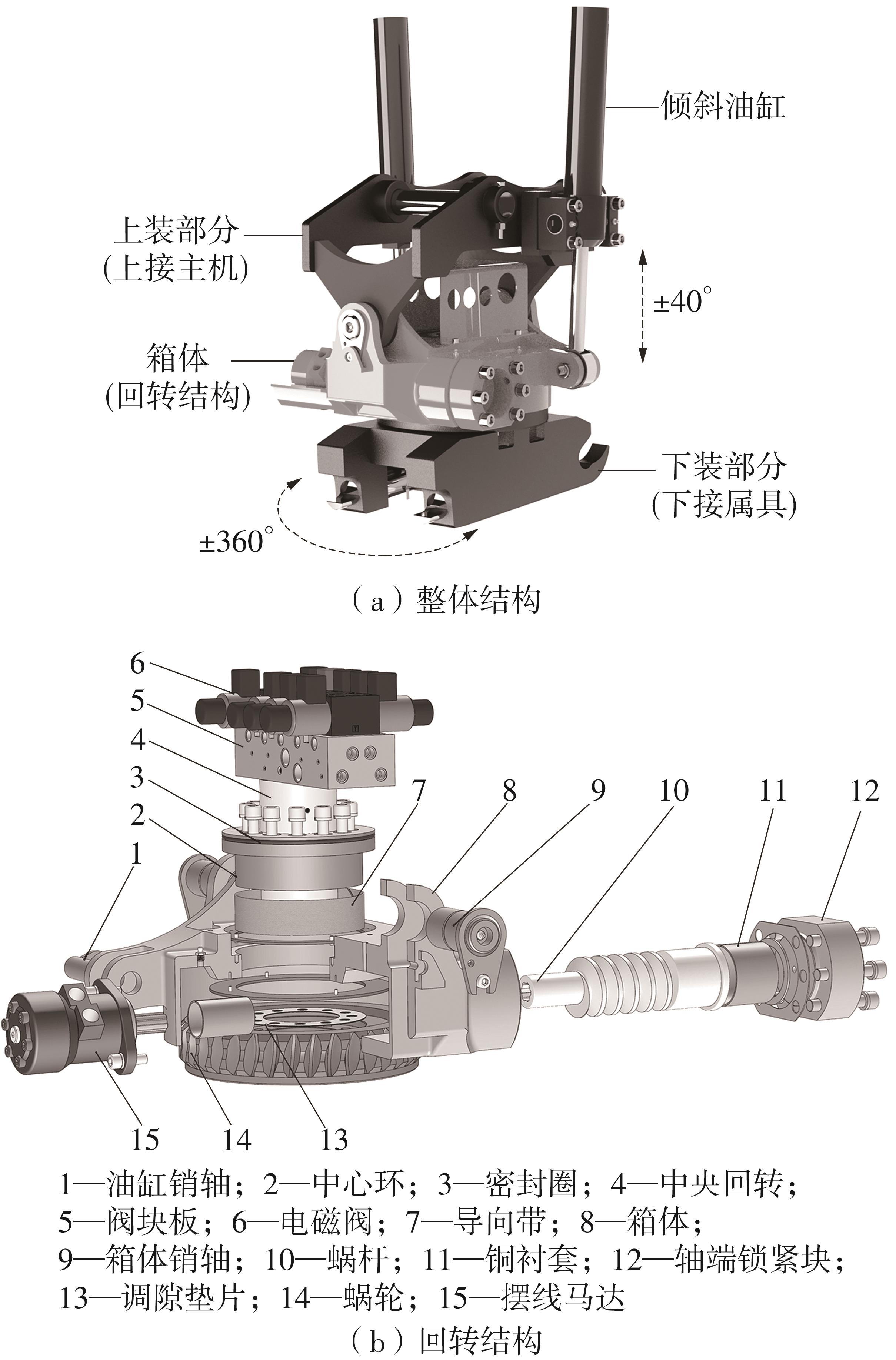
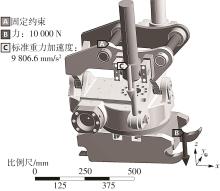
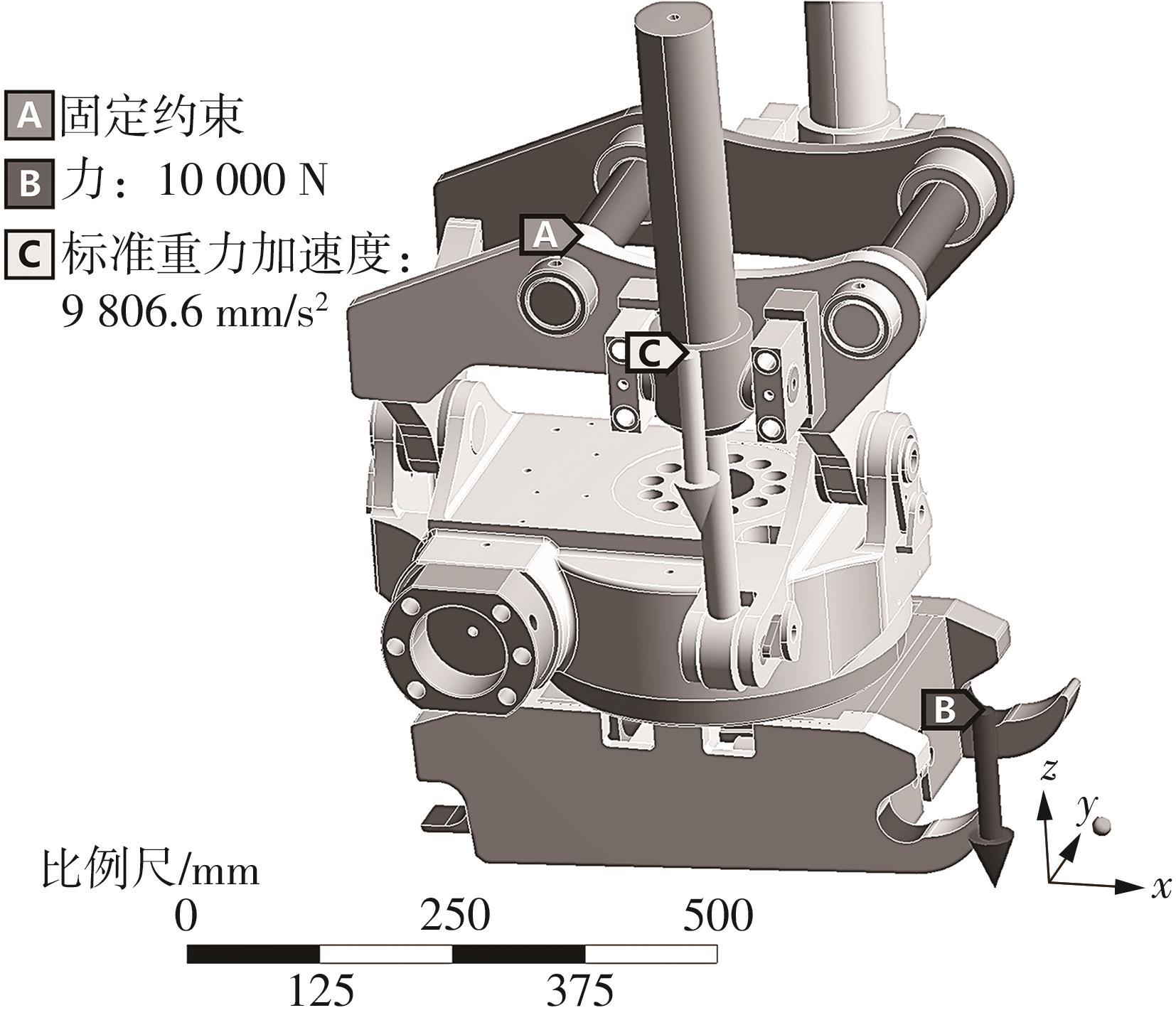
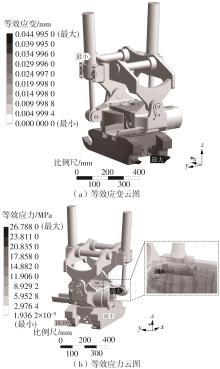
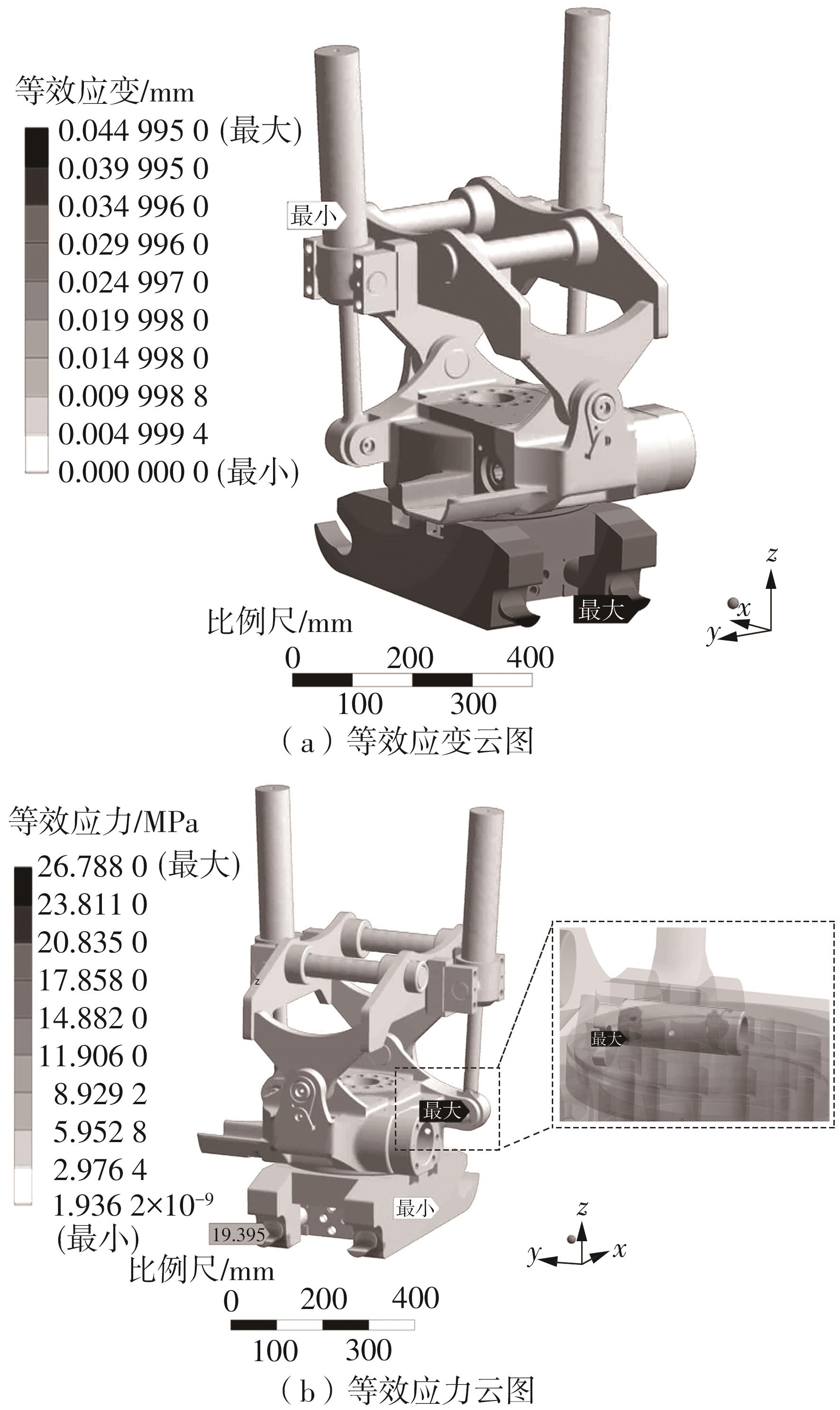
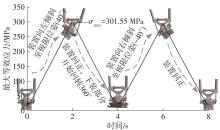
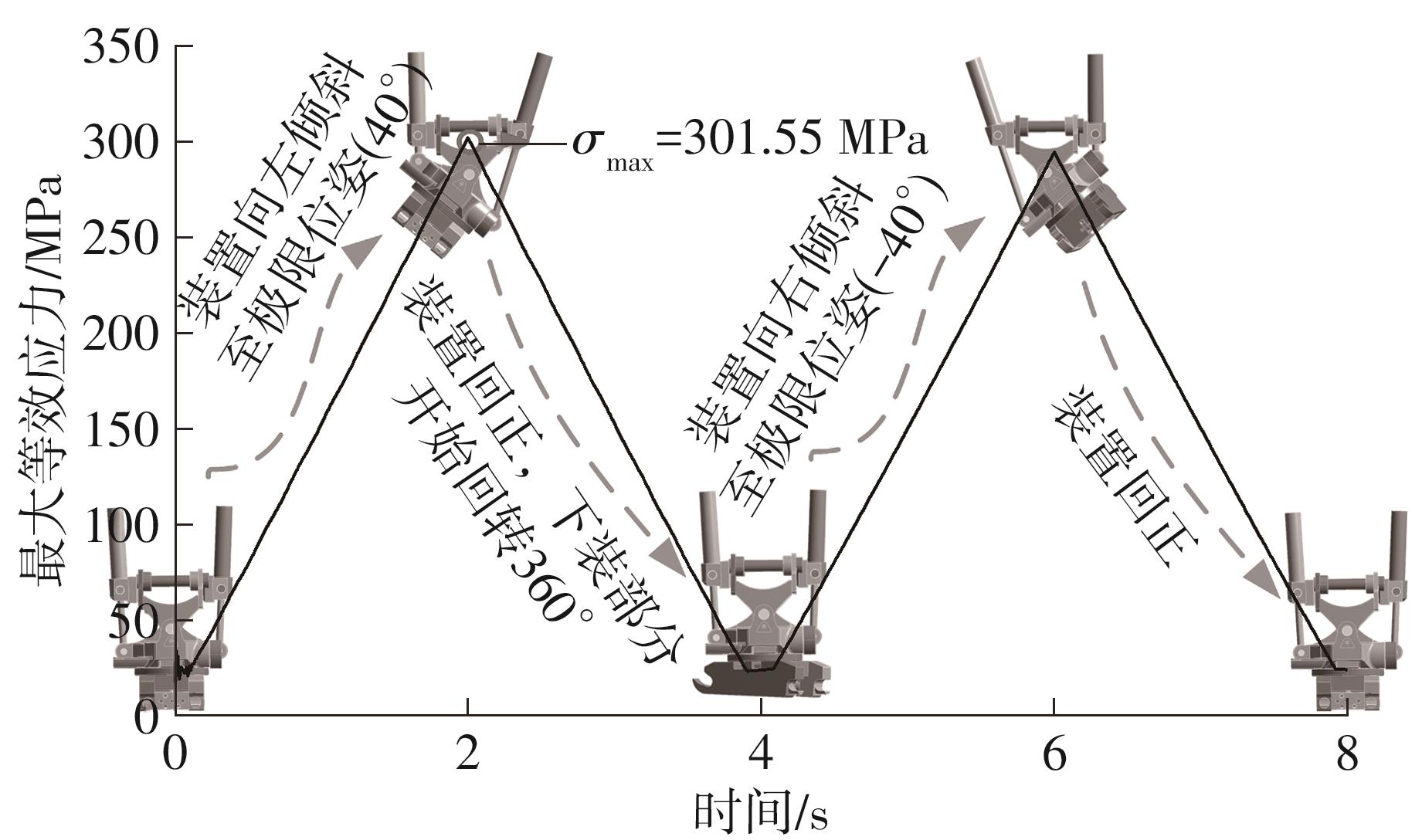
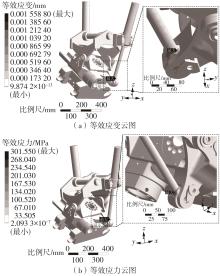
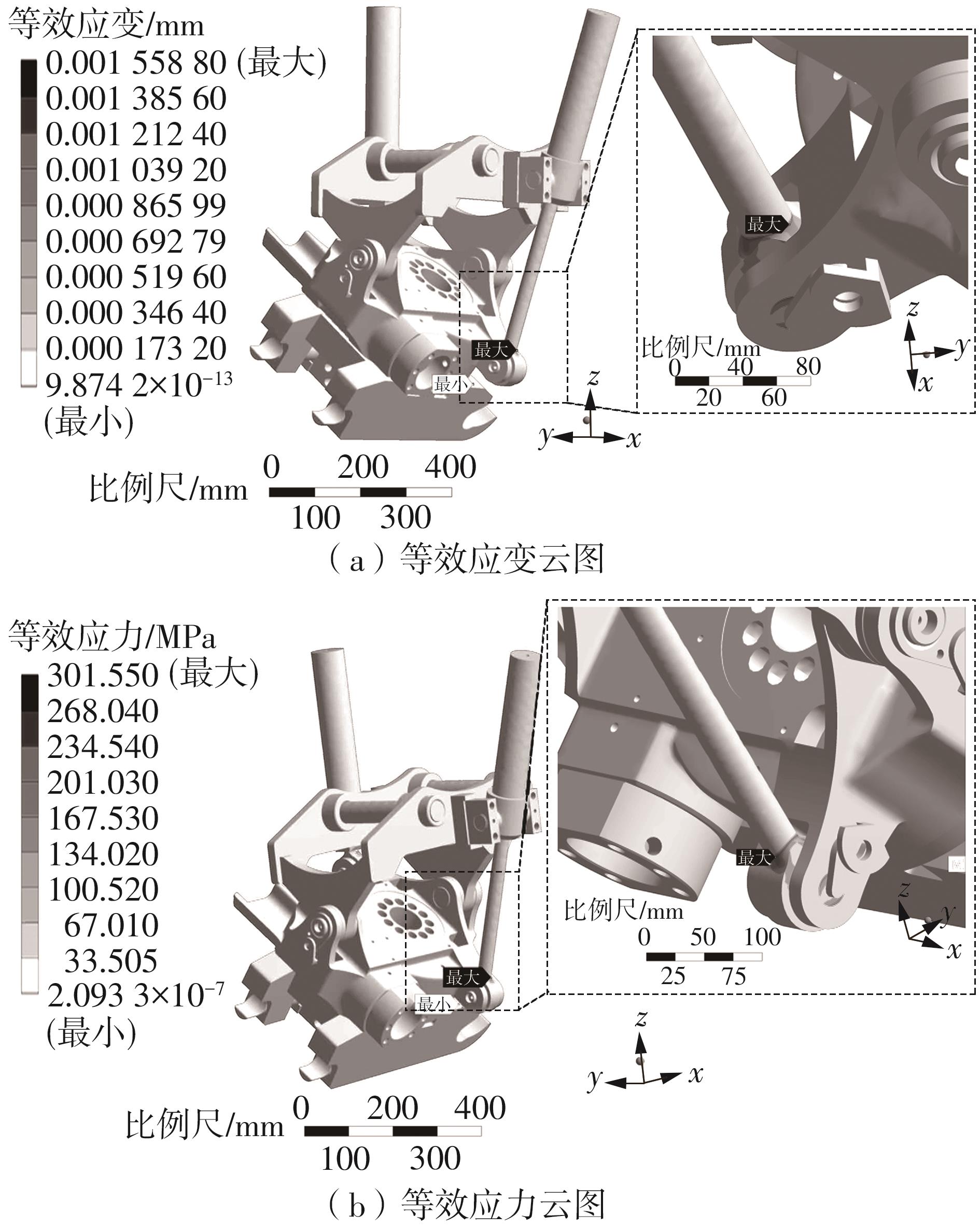
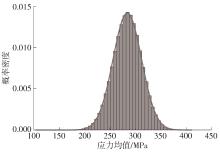
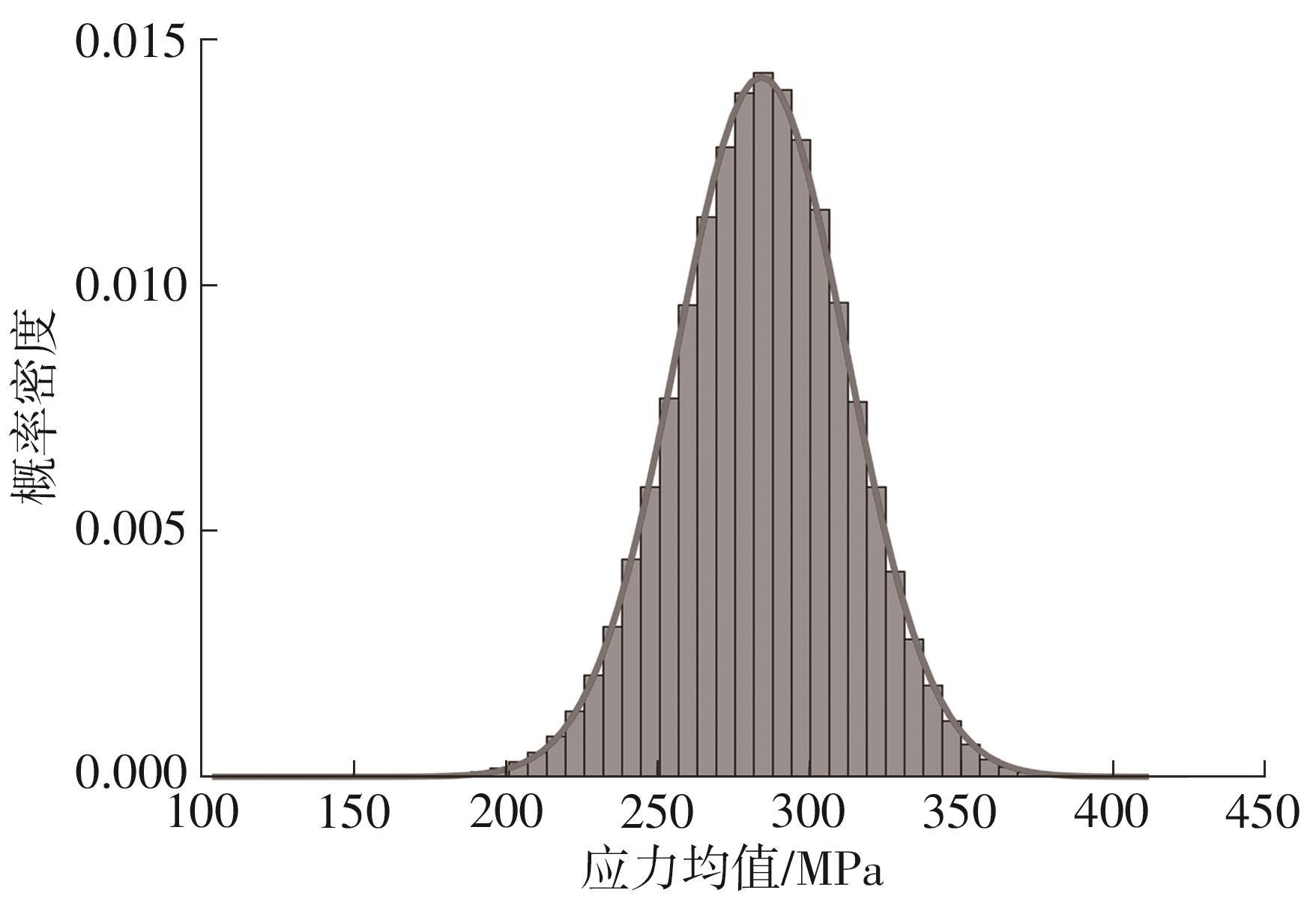
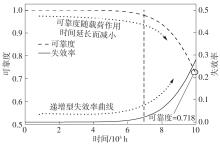
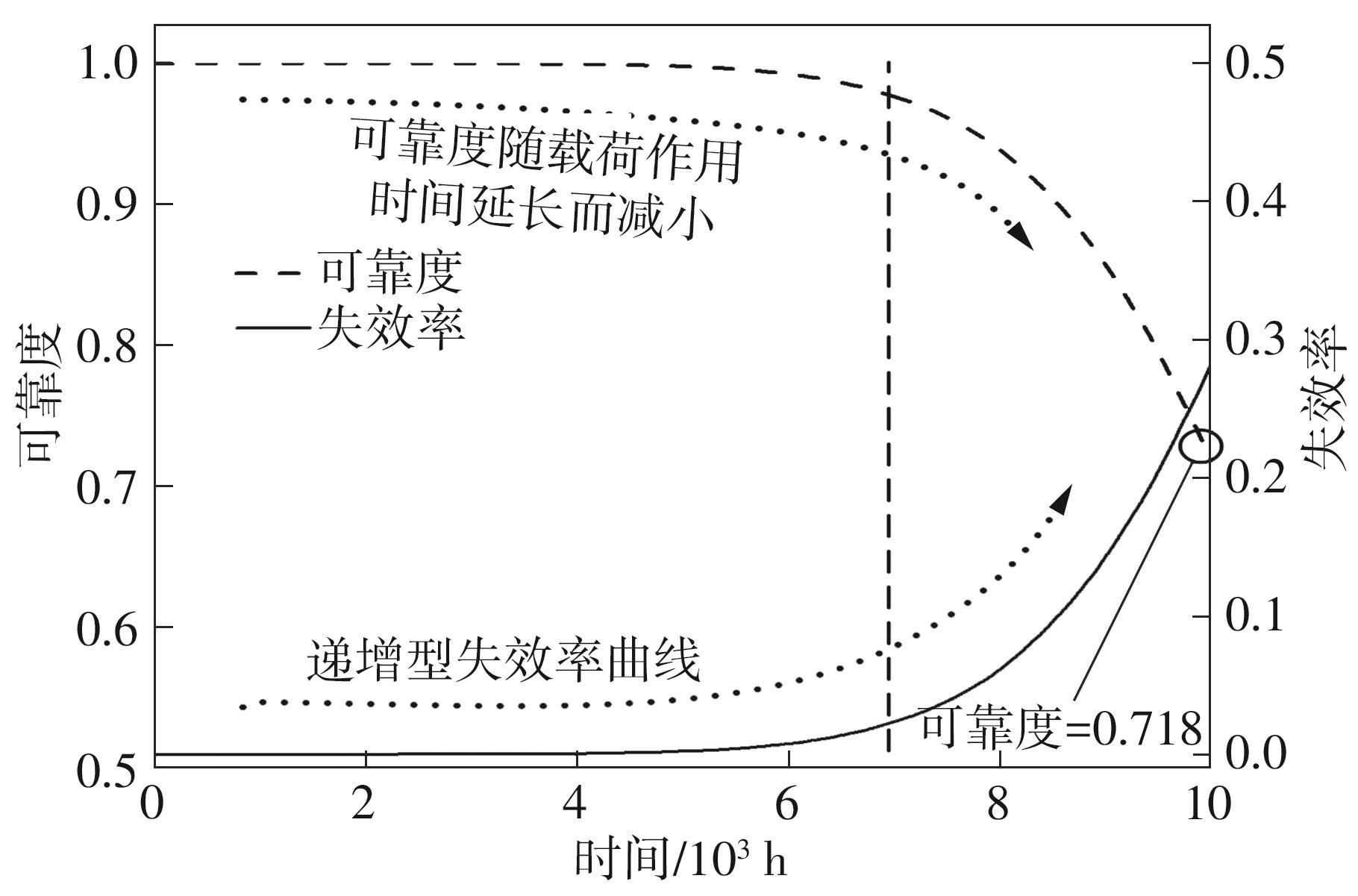
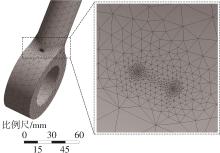
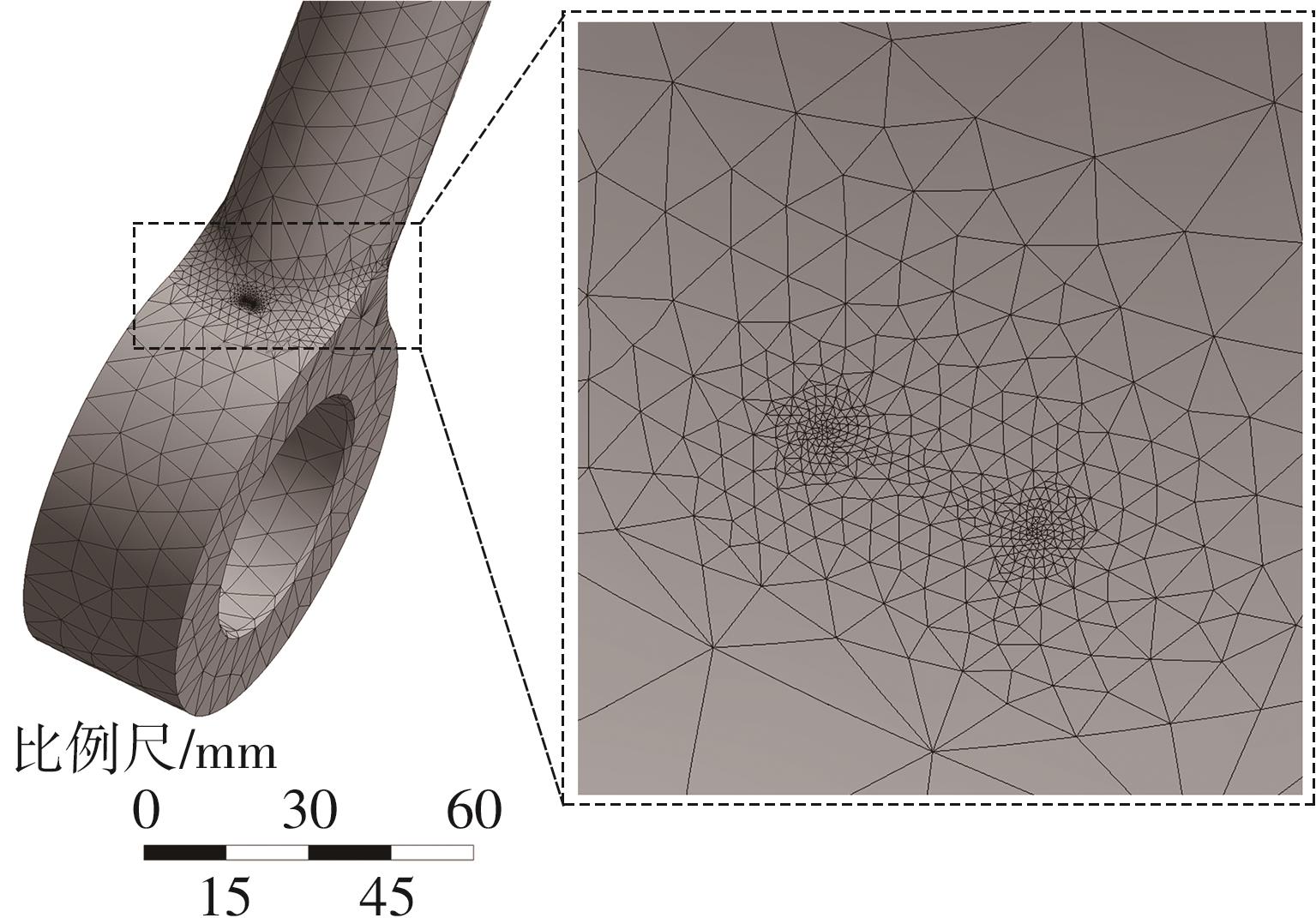
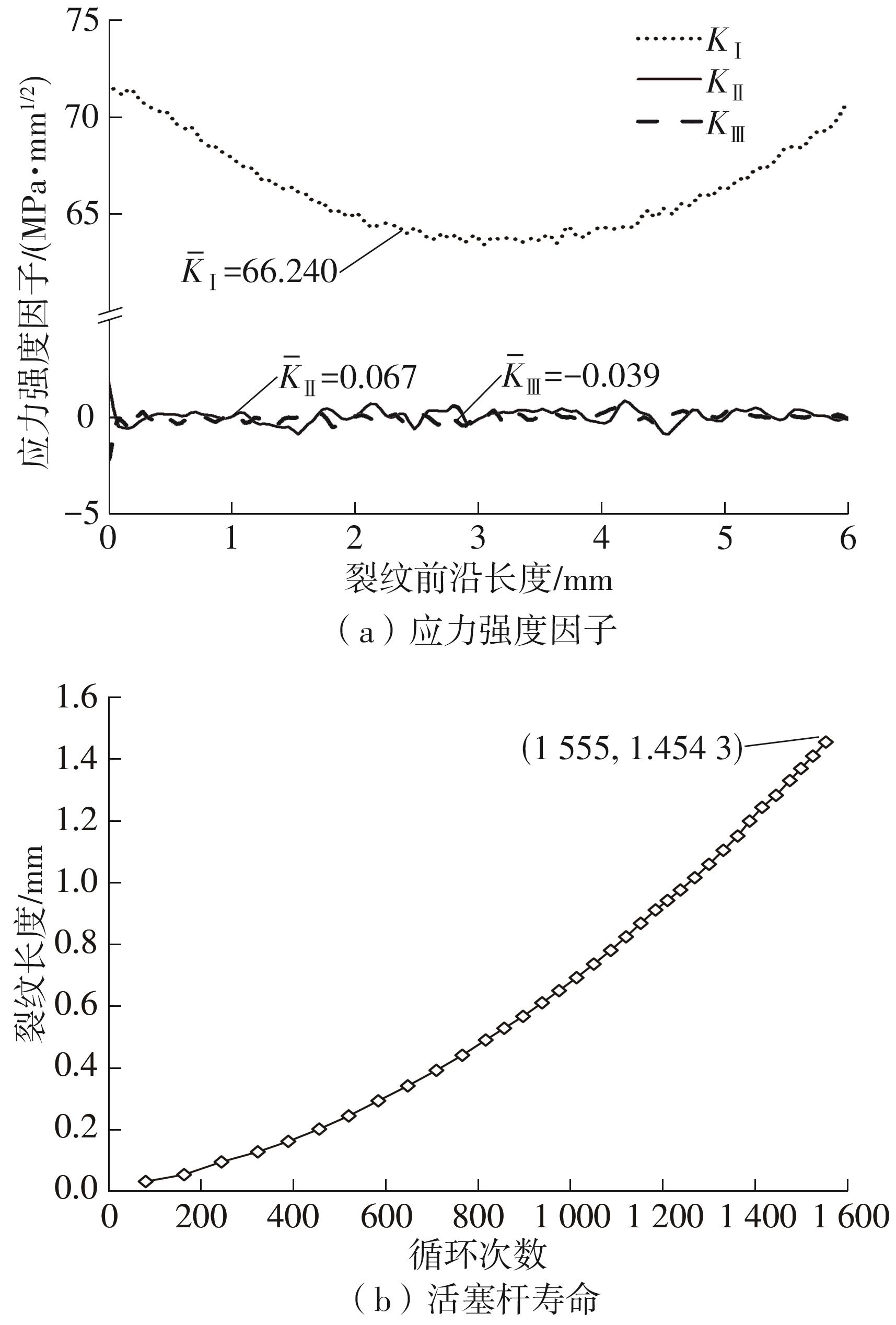
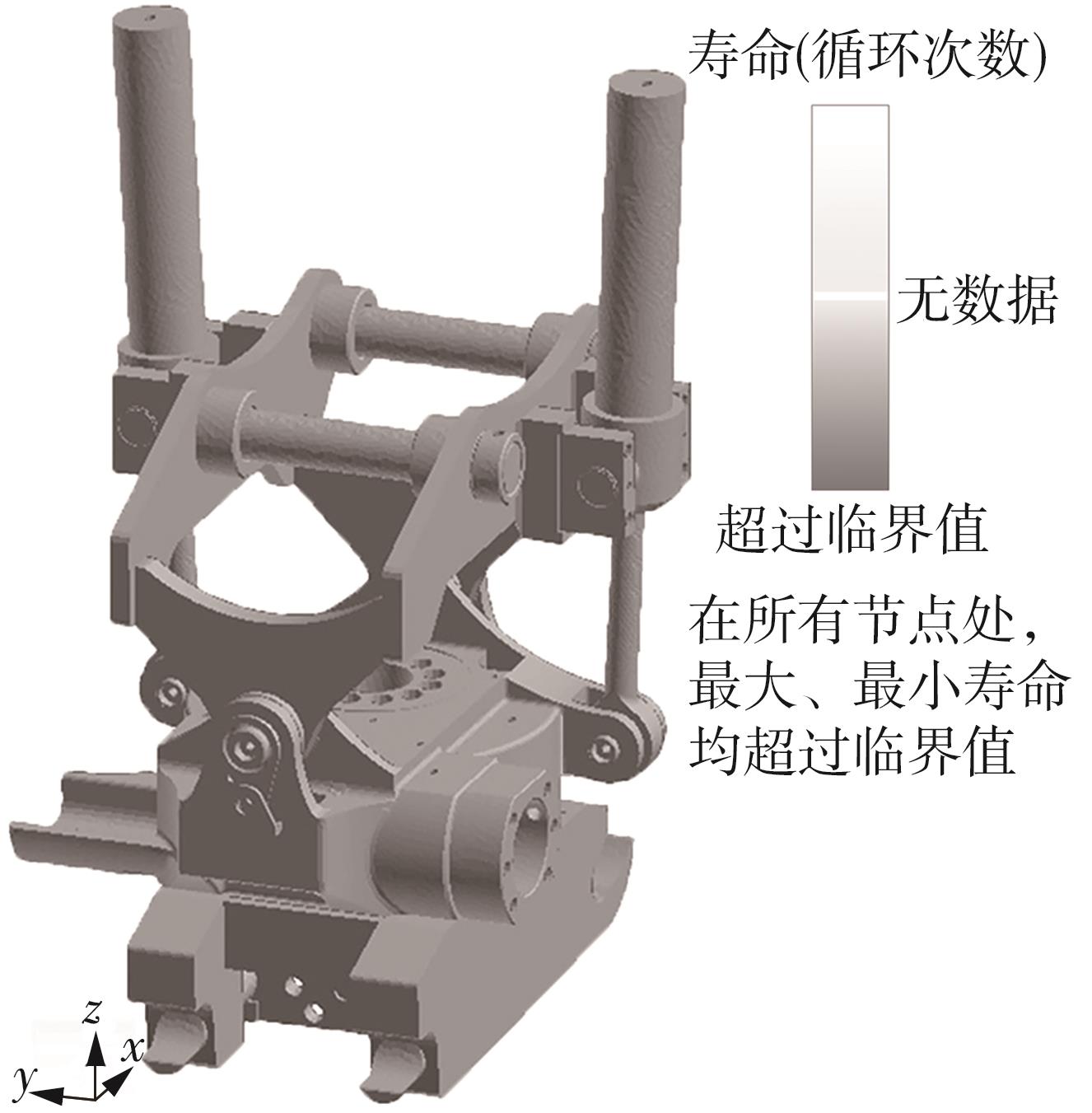
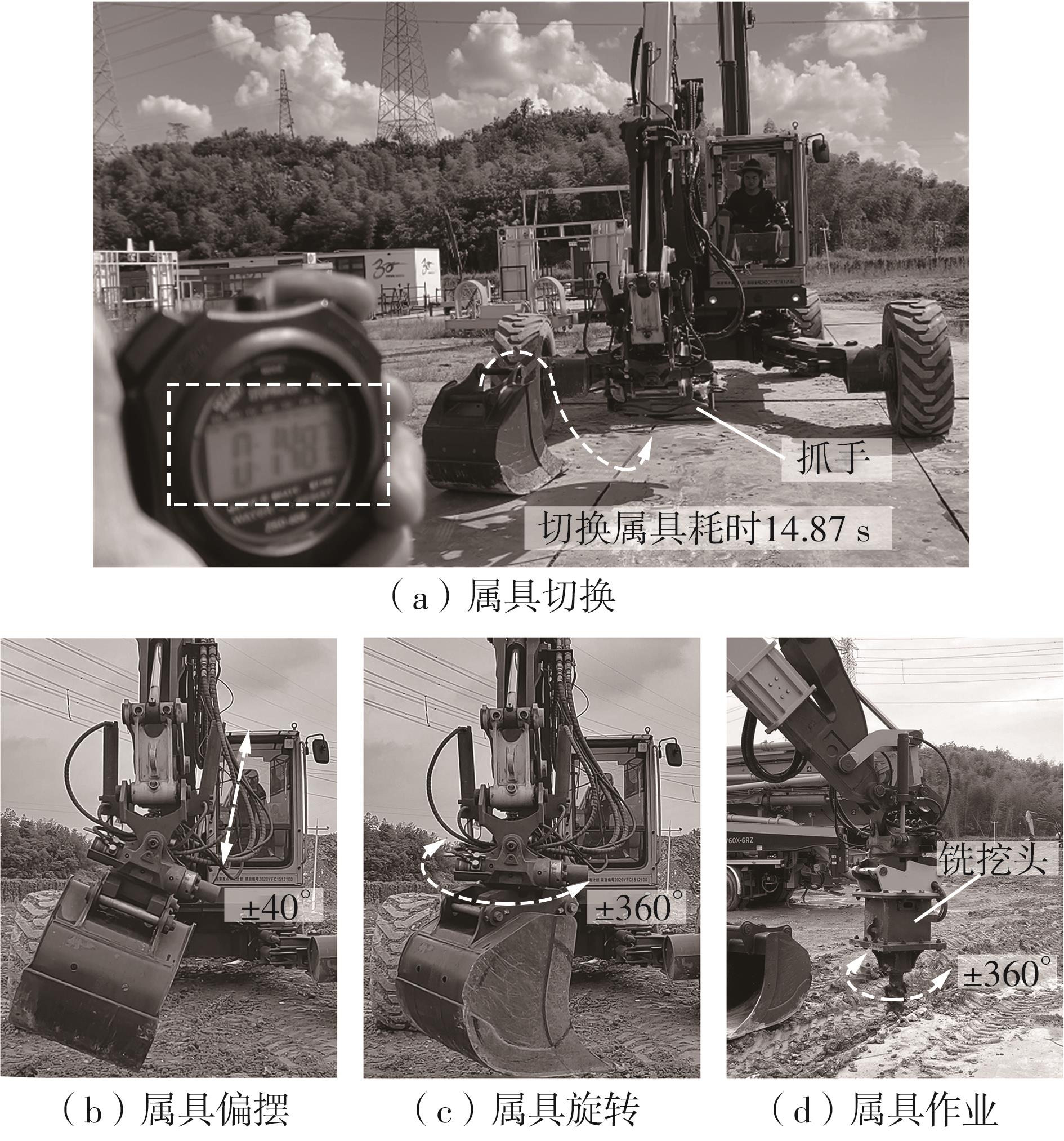
现有应急救援装备功能单一、灵活性不高,难以满足地震等地质灾害下的复杂应急作业需求。鉴于此,该文设计了一种可实现属具快速切换及位姿自由调整的机电液快换装置,该装置可快速集成到应急救援装备上完成高机动、多功能救援作业任务。首先,模拟分析了快换装置的极端受载特性及工作过程中的应力、应变情况,确定了装置的薄弱位置及载荷谱;然后,推导建立了确定性与随机性周期应力作用下考虑循环损伤强度退化的可靠性理论模型,明确了快换装置回转机构可靠度与失效率的映射关系;接着,基于线弹性断裂力学分析了倾斜油缸活塞杆薄弱件的裂纹扩展情况,采用局部应力应变法确定了快换装置的疲劳寿命,确保快换装置满足使用要求;最后,将快换装置集成到步履式救援机器人上进行测试和验证。结果表明,该快换装置可实现挖斗、抓手等各种属具的快速切换,切换时间小于15 s,同时增加了±40°的偏摆和±360°的旋转自由度,可满足多自由度灵活作业需求。该文研究成果可为同类快换装置的设计提供理论参考。
中图分类号: